Изобретение относится к области космической техники и может быть использовано для трехосной стабилизации экранированного космического аппарата (КА) в геомагнитном поле с целью повышения эффективности использования рабочих органов его электростатической защиты путем сопряжения защитных и стабилизирующих свойств этих рабочих органов.
Среди КА различных типов, различного назначения и разной степени защищенности от ионизирующих космических излучений выделяется категория КА, оснащенных системой активной электростатической защиты (ЭСЗ) [1]. Основным рабочим органом ЭСЗ является электрически заряженный экран, окружающий защищаемый объем и отталкивающий одноименно заряженные частицы от своей поверхности. Вследствие взаимодействия заряженного экрана ЭСЗ с магнитным полем Земли (МПЗ) возникает момент сил Лоренца, открывающий для экранированных КА новые возможности пассивной стабилизации КА по сравнению с известными ранее возможностями, основанными на взаимодействии КА с МПЗ посредством собственного магнитного момента КА, и используемыми в магнитных системах управления - как пассивных, так и активных.
Использование пассивных способов стабилизации КА предпочтительно в тех случаях, когда во время активной фазы полета отклонение КА от заданного положения в пространстве не должно превышать нескольких градусов, а также когда не требуется выполнения сложных программных разворотов и противодействия большим возмущающим моментам [2].
Для КА с существенно различающимися моментами инерции широко используются способы ориентации КА в орбитальной системе координат, основанные на взаимодействии КА с гравитационным полем Земли посредством гравитационного момента. Известны способы использования гравитационного момента для трехосной ориентации КА [3, 4], а также - для одноосной ориентации КА [5, 6, 7, 8].
Однако в чистом виде обычно использовать гравитационные моменты практически невозможно [3], поскольку из-за отсутствия в космосе внешней среды, способствующей эффективному рассеиванию кинетической энергии вращательного движения КА, он будет совершать незатухающие колебания, амплитуды которых определяются начальными отклонениями осей системы координат, связанной с КА, от осей орбитальной системы координат. Для погашения этих колебаний, как правило, приходится применять активное управление с использованием моментов сил негравитационной природы. Так, в известном способе [9] используется комбинированная система управления, в которой наряду с гравитационным моментом, создаваемым самовыдвигающейся гравитационной штангой с концевым грузом, имеется двухстепенной гироскоп с датчиком момента на оси подвеса, выполняющий функцию концевого груза. В известных способах [5, 6, 7] наряду с гравитационными моментами используются аэродинамические моменты, а также реактивные двигатели ориентации для выставки оси КА на центр Земли и для закрутки КА вокруг этой оси с определенной угловой скоростью.
Для рассеивания кинетической энергии колебаний КА достаточно эффективно используются различные варианты взаимодействия КА с МПЗ (демпфирующие магнитные моменты, гистерезис в ферромагнитных материалах, токи Фуко и др.). Так, в известном способе [3] используются демпфирующие моменты магнитного взаимодействия КА с МПЗ, формируемые как функции времени в соответствии с показаниями магнитометров.
Взаимодействие КА с МПЗ активно используется в различных вариантах магнитных систем управления (МСУ) [10, 11], причем не только для создания демпфирующих моментов, но и для создания восстанавливающих моментов. Возможность использования электромагнитов в качестве исполнительных органов МСУ позволяет МСУ успешно конкурировать с реактивными системами управления. Тем более, что МСУ совершенно не нуждаются в расходовании какого-либо рабочего тела, запас которого на борту КА ограничен.
К числу недостатков МСУ следует отнести то, что МСУ не могут создавать управляющий момент относительно направления, совпадающего с вектором магнитной индукции МПЗ, а также не могут создавать независимые моменты сил относительно всех осей управления одновременно. Поэтому МСУ часто дополняется другими средствами управления. Например, МСУ часто комплексируется с системой двигателей-маховиков в магнито-гироскопических системах ориентации (МГСО) КА.
Примерами реализации МГСО могут служить известные способы [12, 13]. Способ [12] предполагает во-первых, измерение вектора магнитной индукции МПЗ с помощью магнитометров, установленных на КА по осям связанной системы координат и, во-вторых, - определение положения КА в географической системе координат и вычисление соответствующего этому положению вектора магнитной индукции МПЗ в проекциях на оси орбитальной системы координат по Международной аналитической модели МПЗ. Затем производится сравнение результатов измерения с соответствующими расчетными значениями вектора магнитной индукции. По результатам сравнения формируются управляющие моменты, создаваемые магнитоприводом за счет взаимодействия его собственного магнитного момента с МПЗ. Существенным элементом МГСО является гиростабилизатор, представляющий собой двигатель-маховик, вращающийся с постоянной относительной угловой скоростью вокруг той оси КА, которая в ориентированном положении КА должна совпадать с бинормалью к орбите КА. Наличие гиростабилизатора в МГСО позволяет ослабить влияние на точность ориентации КА вышеупомянутого недостатка МСУ, обусловленного неспособностью МСУ создавать управляющий момент по направлению вектора магнитной индукции МПЗ.
Похожий вариант МГСО применяется в известном способе [13]. В отличие от способа [12], в [13] используется возможность изменения относительной угловой скорости вращения маховика для создания управляющего момента по оси тангажа. В результате, сочетание основного управления с помощью магнитных моментов, создаваемых электромагнитами, с управлением двигателем-маховиком обеспечивает полную управляемость КА по оси тангажа.
Однако использование двигателей-маховиков в МГСО требует размещения на КА дополнительных электромеханических устройств, усложняющих систему управления и увеличивающих массу и габариты КА. Например, в способе [13] используется трехкомпонентный датчик кинетического момента для предварительного успокоения КА и сброса кинетического момента инерционной механической системы.
К недостаткам способа [12] следует отнести отсутствие возможности ориентирования КА относительно орбитальной системы координат, используя показания одних магнитометров и не применяя дополнительных данных от сторонних датчиков внешней информации, таких как датчики Солнца, датчики звезд и неприменимость способа для габаритных и тяжелых КА.
В известном способе [14], частично преодолевающем недостатки способа [13], предложен способ управления КА, способный восстанавливать ориентацию КА относительно ОСК из произвольного неориентированного положения, используя измерения одних лишь магнитометров по принципу «слепой спутник», причем независимо от массы и габаритов КА. Этот способ ориентации КА в МПЗ позволяет полностью освободиться от датчиков внешней информации и выполнять восстановление ориентации КА в орбитальной системе координат в любой момент времени и на любом участке орбиты.
Однако известный способ [14] опирается на использование гироскопических датчиков угловых скоростей для определения проекций абсолютной угловой скорости КА на оси связанной с КА системы координат с дальнейшим использованием этой информации для формирования сигналов управления, которые, в свою очередь, передаются на активные исполнительные органы, в качестве которых предложены универсальные датчики моментов или реактивные двигатели. Таким образом, содержащаяся в [14] идея автономизации управления по принципу «слепой спутник», принципиально опирающаяся на использование МПЗ, остается не полностью реализованной, поскольку для создания управляющих моментов, согласно [14], приходится использовать исполнительные органы активной системы управления.
Отказ от использования активной системы управления реализован в известном способе управления ориентацией КА [15], включающем получение управляющего лоренцева момента при воздействии МПЗ на электрически заряженную часть поверхности (экран) КА и согласованное изменение величин электрического заряда и координат центра заряда относительно центра масс КА. Известный способ основан на создании и последующем использовании смещения центра заряда относительно центра масс КА.
Аналогичный подход к использованию взаимодействия КА с МПЗ для создания управляющего момента применен в известном способе [16]. Согласно известному способу [16] на части поверхности КА распределяют двойной электростатический слой. При взаимодействии этого слоя с МПЗ, вследствие орбитального движения КА, возникает управляющий момент лоренцевых сил. Для управления ориентацией КА с осевой динамической симметрией в орбитальной системе координат изменяют величину и направление вектора дипольного момента двойного слоя в соответствии с проекциями скорости центра масс и вектора геомагнитной индукции на оси орбитальной системы координат.
Известный способ [16] выбран в качестве наиболее близкого аналога (прототипа) к заявляемому в п. 1 изобретения способу.
Недостаток известного способа [16] обусловлен принципиальной необходимостью перераспределения заряда на поверхности защитного экрана с целью изменения вектора дипольного момента двойного слоя (смещения центра заряда относительно центра масс КА в [15]). Этот способ не работает при отсутствии такого смещения, что имеет место при центрально-симметричном распределении заряда экрана. Однако центрально-симметричное распределение заряда является характерным для многих известных вариантов реализации электростатической защиты КА. Например, заряженные экраны сферической, цилиндрической и тороидальной формы, отличающиеся центрально-симметричным распределением заряда, рассматриваются как вполне возможные, эффективные для радиационной защиты и удобные для реализации [1, 17].
Известно устройство [18] для управления ориентацией КА, а именно система электродов, имитирующих управляемый электростатический слой на поверхности КА, выполненная с возможностью электрической связи с системой управления КА, реализованной известным способом [16], которое обеспечивает изменение электрического заряда и координат центра заряда, приводящее к изменению управляющего момента. Известное устройство [18] выбрано в качестве наиболее близкого аналога (прототипа) для заявляемого в изобретении п. 2 устройства.
Задача изобретения заключается в расширении области применимости способа управления ориентацией КА, основанного на использовании лоренцева момента, в распространении его на экранированные КА с центрально-симметричным распределением заряда, в упрощении системы управления и, тем самым, в повышении ее надежности путем отказа от непрерывного изменения распределения заряда по поверхности экрана, а также в повышении эффективности использования экранов электростатической защиты КА путем сопряжения защитных и стабилизирующих свойств экранов.
Задача решена тем, что в известном способе управления ориентацией КА, включающем получение восстанавливающего момента лоренцевых сил путем распределения на части поверхности КА электростатического заряда, взаимодействующего с геомагнитным полем, в соответствии с изобретением вокруг КА размещают систему из трех бесконтактных с взаимно ортогональными осями вращения концентрических торов, проводящие поверхности которых заряжают от бортовой системы электростатической зарядки, систему управления замыканием и размыканием двух половин тора, ось вращения которого в целевом прямом положении равновесия КА в орбитальной системе координат направлена по касательной к орбите, а каждую из половин этого тора независимо подключают для зарядки к бортовой системе, катушку индуктивности с осью, коллинеарной оси вращения тора, направленной по нормали к плоскости орбиты в целевом прямом положении равновесия КА в орбитальной системе координат, пассивную магнитную систему демпфирования, работающую в течение всего переходного процесса стабилизации с режимом предварительного успокоения углового движения КА, при котором отрицательный заряд подают на обращенную к Земле половину тора в целевом положении равновесия и незаряженных других двух торах, а для создания собственного магнитного момента КА на обмотку катушки индуктивности подают электрический ток, после чего завершают режим предварительного успокоения и приводят КА в целевое положение трехосной ориентации, затем отключают подачу тока на катушку индуктивности и осуществляют зарядку торов для обеспечения электростатической защиты КА, при этом для КА, имеющего равные моменты инерции, удовлетворяют неравенствам
 ,
,
а для КА с неравными главными центральными моментами инерции А, В, С удовлетворяют неравенствам

где: Qi - электрический заряд i-го тора (i=1,2,3), Ri - большой радиус i-го тора, ri - малый радиус i-го тора, δ=В/А, ε=С/А, b2=a2/a1, b3=а3/a1, с=-g10a1(ω0-ωE)(RE/R)3/(Aω02),
g10 - первый гауссов коэффициент потенциала геомагнитного поля, ω0 - угловая скорость орбитального движения КА, ωE - угловая скорость суточного вращения Земли, RE - средний радиус Земли, R - радиус орбиты КА.
Прямым положением равновесия КА в орбитальной системе координат Сξηζ называем такое его положение, при котором ось Cz направлена по оси Сζ, совпадающей с местной вертикалью, ось Су направлена по оси Сη, перпендикулярной к плоскости орбиты, а ось Сх направлена по оси Сξ, касательной к орбите.
Задача решена тем, что в устройстве для пассивной стабилизации КА, включающем три независимо заряжаемых концентрических тороидальных поверхности с взаимно ортогональными осями вращения, систему управления замыканием и размыканием двух половин тора, ось вращения которого в положении равновесия направлена по касательной к орбите, а каждая из половин этого тора может заряжаться независимо, и катушку индуктивности, ось которой коллинеарна оси вращения тора, направленной по нормали к плоскости орбиты в программном режиме движения, в соответствии с изобретением каждую из трех тороидальных поверхностей заряжают электростатическими зарядами, величины которых согласованы и удовлетворяют вышеприведенным неравенствам на параметры КА.
Технический результат, достигаемый изобретением, состоит в том, что создание системы трех заряженных концентрических тороидальных поверхностей с взаимно ортогональными осями вращения приводит к возбуждению момента сил Лоренца, воздействующего на КА и оказывающего ориентирующее действие, а выполнение условий на величины зарядов поверхностей обеспечивает существование и устойчивость положения равновесия КА и при наличии демпфирования (обеспечиваемого каким-либо из известных способов - например, путем использования гистерезисных стержней) решает задачу трехосной стабилизации КА в орбитальной системе координат.
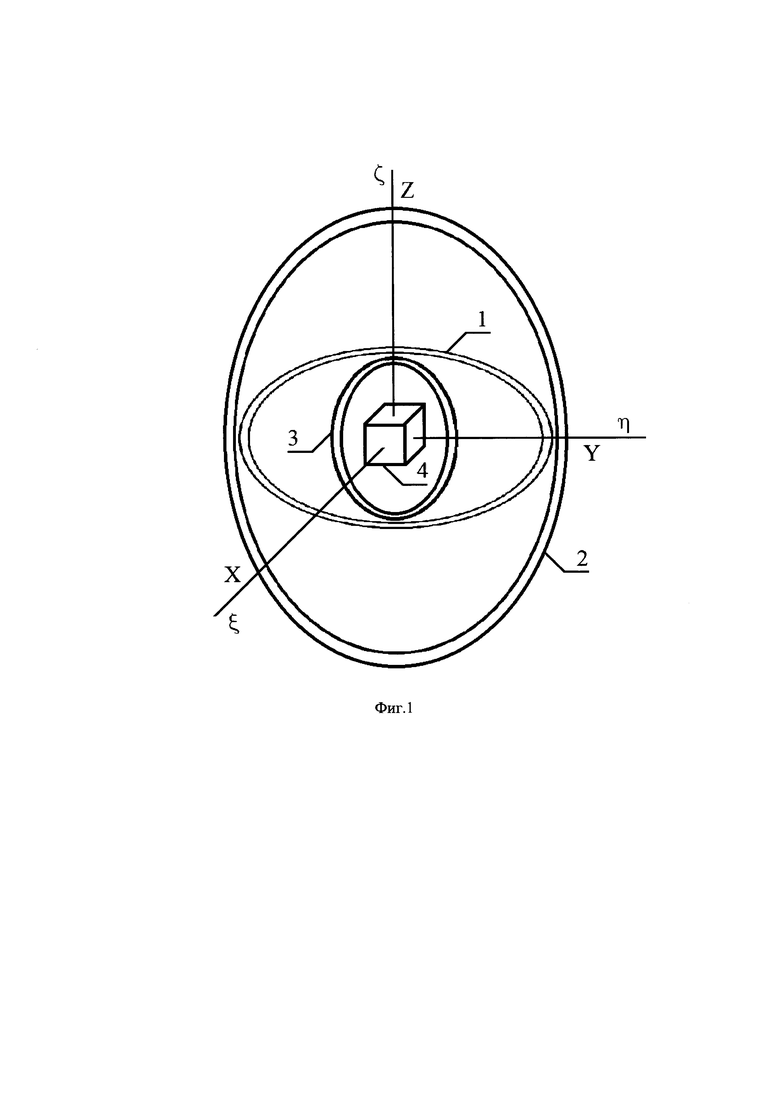
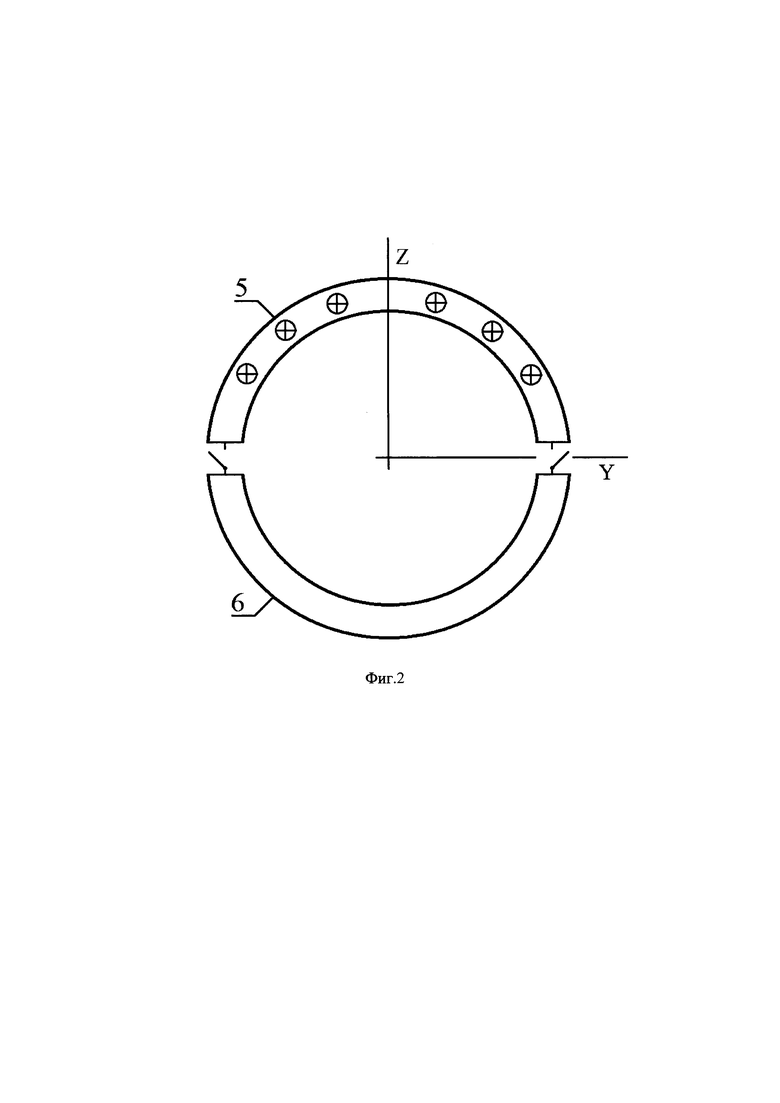
Сущность изобретения поясняется Фиг. 1, на которой представлена система трех концентрических тороидальных поверхностей 1, 2, 3, окружающих защищаемый корпус КА 4 и имеющих взаимно ортогональные оси вращения, и Фиг. 2, на которой представлена схема разделения тороидальной поверхности 2 на две части 5 и 6, допускающие возможность независимой зарядки.
Сущность изобретения заключается в следующем. Для КА, центр масс которого (точка С) движется со скоростью  относительно МПЗ, характеризуемого магнитной индукцией В, распределение на поверхности с площадью S электростатического заряда с плотностью σ приводит к возникновению момента ML лоренцевых сил, определяемого по формуле [9]
относительно МПЗ, характеризуемого магнитной индукцией В, распределение на поверхности с площадью S электростатического заряда с плотностью σ приводит к возникновению момента ML лоренцевых сил, определяемого по формуле [9]

где  магнитная индукция МПЗ в точке С;
магнитная индукция МПЗ в точке С;  угловая скорость КА относительно МПЗ;
угловая скорость КА относительно МПЗ;  угловая скорость орбитальной системы координат относительно инерциальной;
угловая скорость орбитальной системы координат относительно инерциальной;  угловая скорость суточного вращения Земли; DC тензор 2-го ранга с компонентами Dij (i, j = 1, 2, 3). называемый градиентом ноля вектора
угловая скорость суточного вращения Земли; DC тензор 2-го ранга с компонентами Dij (i, j = 1, 2, 3). называемый градиентом ноля вектора  и используемый при моделировании неоднородности МПЗ. Операция ⋅ ⋅ означает двойное скалярное произведение. Для тензоров 2-го ранга эта операция определяется как
и используемый при моделировании неоднородности МПЗ. Операция ⋅ ⋅ означает двойное скалярное произведение. Для тензоров 2-го ранга эта операция определяется как

Электростатические свойства заряженной поверхности характеризуются тензором заряда ∑=diag (а1, а2, а3) в главных центральных осях заряда  с единичными векторами
с единичными векторами  . Начало системы координат
. Начало системы координат  взято в центре заряда, определяемом следующим радиус-вектором относительно центра масс КА:
взято в центре заряда, определяемом следующим радиус-вектором относительно центра масс КА:

Здесь  - радиус-вектор элемента dS относительно центра масс KA,σ - плотность поверхностного распределения заряда. Элементы тензора ∑ определяются следующим образом:
- радиус-вектор элемента dS относительно центра масс KA,σ - плотность поверхностного распределения заряда. Элементы тензора ∑ определяются следующим образом:

Наряду с главными центральными осями инерции Cxyz вводится в рассмотрение система координат Oq1q2q3, оси которой Oq1, Oq2, Oq3 параллельны осям Сх, Су, Cz соответственно. Ориентация осей  относительно соей Oq1q2q3 определяется матрицей направляющих косинусов А0:
относительно соей Oq1q2q3 определяется матрицей направляющих косинусов А0:
так, что 
Статические моменты заряда первого и второго порядков в системе координат Oq1q2q3 вводятся так, что они определяются тензорными величинами Q(1), Q(2) с элементами

В силу выбора системы координат Oq1q2q3 имеет место равенство Q(1)=0. Тензоры Q(2) и ∑ связаны соотношением  . В рассматриваемом случае трех концентрических тороидальных оболочек центр заряда О совпадает с центром масс С, а главные оси эллипсоида заряда совпадают с главными осями эллипсоида инерции. Поэтому
. В рассматриваемом случае трех концентрических тороидальных оболочек центр заряда О совпадает с центром масс С, а главные оси эллипсоида заряда совпадают с главными осями эллипсоида инерции. Поэтому  при i ≠ j. Для нахождения a1, а2, а3 рассмотрим тор №1, имеющий ось вращения Z, и введем для него параметризацию вида
при i ≠ j. Для нахождения a1, а2, а3 рассмотрим тор №1, имеющий ось вращения Z, и введем для него параметризацию вида
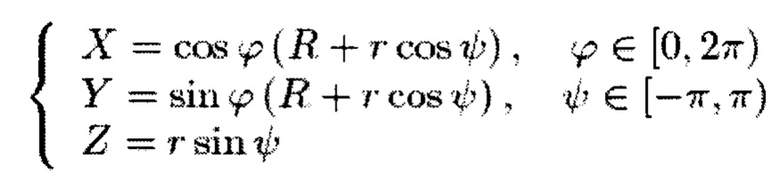
Аналогичным образом параметризуются тор №2, имеющий ось вращения X, и тор №3. имеющий ось вращения Y. Для плотности  распределения заряда по поверхности тора значения a1, a2, a3 вычисляются по-отдельности для каждого из торов. Для первого тора они снабжены верхним индексом 1 и равны
распределения заряда по поверхности тора значения a1, a2, a3 вычисляются по-отдельности для каждого из торов. Для первого тора они снабжены верхним индексом 1 и равны
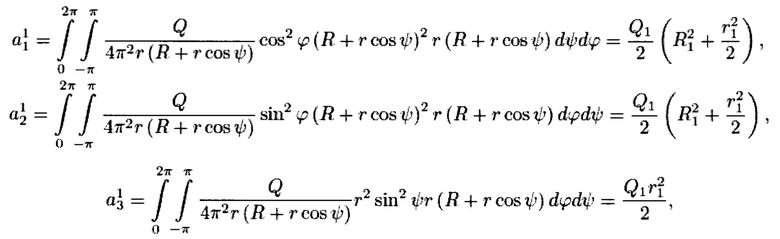
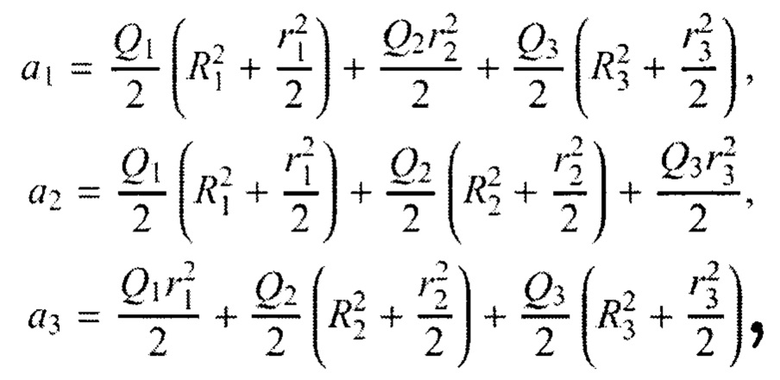
Аналогично находятся a1, а2, а3 для остальных двух торов:
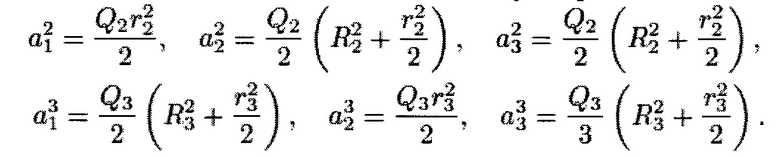
В результате, для всей системы трех торов получаем следующие выражения компонент (2) тензора заряда:
Покажем, что при определенных условиях момент ML, определяемый формулой (1), оказывает ориентирующее воздействие на КА и может использоваться в качестве восстанавливающего момента. При описании МПЗ будем использовать модель  магнитного диполя. Для КА, находящихся на орбитах, близких к экваториальной, скорость vc определяется равенством
магнитного диполя. Для КА, находящихся на орбитах, близких к экваториальной, скорость vc определяется равенством  . Тогда проекции момента (1) на главные центральные оси инерции КА имеют вид
. Тогда проекции момента (1) на главные центральные оси инерции КА имеют вид

где RE - радиус Земли, g10 - первый гауссов коэффициент в разложении геомагнитного потенциала.
Угловое движение КА под действием лоренцева момента ML и гравитационного момента MG описывается динамическими уравнениями Эйлера

где Мх=MLx+MGx, My=MLy+MGy, Mz=MLz+MGz. Проекции момента  на оси х, у, z имеют вид [10]
на оси х, у, z имеют вид [10]

Уравнения (6), (7), (8) совместно с кинематическими уравнениями Пуассона

образуют замкнутую дифференциальную систему, допускающую первый интеграл

На основании уравнений (7), (9) легко видеть, что KA имеет положение равновесия, в котором оси  и x, y, z совпадают соответственно с осями
и x, y, z совпадают соответственно с осями  . В этом положении, называемом прямым положением равновесия в орбитальной системе координат, α1 = 1, β2 = 1, γ3 = 1 и p = q = r = 0.
. В этом положении, называемом прямым положением равновесия в орбитальной системе координат, α1 = 1, β2 = 1, γ3 = 1 и p = q = r = 0.
Переходя к анализу устойчивости прямого положения равновесия КА, рассмотрим вначале случай А=В=С, когда гравитационный момент равен нулю. В этом случае первый интеграл (10) преобразуем к виду

Выражение (11) представляет собой квадратичную форму, которую можно принять в качестве функции Ляпунова. В соответствии с теоремой Ляпунова положительная определенность квадратичной формы (11) гарантирует устойчивость прямого положения равновесия КА. Следовательно, при выполнении неравенств

прямое положение равновесия КА является устойчивым благодаря воздействию лоренцева момента. Подставляя выражения (3), (4), (5) в неравенства (12), получим:

откуда следует:

Легко видеть, что подходящим выбором зарядов и геометрических параметров экранов ЭСЗ можно обеспечить устойчивость экранированного КА с помощью лоренцева момента. В этом случае система заряженных экранов обеспечивает радиационную защиту и одновременно обеспечивает трехосную угловую стабилизацию КА.
В общем случае А ≠ В ≠ С гравитационный момент влияет на устойчивость КА в положении равновесия. Для дальнейшего исследования перепишем первый интеграл (10) в виде

Отсюда следует, что достаточные условия устойчивости прямого положения равновесия КА в орбитальной системе координат могут быть представлены в форме системы неравенств

В обозначениях

система (14) принимает вид

Область устойчивости, соответствующая неравенствам (15), зависит от гравитационных параметров δ и ε и электростатических параметров b2, b3, с.
Для получения восстанавливающего лоренцева момента  , превышающего действующие возмущающие моменты, можно варьировать параметры тороидальных экранов. Оценим величину исходя из данных, приведенных в [1, 8]. Пусть параметры, тора R=45 м, r=5 м, потенциал на поверхности тора U=3 ⋅ 108 В, поверхностная емкость материала c=10-11Ф/м2. Тогда площадь поверхности тора S=8883 м2, распределенный по его поверхности заряд Q=cSU=26.6 Kл, a1=27148Kл м2, а величина составляющей момента
, превышающего действующие возмущающие моменты, можно варьировать параметры тороидальных экранов. Оценим величину исходя из данных, приведенных в [1, 8]. Пусть параметры, тора R=45 м, r=5 м, потенциал на поверхности тора U=3 ⋅ 108 В, поверхностная емкость материала c=10-11Ф/м2. Тогда площадь поверхности тора S=8883 м2, распределенный по его поверхности заряд Q=cSU=26.6 Kл, a1=27148Kл м2, а величина составляющей момента  , создаваемой этим тором, равна 6.2 ⋅ 10-4 Нм. Главный момент лоренцевых сил, создаваемый системой из трех аналогичных торов, будет- иметь величину порядка 10-3 Нм, что превосходит величину гравитационного момента, действующего на крупный KA со сбалансированным распределением масс, или на KA, предварительно приведенный в положение, близкое к положению гравитационной ориентации.
, создаваемой этим тором, равна 6.2 ⋅ 10-4 Нм. Главный момент лоренцевых сил, создаваемый системой из трех аналогичных торов, будет- иметь величину порядка 10-3 Нм, что превосходит величину гравитационного момента, действующего на крупный KA со сбалансированным распределением масс, или на KA, предварительно приведенный в положение, близкое к положению гравитационной ориентации.
Таким образом, при выполнении неравенств (15) в условиях гравитационных возмущений достигается устойчивость стабилизируемого прямого положения равновесия и асимптотическая устойчивость при наличии демпфирования при достаточно малых значениях i, что служит обоснованием применения заявляемого способа для орбит малого наклонения.
Способ может быть осуществлен с помощью известных технических средств, позволяющих создать электростатический потенциал на тороидальных поверхностях, окружающих КА. Геометрические параметры поверхностей, величины зарядов и инерционные параметры КА определяются вышеприведенными неравенствами (15).
Задача обеспечения однозначности направления осей КА в базовой системе координат, при которой оси Cxyz не просто коллинеарны осям Сξηζ, но и совпадают с ними по направлениям, решена тем, что предлагаемый способ предусматривает, во-первых, разделение тора 2, ось вращения которого в положении равновесия направлена по касательной к орбите, на две равные части 5 и 6, каждая из которых может заряжаться независимо, и, во-вторых, размещение катушки индуктивности на оси вращения тора 3, для которого в положении равновесия эта ось направлена по нормали к плоскости орбиты.
На этапе предварительного успокоения углового движения КА и его приведения в прямое положение равновесия в орбитальной системе координат, заряд подается лишь на одну половину тора 2, а другие два тора остаются незаряженными. В зависимости от условий функционирования КА либо подается отрицательный заряд на ту половину тора, которая обращена к Земле в положении равновесия, либо положительный заряд подается на противоположную половину 5 тора 2 (Фиг 2). При этом возникает большой статический момент заряда, обеспечивающий, в соответствии с прототипом [16], ориентацию оси Сх вдоль оси Сζ, и ее стабилизацию в этом направлении при наличии демпфирования.
Кроме того, на этапе предварительного успокоения углового движения КА и его приведения в прямое положение равновесия в орбитальной системе координат, на обмотку катушки индуктивности подается электрический ток, создающий собственный магнитный момент КА, направленный вдоль оси Су и обеспечивающий, в соответствии с принципом работы магнитной системы управления [2], ориентацию оси Су вдоль вектора магнитной индукции МПЗ, т.е. вдоль оси Сη, и ее стабилизацию в этом направлении при наличии демпфирования.
После приведения КА в целевое положение трехосной ориентации все три тора заряжают зарядами, обеспечивающими функционирование системы электростатической защиты и удовлетворяющими неравенствам (15), ток перестают подавать на катушку индуктивности и в целом система ориентации КА продолжает функционировать в пассивном режиме.
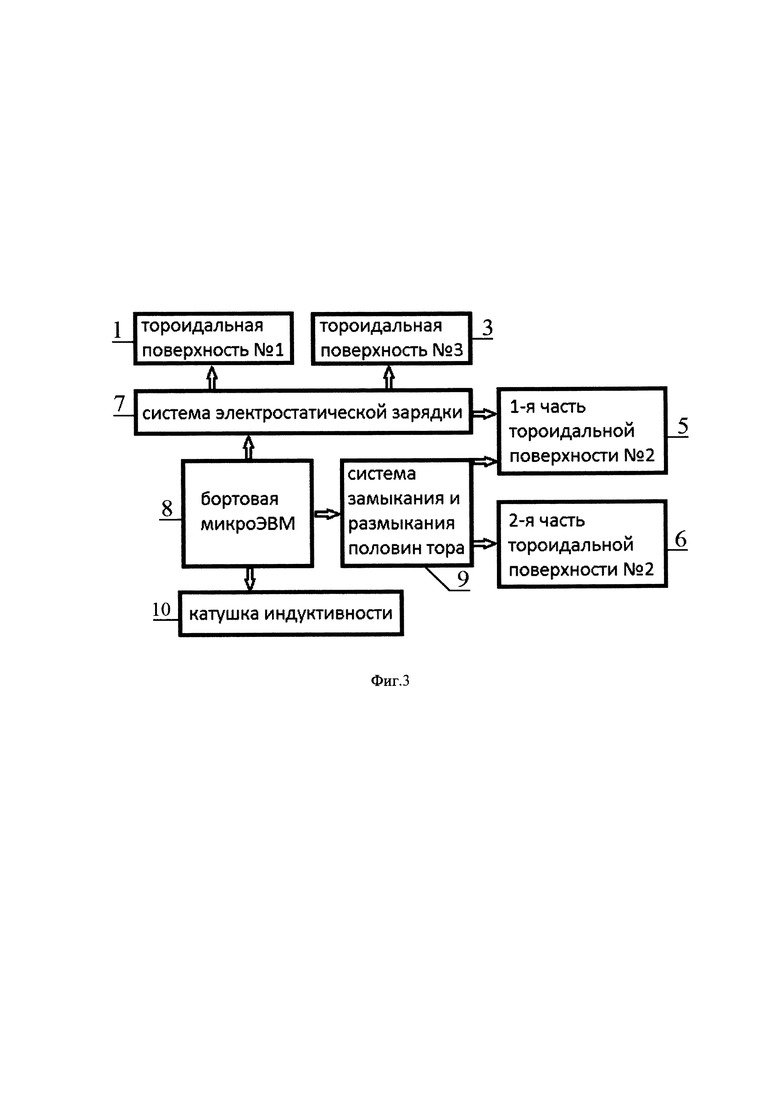
Заявляемый способ реализуется новым устройством для пассивной угловой стабилизации экранированного космического аппарата (КА), включающее систему электродов и управляемый источник питания, содержит три изолированные самозаряжаемые от бортовой системы концентрические тороидальные поверхности (Фиг. 1) с взаимно ортогональными осями вращения, жестко прикрепленные к КА, при этом электрические входы тороидальных поверхностей соединены с выходами системы электростатической зарядки 7, вход которой соединен с выходом бортовой микроЭВМ 8, включает систему 9 управления замыканием и размыканием двух электронезависимых половин тора 2, ось вращения которого Сх (Фиг. 2) в целевом положении равновесия направлена по касательной к орбите, причем вход системы управления замыканием и размыканием двух половин тора 2 соединен с выходом микроЭВМ 8, а выходы системы управления замыканием и размыканием двух половин тора соединены с соответствующими им половинами тора, катушку индуктивности 10, ось которой коллинеарна оси Су вращения тора, и направлена по нормали к плоскости орбиты в целевом положении равновесия, входы катушки индуктивности 10 соединены с выходами микро ЭВМ 8, а в корпусе КА 4 (Фиг. 1) расположена пассивная система демпфирования, выполненная по одному из вариантов, использующих взаимодействие КА с геомагнитным полем.
В соответствии с неравенствами (13) система тороидальных поверхностей строится как показано на Фиг. 1: наибольший по размеру тор (№2 на Фиг. 1) имеет ось вращения, совпадающую с направлением касательной к орбите в целевом положении КА, средний по размеру тор (№1 на Фиг. 1) имеет ось вращения, совпадающую с местной вертикалью в программном движении КА, а наименьший по размеру тор (№3 на Фиг. 1) имеет ось вращения, совпадающую с нормалью к плоскости орбиты в программном движении КА. При этом тор №2 состоит из двух частей 5 и 6 (Фиг. 2), способных заряжаться независимо, а индукционная катушка 10 (Фиг. 3) имеет ось, коллинеарную оси вращения 3-го тора. Структурная схема устройства показана на Фиг. 3. При этом элементы 1 и 3 на Фиг. 3 соответствуют элементам 1 и 3, обозначенным на Фиг. 1, а элементы 5 и 6 на Фиг. 3 соответствуют элементам 5 и 6, обозначенным на Фиг. 2.
Предложенная система интегрированного использования электростатических экранов позволяет совместить защитные и стабилизирующие свойства экранов. При этом полностью отсутствует необходимость в установке гироскопов, маховиков и т.п., обеспечивающих угловую стабилизацию КА, а также в расходовании какого-либо рабочего вещества исполнительным механизмом. Очевидная простота и пассивный характер системы стабилизации, а также надежность и экономичность способа свидетельствуют в пользу перспективности его использования для стабилизации КА.
Список использованной литературы:
1. Труханов К.А., Рябова Т.Я., Морозов Д.Х. Активная защита космических кораблей. М., Атомиздат, 1970. 229 с.
2. Сарычев В.А., Овчинников М.Ю. Магнитные системы ориентации искусственных спутников Земли. "Исследование космического пространства, т. 23 (Итоги науки и техники ВИНИТИ АН СССР)" М., 1985. 104 с.
3. Способ ориентации и система ориентации для реализации способа. Патент RU 2150412 С1 от 11.03.1999.
4. Способ пространственной ориентации микроспутника. Патент RU 2685948 С1 от 02.04.2018.
5. Способ одноосной ориентации космического аппарата вытянутой формы. Патент RU 2594054 С1 от 02.02.2015.
6. Способ одноосной ориентации космического аппарата вытянутой формы. Патент RU 2594056 С1 от 02.02.2015.
7. Способ одноосной ориентации космического аппарата вытянутой формы. Патент RU 2594057 С1 от 02.02.2015.
8. Способ одноосной ориентации космического аппарата вытянутой формы. Патент RU 2764815 С1 от 14.09.2020.
9. Комбинированная гравитационная система ориентации малого космического аппарата. Патент RU 2658070 С2 от 18.04.2016.
10. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г.
11. Овчинников М.Ю., Пеньков В.И., Ролдугин Д.С., Иванов Д.С. Магнитные системы ориентации малых спутников. М.: ИПМ им. М.В. Келдыша, 2016. 366 с.
12. Козаков А.В. Магнитогироскопическая система - достойный соперник гравитационной системы ориентации на малых спутниках // Вопросы электромеханики. Труды ВНИИЭМ. 2001. Т. 100. С. 156--176.
13. Способ ориентации космического аппарата и устройство для реализации способа. Патент RU 2618664 С1 от 25.01.2016.
14. Способ ориентации околоземного орбитального космического аппарата. Патент RU 2779658 С1 от 19.03.2021.
15. Способ управления ориентацией искусственного спутника Земли. Патент RU 2159201 С2 от 29.10.1998.
16. Способ полупассивной трехосной стабилизации динамически симметричного искусственного спутника Земли. Патент RU 2332334 С1 от 24.10.2006 (прототип для п. 1 ф-лы).
17. Joshi R.P., Qiu Н., Tripathi R.K. Configuration studies for active electrostatic space radiation shielding // Acta Astronautica 88 (2013) 138-145.
18. Способ полупассивной стабилизации искусственного спутника Земли и устройство для его реализации. Патент RU 2191146 С1 от 16.03.2001 (прототип для п. 2 ф-лы).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУПАССИВНОЙ ТРЕХОСНОЙ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИ СИММЕТРИЧНОГО ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2006 |
|
RU2332334C1 |
| СПОСОБ ПОЛУПАССИВНОЙ СТАБИЛИЗАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2191146C1 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЭЛЕКТРОДИНАМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ ДЛЯ УДАЛЕНИЯ КОСМИЧЕСКОГО МУСОРА | 2017 |
|
RU2666610C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 1998 |
|
RU2159201C2 |
| Демпфирующее устройство для стабилизации электродинамической тросовой системы | 2018 |
|
RU2709295C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ | 1992 |
|
RU2020112C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2408508C1 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |
Группа изобретений относится к области космической техники, в частности к пассивным системам управления ориентацией КА. Для стабилизации углового положения КА вокруг его поверхности размещают систему трех концентрических тороидальных поверхностей, несущих электростатические заряды. При взаимодействии магнитного поля Земли с заряженными поверхностями возникает момент лоренцевых сил, который используется для стабилизации КА. Геометрические параметры и заряды торов выбирают в соответствии с условиями, учитывающими гравитационные возмущения, что позволяет при наличии демпфирования решить задачу стабилизации КА. Для трехосной стабилизации КА с однозначным направлением осей, связанных с КА, один из торов выполнен в виде двух равных частей, снабженных управляемыми контактами и способных заряжаться независимо, а вдоль оси вращения другого тора расположена катушка индуктивности, предназначенная для создания собственного магнитного момента КА на этапе предварительного успокоения и приведения КА в положение равновесия. Достигается повышение надежности и эффективности системы управления ориентацией КА, основанного на использовании лоренцева момента. 2 н.п. ф-лы, 3 ил.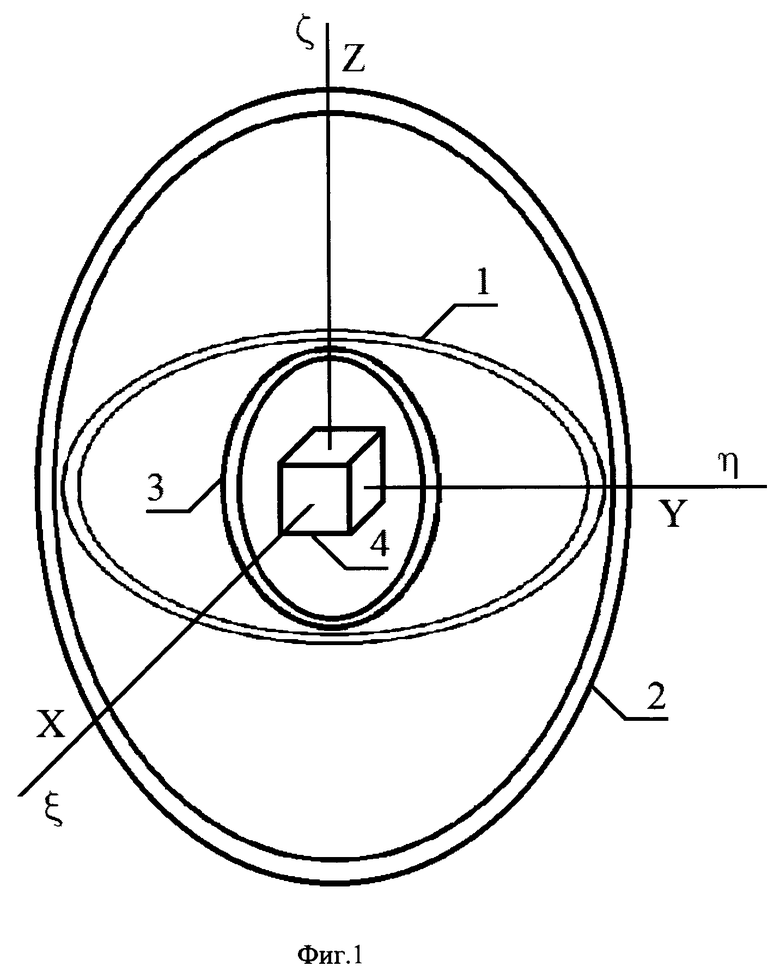
1. Способ трехосной стабилизации экранированного космического аппарата (КА) с центрально-симметричным распределением заряда электростатической защиты, включающий получение восстанавливающего момента лоренцевых сил путем распределения на части поверхности КА электростатического заряда, взаимодействующего с геомагнитным полем, отличающийся тем, что вокруг КА размещают систему из трех бесконтактных с взаимно ортогональными осями вращения концентрических торов, проводящие поверхности которых заряжают от бортовой системы электростатической зарядки, систему управления замыканием и размыканием двух половин тора, ось вращения которого в целевом прямом положении равновесия КА в орбитальной системе координат направлена по касательной к орбите, а каждую из половин этого тора независимо подключают для зарядки к бортовой системе, катушку индуктивности с осью, коллинеарной оси вращения тора, направленной по нормали к плоскости орбиты в целевом прямом положении равновесия КА в орбитальной системе координат, пассивную магнитную систему демпфирования, работающую в течение всего переходного процесса стабилизации с режимом предварительного успокоения углового движения КА, при котором отрицательный заряд подают на обращенную к Земле половину тора в целевом положении равновесия и незаряженных других двух торах, а для создания собственного магнитного момента КА на обмотку катушки индуктивности подают электрический ток, после чего завершают режим предварительного успокоения и приводят КА в целевое положение трехосной ориентации, затем отключают подачу тока на катушку индуктивности и осуществляют зарядку торов для обеспечения электростатической защиты КА, при этом: для КА, имеющего равные моменты инерции, удовлетворяют неравенствам
 ,
,
а для КА с неравными главными центральными моментами инерции А, В, С удовлетворяют неравенствам
 ,
,
где Qi - электрический заряд i-го тора (i=1, 2, 3), Ri - большой радиус i-го тора, ri - малый радиус i-го тора, δ=В/А, ε=С/А, b2=а2/а1, b3=а3/а1, с=-g10a1(ω0-ωE)(RE/R)3/{Аω02),
g10 - первый гауссов коэффициент потенциала геомагнитного поля, ω0 - угловая скорость орбитального движения КА, ωE - угловая скорость суточного вращения Земли, RE - средний радиус Земли, R - радиус орбиты КА.
2. Устройство для пассивной угловой стабилизации экранированного космического аппарата (КА), включающее систему электродов и управляемый источник питания, отличающееся тем, что устройство дополнительно содержит три изолированные самозаряжаемые от бортовой системы концентрические тороидальные поверхности с взаимно ортогональными осями вращения, жестко прикрепленные к КА, при этом электрические входы тороидальных поверхностей соединены с выходами системы электростатической зарядки, вход которой соединен с выходом бортовой микроЭВМ, включает систему управления замыканием и размыканием двух электронезависимых половин тора, ось вращения которого в целевом положении равновесия направлена по касательной к орбите, причем вход системы управления замыканием и размыканием двух половин тора соединен с выходом микроЭВМ, а выходы системы управления замыканием и размыканием двух половин тора соединены с соответствующими им половинами тора, катушку индуктивности, ось которой коллинеарна оси вращения тора и направлена по нормали к плоскости орбиты в целевом положении равновесия, входы катушки индуктивности соединены с выходами микроЭВМ, а в корпусе КА расположена пассивная система демпфирования, выполненная по одному из вариантов, использующих взаимодействие КА с геомагнитным полем.
| СПОСОБ ПОЛУПАССИВНОЙ СТАБИЛИЗАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2191146C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| Устройство формирования механического момента электромагнитом в магнитной системе ориентации космического аппарата | 2016 |
|
RU2672316C2 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| JP 6321198 A, 22.11.1994. | |||

