Изобретение относится к области космической техники и может быть использовано для удаления космического мусора из околоземного пространства.
В настоящее время, по оценкам Orbital Debris Program Office (NASA), в околоземном пространстве находится примерно 23000 объектов космического мусора с характерными размерами более 10 см, 500000 объектов космического мусора с характерными размерами от 1 до 2.5 см и более 100 миллионов объектов космического мусора с характерными размерами порядков 1 мм и меньше [1]. Все эти объекты космического мусора (ОКМ) представляют опасность для искусственных спутников Земли (ИСЗ), пилотируемых космических аппаратов и орбитальных станций. При этом, как показывают результаты математического моделирования [2], вероятность столкновения ИСЗ с ОКМ примерно на 30% больше, чем вероятность столкновения спутников между собой. Поэтому задача активного удаления ОКМ является актуальной для уменьшения риска опасных столкновений.
Для решения этой задачи разрабатываются контактные и бесконтактные способы удаления ОКМ. Контактные способы захвата и удаления ОКМ основаны на использовании контактирующих устройств, таких как роботизированная рука или трос, для прикрепления к ОКМ. Эти способы достаточно сложны в применении ввиду ограниченного числа степеней свободы и малой приспособленности к взаимодействию с вращающимися объектами ОКМ. Например, наибольшая скорость вращения ОКМ, которую может выдержать жесткий захват, составляет всего лишь 4-5 град/с [3]. Бесконтактные способы удаления ОКМ имеют большое преимущество по сравнению с контактными методами, поскольку не требуют решения проблем, связанных с захватом и удержанием вращающегося ОКМ.
Среди бесконтактных способов воздействия на ОКМ известны следующие способы удаления ОКМ из очищаемой области околоземного пространства:
Известен лазерно-оптический способ, основанный на использовании сверхмощных лазеров для разогрева ОКМ и генерирования эмиссии микрочастиц, создающей реактивное воздействие на ОКМ [4, 5, 6, 7]. Данный способ перемещения объектов космического мусора предполагает постепенное использование вещества ОКМ космическим аппаратом, оснащенным лазерной двигательной установкой и устройством, обеспечивающим сканирование поверхности ОКМ произвольной формы [7]. Перемещение ОКМ достигается за счет механического импульса, возникающего при лазерном воздействии на поверхность ОКМ. Однако этот способ пригоден для воздействия лишь на единичный объект, при условии его обнаружения, в то время как наибольшую опасность для космических аппаратов представляют дисперсионные поля малоразмерного космического мусора, обнаружение которых проблематично при имеющемся уровне развития радиолокационных средств.
Известен способ импульсного воздействия ионным пучком, достаточно хорошо описанный в источниках информации [8, 9, 10, 11, 12, 13]. Известен способ бесконтактной транспортировки ОКМ [11] с помощью космического аппарата (КА), снабженного ионной пушкой с изменяемым направлением вектора тяги, предусматривающий воздействие на поверхность транспортируемого ОКМ квазинейтральным ионным пучком с помощью ионной пушки. Однако этот способ имеет высокую чувствительность к угловому движению ОКМ, что вызывает необходимость решать непростую задачу стабилизации углового движения ОКМ при бесконтактной его транспортировке [14]. Другим недостатком этого способа является необходимость производить динамическую компенсацию возмущающих сил и моментов, действующих на КА, а также производить динамическую ориентацию КА относительно транспортируемого ОКМ [11].
Известен способ электростатического отталкивания, основанный на использовании сил кулонова взаимодействия [15, 16, 17].
Известен электромагнитный способ, основанный на использовании магнитного отталкивания для влияния на трансляционное движение ОКМ, и вихревых токов для остановки неконтролируемого вращения ОКМ относительно центра масс [18, 19, 20, 21, 22]. Известен способ электромагнитного захвата намагниченного ОКМ с помощью КА, снабженного индукционной катушкой, шаровой мельницей для превращения ОКМ в пыль, источником расширяющейся пены для захвата немагнитных ОКМ, и солнечным парусом в качестве источника малой силы тяги для последующего перемещения КА [22]. Однако известный способ имеет высокую сложность и энергоемкость. Кроме того, тяга, создаваемая солнечным парусом, очень мала. Поэтому длительное перемещение КА со значительно увеличенной площадью поперечного сечения может даже повысить вероятность столкновения с другими КА или ОКМ.
Существенным общим недостатком вышеупомянутых известных бесконтактных способов удаления ОКМ является отсутствие контроля над траекторией ОКМ после выхода ОКМ из зоны взаимодействия с активным ИСЗ.
Известен способ гравитационного притяжения ОКМ к тяжелому космическому аппарату [23, 24]. Однако известный способ имеет высокую массово-энергетическую емкость, низкую эффективность и отсутствие контроля процесса сбора ОКМ.
Наиболее близким к заявляемым способу и устройству является патент США [19], принятый в качестве прототипа, в котором описаны способ и устройство, содержащее космическую платформу с генераторами магнитного и/или электрического полей для влияния на траекторию ОКМ, находящегося в зоне действия этих полей. В результате такого отклонения траектории, ОКМ покидает зону влияния космической платформы и переходит либо на орбиту, приближающую его к Земле, либо на орбиту, уводящую его в более высокую область, безопасную с точки зрения возможного столкновения с ИСЗ.
Недостатками прототипа являются непредсказуемость и неконтролируемость захвата и дальнейшей траектории ОКМ, что не гарантирует решение задачи удаления ОКМ, а его действие сводится лишь к непредсказуемому изменению траектории ОКМ в пространстве.
Кроме этого, к недостаткам прототипа относится большой расход мощности для создания сильного магнитного и электрического полей, обеспечивающих достижение поставленной цели, что, в целом, снижает эффективность описанных в прототипе способа и устройства, а также существенно ограничивает возможности их использования.
Технической задачей заявленного изобретения является разработка способа и устройства для бесконтактного захвата и активного удаления ОКМ с использованием электродинамической силы для захвата и удержания ОКМ для последующего увода ОКМ из очищаемой области околоземного пространства, что в целом позволит обеспечить значительное повышение безопасности полетов ИСЗ.
Техническим результатом заявленных способа и устройства является обеспечение возможности захвата и удержания электропроводящего ОКМ (в том числе, одновременно нескольких разнокалиберных ОКМ, включая самые малые по размеру), а также контролируемый увод захваченных ОКМ из очищаемой области околоземного пространства на орбиту захоронения, и последующий возврат устройства на рабочую орбиту для продолжения миссии.
Указанный технический результат достигается тем, что в известном способе для электромагнитной уборки электропроводящего космического мусора в околоземном пространстве, заключающемся в одновременном захвате нескольких разнокалиберных объектов космического мусора (ОКМ), в соответствии с заявленным изобретением, на орбиту сбора ОКМ выводят космический аппарат (КА), в котором открывают створчатые двери КА, подают электрический ток в тороидальную обмотку КА, захватывают и накапливают магнитно-восприимчивые ОКМ бесконтактным способом, контролируют суммарную массу захваченных ОКМ с помощью катушек индуктивности, так, что после достижения суммарной массой ОКМ заранее установленного значения, заложенного в систему управления КА, дальнейший захват ОКМ прекращают путем закрытия створчатых дверей КА и прекращения подачи тока в тороидальную обмотку, КА вместе с захваченными ОКМ приводят в управляемое движение электрическими двигателями малой тяги для маневра и перехода на целевую орбиту, при достижении которой маршевые реактивные двигатели КА отключают, ОКМ освобождают от захвата путем открытия створчатых дверей, после чего включают реактивные двигатели КА и осуществляют перелет КА на орбиту сбора ОКМ, при достижении которой маршевые реактивные двигатели КА отключают, а устройство для сбора ОКМ приводят в рабочее состояние подачей электрического тока в тороидальную обмотку КА, после чего проводят повторные циклы сбора и удаления ОКМ.
Кроме того, указанный технический результат достигается тем, что в известном устройстве для реализации способа электромагнитной уборки электропроводящего космического мусора в околоземном пространстве, выполненном в виде космического аппарата (КА), имеющего форму тора, содержащего многовитковую катушку с током, солнечные элементы, створчатые двери и реактивные двигатели, в соответствии с заявленным изобретением, КА имеет форму тора, центральная часть которого выполнена пустотелой и имеет форму цилиндра для сбора, удержания и накопления ОКМ, на внешней стороне тора размещены панели солнечных батарей, внутри КА размещены многовитковая электрическая катушка и электрическая система контроля заполнения пространства магнитновосприимчивым веществом, в торцевых частях КА расположены створчатые двери, связанные электрическим приводом с системой контроля заполнения пространства, а реактивные двигатели расположены на внешней стороне КА вблизи его торцов.
Сущность заявленного изобретения поясняется Фиг. 1 - Фиг. 9.
На Фиг. 1 представлена схема устройства для бесконтактного захвата и удержания одного и более электропроводящих объектов космического мусора (ОКМ) в околоземном пространстве.
На Фиг. 2 представлены этапы его работы, а также варианты взаимного расположения КА и ОКМ.
На Фиг. 3 представлены этапы процесса по удалению ОКМ в рамках заявленного способа.
На Фиг. 4 представлена иллюстрация к реализации заявленного способа на основе вычисления главного вектора сил Лоренца, действующих на ОКМ.
На Фиг. 5-9 представлены результаты численного моделирования процесса увода ОКМ на целевую орбиту.
На Фиг. 1 заявленное устройство для реализации способа электромагнитной уборки электропроводящего космического мусора в околоземном пространстве выполнено в виде космического аппарата (КА), имеющего форму торообразного корпуса (1), содержащего многовитковую катушку (2) с током и покрытого панелями солнечных элементов (3) и (4); (5) и (6) - это створчатые двери КА; а (7, 8, 9, 10, 11, 12) - это электрические двигатели малой тяги.
Работа устройства в соответствии с заявленным способом поясняется Фиг. 2, на которой представлен КА (13). В качестве примера на Фиг. 2 работа устройства иллюстрируется с движущимся облаком ОКМ (14) по низкой околоземной орбите (НОО) по траектории (15). Изначально КА (13) движется по орбите с высотой, минимально отличающейся от высоты облака ОКМ. Для захвата ОКМ, обнаруженного системой детектирования ОКМ, расположенной на КА, активируются электрические двигатели КА, так что расстояние между КА и облаком ОКМ уменьшается. Эта фаза полета КА на Фиг. 2 имеет обозначение 'А'. На следующей фазе полета, обозначенной как 'В', по сигналу системы детектирования ОКМ включается ток, протекающий по электрической катушке (17), для создания индуцирующего магнитного поля, и створчатые двери (20) открываются для приема ОКМ. Во время фазы 'В' возникает сила Лоренца, действующая на центр масс облака ОКМ (18) в направлении, определяемом законом индукции Фарадея и законом Ленца. Сила Лоренца помогает захватить облако ОКМ с уменьшением его относительной скорости. Фаза захвата ОКМ обозначена буквой 'С'. К концу фазы 'С' ОКМ надежно захвачены и удерживаются вблизи центральной зоны КА (19). По сигналу системы индикации наполнения КА створчатые двери (21) закрываются, чем завершается выполнение операции захвата ОКМ. По сигналу системы «открытия-закрытия» створчатых дверей начинает работать программа управления КА для переноса ОКМ в плотные слои атмосферы по траектории (16).
Миссия по активному удалению конкретного целевого ОКМ, в соответствии с предложенным способом, разделена на пять основных этапов, как это иллюстрировано на Фиг. 3. На первом этапе КА (22) перемещается в точку на орбите перехвата (30) радиуса Rd на произвольном расстоянии перехвата δ0 от целевого ОКМ (23). Второй этап (24) начинается с активации маршевых реактивных двигателей для сближения с целевым ОКМ. На Фиг. 3 данный этап иллюстрируется вариантом удаления ОКМ на более низкую орбиту. Поэтому сила тяги Р двигателей направлена вдоль траектории, что позволяет уменьшить большую полуось орбиты КА. На третьем этапе электрическая катушка КА приведена в действие, чтобы генерировать индуцированное магнитное поле в процессе сближения КА с целевым ОКМ. В конце третьего этапа целевой ОКМ захватывается (25) с помощью силы Лоренца, которая действует в направлении, противоположном относительной скорости ОКМ. После этого по сигналу индикатора наполнения створчатые двери закрываются (26), а электрическая катушка выключается. Четвертый этап продолжается удержанием и переносом ОКМ с малой тягой по спиральной траектории (31), которая заканчивается в точке на низкой околоземной орбите (32) радиуса Rc. Пятый этап (27) обозначает окончание маневра перехода КА на низкую околоземную орбиту, когда створчатые двери открываются для разгрузки мусора (28) на орбите входа в земную атмосферу (33). После этого КА готов к следующей миссии по удалению ОКМ.
В случае полуактивного варианта использования заявленного способа конкретный целевой ОКМ не выбирается, а сбор ОКМ производится на начальной орбите с радиусом Rd. Поэтому первый и второй этапы в этом случае отсутствуют, а миссия по сбору, удержанию и уводу собранных ОКМ на орбиту сброса мусора начинается сразу с третьего этапа.
Технический результат, достигаемый заявляемым изобретением, состоит в повышении эффективности бесконтактного способа сбора разнокалиберных ОКМ и контролируемого их удаления из очищаемой области околоземного пространства путем перевода на целевую орбиту захоронения с последующим возвратом устройства на рабочую орбиту для продолжения миссии.
Указанный технический результат достигается тем, что космический аппарат, коллектор для уборки ОКМ, имеет форму тора (Фиг. 1), центральная часть которого (1) на Фиг. 1 выполнена пустотелой и имеет форму цилиндра для сбора, удержания и накопления ОКМ, на внешней стороне тора размещены панели солнечных батарей (3), (4) (Фиг. 1), внутри тора размещены многовитковая электрическая катушка (2) и электрическая система контроля заполнения пространства магнитновосприимчивым веществом, в торцевых частях КА расположены створчатые двери (5) и (6) (Фиг. 1), связанные электрическим приводом с системой контроля заполнения пространства, а реактивные двигатели (7-12) (Фиг. 1) расположены на внешней стороне КА вблизи его торцов. С помощью размещенных на внешней стороне коллектора источников электроэнергии (3), (4) (Фиг. 1) и многовитковой электрической катушки (2) (Фиг. 1) генерируется индуцированное магнитное поле для сбора магнитновосприимчивых ОКМ. В соответствии с законом индукции Фарадея и законом Ленца, возбуждается сила Лоренца, действующая на магнитновосприимчивый ОКМ, движущийся через неоднородное магнитное поле КА. В результате воздействия силы Лоренца магнитновосприимчивый ОКМ оказывается захвачен магнитным полем катушки с током. При этом не требуется решать известную при уборке космического мусора задачу предварительного погашения угловой скорости ОКМ, поскольку наличие угловой скорости ОКМ не препятствует захвату ОКМ магнитным полем КА. Более того, вихревые токи Фуко, возникающие внутри вращающегося проводящего ОКМ, способствуют погашению угловой скорости ОКМ в магнитном поле КА.
По мере захвата новых ОКМ пространство внутри КА постепенно заполняется магнитновосприимчивым веществом, суммарный объем которого контролируется электрическим контуром КА. После достижения суммарной массой ОКМ установленного значения, заложенного в систему управления КА, срабатывают индикаторы наполнения, передающие на торцевые части (5) и (6) (Фиг. 1) управляющий сигнал для срабатывания механизмов закрытия створчатых дверей КА.
После этого источники питания КА прекращают подачу тока в тороидальную обмотку и, тем самым, перестают генерировать магнитное поле, а сам КА вместе с захваченным объемом ОКМ приводится в движение реактивными двигателями 7-12 с целью маневра перехода на целевую орбиту. При достижении целевой орбиты маршевые реактивные двигатели КА отключаются, а створчатые двери КА открываются. Затем включаются реактивные двигатели КА и осуществляется программа перелета КА на орбиту сбора ОКМ. При достижении КА орбиты сбора ОКМ маршевые реактивные двигатели КА отключаются, а бортовые источники энергии генерируют индуцированное магнитное поле в катушке, начиная новый цикл сбора и удаления ОКМ. Для выполнения длительных миссий по удалению ОКМ целесообразно использовать на КА двигатели малой тяги, такие как электрические ионные двигатели, способные генерировать усилие тяги не менее 0,001 мН при КПД 60-80% [25].
Работоспособность заявленного устройства обеспечивается источниками электроэнергии, преобразованной из световой с помощью солнечных батарей, входящих в состав КА. Источники электроэнергии обеспечивают питание основной катушки с током для генерирования индуцированного магнитного поля, а также работу системы управления КА.
Сущность заявленного изобретения заключается в следующем. В процессе движения проводящего ОКМ через магнитное поле, внутри ОКМ индуцируется магнитное поле в соответствии с законом Ленца. Индуцированное магнитное поле генерирует вихревые токи, протекающие в замкнутых контурах с направлением, определяемым направлением магнитного поля, действующего на ОКМ, и движением самого ОКМ. Кроме того, если ОКМ движется в неоднородном магнитном поле, на ОКМ воздействует сила Лоренца, что иллюстрируется приведенным ниже теоретическим пояснением.
Покажем, что эффект воздействия силы Лоренца проявляется в изменении траектории ОКМ, а при надлежащем подборе параметров также и в захвате ОКМ магнитным полем КА наподобие известных природных явлений захвата частиц межпланетной плазмы магнитным полем Земли. Рассмотрим эти явления подробнее и вычислим главный вектор FL сил Лоренца, действующих на шарообразный ОКМ в магнитном поле КА. Общее выражение для силы Лоренца, действующей на заряд q, движущийся со скоростью ν относительно электрического поля E и магнитного поля с магнитной индукцией В определяется выражением
FL=q(E+ν × В),
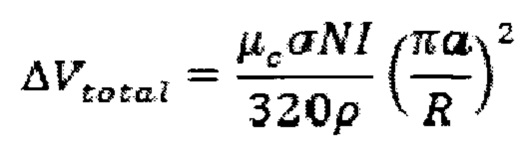
ОКМ моделируется шарообразным телом с радиусом α, движущимся со скоростью V в неоднородном магнитном поле с магнитной индукцией В(у,х), как показано на Фиг. 4. Введем систему координат Oxyz с началом в центре шара. Вихревые токи (34) формируются вокруг характерной цилиндрической поверхности, образующая которой параллельна вектору магнитной индукции В как показано на Фиг. 4.
Скорость ОКМ направлена вдоль отрицательного направления у, а вектор магнитного поля в направлении, показанном на Фиг. 4. Вектор магнитного поля В можно разделить на две составляющие: поперечная составляющая By и вертикальная составляющая Вх. Закон Ампера подразумевает, что магнитное поле соленоидально для R«1 м (где R - радиус катушки), поэтому можно предположить, что распределение магнитного поля плоское [26]. Направление вектора плотности электрического тока  определяется по закону Ленца. Сила Лоренца FL всегда действует в направлении, перпендикулярном характеристической поверхности.
определяется по закону Ленца. Сила Лоренца FL всегда действует в направлении, перпендикулярном характеристической поверхности.
Проекции главного вектора сил Лоренца, действующих на проводящий шар, выражаются как [27]:
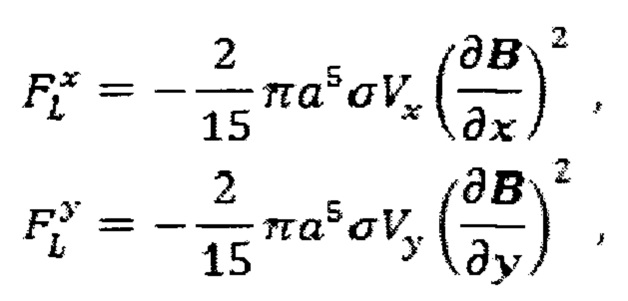
Анализ математической модели движения шарового ОКМ позволяет получить условия, при которых достигается режим захвата ОКМ магнитным полем КА. Установлено, что режим захвата ОКМ магнитным полем КА достигается при V0<ΔVtotal, где  - начальная скорость ОКМ перед входом в магнитное поле, a ΔVtotal - полное изменение скорости сферы, движущейся через область поля. Величину ΔVtotal можно выразить как [27]
- начальная скорость ОКМ перед входом в магнитное поле, a ΔVtotal - полное изменение скорости сферы, движущейся через область поля. Величину ΔVtotal можно выразить как [27]
где δ0 - начальное расстояние ОКМ от КА, Р - Сила тяги, md - масса ОКМ, μс - константа проницаемости, N - количество витков катушки, ρ - плотность ОКМ, σ - электропроводность ОКМ, α - радиус ОКМ, R - радиус катушки.
Дополнительно можно утверждать, что захват происходит в тот момент, когда относительное расстояние ОКМ от геометрического центра электромагнитной катушки меньше радиуса катушки. Конкретные числовые условия выбора параметров системы, при которых обеспечивается захват ОКМ, приведены ниже в примерах 1 и 2.
Заявленное изобретение апробировано компьютерным моделированием на базе математико-механического факультета заявителя - Санкт-Петербургского государственного университета. Примеры апробации приведены ниже.
Пример 1. Вначале был выполнен численный анализ неравенства V0<ΔVtotal для относительной скорости ОКМ. Например, пусть катушка КА содержит 1000 витков и имеет радиус 1.5 м, а протекающий по ней ток I=5 А. Пусть ОКМ имеет форму сферической оболочки с диаметром 2 м и с толщиной стенки 4 см, электропроводимость - 4⋅106 Сименс/м. и плотность - 1500 кг/м3. Сила тяги КА составляет 2⋅10-2 Н, а начальное расстояние ОКМ - 10 м. Тогда неравенство (V0=0,0081)<(ΔVtotal=0,2281) выполнено. Пример подтверждает выполнимость неравенства V0<ΔVtotal для обширного множества в пространстве параметров КА.
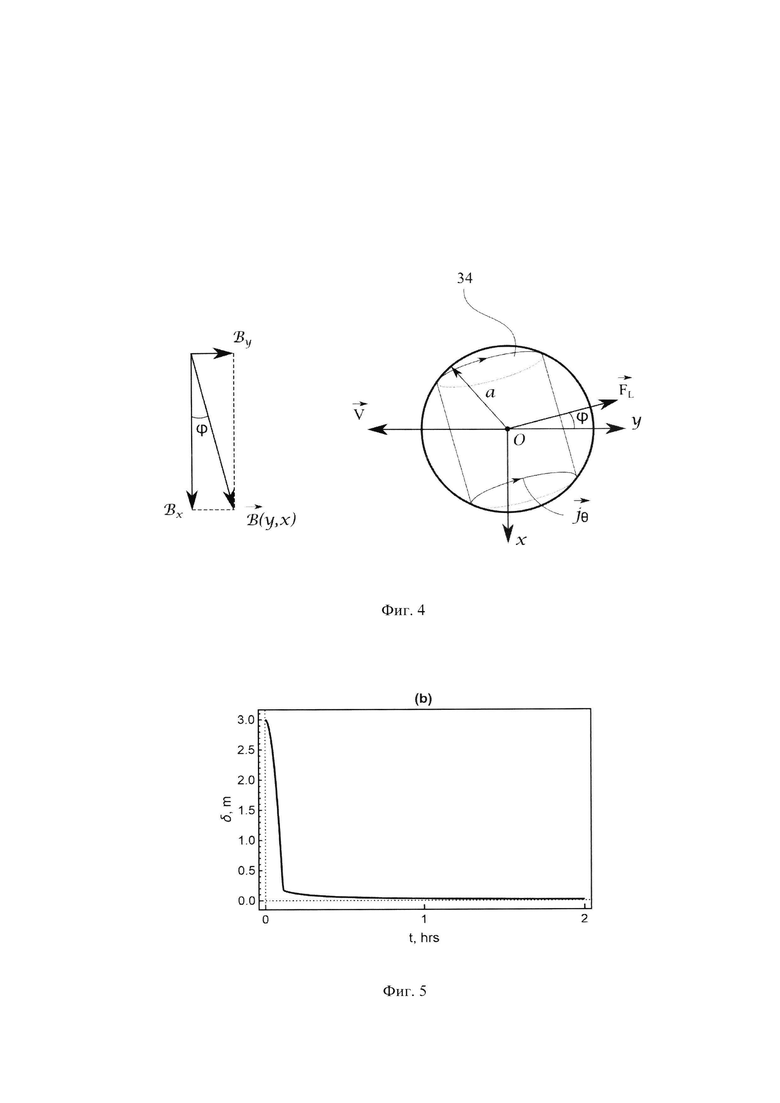
Пример 2. Выполнена серия численных экспериментов, моделирующих процесс увода ОКМ на орбиту захоронения. Для иллюстрации численного моделирования процесса увода ОКМ выбран пример, в котором ОКМ имеет форму сферической оболочки с диаметром 1 м, электропроводимость - 4⋅106 Сименс/м, и плотность - 1500 кг/м3. Пусть ОКМ движется по круговой НОО с нулевым наклонением на высоте 400 км над уровнем моря. Катушка КА содержит 1000 витков и имеет радиус 1.5 м. Сила тяги КА составляет 0.15 Н, а начальное расстояние ОКМ - 3 м, начальное угловое смещение относительно касательной к траектории - -0,2 рад. Величина электрического тока в катушке составляет 20 А. Цель миссии - снизить высоту ОКМ на 200 км, чтобы он мог войти в атмосферу Земли и затем безопасно распасться.
Фиг. 5-6 иллюстрируют движение ОКМ относительно центра масс КА в течение первых двух часов, начиная с начального расстояния 10 м и угла -0,2 рад.
На Фиг. 5 показано изменение относительного расстояния S в процессе увода ОКМ.
На Фиг. 6 показано изменение относительного угла α в процессе увода ОКМ.
Фиг. 7 иллюстрирует траекторию ОКМ на фоне магнитного поля, генерируемого электрической катушкой, установленной на КА.
Фиг. 8 иллюстрируют изменение большой полуоси h в процессе увода ОКМ от НОО до верхних слоев атмосферы Земли.
Фиг. 9 иллюстрируют изменение эксцентриситета в ОКМ в процессе увода ОКМ от НОО до верхних слоев атмосферы Земли.
Анализ Фиг. 5-7 показывает, что ОКМ эффективно захватывается и удерживается около центра электрической катушки до конца миссии. В то же время орбита ОКМ остается квазикруговой, как показано на Фиг. 9. Цель миссии достигнута, поскольку большая полуось орбиты ОКМ линейно уменьшается во время перехода, а затем ОКМ выбрасывается в верхние слои атмосферы Земли.
Как показали приведенные выше примеры, компьютерное моделирование орбитальной динамики КА и ОКМ, аналитические исследования и численные эксперименты, заявленный способ и устройство могут работать при современном уровне развития техники, а их использование повышает технико-экономическую эффективность системы удаления ОКМ по сравнению с прототипом [19]. Заявленное устройство, как показал пример 2, позволяет обеспечить активный бесконтактный захват электропроводящего ОКМ в околоземном пространстве с помощью сил Лоренца за счет эффективно реализованной возможности применения закона электромагнитной индукции Фарадея и закона Ленца. Важным его преимуществом по сравнению с аналогами является возможность захвата одновременно нескольких разнокалиберных ОКМ, включая малые по размеру, без предварительного решения задачи погашения угловой скорости ОКМ. Удержание ОКМ и его контролируемый увод на целевую орбиту с последующим возвращением к новому циклу сбора и увода ОКМ являются преимуществами предложенного способа, выгодно отличающими его от аналогов.
Список использованной литературы:
1. https://orbitaldebris.jsc.nasa.gov/
2. Horstmann, A., Kebschull, С. Müller, S., Gamper, Е., Hesselbach, S., Soggeberg, К., Ben Larbi, M.K., Becker, M., Lorenz, J., Wiedemann, C., Stoll, E., 2018. Survey of the Current Activities in the Field of Modeling the Space Debris Environment at TU Braunschweig. Aerospace 5, 37.
3. Castronuovo M.M. Active space debris removal - a preliminary mission analysis and design, Acta Astronautica. - 2011. - Vol. 69. - №9. - P. 848-859.
4. C. Phipps, et al., Orion: clearing near-earth space debris using a 20-kW, 530-nm, earth-based, repetitively pulsed laser, Laser Part. Beams 14 (01) (1996) 1-44.
5. D. Liedahl, et al., Pulsed laser interactions with space debris: target shape effects, Adv. Space Res. 52 (5) (2013) 895-915.
6. C.R. Phipps, A laser-optical system to re-enter or lower low earth orbit space debris, Acta Astronaut. 93 (2014) 418-429.
7. Локтионов Е.Ю., Майорова В.И., Телех В.Д. Патент RU 2679938 Способ перемещения объектов космического мусора с постепенным использованием его вещества космическим аппаратом, оснащенным лазерной двигательной установкой. Заявка: 2017145797, 26.12.2017
8. С. Bombardelli, J. Pelaez, Ion beam shepherd for contactless space debris removal, J. Guid. Control Dyn. 34 (3) (2011) 916-920.
9. M. Merino, et al., Space Debris Removal with An Ion Beam Shepherd Satellite: Target-Plasma Interaction, in: 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, San Diego, С A, USA, 2011.
10. S. Kitamura, Y. Hayakawa, S. Kawamoto, A reorbiter for large geo debris objects using ion beam irradiation, Acta Astronaut. 94 (2) (2014) 725-735.
11. Обухов B.A., Петухов В.Г., Покрышкин А.И., Попов Г.А. Патент RU 2568960 Способ бесконтактной транспортировки космических объектов. Заявка: 2014134548/11, 25.08.2014
12. К. Vereen, R. Winglee, J. Correy, H. Martin An Active Debris Removal Mission using a Plasma Phased Array Architecture. AIAA SPACE Forum 17-19 September 2018, Orlando, FL 2018 AIAA SPACE and Astronautics Forum and Exposition.
13. Яковлев M.B. и др. Патент RU 2720606 Способ управления сервисным космическим аппаратом при бесконтактном удалении фрагментов космического мусора. Заявка: 2019135700, 07.11.2019.
14. Яковлев М.В. и др. Патент RU 2684022 Способ стабилизации углового движения некооперируемого объекта при бесконтактной транспортировке. Заявка: 2018113163, 11.04.2018.
15. N. Murdoch, et al., Electrostatic tractor for near earth object deflection, in: 59th International Astronautical Congress, vol. 29, Glasgow, Scotland, 2008.
16. V.S. Aslanov, V.V. Yudintsev Motion control of space tug during debris removal by a Coulomb force. Journal of Guidance, Control and Dynamics, 2018, 41(7), pp. 1476-1484.
17. V.S. Aslanov, H. Schaub Prospects of touchless space debris detumbling using an electrostatic pusher configuration. Proceedings of the International Astronautical Congress, IAC 2018 - October.
18. Voirin Т., Kowaltschek S., Dubois-Matra O. NoMAD: A contactless technique for active large debris removal. Proceedings of the International Astronautical Congress, IACVolume 4, 2012, Pages 2859-287263rd International Astronautical Congress 2012, IAC 2012; Naples; Italy; 1 October 2012 до 5 October 2012.
19. Patent US 2012/0085869 (P. Lloyd, M. Keynes Al). Apparatus, method and system for removing orbital debris. April 12, 2012. - прототип.
20. Ortiz Gómez, N., Walker, S.J.I., Eddy currents applied to de-tumbling of space debris: Analysis and validation of approximate proposed methods. Acta Astronautica 114, 2015, 34-53.
21. Гришкевич И.О., Колычев А.В., Керножицкий В.А. Патент на полезную модель RU 177015 U1, 06.02.2018 Беспилотный космический аппарат для очистки околоземного пространства от космического мусора. Заявка: 2017104797 от 14.02.2017.
22. Feng D. et al. Patent CN 108177801 Space debris cleaning device and method based on solar sail. Application number 2017CN-1187854, Date 2017-11-24.
23. E.T. Lu, S.G. Love, Gravitational tractor for towing asteroids, Nature 438 (7065) (2005) 177-178.
24. V.S. Aslanov. Debris removal in GEO by heavy orbital collector. Acta Astronautica 2019. 164, 184-191.
25. Choueiri, E.Y., 2009. New Dawn for Electric Rockets. Sci Am 300, 58-65.
26. Griffiths D.J., Introduction to electrodynamics, Fourth edition (Boston: Pearson), 2013.
27. J. Walker and W.M. Wells, Drag force on a conductive spherical drop in a nonuniform magnetic field, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Космический аппарат для очистки околоземного космического пространства от космического мусора | 2022 |
|
RU2784740C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2019 |
|
RU2703056C1 |
| Способ определения последовательности перелётов между объектами космического мусора в окрестности геостационарной орбиты | 2020 |
|
RU2759026C1 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| Способ обнаружения объектов космического мусора и наведения на них космического аппарата с использованием лазерного сканирования пространства | 2023 |
|
RU2813696C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА ОСТАТОЧНЫМ АЭРОДИНАМИЧЕСКИМ ДЕЙСТВИЕМ АТМОСФЕРЫ ЗЕМЛИ | 2021 |
|
RU2773991C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССА УДАЛЕНИЯ КОСМИЧЕСКОГО МУСОРА | 2018 |
|
RU2689088C1 |
| СИСТЕМА ДЛЯ ОЧИСТКИ КОСМИЧЕСКОГО ПРОСТРАНСТВА ОТ ОБЪЕКТОВ КОСМИЧЕСКОГО МУСОРА | 2018 |
|
RU2704645C1 |
| Способ определения последовательности перелётов между объектами космического мусора при значительном отличии в долготе восходящего узла их орбит | 2018 |
|
RU2688120C1 |





Группа изобретений относится к методам и средствам удаления из околоземного пространства объектов космического мусора (ОКМ). Магнитно-восприимчивые (в том числе электропроводные) ОКМ захватывают магнитным полем тороидальной обмотки космического аппарата (КА) и накапливают в цилиндрическом центральном объеме КА, снабженном створками. Заполнение этого объема ОКМ контролируется катушками индуктивности. По его заполнении створки закрывают и переводят КА с помощью электрических реактивных двигателей на орбиту сбора (захоронения) ОКМ, где створки открывают для выгрузки ОКМ. Затем КА выполняет маневр перехода на орбиту сбора новых ОКМ. Технический результат состоит в обеспечении контролируемого увода захваченных ОКМ из очищаемой области околоземного пространства. 2 н.п. ф-лы, 9 ил.
1. Способ электромагнитной уборки электропроводящего космического мусора в околоземном пространстве, заключающийся в одновременном захвате нескольких разнокалиберных объектов космического мусора, отличающийся тем, что на орбиту сбора объектов космического мусора выводят космический аппарат, открывают створчатые двери космического аппарата, подают электрический ток в тороидальную обмотку космического аппарата, захватывают и накапливают магнитно-восприимчивые объекты космического мусора бесконтактным способом, контролируют суммарную массу захваченных объектов космического мусора с помощью катушек индуктивности так, что после достижения суммарной массой объектов космического мусора заранее установленного значения, заложенного в систему управления космического аппарата, дальнейший захват объектов космического мусора прекращают путем закрытия створчатых дверей космического аппарата и прекращения подачи тока в тороидальную обмотку, космический аппарат вместе с захваченными объектами космического мусора приводят в управляемое движение маршевыми электрическими реактивными двигателями малой тяги для маневра перехода на целевую орбиту, при достижении которой маршевые реактивные двигатели космического аппарата отключают, объекты космического мусора освобождают от захвата путем открытия створчатых дверей, после чего включают маршевые реактивные двигатели космического аппарата и осуществляют его перелет на орбиту сбора объектов космического мусора, при достижении которой маршевые реактивные двигатели отключают, а устройство для сбора объектов космического мусора приводят в рабочее состояние подачей электрического тока в тороидальную обмотку космического аппарата, после чего проводят повторные циклы сбора и удаления объектов космического мусора.
2. Устройство для бесконтактного захвата и удержания одного и более электропроводящих объектов космического мусора в околоземном пространстве, выполненное в виде космического аппарата, имеющего форму тора, содержащего многовитковую катушку с током, солнечные элементы, створчатые двери и реактивные двигатели, отличающееся тем, что космический аппарат имеет форму тора, центральная часть которого выполнена пустотелой и имеет форму цилиндра для сбора, удержания и накопления объектов космического мусора, на внешней стороне тора размещены панели солнечных батарей, внутри космического аппарата размещены многовитковая электрическая катушка и электрическая система контроля заполнения пространства магнитно-восприимчивым веществом, в торцевых частях космического аппарата расположены створчатые двери, связанные электрическим приводом с системой контроля заполнения пространства, при этом на внешней стороне космического аппарата вблизи его торцов расположены реактивные двигатели.
| US 20120085869 A1, 12.04.2012 | |||
| CN 108177801 A, 19.06.2018 | |||
| СПОСОБ ПОЛУЧЕНИЯ СМАЗКИ ДЛЯ ПРОКАТКИ МЕТАЛЛОВ | 0 |
|
SU177015A1 |
| US 6994296 B2, 07.02.2006 | |||
| Космический аппарат для утилизации космического мусора | 2018 |
|
RU2686415C1 |

