Изобретение предназначено для использования на железнодорожном транспорте и относится к устройствам автоматики и телемеханики для управления вагонными замедлителями на сортировочных горках.
Известна система управления вагонным замедлителем (ПМ RU №87132 от 12.02.2008), включающая пневмомагистраль сжатого воздуха, пневмосеть вагонного замедлителя с датчиком давления, воздухосборник, соединенный с пневмомагистралью сжатого воздуха, блоки пневматически управляемых клапанов, через которые пневмосеть вагонного замедлителя соединена с воздухосборником, блок управления клапанами с электрическими входами и пневматическими выходами, соединенными с блоками пневматически управляемых клапанов, а также нагревательные элементы с устройством включения и датчиком температуры. Система управления включает микропроцессорный блок управления, содержащий устройство вода информации, связанное с пультом оператора, процессорное устройство, входы которого соединены с устройством ввода информации, с датчиком температуры через аналого-цифровой преобразователь, с датчиком давления воздуха в пневмосети вагонного замедлителя через аналого-цифровой преобразователь и управляемый узел задержки сигнала, а выходы через цифровые компараторы с изменяемым порогом соединены с электрическими входами блока управления клапанами и с устройством включения нагревательных элементов.
Система управления может включать связанный с процессорным устройством блок индикации текущих параметров системы, с расположением световых индикаторов на пульте оператора.
Недостаток вышеописанных известных устройств в том, что непосредственное электрическое управление тормозными и растормаживающими клапанами не позволяет осуществлять точное регулирование величины их открытия, что приводит к избыточному расходу воздуха при работе вагонных замедлителей.
Известен пневматический прямоточный клапан (патент RU №182505 от 17.11.2017), состоящий из корпуса в виде гильзы с внутренней полостью, образованной между гильзой и установленным в ней цилиндрическим клапаном с закрепленным на нем поршнем, делящим внутреннюю полость на две камеры; крышки с закрепленным в ней седлом с отверстиями на его периферии для протекания воздуха и с уплотнительным кольцом, взаимодействующим с цилиндрическим клапаном в закрытом положении; максимальный ход поршня превышает половину радиуса центрального канала цилиндрического клапана.
Известен пневматический регулятор давления (заявка на изобретение WO №2019/186483 от 30.03.2018), имеющий нагрузочный и разгрузочный электромагнитные клапаны, соединяемые поочередно с надмембранной полостью пневматического клапана, регулирующего величину давления воздуха на выходе из подсоединенного к пневмолинии управления отверстия в корпусе клапана. Управление регулятором давления осуществляется от микропроцессора, к которому подсоединена электрическая часть датчика давления, пневматическая часть которого соединена с пневмолинией управления. Отличительной особенностью данного пневматического регулятора является то, что микропроцессор обеспечивает подачу на соленоид электромагнитного клапана заданной величины электрического сигнала управления, обеспечивающей заданное давление на выходе из отверстия в корпусе (в управляемой пневмолинии).
Известны способ и система автоматического управления клапаном-регулятором (патент RU №2490688 от 26.05.2010), причем система содержит объект управления, состоящий из клапана-регулятора с затвором, соединенным с приводом, датчики давления на входе и выходе клапана-регулятора, вычислительное устройство с входными преобразователями, соединенными соответственно с датчиками давления на входе и выходе клапана-регулятора, и с выходными преобразователями для управления положением затвора, при этом клапан-регулятор снабжен датчиком положения затвора, а вычислительное устройство содержит входные преобразователи для соединения с выходом датчика положения затвора, при этом действительное положение затвора клапана-регулятора hi вычисляется по формуле:
hi=Qизм/Qмах⋅L,
где L - полный ход клапана-регулятора;
Qизм - измеряемый расход газа при данном положении затвора;
Qмах - максимальный расход газа при полностью открытом клапане-регуляторе.
В процессе работы вычислительное устройство выполняет следующий алгоритм работы: непрерывный сбор данных о состоянии системы, ввод данных и выполнение, полученных команд с интерфейса, анализ и передача данных о состоянии системы в интерфейс, плавное заполнение выходного трубопровода газом, основной режим - обеспечение выходного давления в расширенном диапазоне заданных уставок давления с одновременным отслеживанием и поддержанием необходимого расхода газа за счет обработки данных и управления через выходной преобразователь положением затвора клапана-регулятора.
Известна система управления клапаном (патент RU №2719088 от 07.10.2016), содержащая: контроллер клапана, который содержит: один или большее количество процессоров; датчик положения клапана, соединенный с клапаном и одним или большим количеством процессоров; передатчик, соединенный с датчиком положения клапана и одним или большим количеством процессоров; контроллер позиционирования, соединенный с клапаном, датчиком положения клапана, передатчиком и одним или большим количеством процессоров; и долговременное машиночитаемое запоминающее устройство.
Известны способ и устройство для контроля и/или наблюдения за пневматическим приводом (патент RU №2643313 от 06.06.2013). Устройство имеет: процессор, расположенный внутри корпуса, для выполнения управляющего приложения; датчик положения для контроля положения клапана, соединенного с пневматическим приводом, причем датчик положения обеспечивает управляющее приложение информацией о положении клапана.
Работа устройства включает настройку управляющего процесса с помощью процессора в устройстве управления, соединенном с клапаном, содержащим датчик положения; контроль положения клапана с помощью датчика положения; обеспечение поступления пневматического сигнала к приводу, с использованием устройства управления для перемещения клапана, причем пневматический сигнал устанавливается на основании настроек управления и данных о положении клапана.
Далее в описании использованы следующие сокращения:
БК - блок коммутации
ВЗ - вагонный замедлитель
ГП - горочный пост
Д - датчик давления
ПП - пневматический привод
ПРД - пневматический регулятор давления
ПЦ - пневмоцилиндр
РПК - растормаживающий прямоточный клапан
РД - регулятор давления
ТПК - тормозной прямоточный клапан
ШИМ - широтно-импульсная модуляция
Э - электромагнит
ЭБУ - электронный блок управления
ЭП БУК - электропневматический блок управления клапанами.
Известно устройство пневматического привода и управления пневматическим приводом ВЗ (воздухосборник ВУП3-05Э, ДУВК.665212.001-01 РЭ), состоящее из ведущего воздухосборника с установленной на нем аппаратурой электропневмоуправления, включающей ПРД, состоящий из тормозного и растормаживающего клапанов, установленных в пневмомагистрали, соединяющей воздухосборник с пневмоцилиндрами пневматического привода ВЗ; электропневматический блок управления пневматическим регулятором давления, соединенный с воздухосборником; ЭБУ; БК, вход которого подсоединяется к выходам ГП, а выход БК соединен с ЭБУ; блок аппаратуры дистанционного контроля; блок грозозащиты.
Управление клапанами осуществляется командами с ГП, передаваемыми на ЭБУ через БК.
Для управления ВЗ предусмотрены восемь режимов торможения и режим растормаживания. Для каждого из режимов предусмотрена установка нижнего и верхнего уровня давления, в пределах которых давление удерживается автоматически включением тормозных и растормаживающих клапанов.
Недостаток данного устройства пневматического привода и управления В3-пониженная точность управления величиной давления в пневмоприводе, колебания силы торможения колес и повышенный расход воздуха на работу пневмопривода ВЗ, вследствие того, что тормозные и растормаживающие клапаны ПРД не являются прямоточными, их подвижные клапаны прижимаются к седлу с большой силой, значительно уменьшающейся в момент открытия, что вызывает скачки давления воздуха в пневмомагистрали и пневмоцилин-драх ВЗ.
Известно устройство управления пневматическим приводом ВЗ (патент на изобретение RU №2689468 от 17.11.2017), имеющего механизмы с пневмоцилиндрами торможения правых и левых колес вагона, каждый пневмоцилиндр пневмопривода которого соединен пневмомагистралями с воздухосборником под давлением, содержащее установленный в пневмомагистрали прямоточный тормозной клапан, вход которого подсоединен к воздухосборнику, а выход - к пневмоцилиндру ВЗ, управляемый от поршневого пневмоцилиндра, поршень которого делит пневмоцилиндр тормозного клапана на первую и вторую управляющую полости; растормаживающий клапан, конструктивно идентичный тормозному клапану, установленный в каждой пневмомагистрали, вход которого подсоединен к участку пневмомагистрали между выходом тормозного клапана и пневмоцилиндром ВЗ, а выход соединен с атмосферой; электропневматический блок управления тормозным и растормаживающим клапанами, имеющий: первый пневмоклапан с электропневматическим управлением, вход которого соединен через воздушный фильтр с воздухосборником, а выход - с первыми управляющими полостями поршневых пневмоци-линдров тормозных клапанов, второй пневмоклапан с электропневматическим управлением, вход которого соединен через воздушный фильтр с воздухосборником, а выход - с первыми управляющими полостями поршневых пневмоцилиндров растормаживающих клапанов; ЭБУ первым и вторым пневмоклапанами, имеющий интерфейс пользователя; комплекс пневмоэлектрических датчиков давления, электрическая часть которых подсоединена к электронному блоку, включающий: первый датчик давления, подсоединенный к участку пневмомагистрали между выходом тормозного клапана ВЗ, электрическая часть которого соединена с ЭБУ, второй датчик давления воздуха, присоединенный к управляющим полостям тормозных клапанов, третий датчик давления воздуха подсоединен к воздухосборнику, электрические части первого, второго и третьего датчиков подсоединены к ЭБУ.
Недостаток известного устройства - в том, что в нем не раскрыта структура ЭБУ, которая бы обеспечила повышение точности управления давлением воздуха и, соответственно, величиной создаваемой пневмоцилиндрами силы торможения колес вагона, а также снижение расхода воздуха при работе ВЗ.
Техническая задача, решаемая изобретением, - повышение точности управления величиной силы торможения колес вагона, создаваемой пневмоцилиндрами, а также снижение расхода воздуха при работе ВЗ.
Техническая задача решена в системе управления ПП ВЗ с механизмами торможения правых и левых колес вагона (вагонного отцепа) с пневмоцилин-драми привода каждого механизма, с главной пневмолинией, соединяющей пневмоцилиндры механизмов торможения колес вагона, содержащая: воздухосборник, подсоединенный к главной пневмолинии, соединяющей пневмоцилиндры, по меньшей мере, одной пневмомагистралью, имеющей, по меньшей мере, один пневматический регулятор давления воздуха, поступающего из воздухосборника по пневмомагистрали и пневмолинии в пневмоцилиндры и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных, пневматически управляемых, имеющих неподвижные корпусные детали с седлом и подвижный цилиндрический клапан, контактирующий с седлом, тормозного прямоточного клапана, имеющего полость, управляющую его открытием, и полость, управляющую его закрытием, подсоединенную к пневмомагистрали за выходным патрубком, и растормаживающего прямоточного клапана, полость которого, управляющая его открытием, подсоединена к пневмомагистрали за патрубком тормозного прямоточного клапана через клапан «или» и к воздухосборнику через второй двухпозиционный пневмораспределитель с электромагнитным управлением и через третью пневмолинию для открытия растормаживающего прямоточного клапана или с атмосферой при закрытии растормаживающего прямоточного клапана, и полость, управляющую его закрытием; при этом вход растормаживающего прямоточного клапана соединен с пневмомагистралью за патрубком тормозного пневмоклапана, а выход - с атмосферой; электропневматический блок управления клапанами пневматического регулятора давления, включающий регулятор давления воздуха, поступающего через фильтр из воздухосборника, управляемый двумя двухпозиционными пневмоклапанами с электромагнитным управлением; первую пневмолинию, соединяющую выходной патрубок регулятора давления с полостью, управляющей открытием тормозного прямоточного клапана, соединенную с пневматической полостью первого датчика давления; вторую пневмолинию, подсоединенную к главной пневмолинии и к пневматической части второго датчика давления и периодически соединяемую через первый двухпозиционный пневмораспределитель с электромагнитным управлением к полости, управляющей закрытием растормаживающего прямоточного клапана; третий датчик давления, пневматическая часть которого подсоединена к воздухосборнику; электрические выходы первого, второго и третьего датчиков давления соединены с модулем аналоговых сигналов ЭБУ; БК, имеющий блок гальванических развязок и грозозащиты; ЭБУ электромагнитами ЭП БУК, входы которого соединены через БК с выходами управления от ГП, состоящий из контроллера, энергонезависимой памяти, соединенных с контроллером модуля аналоговых сигналов, модуля дискретных сигналов, соединяемого с электромагнитами управления ЭП БУК; пульт оператора с интерфейсом; модуль дискретных сигналов ЭБУ соединяется с электромагнитами управления клапанами РД и первым и вторым электромагнитами пневмораспределителей, управляемыми в соответствии с программой, сохраняемой в блоке энергонезависимой памяти контроллера; блок диагностики, соединенный с БК, контроллером, энергонезависимой памятью, модулями аналоговых и дискретных сигналов; аварийный блок управления, подсоединенный к БК, контроллеру и пульту управления, при этом как тормозной, так и растормаживающий прямоточные клапаны, составляющие ПРД, имеют установленные в неподвижной корпусной детали датчики положения цилиндрического клапана относительно седла, электрически соединенные с модулем аналоговых сигналов ЭБУ.
Для более плавного управления открытием двухпозиционных пневмоклапанов управления РД модуль дискретных сигналов ЭБУ имеет ШИМ-модуль.
Достижение технического эффекта, - повышение точности управления величиной силы торможения колес вагона, создаваемой пневмоцилиндрами, а также снижение расхода воздуха при работе ВЗ, - обеспечивается следующей совокупностью отличительных признаков системы управления: как тормозной, так и растормаживающий прямоточные клапаны, составляющие ПРД, имеют установленные в неподвижной корпусной детали датчики положения цилиндрического клапана относительно седла, электрически соединенные с модулем аналоговых сигналов ЭБУ.
Приведенная выше совокупность отличительных признаков системы не обнаружена в процессе патентно-информационного поиска, следовательно, техническое решение соответствует критерию «новизна». Она также не следует явно из уровня техники, следовательно, решение соответствует критерию «изобретательский уровень».
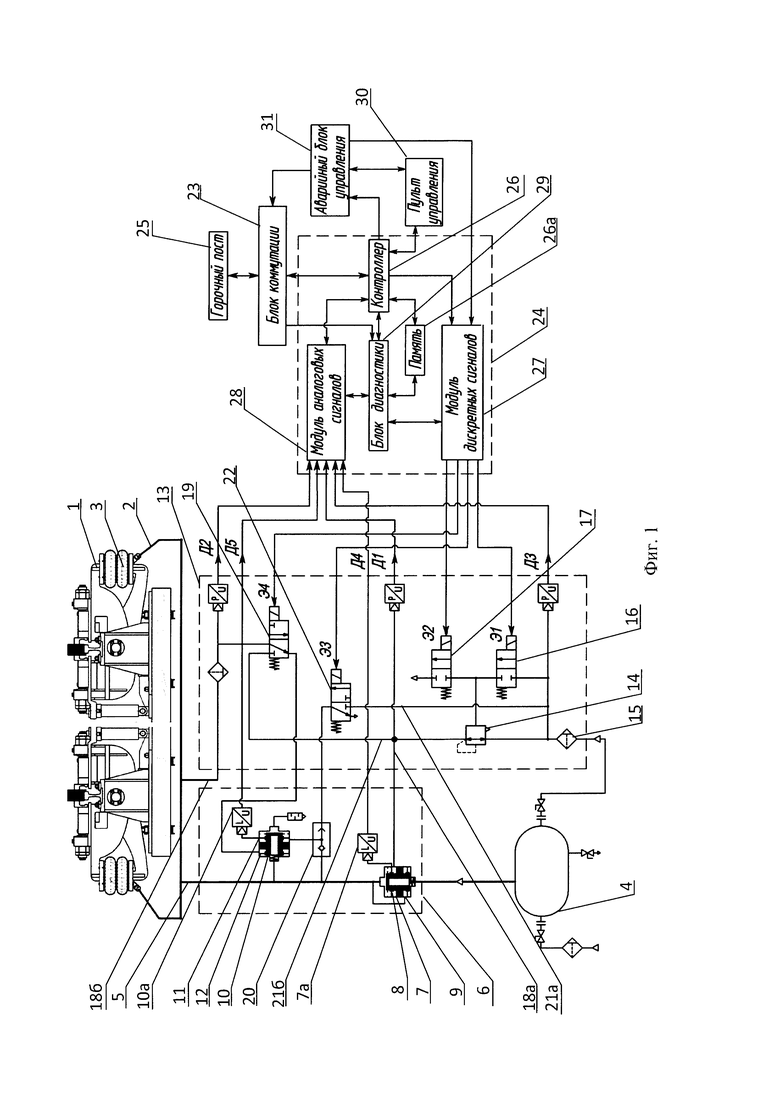
На фиг. 1 показана блок-схема системы управления пневматическим приводом ВЗ, имеющей один ПРД.
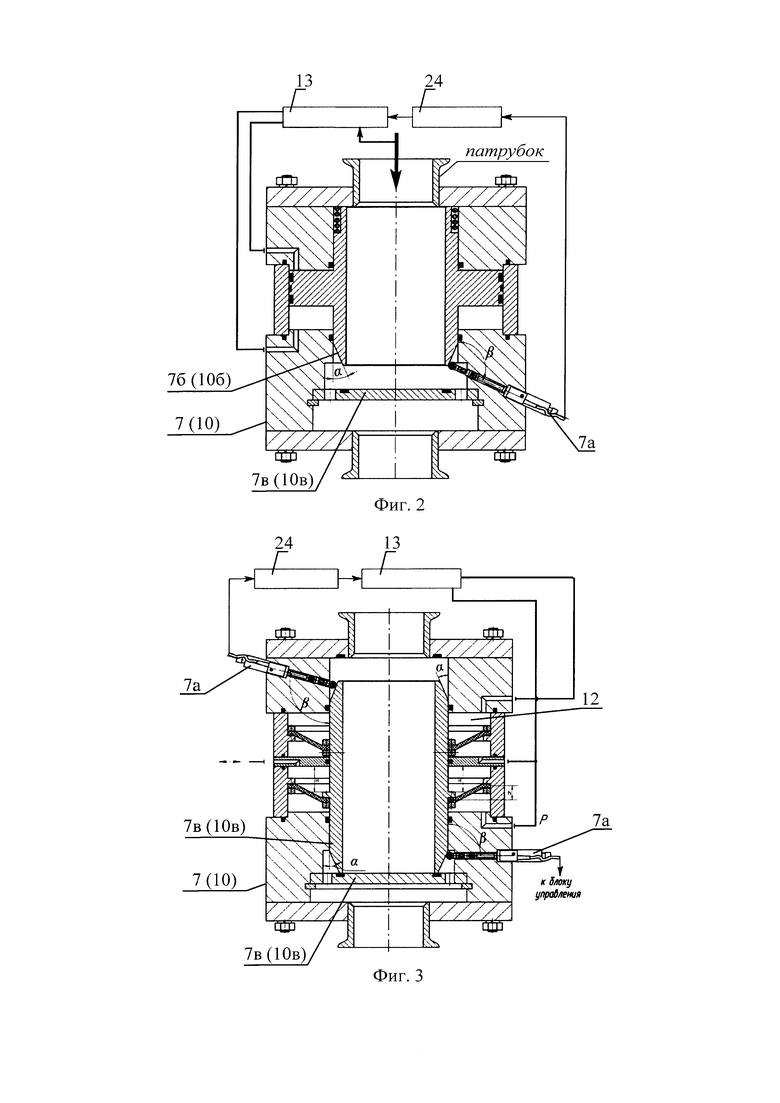
На фиг. 2 показана конструкция как тормозного, так и растормаживающего пневматического прямоточного клапана с поршневым приводом с датчиком положения цилиндрического клапана.
На фиг. 3 показана конструкция как тормозного, так и растормаживающего пневматического прямоточного клапана с диафрагменным приводом с двумя датчиками положения цилиндрического клапана.
Обозначения, принятые на фиг. 1-3:
1 - механизмы торможения;
2 - главная пневмолиния;
3 - пневмоцилиндры (ГГЦ);
4 - воздухосборник;
5 - пневмомагистраль;
6 - пневматический регулятор давления (ПРД);
7 - тормозной прямоточный клапан (ТПК);
7а - датчик положения цилиндрического клапана ТПК 7;
7б - цилиндрический клапан ТПК 7;
7в - седло ТПК 7;
8 - полость, управляющая открытием ТПК 7;
9 - полость, управляющая закрытием ТПК 7;
10 - растормаживающий прямоточный клапан (РПК);
10а - датчик положения цилиндрического клапана РПК 10;
10б - цилиндрический клапан РПК 10; 10в- седло РПК 10;
11 - полость, управляющая открытием РПК 10;
12 - полость, управляющая закрытием РПК 10;
13 - электропневматический блок управления пневмоклапанами (ЭП БУК);
14 - регулятор давления (РД);
15 - фильтр;
16 - двухпозиционный пневмоклапан;
17 - двухпозиционный пневмоклапан;
18а - первая пневмолиния;
18б - вторая пневмолиния
19 - первый пневмораспределитель;
20 - клапан «или»;
21а - третья пневмолиния;
21б - четвертая пневмолиния;
22 - второй пневмораспределитель;
23 - блок коммутации;
24 - электронный блок управления электромагнитами;
25 - горочный пост;
26 - контроллер;
26а - энергонезависимая память контроллера;
27 - модуль дискретных сигналов;
28 - модуль аналоговых сигналов;
29 - блок диагностики;
30 - пульт управления с интерфейсом;
31 - аварийный блок управления.
Система управления ПП ВЗ (фиг. 1) с механизмами 1 торможения правых и левых колес вагона (вагонного отцепа) с пневмолинией 2, соединяющей пневмоцилиндры 3 привода каждого механизма 1, содержащая воздухосборник 4, подсоединенный к пневмолинии 2, по меньшей мере, одной пневмомагистралью 5, имеющей, по меньшей мере, один ПРД 6 воздуха, поступающего из воздухосборника 4 по пневмомагистрали 5 и пневмолинии 2 в пневмоцилиндры 3 и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных пневматически управляемых ТПК 7, имеющего полость 8, управляющую его открытием, с датчиком 7а положения цилиндрического клапана относительно седла, и полость 9, управляющую его закрытием, подсоединенную за выходным патрубком ТПК 7 к главной пневмомагистрали 5, и РПК 10, имеющего полость 11, управляющую его открытием, с подсоединенным к ней датчиком 10а положения цилиндрического клапана 10б (фиг. 2, 3) относительно седла 10в (фиг. 2, 3), и полость 12, управляющую его закрытием; при этом вход РПК 10 соединен с главной пневмомагистралью 5 за патрубком ТПК 7, а выход - с атмосферой; как ТПК 7, так и РПК 10, составляющие ПРД 6, имеют установленные в их корпусах датчики 7а и 10а (фиг. 1) положения цилиндрических клапанов 7б и 10б (фиг. 2, 3) относительно их седел 7в и 10в (фиг. 2, 3), электрические выходы; ЭП БУК 13, включающий РД 14 воздуха, поступающего через фильтр 15 от воздухосборника 4, управляемый двумя двухпозиционными пневмоклапанами 16, 17 с электромагнитным управлением (Э1 и Э2 соответственно); первую пневмолинию 18а, соединяющую выходной патрубок РД 14 с полостью 8, управляющей открытием ТПК 7, соединенную с пневматической полостью первого датчика Д1 давления; вторую пневмолинию 18б, подсоединенную к главной пневмолинии 2 и к пневматической части второго датчика Д2 давления (датчик Д2 может быть подсоединен второй пневмолинией 18б к пневмомагистрали 5 перед главной пневмолинией 2, а также к любому ПЦ 3) и периодически соединяемую через первый двухпозиционный пневмораспределитель 19 управляемый электромагнитом Э4 к полости 12, управляющей закрытием РПК 10; третий датчик ДЗ давления, пневматическая часть которого подсоединена к воздухосборнику 4; полость 11, управляющая открытием РПК 10 ПРД 6, подсоединена к пневмомагистрали 5 за патрубком ТПК 7 через клапан 20 «или» и к воздухосборнику 4 через третью пневмолинию 21 а и второй двухпозиционный пневмораспределитель 22, управляемый электромагнитом ЭЗ, включаемым для открытия РПК 10 и выключаемым для соединения полости 11 с атмосферой при закрытии РПК 10; при этом полость 12, управляющая закрытием РПК 10, соединяется через первый двухпозиционный пневмораспределитель 19 четвертой пневмолинией 21б с первой пневмолинией 18а для закрытия РПК 10; БК 23, имеющий блок гальванических развязок и грозозащиты; ЭБУ 24, управляющий электромагнитами ЭП БУК, соединенный с выходами управления от ГП 25, состоящий из контроллера 26, энергонезависимой памяти 26а, модуля 27 дискретных сигналов, соединенного с электромагнитами с электромагнитами Э1, Э2, Э3, Э4, и модуля 28 аналоговых сигналов, соединенного с электрическими выходами датчиков Д1, Д2, Д3 и с электрическими выходами датчиков положения Д4 и Д5; с контроллером 26; а также соединенные с контроллером 26 блок 29 диагностики, пульт 30 управления с интерфейсом, с которого оператор задает управляющее воздействие в экстренной ситуации, и аварийный блок 31 управления, соединенные с блоком коммутации.
Для более плавного управления открытием двухпозиционных пневмоклапанов управления РД 14 модуль дискретных сигналов ЭБУ 24 имеет ШИМ-модуль.
Работа системы управления включает следующие действия: получение ЭБУ 24 данных от ГП 25 о заданной ступени давления в пневмоцилиндрах ПП ВЗ; получение ЭБУ 24 сигналов от первого, второго и третьего датчиков давления; подачу управляющего сигнала от модуля дискретных сигналов ЭБУ 24 на электромагнит Э1 управления РД 14 ЭП БУК 13 для включения РД 14 и отсчет времени от момента подачи сигнала на электромагнит Э1 управления РД 14; открытие ТПК 7; контроль уровня давления в управляющей полости ТПК 7, регистрируемого первым датчиком давления, и регистрация времени достижения в пневмоцилиндрах 3 максимального давления ступени, заданной оператором ГП 25; контроль уровня давления в пневмолинии 2 на основе электрического сигнала, получаемого от датчика давления Д2; получение ЭБУ 24 информации от оператора ГП 25 о переходе к более высокой ступени давления в ПС ПЦ 3; увеличение мощности управляющего сигнала, подаваемого от модуля 27 дискретных сигналов ЭБУ 24 на первый электромагнит РД 14 и отсчет времени от момента подачи данного сигнала до достижения в пневмолинии 2 и пневмоцилиндрах 3 максимального давления, соответствующего более высокой ступени, заданной оператором; контроль уровня давления в воздухосборнике на основе электрического сигнала, получаемого от третьего датчика; получение ЭБУ 24 информации от ГП 25 о заданной более низкой ступени давления воздуха в пневмолинии 2 и пневмоцилиндрах 3; отключение электромагнита Э1 клапана управления 16 РД 14 от модуля 27 дискретных сигналов; подача управляющего сигнала от модуля 27 на электромагнит Э2 клапана управления 17 для отключения РД 14 и закрытия ТПК 7; подача управляющего сигнала от модуля 27 дискретных сигналов на электромагнит Э2 пневморас-пределителя, соединение управляющей полости РПК 10 с третьей пневмолинией под давлением от воздухосборника, открытие РПК 10 до достижения в пневмоцилиндрах давления заданной ГП 25 ступени; регистрацию контроллером ЭБУ 24 через заданный интервал времени уровня давления, получаемого от второго датчика давления; достижение давления заданной ступени в пневмоцилиндрах сбросом воздуха в атмосферу через открытый РПК 10, обезвоздушивание пневмоцилиндров 3; подачу команды от ЭБУ 24 на включение электромагнита первого двухпозиционного пневмораспределителя и отключение электромагнита второго двухпозиционного пневмораспределителя ЭП БУК, закрытие РПК 10; поступление команды от ГП 25 на ЭБУ 24 на последующее изменение давления в пневмоцилиндрах 3, после которой при получении задания от оператора ГП 25 о ступени давления воздуха в пневмоцилиндрах 3 контроллером ЭБУ 24 в соответствии с управляющей программой задается скорость  (ΔРПЛ _ приращение давления воздуха в главной пневмолинии 2 за интервал времени Δt) изменения давления воздуха в главной пневмолинии 2 и на основе показаний величины давления, измеряемого датчиком Д2 давления, вычисляются скорости изменения давления, измеряемого датчиком Д1 давления, в полости, управляющей открытием полости ТПК 7, и давления в главной пневмолинии 2, измеряемого датчиком Д2;
(ΔРПЛ _ приращение давления воздуха в главной пневмолинии 2 за интервал времени Δt) изменения давления воздуха в главной пневмолинии 2 и на основе показаний величины давления, измеряемого датчиком Д2 давления, вычисляются скорости изменения давления, измеряемого датчиком Д1 давления, в полости, управляющей открытием полости ТПК 7, и давления в главной пневмолинии 2, измеряемого датчиком Д2;
увеличение мощности управляющего сигнала, подаваемого на электромагнит Э1 управления РД 14 в случае, если за заданный период времени не достигнута заданная скорость изменения давления в главной пневмолинии 2; если при заданном оператором ГП 25 переходе к повышенной ступени давления воздуха в пневмоцилиндры 3 и вычисленной и заданной контроллером 26 ЭБУ 24 положительной скорости изменения давления в пневмоцилиндрах 3 (скорости повышения давления), меньшей заданной, то по команде от ЭБУ 24 увеличивается мощность управляющего сигнала, подаваемого на первый электромагнит РД 14, и, соответственно, открытие РД 14 и ТПК 7; при заданном оператором ГП 25 переходе к пониженной ступени давления воздуха в ПЦ 3 и вычисленной и заданной контроллером 26 ЭБУ 24 отрицательной скорости изменения давления  контроллер 26 ЭБУ 24 подает соответствующий управляющий сигнал на отключение электромагнита первого клапана РД 14 и включение электромагнита второго клапана РД 14 для закрытия ТПК 7, отключение электромагнита Э4 первого пневмораспределителя, подача сигнала на включение электромагнита Э3 второго пневмораспределителя для открытия РПК 10.
контроллер 26 ЭБУ 24 подает соответствующий управляющий сигнал на отключение электромагнита первого клапана РД 14 и включение электромагнита второго клапана РД 14 для закрытия ТПК 7, отключение электромагнита Э4 первого пневмораспределителя, подача сигнала на включение электромагнита Э3 второго пневмораспределителя для открытия РПК 10.
Для повышения точности управления ТПК 7 и РПК 10 имеют датчики положения 7а и 10а, определяющие регулируемую ЭБУ 24 величину L их открытия/закрытия, позволяя ЭБУ 24 сопоставлять достигнутую скорость  с расчетной программой в энергонезависимой памяти 26а ЭБУ 24 и корректировать (в зависимости выявленной разницы между измеренной скоростью
с расчетной программой в энергонезависимой памяти 26а ЭБУ 24 и корректировать (в зависимости выявленной разницы между измеренной скоростью  и рассчитанной) величину L открытия/закрытия ТПК 7 и РПК 10, после чего - сохранять в памяти 26а ЭБУ 24 скорректированную величину открытия/закрытия ТПК 7 и РПК 10 для соответствующей скорости
и рассчитанной) величину L открытия/закрытия ТПК 7 и РПК 10, после чего - сохранять в памяти 26а ЭБУ 24 скорректированную величину открытия/закрытия ТПК 7 и РПК 10 для соответствующей скорости  изменения давления воздуха в главной пневмолинии 5.
изменения давления воздуха в главной пневмолинии 5.
Для повышения плавности управления управляющие сигналы на электромагниты первого и второго пневмоклапанов РД 14 и электромагниты первого и второго пневмораспределителей могут быть заданы в виде набора импульсов, амплитуда, частота и скважность которых определяется программой контроллера 26 на основании показаний второго и первого датчиков давления.
Для достижения заявленного технического эффекта, - повышения точности управления величиной силы торможения колес вагона, создаваемой пневмоцилиндрами, а также снижение расхода воздуха при работе ВЗ, - функционирование устройства управления пневматическим приводом ВЗ выполняется в соответствии с программой, загружаемой в контроллер 26 или в энергонезависимую память 26а ЭБУ 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| Система и способ управления пневматическим приводом балочного вагонного замедлителя | 2023 |
|
RU2800782C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| ВОЗДУХОСБОРНИК С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ ПНЕВМАТИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2007 |
|
RU2368524C2 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2631126C2 |
| СПОСОБ ТОРМОЖЕНИЯ ЛОКОМОТИВА И КРАН ВСПОМОГАТЕЛЬНОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2444453C1 |
| Пневматический привод, система и способ управления пневматическим приводом | 2019 |
|
RU2718382C1 |
| СТЕНД ПРОВЕРКИ ИЗДЕЛИЙ НА ГЕРМЕТИЧНОСТЬ | 2022 |
|
RU2794414C1 |
Изобретение предназначено для использования на железнодорожном транспорте и относится к устройствам автоматики и телемеханики для управления вагонными замедлителями на сортировочных горках. Система управления пневматическим приводом вагонного замедлителя с приводимыми пневмоцилиндрами механизмами торможения правых и левых колес вагонного отцепа, с главной пневмолинией, соединяющей пневмоцилиндры, содержащая воздухосборник, подсоединенный к главной пневмолинии, по меньшей мере, одной пневмомагистралью, имеющей пневматический регулятор давления воздуха, состоящий из конструктивно идентичных тормозного и растормаживающего прямоточных клапанов; электропневматический блок управления клапанами пневматического регулятора давления, включающий регулятор давления воздуха, управляемый двумя пневмоклапанами с электромагнитами; датчики давления в главной пневмолинии, воздухосборнике и в управляющей полости тормозного клапана; датчики положения цилиндрических клапанов ТПК и РПК; пневмораспределители с электромагнитами, управляющие растормаживающим клапаном; блок коммутации; электронный блок с модулями аналоговых и дискретных сигналов управления электромагнитами, входы которого соединены через контроллер и блок коммутации с выходами управления от горочного поста; пульт оператора с интерфейсом. Технический результат - повышение точности управления величиной силы торможения колес вагона, а также снижение расхода воздуха при работе вагонного замедлителя. 1 з.п. ф-лы, 3 ил. 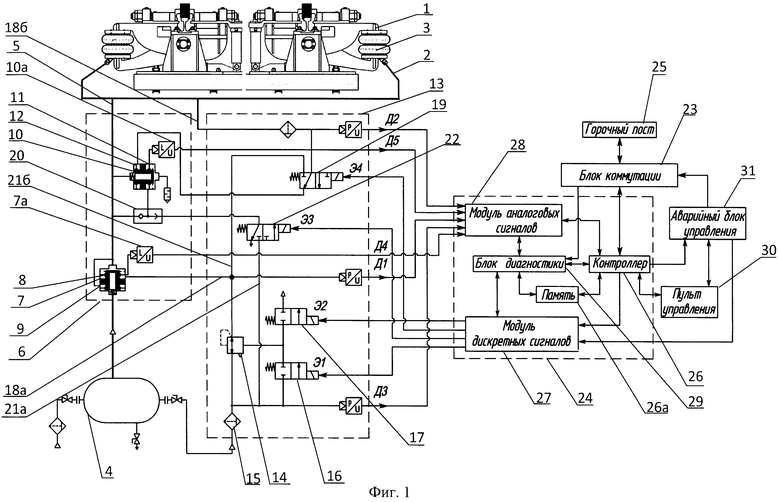
1. Система управления пневматическим приводом вагонного замедлителя с механизмами торможения правых и левых колес вагона (вагонного отцепа) с пневмоцилиндрами привода каждого механизма, с главной пневмолинией, соединяющей пневмоцилиндры механизмов торможения колес вагона, содержащая: воздухосборник, подсоединенный к главной пневмолинии, соединяющей пневмоцилиндры, по меньшей мере, одной пневмомагистралью, имеющей, по меньшей мере, один пневматический регулятор давления воздуха, поступающего из воздухосборника по пневмомагистрали и пневмолинии в пневмоцилиндры и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных, пневматически управляемых, имеющих неподвижные корпусные детали с седлом и подвижный цилиндрический клапан, контактирующий с седлом, тормозного прямоточного клапана, имеющего полость, управляющую его открытием, и полость, управляющую его закрытием, подсоединенную к пневмомагистрали за выходным патрубком, и растормаживающего прямоточного клапана, полость которого, управляющая его открытием, подсоединена к пневмомагистрали за патрубком тормозного прямоточного клапана через клапан «или» и к воздухосборнику через второй двухпозиционный пневмораспределитель с электромагнитным управлением и через третью пневмолинию для открытия растормаживающего прямоточного клапана или с атмосферой при закрытии растормаживающего прямоточного клапана, и полость, управляющую его закрытием; при этом вход растормаживающего прямоточного клапана соединен с пневмомагистралью за патрубком тормозного пневмоклапана, а выход - с атмосферой; электропневматический блок управления (ЭБУ) клапанами пневматического регулятора давления (ПРД), включающий регулятор давления воздуха, поступающего через фильтр из воздухосборника, управляемый двумя двухпозиционными пневмоклапанами с электромагнитным управлением; первую пневмолинию, соединяющую выходной патрубок регулятора давления с полостью, управляющей открытием тормозного прямоточного клапана, соединенную с пневматической полостью первого датчика давления; вторую пневмолинию, подсоединенную к главной пневмолинии и к пневматической части второго датчика давления и периодически соединяемую через первый двухпозиционный пневмораспределитель с электромагнитным управлением к полости, управляющей закрытием растормаживающего прямоточного клапана; третий датчик давления, пневматическая часть которого подсоединена к воздухосборнику; электрические выходы первого, второго и третьего датчиков давления соединены с модулем аналоговых сигналов электронного блока управления; блок коммутации, имеющий блок гальванических развязок и грозозащиты; электронный блок управления электромагнитами электропневматического блока управления клапанами, входы которого соединены через блок коммутации с выходами управления от горочного поста, состоящий из контроллера, энергонезависимой памяти, соединенных с контроллером модуля аналоговых сигналов, модуля дискретных сигналов, соединяемого с электромагнитами управления электропневматического блока управления клапанами; пульт оператора с интерфейсом; модуль дискретных сигналов электронного блока управления соединяется с электромагнитами управления клапанами регулятора давления электропневматического блока управления клапанами и первым и вторым электромагнитами пневмораспределителей, управляемыми в соответствии с программой, сохраняемой в блоке энергонезависимой памяти контроллера; блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, модулями аналоговых и дискретных сигналов; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту управления,
отличающаяся тем, что как тормозной, так и растормаживающий прямоточные клапаны, составляющие ПРД, имеют установленные в неподвижной корпусной детали датчики положения цилиндрического клапана относительно седла, электрически соединенные с модулем аналоговых сигналов ЭБУ.
2. Система по п. 1, отличающаяся тем, что модуль дискретных сигналов электронного блока управления имеет модуль широтно-импульсной модуляции.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА НЕЗАМЕРЗШЕЙ ВОДЫ ПРИ ОТРИЦАТЕЛЬНЫХ ТЕМПЕРАТУРАХ КОНСТРУКЦИЙ | 0 |
|
SU197233A1 |
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БАЛОЧНЫМ ВАГОННЫМ ЗАМЕДЛИТЕЛЕМ | 2017 |
|
RU2711405C1 |
| DE 19921649 C2, 23.11.2000 | |||
| US 6829998 B1, 14.12.2004. | |||

