Изобретение относится к области общего машиностроения, а именно - к пневматическим приводам управления исполнительными механизмами преимущественно в транспортных средствах.
Известен пневматический привод системы управления исполнительными механизмами, включающей в себя: пневмомагистраль с источником давления воздуха, с датчиком давления воздуха; два двухпозиционных пневмоклапана с электромагнитным управлением положением поршней и два двухпозиционных пневмоклапана с электромагнитным управлением положением фиксаторов диска; электронный блок управления электромагнитами, выполненный с возможностью получения сигналов от датчика положения поршня и датчика давления воздуха в пневмомагистрали, при этом пневматический привод содержит пневмоцилиндр с торцевыми крышками, при этом внутри пневмоцилиндра установлена плунжерная каретка, состоящая из двух поршней, разнесенных на расстояние, равное длине, объединяющего их пустотелого корпуса с надпоршневыми полостями, имеющего продольную герметичную полость, сквозь которую поперечно пропущен установленный на опорах в пневмоцилиндре вал с зубчатым колесом в средней его части, сцепленным с зубьями продольно горизонтально расположенной рейки, разъемно прикрепленной к указанным поршням, привод исполнительного механизма, соединенный с выступающим из корпуса концом выходного вала, при этом на выходном конце указанного вала, выступающего из пневмоцилиндра, установлен жестко связанный с ним ступицей диск фиксированных положений выходного вала, выполненный с открытыми поперечными периферийными впадинами, количество которых равно заданному числу угловых положений выходного вала, связанного с датчиком его угловых положений, при этом пневмоцилиндр снабжен кронштейном, многопозиционным командоаппаратом, соединенным с выходным валом, блоком фиксации, диска положений выходного вала, включающим в себя фиксатор диска положений выходного вала и ограничитель-ретардер поворота диска положений, каждый из которых выполнен в виде пневмоцилиндра одностороннего действия с проходным штоком, на котором подвижно размещен поршень-упор, сопряженный одной стороной с возвратной пружиной и образующий с другой стороны основную полость, соединенную с соответствующим пневмоклапаном, при этом шток имеет с одного конца зауженную форму с возможностью взаимодействия с указанными ограничительными боковыми поверхностями впадин на диске, а с другого конца - соединенный с ним муфтой захватный элемент ручного перемещения штока, выполненном с возможностью фиксированной остановки в границах заданного сектора средством ограничения поворота (патент RU2718382, F15B 9/03 (2006.01), Опубликовано: 02.04.2020 Бюл. № 10).
Недостатками известного технического решения являются недостаточная надежность и ударное переключение позиций диска положений выходного вала пневмопривода.
Технический результат использования изобретения заключается в повышении надежности фиксации и безударности переключения позиций диска положений выходного вала пневмопривода системы управления исполнительными механизмами.
Ниже раскрыты все общие и частные существенные признаки изобретения, характеризующие их причинно-следственную связь с указанным техническим результатом, достаточные для осуществления специалистом в данной области техники.
Пневматический привод системы управления исполнительными механизмами, включающей в себя: пневмомагистраль с источником давления воздуха, с датчиком давления воздуха; два двухпозиционных пневмоклапана с электромагнитным управлением положением поршней и два двухпозиционных пневмоклапана с электромагнитным управлением положением фиксаторов и диска положений; электронный блок управления ЭБУ электромагнитами, выполненный с возможностью получения сигналов от датчика положения поршня и датчика давления воздуха в пневмомагистрали. Пневматический привод содержит пневмоцилиндр с торцевыми крышками. Внутри пневмоцилиндра, установлена плунжерная каретка, состоящая из двух поршней, разнесенных на расстояние, равное длине, объединяющего их пустотелого корпуса, с надпоршневыми полостями, имеющего продольную герметичную полость, сквозь которую поперечно пропущен установленный на опорах в пневмоцилиндре вал с зубчатым колесом в средней его части, сцепленным с зубьями продольно горизонтально расположенной рейки, разъемно прикрепленной к указанным поршням, привод исполнительного механизма, соединенный с выступающим из корпуса концом выходного вала. На выходном конце указанного вала, выступающего из пневмоцилиндра, установлен жестко связанный с ним ступицей диск фиксированных положений выходного вала. Диск положений выполнен с открытыми поперечными периферийными впадинами, количество которых равно заданному числу угловых положений выходного вала, связанного с датчиком его угловых положений. Пневмоцилиндр снабжен кронштейном, многопозиционным командоаппаратом, соединенным с выходным валом, блоком фиксации диска положений выходного вала, включающим в себя фиксатор диска положений выходного вала и ограничитель-ретардер поворота диска положений, каждый из которых выполнен в виде пневмоцилиндра одностороннего действия с проходным штоком. На штоке каждого из двух двухпозиционных пневмоклапанов подвижно размещен поршень-упор, сопряженный одной стороной с возвратной пружиной и образующий с другой стороны основную полость, соединенную с соответствующим пневмоклапаном. Шток имеет с одного конца зауженную форму с возможностью взаимодействия с указанными ограничительными боковыми поверхностями впадин на диске, а с другого конца - соединенный с ним муфтой захватный элемент ручного перемещения штока. Диск положений выполнен с возможностью фиксированной остановки в границах заданного сектора средством ограничения поворота. Диск положений выходного вала выполнен в виде единой детали со ступицей, ориентированной внутрь каретки и, несущей подшипники выходного вала. Указанные боковые поверхности впадин на диске положений выполнены криволинейными, выпуклыми, сопряженными с дном впадины посредством уширения, выполненного по отношению к боковой поверхности с возможностью свободного перемещения концов штоков фиксатора диска положений и ограничителя-ретардера поворота диска положений в процессе их контакта с боковой поверхностью впадин. Упомянутое средство ограничения поворота диска устанавливает границы заданного сектора в виде концевых плоских лысок, выполненных на ориентированных друг к другу ограничительных боковых поверхностях двух сопряженных впадин сектора, причем габаритный диаметр выступа между ними меньше наружного диаметра остальных выступов диска на величину указанной плоской лыски, выполненной с возможностью контакта с цилиндрической проточкой, выполненной на штоке ограничителя-ретардера поворота диска положений. Поршни каретки выполнены составными из ступенчатой опорной части, внутренняя ступень которой размещена в полости корпуса каретки. На наружной ступени между ее бортом и разъемно соединенной с ней герметизирующей частью установлен кольцевой магнит, охваченный опорной направляющей лентой. В крышках пневмоцилиндра установлены резьбовые ограничители хода поршней. Фиксатор диска положений может быть снабжен средством блокировки штока, которое включено в систему управления посредством снабжения ее дополнительным пневмоклапаном, связанным со вспомогательной полостью, которая выполнена в штоковой полости фиксатора диска. В качестве датчика угловых положений диска использован линейный датчик положения поршней каретки, подключенный к электронному блоку управления ЭБУ с возможностью пересчета на угловые показатели положений диска положений. Указанные криволинейные боковины выступов между углублениями в диске положений могут быть выполнены в виде эвольвенты окружности. С наружной стороны подвижного поршня-упора в полости пружины фиксатора диска положений образована дополнительная полость, связанная посредством штуцера с напорной магистралью дополнительного двухпозиционного пневмоклапана с электромагнитным управлением фиксатором диска положений с возможностью блокирующего поджатия заостренного конца запорной части штока в противолежащую впадину в диске положений выходного вала.
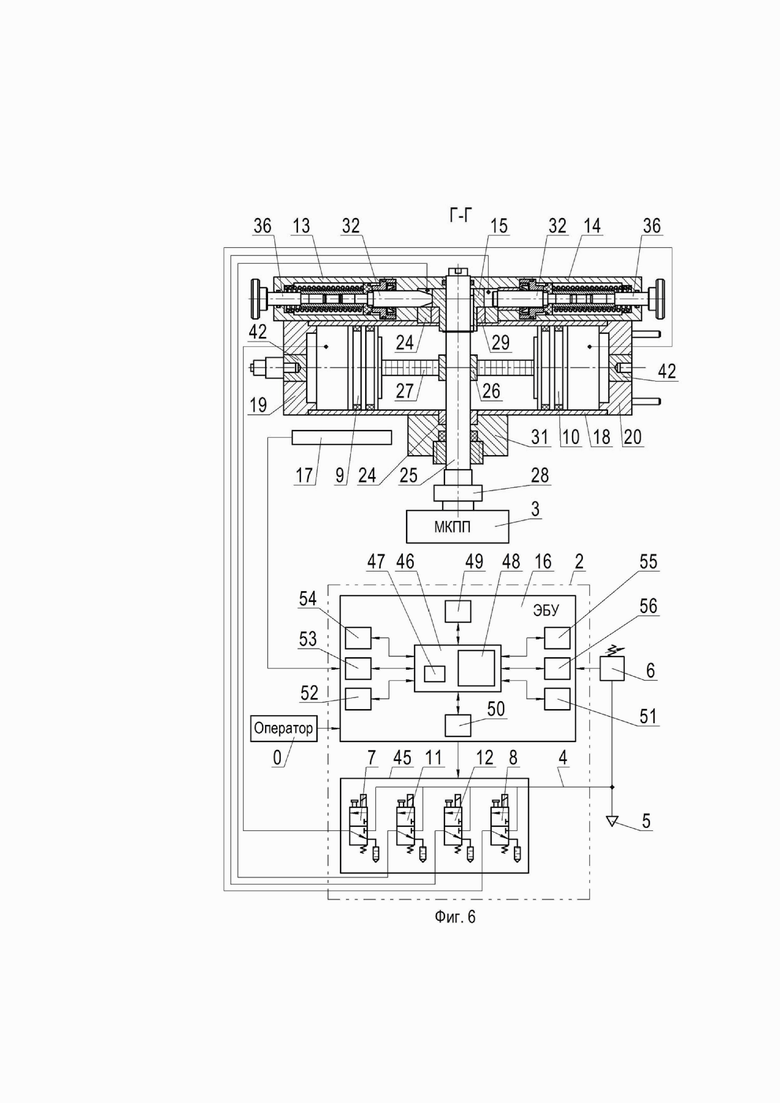
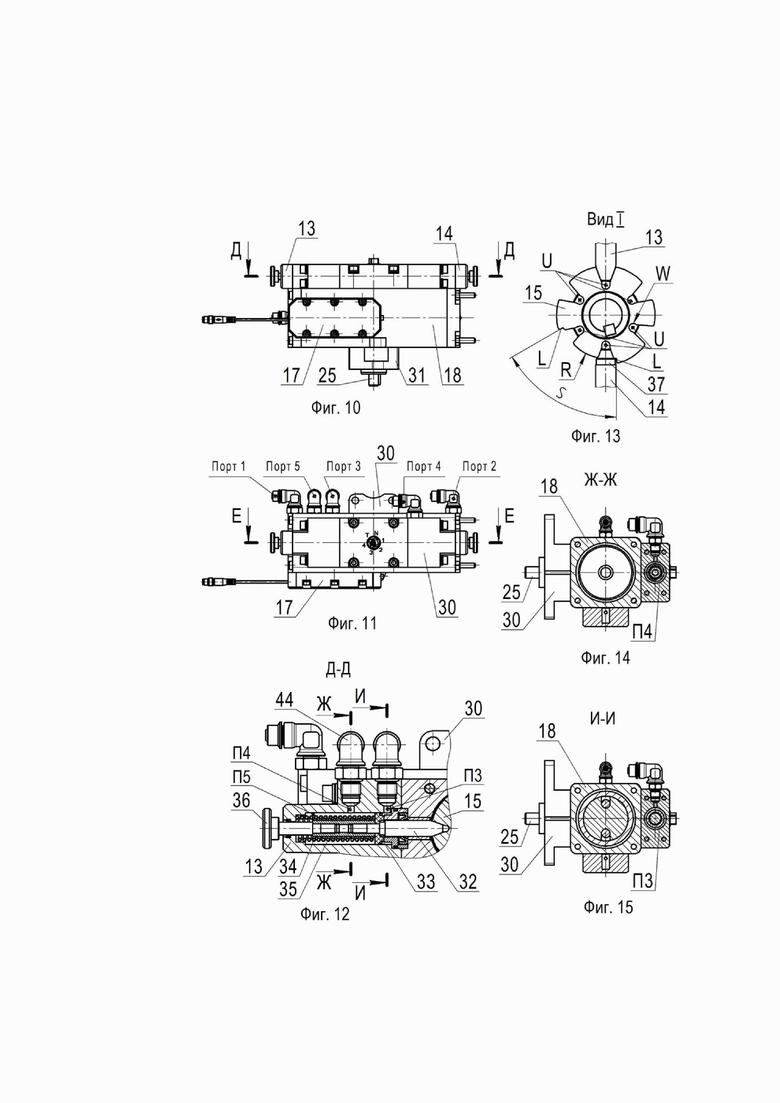
Изобретение иллюстрируется чертежами, где: на фиг. 1 показан общий вид пневмопривода, вид сбоку; на фиг. 2 - пневмопривод, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - разрез Г-Г на фиг 2, пневмопривод в блоком управления и пневмоклапанами; на фиг. 7 - разрез А-А на фиг. 1, блокировка диска в положении «1»; на фиг. 8 - разрез А-А на фиг. 1, блокировка диска в положении «4»; на фиг. 9 - разрез А-А на фиг. 1, привод в положении «Т»; на фиг. 10 - общий вид пневмопривода, вид сбоку, вариант исполнения с дополнительной полостью фиксатора положения диска; на фиг. 11 - пневмопривод, вид сверху, вариант исполнения с дополнительной полостью фиксатора диска положений; на фиг. 12 -разрез Д-Д на фиг. 10, частичный увеличенный вид; на фиг. 13 - вид I на фиг. 7; на фиг. 14 - разрез Ж-Ж на фиг. 12; на фиг. 15 - разрез И-И на фиг. 12; на фиг. 16 - разрез Е-Е на фиг. 11; на фиг. 17 - схема работы пневмопривода системы управления исполнительными механизмами.
Пневматический привод 1 системы управления 2 исполнительными механизмами 3, включающей в себя: пневмомагистраль 4 с источником давления воздуха 5, с датчиком давления воздуха 6; два двухпозиционных пневмоклапана 7 и 8 с электромагнитным управлением положением поршней 9 и 10 и два двухпозиционных пневмоклапана 11 и 12 с электромагнитным управлением положением фиксаторов 13 и 14 диска положений 15; электронный блок управления ЭБУ 16 электромагнитами, выполненный с возможностью получения сигналов от датчика положения поршня 17 и датчика давления воздуха 6 в пневмомагистрали 4.
Пневматический привод 1 содержит пневмоцилиндр 18 с торцевыми крышками 19 и 20.
Внутри пневмоцилиндра 18, установлена плунжерная каретка 21, состоящая из двух поршней 9 и 10, разнесенных на расстояние, равное длине, объединяющего их пустотелого корпуса 22, с надпоршневыми полостями П1 и П2, имеющего продольную герметичную полость 23, сквозь которую поперечно пропущен установленный на опорах 24 в пневмоцилиндре вал 25 с зубчатым колесом 26 в средней его части, сцепленным с зубьями продольно горизонтально расположенной рейки 27, разъемно прикрепленной к указанным поршням 9 и 10, привод 28 исполнительного механизма 3, соединенный с выступающим из корпуса концом выходного вала 25.
На выходном конце указанного вала 25, выступающего из пневмоцилиндра 18, установлен жестко связанный с ним ступицей 29 диск фиксированных положений 15 выходного вала 25.
Диск положений 15 выполнен с открытыми поперечными периферийными впадинами U, количество которых равно заданному числу угловых положений выходного вала 25, связанного с датчиком его угловых положений.
Пневмоцилиндр 18 снабжен кронштейном 30, многопозиционным командоаппаратом 31, соединенным с выходным валом 25, блоком фиксации диска положений 15 выходного вала 25, включающим в себя фиксатор 13 диска положений 15 выходного вала 25 и ограничитель-ретардер 14 поворота диска положений 15, каждый из которых выполнен в виде пневмоцилиндра одностороннего действия с проходным штоком 32.
На штоке 32 каждого из двух двухпозиционных пневмоклапанов 11 и 12 подвижно размещен поршень-упор 33, сопряженный одной стороной с возвратной пружиной 34 и образующий с другой стороны основную полость П3, соединенную с соответствующим пневмоклапаном 11 или 12.
Шток 32 имеет с одного конца зауженную форму с возможностью взаимодействия с указанными ограничительными боковыми поверхностями впадин U на диске, а с другого конца - соединенный с ним муфтой 35 захватный элемент 36 ручного перемещения штока 32.
Диск положений 15 выполнен с возможностью фиксированной остановки в границах заданного сектора S (фиг. 13) средством ограничения поворота.
Диск положений 15 выходного вала 25 выполнен в виде единой детали со ступицей 29, ориентированной внутрь каретки 19 и, несущей подшипники (не показано) выходного вала 25.
Указанные боковые поверхности впадин U на диске положений 15 выполнены криволинейными, выпуклыми, сопряженными с дном впадины посредством уширения W, выполненного по отношению к боковой поверхности с возможностью свободного перемещения концов штоков 32 фиксатора 13 диска положений 15 и ограничителя-ретардера поворота диска положений в процессе их контакта с боковой поверхностью впадин U.
Упомянутое средство ограничения поворота диска устанавливает границы заданного сектора S в виде концевых плоских лысок L, выполненных на ориентированных друг к другу ограничительных боковых поверхностях двух сопряженных впадин U сектора S, причем габаритный диаметр выступа R между ними меньше наружного диаметра остальных выступов диска на величину указанной плоской лыски L, выполненной с возможностью контакта с цилиндрической проточкой 37, выполненной на штоке 32 ограничителя-ретардера 14 поворота диска положений 15.
Поршни 9 и 10 каретки 19 выполнены составными из ступенчатой опорной части, внутренняя ступень 38 которой размещена в полости корпуса каретки19.
На наружной ступени 39 между ее бортом и разъемно соединенной с ней герметизирующей частью установлен кольцевой магнит 40, охваченный опорной направляющей лентой 41.
В крышках 19 и 20 пневмоцилиндра 18 установлены резьбовые ограничители хода 42 поршней 9 и 10.
Фиксатор 13 диска положений 15 может быть снабжен средством блокировки штока, которое включено в систему управления 2 посредством снабжения ее дополнительным пневмоклапаном 43 (фиг. 15), связанным со вспомогательной полостью П5, которая выполнена в штоковой полости П4 фиксатора 13 диска 15.
В качестве датчика угловых положений диска использован линейный датчик положения 17 поршней 9 и 10 каретки 19, подключенный к электронному блоку управления ЭБУ 16 с возможностью пересчета на угловые показатели положений диска положений 15.
Указанные криволинейные боковины выступов между углублениями U в диске положений 15 могут быть выполнены в виде эвольвенты окружности (не показано).
С наружной стороны подвижного поршня-упора 33 в полости П4 пружины 34 фиксатора 13 диска положений 15 образована дополнительная полость П5, связанная посредством штуцера 44 с напорной магистралью дополнительного двухпозиционного пневмоклапана 43 с электромагнитным управлением фиксатором 13 диска положений 15 с возможностью блокирующего поджатия заостренного конца запорной части штока 32 в противолежащую впадину U в диске положений 15 выходного вала 25.
Сравнение заявленного технического решения с уровнем техники, известным из научно-технической и патентной документации на дату приоритета, в основной и смежной рубриках не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в предложенной заявителем формуле изобретения, включая характеристику назначения.
Т.е, совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Техническое решение работоспособности осуществимо и воспроизводимо, а отличительные признаки изобретения позволяют получить заданный технический результат по достижению надежной фиксации и безударности переключения позиций диска положений выходного вала пневмопривода.
Данное техническое решение промышленно применимо, поскольку в описании изобретения и названии указано его назначение, оно может осуществлено промышленным способом и использовано в системах и способах управления исполнительными механизмами.
Изобретение в том виде, как оно охарактеризовано в каждом из пунктов формулы, может быть осуществлено с помощью средств и методов, описанных в прототипе - патенте RU2718382, ставшим общедоступным до даты приоритета изобретения.
Изобретение осуществимо и воспроизводимо, а отличительные признаки, приведенные в формуле изобретения относятся к существенным, поскольку они влияют на возможность решения указанной в заявке технической проблемы и получение обеспечиваемого изобретением технического результата, то есть находятся в причинно-следственной связи с указанным результатом и, поэтому являются существенными.
Следовательно, заявленное техническое решение соответствует условию патентоспособности "промышленная применимость".
Анализ известных технических решений в данной области техники показал, что предложенное техническое решение не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками, а в выявленных таких решениях не подтверждена известность влияния отличительных признаков на указанный в материалах заявки технический результат.
Т.е, заявленное решение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат - повышение надежности фиксации и безударности переключения позиций диска положений выходного вала пневмопривода. Следовательно, предложенное техническое решение может быть получено только путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. имеет изобретательский уровень по сравнению с существующим уровнем техники.
Осуществление заявленного изобретения достигается реализацией указанного назначения.
Для подтверждения возможности осуществления изобретения ниже приводятся сведения о работе устройства, раскрывающие, как может быть осуществлено изобретение с реализацией указанного заявителем назначения и с подтверждением возможности достижения технического результата при осуществлении изобретения.
Пневматический привод 1 системы управления 2 исполнительными механизмами 3 представляет собой пневмомеханическое устройство, служащее для точного и быстрого позиционирования и фиксации ответной части выходного вала 25 пневмопривода в одном из заданных положений. Пневмопривод 1 предназначен для работы в комплексе с электрическим управляемым модулем ЭБУ 16 и блоком пневматических клапанов 45.
Пневмопривод 1 обеспечивает: точное и быстрое позиционирование и фиксацию выходного вала 25 в заданных положениях.
Переключение положений выходного вала 25 осуществляют с использованием сжатого воздуха, подвод которого осуществляется через порты 1, 2, 3, 4, где: порт 1 связан с полостью 1 приводного пневмоцилиндра; порт 2 связан с полостью 2 приводного пневмоцилиндра; порт 3 связан с рабочей полостью 3 фиксатора 13 диска положений 15; порт 4 связан с рабочей полостью 4 ограничителя-ретардера 14 поворота диска положений 15.
Для отслеживания перемещения поршня в пневмоцилиндре используется линейный датчик 17, который подключается к электронному блоку управления ЭБУ 16.
В системе управления работой пневмопривода 1 использована известная схема (фиг. 6), например, из заявки CN №104500717А от 04.09.2014, где применен модуль широтно-импульсной модуляции (ШИМ-модуль) в системе управления коробкой передач транспортного средства или из патента CN №2029270234 от 21.11.2012, в котором положением поршня управляют импульсной подачей воздуха посредством электрических импульсы, передаваемые от ШИМ-модуля электромагнитам пневматических клапанов или из патента RU №2473824, в котором используется ШИМ - модуль для управления электромагнитами в процессе которого воздух подают в одну из полостей пневмоцилиндра в виде импульсных воздействий давления воздуха на поршень при его подаче в обе полости пневмоцилиндра в виде разности импульсных воздействий давления воздуха на поршень.
Также известна подобная схема и из прототипа (патент RU2718382, F15B 9/03 (2006.01), Опубликовано: 02.04.2020 Бюл. № 10).
В этой схеме электронный блок управления ЭБУ 16 использует: устройство обработки данных 46; включающее в себя оперативное запоминающее устройство 47, энергонезависимое запоминающее устройство 48 с компьютерной программой, содержащей процедуры управления и сохраняемую с возможностью выполнения или в сжатом состоянии во внешнем запоминающем устройстве 49 или в оперативном запоминающем устройстве 47; интерфейсы 50 соединения с шиной; модуль 51 с часами реального времен; аналоговые входы 52, конфигурируемые с возможностью перенастройки измерения величин тока и напряжения с помощью встроенного программного обеспечения или с помощью внешней команды; дискретные входы 53, конфигурируемые с возможностью выбрать структуру входного сигнала, дискретные входы 54; выходы 55 с управлением нагрузки по току; выходы 56 с цифровой диагностикой и модулем широтно- импульсной модуляции (ШИМ-модуль).
В этом техническом решении осуществляется способ управления, при котором воздух подают в одну из полостей пневмоцилиндра в виде одного импульса заданной длительности или набора импульсов заданной скважности, в зависимости от положения поршня. Выполняется расфиксация диска положений, подается сигнал управления от ЭБУ на электромагниты пневмоклапанов, открывается один из пневмоклапанов, подается воздух из пневмомагистрали в заданную полость, выполняется поворот диска положений с трапециевидными вырезами на заданный угол против или по часовой стрелке соответственно, после достижения заданного угла поворота диска, регистрируемого датчиком, затем ЭБУ переключается на управление ШИМ-модулем электромагнитами пневмоклапанов блока фиксации и после определения с помощью датчика углового положения диска осуществляют подачу импульсов на электромагниты пневмоклапанов управления пневмоцилиндром, в зависимости от выбранного направления вращения диска положений, после чего подают воздуха в одну из полостей пневмоцилиндра в виде одного или более импульсов в соответствующие надпоршневые полости для перемещения поршня и связанного с ним вращения выходного вала в заданном направлении.
Работа пневматического привода 1 системы управления исполнительными механизмами осуществляется следующим образом.
Пневматический привод обеспечивает позиционирование выходного вала 25 в трех режимах: штатный режим работы, переключение привода в ручном режиме и переключение привода электронным блоком управления в случае выхода из строя линейного датчика 17 перемещения поршней 9 и 10.
Реализации использования пневмопривода может быть проиллюстрирована на приведенном ниже примере управления механизмом переключения передач трактора.
Пневмопривод 1 позволяет осуществлять поворот и фиксацию выходного вала 25 в шести положениях: Т, N, 1, 2, 3, 4, где: N - положение «нейтраль»; T - положение «тормоз-синхронизатор»; 1-4 номера передач МКПП.
Пневмопривод 1 предотвращает произвольное переключение в положение T в случае обрыва подводящих сжатый воздух патрубков, обрыва проводов датчика 17 или выхода из строя пневмоклапанов, управляющих подачей сжатого воздуха.
Переключение привода осуществляется с использованием сжатого воздуха, подключение которого осуществляется через порты 1, 2, 3, 4 (фиг. 11) где, порт 1 связан с полостью 1 приводного пневмоцилиндра; порт 2 связан с полостью 2 приводного пневмоцилиндра; порт 3 связан с рабочей полостью фиксатора положений; порт 4 связан с рабочей полостью ограничителя хода.
В одну из полостей цилиндра, через порт 1 (для вращения вала против часовой стрелки) или порт 2 (для вращения вала по часовой стрелке), импульсно подается сжатый воздух. Линейное перемещение поршня преобразуется во вращательное движение выходного вала 25 пневмопривода 1 посредством передачи «рейка-шестерня», где рейка является составной частью поршня приводного пневмоцилиндра, а шестерня частью вала 25 пневмопривода.
На валу 25 расположен диск с шестью выемками U трапецеидальной формы контактной части со скругленными боковыми сторонами.
Вал 25 неподвижно блокируется в требуемом положении фиксатором положений 13 с конической контактной частью, которая входит в зацепление с одним из ответных пазов U трапецеидальной формы на диске положений.
В неактивном состоянии ограничивается поворот вала 25 в пределах сектора S, крайние точки которого соответствуют соседним друг другу выемкам для положений «N» и «1».
Фиксатор 13 диска положений 15 выходит из зацепления с впадиной U при подаче в порт 3 сжатого воздуха и возвращается в исходное положение под воздействием механической пружины 34 при сбросе воздуха.
Ограничитель-ретардер поворота 14 диска положений 15 выходит из зацепления с впадиной U. При подаче в порт 4 сжатого воздуха ограничитель-ретардер поворота 14 возвращается в исходное положение под действием механической пружины 34 при сбросе воздуха, опираясь торцом штока в цилиндрическую поверхность диска положений. Это дает эффект тормоза-замедлителя (ретардера), синхронизируя безударный контакт острия фиксатора 13 с соответствующей впадиной U диска положений 15.
В крышках 19 и 20 пневмоцилиндра 18 установлены резьбовые ограничители хода 42 поршней 9 и 10 пневмоцилиндра в крайних положениях, что соответствует положениям оси привода «T» и «4».
В изобретении используется известная, в том числе и из прототипа RU2718382 схема системы управления (фиг. 6), которой осуществляется способ управления пневмоприводом в соответствии со схемой его работы ( фиг. 17).
Посредством системы управления ЭБУ 16 подает электрический сигнал на пневмоклапана 7, 8, 11, 12 пневмоклапанов блока пневматических клапанов 45, из которых двухпозиционные пневмоклапаны 7 и 8 реализуют электромагнитное управление положением поршней 9 и 10. Пневмоклапаны 11 и 12 (фиг. 6) управляют фиксатором 13 диска положений 15 и ограничителем-ретардером поворота диска положений 15.
Чтобы повернуть выходной вал 25 по часовой или против часовой стрелки необходимо расфиксировать диск положений 15 путем подачи электрического сигнала на катушки пневмоклапанов 11 и 12.
В зависимости от алгоритма ЭБУ 16 выдает электрический сигнал на катушки пневмоклапанов 7 и 8, осуществляя подачу воздуха в одну из полостей П1 или П2 пневмоцилиндра 18. В зависимости от этого приводной вал 25 с диском положений 15 поворачивается по часовой или против часовой стрелки.
С помощью датчика положения 17 определяют текущее положение поршней 9 и 10 пневмопривода.
Система постоянно проверяет состояние датчиков и некоторых параметров системы. Если датчик положения 17 не работает (выдает некорректный сигнал), то оператору О выдается сообщение о неисправности датчика, а также звуковой сигнал сигнализирует о переходе в аварийное состояние работы.
В аварийном состоянии работы оператор О может автоматически включить первую передачу и эвакуировать транспортное средство, для чего сначала по меткам положений выходного вала 25 нужно выставить диск 15 в положение «N», а потом включить передачу «Т» (для возможности выбора направления движения «вперед» или «назад»), после чего включить передачу «1» для возможности движения в аварийном состоянии.
После выбора нужного режима оператор О может последовательно включить любую передачу N-1-2-3-4, причем каждая передача имеет свой диапазон значений датчика 17 в ЭБУ 16.
При выборе нужной передачи сначала подается электрический сигнал на пневмоклапан 11 фиксатора положений 13, в результате чего расфиксируется выходной вал 25. Затем, в зависимости от того, какую передачу нужно включить (повышенную или пониженную), подают сигнал на пневмоклапан 7 или 8.
В момент поворота вала 25 в нужный диапазон происходит непрерывный контроль скорости (поддержание скорости в нужном диапазоне).
Если в момент поворота выходного вала 25 в нужный диапазон какой-либо передачи скорость превысить некое значение, то происходит торможение и к моменту подхода в нужный диапазон убирается сигнал с пневмоклапана 11. Фиксатор положений 13 оставшийся путь до нужного диапазона скользит конусообразным концом по поверхности диска положений 15 достигает нужного диапазона.
Поступает сигнал от датчика - включена нужная передача, затем осуществляют сброс воздуха. Выдается соответствующая надпись на панели. Если передача не включилась, попытка повторяется. Если за определенное время передача включена не будет, то система перейдет в аварийное состояние.
При использовании варианта пневмопривода 1 с дополнительным стопорением фиксатора 13 (фиг. 16) с электромагнитным управлением для блокирующего поджатия заостренного конца запорной части штока в противолежащей впадине U в диске положений 15.), подают воздух в дополнительную полость 5 через штуцер 44 из напорной магистрали через дополнительный двухпозиционного пневмоклапан 43.
Таким образом, использование данного изобретение позволяет повысить надежность фиксации и безударность переключения позиций диска положений выходного вала пневмопривода
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический привод, система и способ управления пневматическим приводом | 2019 |
|
RU2718382C1 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| КОДОВЫЙ ЗАМОК | 1993 |
|
RU2074941C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОРШНЕВЫХ И СТРУЙНЫХ ПНЕВМОПРИВОДОВ ШАРОВЫХ КРАНОВ ТРУБОПРОВОДОВ | 2001 |
|
RU2194885C1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Пневматический инъектор | 1983 |
|
SU1196008A1 |
| ПРИВОД МЕХАНИЗМА ОТКИДНОЙ ЧАСТИ ФОНАРЯ САМОЛЕТА И ВРЕМЕННОЙ КЛАПАН | 2008 |
|
RU2372249C1 |




Изобретение относится к области общего машиностроения, к пневматическим приводам управления исполнительными механизмами преимущественно в транспортных средствах. В предложенном пневматическом приводе системы управления исполнительными механизмами диск положений выходного вала выполнен в виде единой детали со ступицей, ориентированной внутрь каретки и несущей подшипники выходного вала. Боковые поверхности впадин на диске положений выполнены криволинейными, выпуклыми, сопряженными с дном впадины посредством уширения, выполненного по отношению к боковой поверхности с возможностью свободного перемещения концов штоков фиксатора диска положений и ограничителя-ретардера поворота диска положений в процессе их контакта с боковой поверхностью впадин. Средство ограничения поворота диска устанавливает границы заданного сектора в виде концевых плоских лысок, выполненных на ориентированных друг к другу ограничительных боковых поверхностях двух сопряженных впадин сектора. Габаритный диаметр выступа между ними меньше наружного диаметра остальных выступов диска на величину указанной плоской лыски, выполненной с возможностью контакта с цилиндрической проточкой, выполненной на штоке ограничителя-ретардера поворота диска положений. Поршни каретки выполнены составными из ступенчатой опорной части, внутренняя ступень которой размещена в полости корпуса каретки, а на наружной ступени между ее бортом и разъёмно соединенной с ней герметизирующей частью установлен кольцевой магнит, охваченный опорной направляющей лентой. В крышках пневмоцилиндра установлены резьбовые ограничители хода поршней. Фиксатор диска снабжен средством блокировки штока, которое включено в систему управления посредством снабжения её дополнительным пневмоклапаном, связанным со вспомогательной полостью, которая выполнена в штоковой полости фиксатора диска положений. В качестве датчика угловых положений диска использован линейный датчик положения поршней и каретки, подключенный к электронному блоку управления с возможностью пересчета на угловые показатели положений диска положений. 2 з.п. ф-лы, 17 ил.
1. Пневматический привод системы управления исполнительными механизмами, включающий в себя пневмомагистраль с источником давления воздуха, с датчиком давления воздуха, два двухпозиционных пневмоклапана с электромагнитным управлением положением поршней и два двухпозиционных пневмоклапана с электромагнитным управлением положением фиксаторов диска, электронный блок управления электромагнитами, выполненный с возможностью получения сигналов от датчика положения поршня и датчика давления воздуха в пневмомагистрали, при этом пневматический привод содержит пневмоцилиндр с торцевыми крышками, при этом внутри пневмоцилиндра установлена плунжерная каретка, состоящая из двух поршней, разнесённых на расстояние, равное длине объединяющего их пустотелого корпуса с надпоршневыми полостями, имеющего продольную герметичную полость, сквозь которую поперечно пропущен установленный на опорах в пневмоцилиндре вал с зубчатым колесом в средней его части, сцепленным с зубьями продольно горизонтально расположенной рейки, разъёмно прикреплённой к указанным поршням, привод исполнительного механизма, соединенный с выступающим из корпуса концом выходного вала, при этом на выходном конце указанного вала, выступающего из пневмоцилиндра, установлен жестко связанный с ним ступицей диск фиксированных положений выходного вала, выполненный с открытыми поперечными периферийными впадинами, количество которых равно заданному числу угловых положений выходного вала, связанного с датчиком его угловых положений, при этом пневмоцилиндр снабжен кронштейном, многопозиционным командоаппаратом, соединенным с выходным валом, блоком фиксации диска положений выходного вала, включающим в себя фиксатор диска положений выходного вала и ограничитель-ретардер поворота диска положений, каждый из которых выполнен в виде пневмоцилиндра одностороннего действия с проходным штоком, на котором подвижно размещен поршень-упор, сопряженный одной стороной с возвратной пружиной и образующий с другой стороны основную полость, соединенную с соответствующим пневмоклапаном, при этом шток имеет с одного конца зауженную форму с возможностью взаимодействия с указанными ограничительными боковыми поверхностями впадин на диске, а с другого конца - соединенный с ним муфтой захватный элемент ручного перемещения штока, выполненный с возможностью фиксированной остановки в границах заданного сектора средством ограничения поворота, отличающийся тем, что диск положений выходного вала выполнен в виде единой детали со ступицей, ориентированной внутрь каретки и несущей подшипники выходного вала, а указанные боковые поверхности впадин на диске положений выполнены криволинейными, выпуклыми, сопряженными с дном впадины посредством уширения, выполненного по отношению к боковой поверхности с возможностью свободного перемещения концов штоков фиксатора диска положений и ограничителя-ретардера поворота диска положений в процессе их контакта с боковой поверхностью впадин, при этом упомянутое средство ограничения поворота диска устанавливает границы заданного сектора в виде концевых плоских лысок, выполненных на ориентированных друг к другу ограничительных боковых поверхностях двух сопряженных впадин сектора, причем габаритный диаметр выступа между ними меньше наружного диаметра остальных выступов диска на величину указанной плоской лыски, выполненной с возможностью контакта с цилиндрической проточкой, выполненной на штоке ограничителя-ретардера поворота диска положений, при этом поршни каретки выполнены составными из ступенчатой опорной части, внутренняя ступень которой размещена в полости корпуса каретки, а на наружной ступени между ее бортом и разъёмно соединенной с ней герметизирующей частью установлен кольцевой магнит, охваченный опорной направляющей лентой, причём в крышках пневмоцилиндра установлены резьбовые ограничители хода поршней, при этом фиксатор диска снабжен средством блокировки штока, которое включено в систему управления посредством снабжения её дополнительным пневмоклапаном, связанным со вспомогательной полостью, которая выполнена в штоковой полости фиксатора диска положений, при этом в качестве датчика угловых положений диска использован линейный датчик положения поршней и каретки, подключенный к электронному блоку управления с возможностью пересчета на угловые показатели положений диска положений.
2. Пневматический привод по п.1, отличающийся тем, что указанные криволинейные боковины выступов между углублениями в диске положений выполнены в виде эвольвенты окружности.
3. Пневматический привод по п.1, отличающийся тем, что с наружной стороны подвижного поршня-упора пружины фиксатора положения диска образована дополнительная полость, связанная посредством штуцера с напорной магистралью дополнительного двухпозиционного пневмоклапана с электромагнитным управлением фиксатором диска положений с возможностью блокирующего поджатия заостренного конца запорной части штока в противолежащую впадину в диске положений выходного вала.
| Пневматический привод, система и способ управления пневматическим приводом | 2019 |
|
RU2718382C1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |
| ГИДРОПРИВОД ДИСКРЕТНОГО УГЛОВОГО ХОДА | 2012 |
|
RU2497027C1 |
| US 2010288120 A1, 18.11.2010 | |||
| US 4883091 A, 28.11.1989. | |||

