Изобретение предназначено для использования на железнодорожном транспорте и относится к устройствам автоматики и телемеханики для управления вагонозамедлителями на сортировочных горках.
Известна система управления вагонным замедлителем (ПМ RU №87132 от 12.02.2008), включающая пневмомагистраль сжатого воздуха, пневмосеть вагонного замедлителя с датчиком давления, воздухосборник, соединенный с пневмомагистралью сжатого воздуха, блоки пневматически управляемых клапанов, через которые пневмосеть вагонного замедлителя соединена с воздухосборником, блок управления клапанами с электрическими входами и пневматическими выходами, соединенными с блоками пневматически управляемых клапанов, а также нагревательные элементы с устройством включения и датчиком температуры. Система управления включает микропроцессорный блок управления, содержащий устройство вода информации, связанное с пультом оператора, процессорное устройство, входы которого соединены с устройством ввода информации, с датчиком температуры через аналого-цифровой преобразователь, с датчиком давления воздуха в пневмосети вагонного замедлителя через аналого-цифровой преобразователь и управляемый узел задержки сигнала, а выходы через цифровые компараторы с изменяемым порогом соединены с электрическими входами блока управления клапанами и с устройством включения нагревательных элементов.
Система управления может включать связанный с процессорным устройством блок индикации текущих параметров системы, с расположением световых индикаторов на пульте оператора.
Известен программно-аппаратный модуль устройства управления прицельным торможением (ИМ RU №85432 от 02.04.2009), предназначенный для плавного управления тормозными средствами (вагонными замедлителями на сортировочных горках), состоящий из блока плавного управления, связанного с интерфейсом задания требуемого уровня воздействия и связанного через блок передачи сигналов управления и блок передачи сигналов обратной связи с исполнительными устройствами по линиям связи, при этом блок плавного управления выполнен в виде контроллера с возможностью поддержания заданного уровня воздействия за счет непосредственного управления исполнительными устройствами, блок передачи сигналов управления выполнен в виде оптоизолированного элемента вывода дискретных сигналов, а блок передачи сигналов обратной связи выполнен в виде гальванически изолированного аналого-цифрового преобразователя, связанного с датчиками измерения воздействия, установленного в исполнительном устройстве, при этом количество исполнительных устройств зависит от конфигурации и типа тормозного оборудования конкретной сортировочной горки.
Известно устройство для плавного управления вагонным замедлителем (патент на изобретение RU №2324615 от 30.05.2006), содержащее подключенные к тормозной воздушной магистрали вагонного замедлителя тормозные и оттормаживающие электропневмоклапаны и пневмоэлектрический преобразователь давления воздуха, подключенный к тормозной воздушной магистрали, дополнительно снабженное микропроцессорным модулем плавного изменения давления, подключенным к информационному интерфейсу задания требуемого уровня давления и связанным через гальванически изолированный преобразователь сигнала обратной связи с пневмоэлектрическим преобразователем давления воздуха, а также связанным с силовыми ключами управления электропневмоклапанами через дискретные каналы вывода сигналов управления электропневмоклапанами.
Недостаток вышеописанных известных устройств в том, что непосредственное электрическое управление тормозными и растормаживающими клапанами не позволяет осуществлять точное регулирование величины их открытия, что приводит к избыточному расходу воздуха при работе вагонных замедлителей.
Известен воздухосборник с автоматическим управлением пневматического вагонного замедлителя (патент на изобретение RU №2368524 от 04.04.2007), соединенный с одной стороны при помощи пневмомагистрали с воздушным компрессором, а с другой - с пневмосетью вагонного замедлителя через, по меньшей мере, один блок клапанов, содержащий, по меньшей мере, один тормозной клапан и, по меньшей мере, один растормаживающий клапан, при этом тормозной клапан соединяет воздухосборник с пневмосетью вагонного замедлителя, а растормаживающий клапан соединяет пневмосеть вагонного замедлителя с атмосферой, характеризующийся тем, что содержит электропневматический блок управления клапанами, подключенный при помощи дополнительного трубопровода к пневмомагистрали, делящий поток сжатого воздуха на рабочий и управляющий, с двумя электромагнитными катушками, который при поступлении электрического сигнала на одну из катушек обеспечивает проход для управляющего потока к тормозному клапану, а при поступлении электрического сигнала на другую катушку обеспечивает проход для управляющего потока к растормаживающему клапану, а для бесступенчатого регулирования давления сжатого воздуха в пневмосети вагонного замедлителя используется регулятор давления.
Недостаток данного устройства, служащего для пневматического привода вагонного замедлителя - в том, что в нем не раскрыты конструкции тормозного и растормаживающего клапанов, а клапаны, известные из предыдущих изобретений и полезных моделей, не позволяют осуществлять их плавное открытие и закрытие для исключения колебаний давления и силы торможения колес вагона, а также экономию воздуха при работе вагонных замедлителей.
Известен пневматический прямоточный клапан (патент RU №182505 от 17.11.2017), состоящий из корпуса в виде гильзы с внутренней полостью, образованной между гильзой и установленным в ней цилиндрическим клапаном с закрепленным на нем поршнем, делящим внутреннюю полость на две камеры; пружины, поджимающей цилиндрический клапан в направлении его закрытия к седлу; крышки с закрепленным в ней седлом с отверстиями на его периферии для протекания воздуха и с уплотнительным кольцом, взаимодействующим с цилиндрическим клапаном в закрытом положении; максимальный ход поршня превышает половину радиуса центрального канала цилиндрического клапана. В данной конструкции цилиндрический клапан незначительно нагружен силой пружины и силы от давления воздуха на торец клапана, прижимающего его к седлу при закрытом клапане и разгружается после открытия клапана в связи с действием давления на его противоположный торец.
Известна пневматическая тормозная система для железнодорожного транспорта (патент RU №2716393 от 27.07.2016), включающая связанные с колесами тормозные приводы в виде пневмоцилиндров, к которым подключены электропневматические блоки управления, каждый из которых имеет впускной и выпускной двухпозиционные трехходовые пневмоклапаны, управляемые электромагнитами, служащие для увеличения или уменьшения давления воздуха, подаваемого в пневматические цилиндры тормозных приводов. Пневматическая часть электропневматических блоков управления может быть подключена к регулятору давления. Тормозная система имеет блок управления электромагнитами двухпозиционных пневмоклапанов, который может задавать величину давления и время включения и выключения электромагнитов.
Недостаток данной тормозной системы - в небольшой мощности пневмоцилиндров, управляемых двухпозиционными пневмоклапанами с электромагнитным управлением.
Известен пневматический регулятор давления (заявка на изобретение WO №2019/186483 от 30.03.2018), имеющий нагрузочный и разгрузочный электромагнитные клапаны, соединяемые поочередно с надмембранной полостью пневматического клапана, регулирующего величину давления воздуха на выходе из подсоединенного к пневмолинии управления отверстия в корпусе клапана. Управление регулятором давления осуществляется от микропроцессора, к которому подсоединена электрическая часть датчика давления, пневматическая часть которого соединена с пневмолинией управления. Отличительной особенностью данного пневматического регулятора, что микропроцессор обеспечивает подачу на соленоид электромагнитного клапана заданной величины электрического сигнала управления, обеспечивающей заданное давление на выходе из отверстия в корпусе (в управляемой пневмолинии).
Известен пневматический привод, система и способ управления пневматическим приводом (патент на изобретение RU №2718382 от 07.10.2019).
Пневматический привод имеет главный пневмоцилиндр с корпусом, закрытым крышками, и с полостью внутри корпуса, с установленными в корпусе подвижными частями: с поршнем внутри корпуса, делящим полость главного пневмоцилиндра на левую и правую полости, с зубчатой рейкой, закрепленной на поршне с возможностью перемещения вместе с поршнем, с выходным валом, ось которого перпендикулярна оси главного пневмоцилиндра, и опирающимся на корпус главного пневмоцилиндра.
Описанным выше пневматическим приводом управляет присоединенная к нему система управления, содержащая источник давления воздуха, пневмомагистраль, соединенную с источником давления воздуха, с установленным в ней датчиком давления, первый двухпозиционный нормально закрытый пневмоклапан с электромагнитом, управляющий положением поршня главного пневмоцилиндра, вход которого присоединен к пневмомагистрали, а выход соединен с правой полостью главного пневмоцилиндра, соединяемой с атмосферой при выключенном электромагнитным управлением, второй двухпозиционный нормально закрытый пневмоклапан с электромагнитом, управляющий положением поршня главного пневмоцилиндра, вход которого подсоединен к пневмомагистрали, а выход - к левой полости главного пневмоцилиндра, соединяемой с атмосферой при выключенном электромагните; ЭБУ, электрически соединенный с возможностью передавать сигнал на электромагниты первого и второго пневмоклапанов через линии связи, с возможностью получать сигналы от датчиков.
Далее в описании использованы следующие сокращения:
БК - блок коммутации
ВЗ -вагонный замедлитель
ГП - горочный пост
Д - датчик давления
ПП - пневматический привод
ПРД - пневматический регулятор давления
ПЦ - пневмоцилиндр
РПК - растормаживающий прямоточный клапан
РД - регулятор давления
ТПК - тормозной прямоточный клапан
ШИМ - широтно-импульсная модуляция
Э - электромагнит
ЭБУ - электронный блок управления
ЭП БУК - электропневматический блок управления
Известно устройство пневматического привода и управления пневматическим приводом вагонного замедлителя (воздухосборник ВУПЗ-05Э, ДУВК.665212.001-01 РЭ), состоящее из ведущего воздухосборника с установленной на нем аппаратурой электропневмоуправления, включающей ПРД, состоящий из тормозного и растормаживающего клапанов, установленных в пневмомагистрали, соединяющей воздухосборник с пневмоцилиндрами пневматического привода вагонного замедлителя; электропневматический блок управления пневматическим регулятором давления, соединенный с воздухосборником; ЭБУ; БК, вход которого подсоединяется к выходам горочного поста, а выход БК соединен с ЭБУ; блок аппаратуры дистанционного контроля; блок грозозащиты.
Управление клапанами осуществляется командами с горочного поста, передаваемыми на ЭБУ через блок коммутации.
Для управления вагонным замедлителем (ВЗ) предусмотрены восемь режимов торможения и режим растормаживания. Для каждого из режимов предусмотрена установка нижнего и верхнего уровня давления, в пределах которых давление удерживается автоматически включением тормозных и растормаживающих клапанов.
Недостаток данного устройства пневматического привода и управления ВЗ-в том, что тормозные и растормаживающие клапаны ПРД не являются прямоточными, их подвижные клапаны прижимаются к седлу с большой силой, значительно уменьшающейся в момент открытия, что вызывает скачки давления воздуха в пневмомагистрали и пневмоцилиндрах ВЗ, а также колебания силы торможения колес и приводит к избыточному расходу воздуха. Следующий недостаток - пониженная точность управления величиной давления в пневмоприводе и, как следствие, повышенный расход воздуха на работу пневмопривода ВЗ.
Известно устройство управления пневматическим приводом вагонного замедлителя (патент на изобретение RU №2689468 от 17.11.2017), имеющего механизмы с пневмоцилиндрами торможения правых и левых колес вагона, каждый пневмоцилиндр пневмопривода которого соединен пневмомагистралями с воздухосборником под давлением, содержащее установленный в пневмомагистрали прямоточный тормозной клапан, вход которого подсоединен к воздухосборнику, а выход - к пневмоцилиндру вагонозамедлителя, управляемый от поршневого пневмоцилиндра, поршень которого делит пневмоцилиндр тормозного клапана на первую и вторую управляющую полости; растормаживающий клапан, конструктивно идентичный тормозному клапану, установленный в каждой пневмомагистрали, вход которого подсоединен к участку пневмомагистрали между выходом тормозного клапана и пневмоцилиндром вагонозамедлителя, а выход соединен с атмосферой; электропневматический блок управления тормозным и растормаживающим клапанами, имеющий: первый пневмоклапан с электропневматическим управлением, вход которого соединен через воздушный фильтр с воздухосборником, а выход - с первыми управляющими полостями поршневых пневмоцилиндров тормозных клапанов, второй пневмоклапан с электропневматическим управлением, вход которого соединен через воздушный фильтр с воздухосборником, а выход - с первыми управляющими полостями поршневых пневмоцилиндров растормаживающих клапанов; электронный блок управления первым и вторым пневмоклапанами, имеющий интерфейс пользователя; комплекс пневмоэлектрических датчиков давления, электрическая часть которых подсоединена к электронному блоку, включающий: первый датчик давления, подсоединенный к участку пневмомагистрали между выходом тормозного клапана вагонного замедлителя, электрическая часть которого соединена с электронным блоком управления, второй датчик давления воздуха, присоединенный к управляющим полостям тормозных клапанов, третий датчик давления воздуха подсоединен к воздухосборнику, электрические части первого, второго и третьего датчиков подсоединены к электронному блоку управления.
Недостаток известного устройства - в том, что в нем не раскрыта структура электронного блока управления, которая бы обеспечила повышение точности управления давлением воздуха и, соответственно, величиной создаваемой пневмоцилиндрами силы торможения колес вагона, а также снижение расхода воздуха при работе вагонного замедлителя.
Техническая задача, решаемая изобретением, - повышение точности управления величиной силы торможения колес вагона, создаваемой пневмоцилиндрами, а также снижение расхода воздуха при работе вагонного замедлителя.
Техническая задача решена в системе управления ПП ВЗ с механизмами торможения правых и левых колес вагона (вагонного отцепа) с пневмоцилиндрами привода каждого механизма, с главной пневмолинией, соединяющей пневмоцилиндры механизмов торможения колес вагона, содержащая: воздухосборник, подсоединенный к главной пневмолинии, соединяющей пневмоцилиндры, по меньшей мере, одной пневмомагистралью, имеющей, по меньшей мере, один пневматический регулятор давления воздуха, поступающего из воздухосборника по пневмомагистрали и пневмолинии в пневмоцилиндры и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных пневматически управляемых тормозного прямоточного клапана, имеющего полость, управляющую его открытием, и полость, управляющую его закрытием, подсоединенную к пневмомагистрали за выходным патрубком, и растормаживающего прямоточного клапана, имеющего полость, управляющую его открытием, и полость, управляющую его закрытием; при этом вход растормаживающего пневмоклапана соединен с пневмомагистралью за патрубком тормозного пневмоклапана, а выход - с атмосферой; электропневматический блок управления клапанами пневматического регулятора давления, включающий регулятор давления воздуха, поступающего через фильтр из воздухосборника, управляемый двумя двухпозиционными пневмоклапанами с электромагнитным управлением; первую пневмолинию, соединяющую выходной патрубок регулятора давления с полостью, управляющей открытием тормозного прямоточного клапана, соединенную с пневматической полостью первого датчика давления; вторую пневмолинию, подсоединенную к главной пневмолинии и к пневматической части второго датчика давления и периодически соединяемую через первый двухпозиционный пневмораспределитель с электромагнитным управлением к полости, управляющей закрытием растормаживающего прямоточного клапана; третий датчик давления, пневматическая часть которого подсоединена к воздухосборнику; блок коммутации, имеющий блок гальванических развязок и грозозащиты; электронный блок управления электромагнитами электропневматического блока управления клапанами, входы которого соединены через блок коммутации с выходами управления от горочного поста, состоящий из контроллера, энергонезависимой памяти, соединенных с контроллером модуля аналоговых сигналов, модуля дискретных сигналов, соединяемого с электромагнитами управления электропневматического блока управления клапанами; пульт оператора с интерфейсом, при этом полость, управляющая открытием растормаживающего прямоточного клапана, подсоединена к пневмомагистрали за патрубком тормозного прямоточного клапана через клапан «или» и к воздухосборнику через второй двухпозиционный пневмораспределитель с электромагнитным управлением и через третью пневмолинию для открытия растормаживающего прямоточного клапана или с атмосферой при закрытии растормаживающего прямоточного клапана; первый, второй и третий датчики давления соединены с модулем аналоговых сигналов электронного блока управления; модуль дискретных сигналов электронного блока управления соединяется с электромагнитами управления клапанами регулятора давления электропневматического блока управления клапанами и первым и вторым электромагнитами пневмораспределителей, управляемыми в соответствии с программой, сохраняемой в блоке энергонезависимой памяти контроллера; блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, модулями аналоговых и дискретных сигналов; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту управления.
Для более плавного управления открытием двухпозиционных пневмоклапанов управления РД модуль дискретных сигналов ЭБУ имеет ШИМ-модуль.
Для ускорения растормаживания к пневмомагистрали за патрубком ТПК подсоединен дополнительный РПК, полости которого, управляющие его открытием и закрытием, соединены с соответствующими полостями основного РПК.
Для ускорения торможения воздухосборник подсоединен к пневмолинии двумя пневмомагистралями, каждая из которых имеет ПРД, управляющие полости ТПК и РПК которых попарно соединены между собой.
Для ускорения торможения и растормаживания к каждой пневмомагистрали за выходным патрубком ТПК подсоединен дополнительный РПК, при этом полости РПК обеих пневмомагистралей, управляющие открытием и закрытием клапанов, соединены между собой.
Техническая задача решается при способе управления вышеописанной системой ПП ВЗ, включающем: получение электронным блоком данных от горочного поста о заданной ступени давления в пневмоцилиндрах пневматического привода вагонного замедлителя и интервала времени на достижение заданного максимального для данного интервала давления; получение электронным блоком управления сигналов от первого, второго и третьего датчиков давления; подачу управляющего сигнала от модуля дискретных сигналов электронного блока управления на первый электромагнит управления регулятора давления электропневматического блока управления клапанами для включения регулятора давления и отсчет времени от момента подачи сигнала на первый электромагнит управления регулятора давления, открытие тормозного прямоточного клапана; контроль уровня давления в управляющей полости тормозного прямоточного клапана, регистрируемого первым датчиком давления, и регистрация времени достижения в пневмоцилиндре максимального давления ступени, заданной оператором горочного поста; контроль уровня давления в главной пневмолинии на основе электрического сигнала, получаемого от второго датчика давления; получение электронным блоком управления от оператора горочного поста информации о переходе к более высокой ступени давления в пневмомагистрали; увеличение мощности управляющего сигнала, подаваемого от модуля дискретных сигналов электронного блока управления на первый электромагнит регулятора давления электропневматического блока управления клапанами и отсчет времени от момента подачи данного сигнала до достижения в пневмомагистрали максимального давления, соответствующего более высокой ступени, заданной оператором; контроль уровня давления в воздухосборнике на основе электрического сигнала, получаемого от третьего датчика; получение электронным блоком управления информации от оператора горочного поста о заданной более низкой ступени давления в пневмомагистрали; отключение первого электромагнита клапана управления регулятора давления от модуля дискретных сигналов и подача управляющего сигнала от модуля дискретных сигналов на второй электромагнит клапана управления для отключения регулятора давления и закрытия тормозного прямоточного клапана; подача управляющего сигнала от модуля дискретных сигналов на электромагнит второго пневмораспределителя; соединение управляющей полости растормаживающего прямоточного клапана с третьей пневмолинией, соединенной с воздухосборником; открытие растормаживающего прямоточного клапана до достижения в пневмолинии минимального давления в интервале заданной оператором горочного поста ступени; регистрация через заданный интервал времени контроллером электронного блока управления уровня давления, получаемого от второго датчика давления; достижение в пневмомагистрали минимального давления заданной ступени сбросом воздуха в атмосферу через открытый растормаживающий прямоточный клапан; снижение давление в пневмомагистрали до атмосферного; подачу команды от электронного блока управления на включение электромагнита первого двухпозиционного пневмораспределителя и отключение электромагнита второго двухпозиционного пневмораспределителя электропневматического блока управления клапанами; закрытие растормаживающего прямоточного клапана; поступление команды от горочного поста на электронный блок управления на последующее изменение давления в пневмомагистрали, при этом при получении задания о ступени давления воздуха в пневмомагистрали от оператора горочного поста контроллером электронного блока управления в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали и на основе показаний первого и второго датчиков давления вычисляются скорости изменения давления в управляющей полости тормозного прямоточного клапана и в пневмомагистрали; если за заданный интервал времени открытия тормозного прямоточного клапана не достигнута заданная скорость изменения давления в пневмомагистрали, то производится увеличение мощности управляющего сигнала, подаваемого на первый электромагнит управления регулятора давления; если при заданном оператором горочного поста переходе к повышенной ступени давления воздуха в пневмомагистрали и пневмоцилиндрах и вычисленной контроллером электронного блока управления положительной скорости изменения давления в пневмомагистрали, меньшей заданной, то по команде от электронного блока управления увеличивается мощность управляющего сигнала, подаваемого на первый электромагнит регулятора давления, величина открытия регулятора давления и тормозного прямоточного клапана; при заданном оператором горочного поста переходе к пониженной ступени давления воздуха в пневмомагистрали и при вычисленной контроллером электронного блока управления положительной или нулевой скорости изменения давления при закрытом тормозном прямоточном клапане для открытия растормаживающего прямоточного клапана контроллер электронного блока управления подает управляющий сигнал на отключение электромагнита первого пневмораспределителя и включение электромагнита второго пневмораспределителя.
Для повышения плавности управления управляющие сигналы на электромагниты первого и второго пневмоклапанов РД и электромагниты первого и второго пневмораспределителей могут быть заданы в виде набора импульсов, амплитуда, частота и скважность которых определяется программой контроллера на основании показаний датчиков давления.
Для ускорения работы электропневматического регулятора давления и двухпозиционного клапана способ выполняется в соответствии с программой, загружаемой в контроллер или в энергонезависимую память ЭБУ для исполнения действий в соответствии с заданным алгоритмом.
Достижение технического эффекта:
- повышение точности управления величиной силы торможения колес вагона, создаваемой пневмоцилиндрами, а также снижение расхода воздуха при работе вагонного замедлителя,
- обеспечивается следующей совокупностью отличительных признаков системы управления:
- полость, управляющая открытием растормаживающего прямоточного клапана, подсоединена к пневмомагистрали за патрубком тормозного прямоточного клапана через клапан «или» и к воздухосборнику через второй двухпозиционный пневмораспределитель с электромагнитным управлением и через третью пневмолинию для открытия растормаживающего прямоточного клапана или с атмосферой при закрытии растормаживающего прямоточного клапана; первый, второй и третий датчики давления соединены с модулем аналоговых сигналов электронного блока управления; модуль дискретных сигналов электронного блока управления соединяется с электромагнитами управления клапанами регулятора давления электропневматического блока управления клапанами и первым и вторым электромагнитами пневмораспределителей, управляемыми в соответствии с программой, сохраняемой в блоке энергонезависимой памяти контроллера; блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, модулями аналоговых и дискретных сигналов; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту управления;
а также совокупностью отличительных признаков способа управления:
- при получении задания о ступени давления воздуха в пневмомагистрали от оператора горочного поста контроллером электронного блока управления в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали, и на основе показаний первого и второго датчиков давления вычисляются скорости изменения давления в управляющей полости тормозного прямоточного клапана и в пневмомагистрали; если за заданный интервал времени открытия тормозного прямоточного клапана не достигнута заданная скорость изменения давления в пневмомагистрали, то производится увеличение мощности управляющего сигнала, подаваемого на первый электромагнит управления регулятора давления; если при заданном оператором горочного поста переходе к повышенной ступени давления воздуха в пневмомагистрали и пневмоцилиндрах и вычисленной контроллером электронного блока управления положительной скорости изменения давления в пневмомагистрали, меньшей заданной, то по команде от электронного блока управления увеличивается мощность управляющего сигнала, подаваемого на первый электромагнит регулятора давления, величина открытия регулятора давления и тормозного прямоточного клапана; при заданном оператором горочного поста переходе к пониженной ступени давления воздуха в пневмомагистрали и при вычисленной контроллером электронного блока управления положительной или нулевой скорости изменения давления при закрытом тормозном прямоточном клапане для открытия растормаживающего прямоточного клапана контроллер электронного блока управления подает управляющий сигнал на отключение электромагнита первого пневмораспределителя и включение электромагнита второго пневмораспределителя.
Приведенные выше совокупности отличительных признаков устройства и способа не обнаружены в процессе патентно-информационного поиска, следовательно, технические решения, относящиеся к устройству и способу, соответствуют критерию «новизна». Они также не следуют явно из уровня техники, следовательно, они соответствуют критерию «изобретательский уровень».
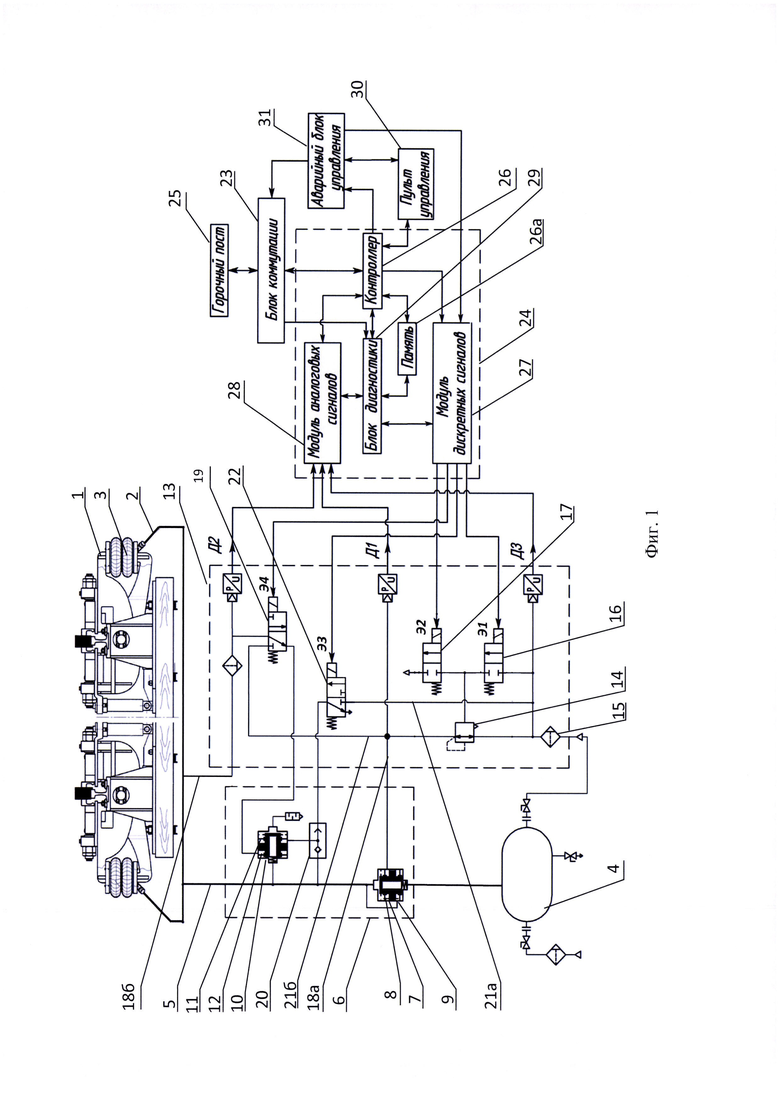
На фиг. 1 показана блок-схема системы управления пневматическим приводом вагонного замедлителя, имеющей один ПРД.
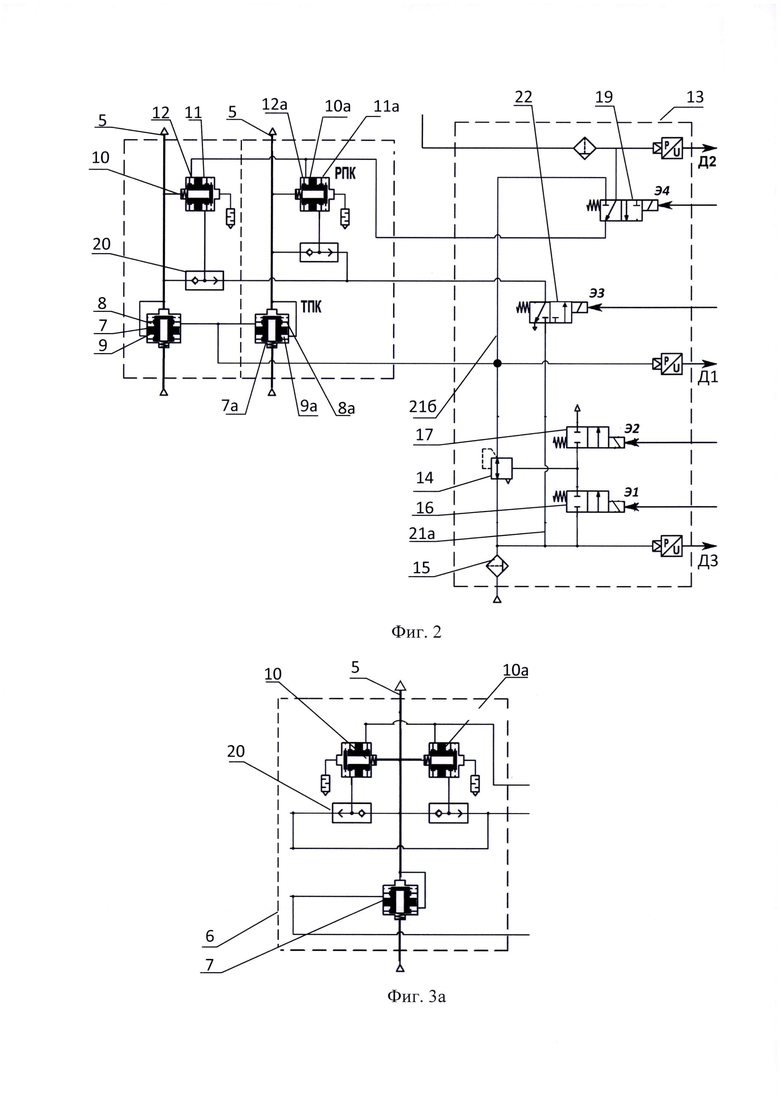
На фиг. 2 - схема блока, состоящего из двух ПРД, установленных в двух пневмомагистралях системы управления пневматическим приводом ВЗ.
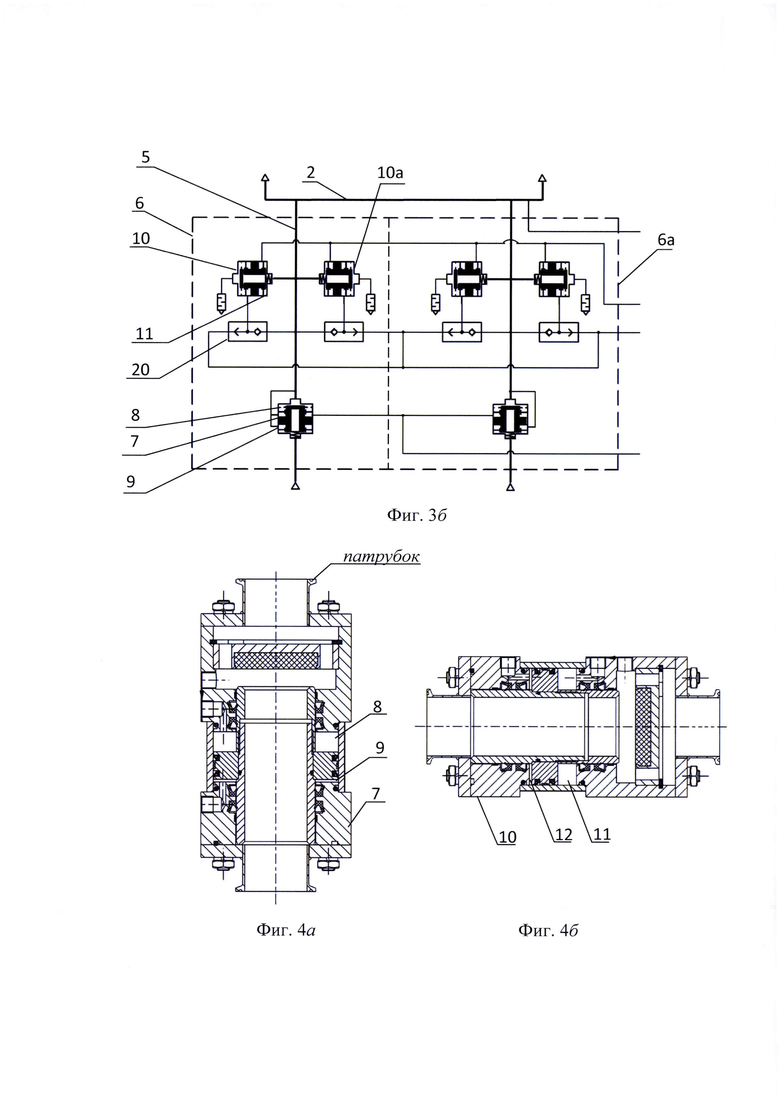
На фиг. 3 - схема блока, состоящего из двух ПРД, с двумя РПК каждый, установленных в двух пневмомагистралях.
На фиг. 4а - тормозной пневматический прямоточный клапан (ТПК), показанный на фиг. 1-3.
На фиг. 4б - растормаживающий пневматический прямоточный клапан (РПК), показанный на фиг. 1-3.
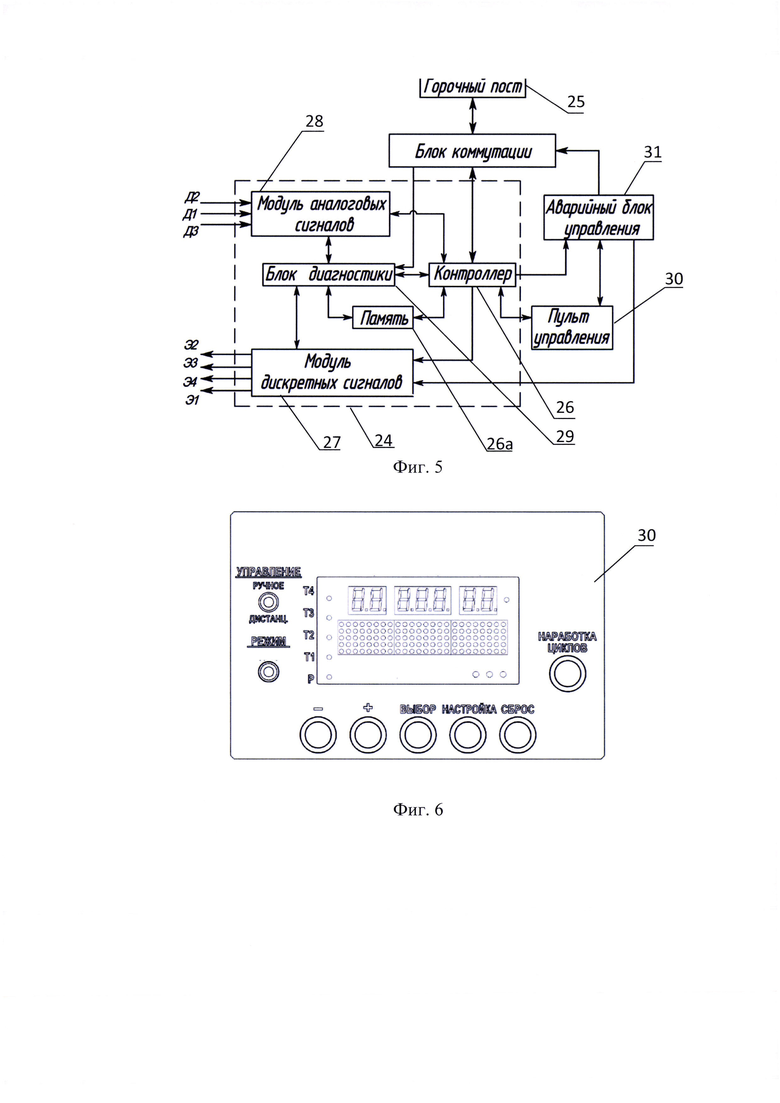
На фиг. 5 - схема электронного блока управления (ЭБУ).
На фиг. 6 показан пульт оператора вагонного замедлителя (ВЗ).
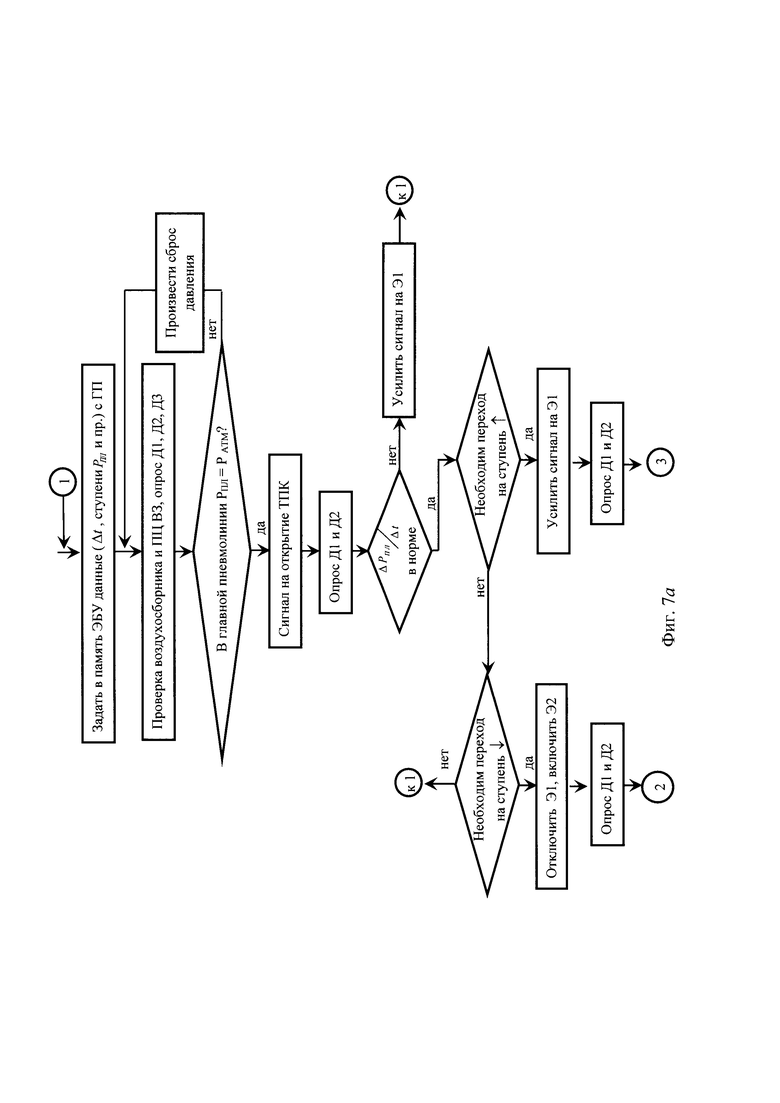
На фиг. 1a и b приведен алгоритм управления пневматическим приводом ВЗ для этапов торможения и растормаживания.
Обозначения, приятые на фиг. 1-6:
1 - механизмы торможения;
2 - главная пневмолиния;
3 - пневмоцилиндры;
4 - воздухосборник;
5 - пневмомагистраль;
6 - регулятор давления;
7 - тормозной прямоточный клапан;
8 - полость, управляющая открытием тормозного прямоточного клапана;
9 - полость, управляющая закрытием тормозного прямоточного клапана;
10 - растормаживающий прямоточный клапан;
11 - полость, управляющая открытием растормаживающего прямоточного клапана;
12 - полость, управляющая закрытием растормаживающего прямоточного клапана;
13 - электропневматический блок управления пневмоклапанами;
14 - регулятор давления;
15 - фильтр;
16 - двухпозиционный пневмоклапан;
17 - двухпозиционный пневмоклапан;
8а - первая пневмолиния;
18б - вторая пневмолиния
19 - первый пневмораспределитель;
20 - клапан «или»;
21а - третья пневмолиния;
21б - четвертая пневмолиния;
22 - второй пневмораспределитель;
23 - блок коммутации;
24 - электронный блок управления электромагнитами;
25 - горочный пост;
26 - контроллер;
26а - энергонезависимая память контроллера;
27 - модуль дискретных сигналов;
28 - модуль аналоговых сигналов;
29 - блок диагностики;
30 - пульт управления с интерфейсом;
31 - аварийный блок управления.
Система управления ПП ВЗ (фиг. 1-6) с механизмами 1 торможения правых и левых колес вагона (вагонного отцепа) с пневмолинией 2, соединяющей пневмоцилиндры 3 привода каждого механизма 1, содержащая воздухосборник 4, подсоединенный к пневмолинии 2, по меньшей мере, одной пневмомагистралью 5, имеющей, по меньшей мере, один ПРД 6 воздуха, поступающего из воздухосборника 4 по пневмомагистрали 5 и пневмолинии 2 в пневмоцилиндры 3 и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных пневматически управляемых ТПК 7 (фиг. 4), имеющего полость 8, управляющую его открытием, и полость 9, управляющую его закрытием, подсоединенную за выходным патрубком ТПК 7 к главной пневмомагистрали 5, и РПК 10, имеющего полость 11, управляющую его открытием, и полость 12, управляющую его закрытием; при этом вход РПК 10 соединен с главной пневмомагистралью 5 за патрубком ТПК 7, а выход - с атмосферой; ЭП БУК 13, включающий РД 14 воздуха, поступающего через фильтр 15 от воздухосборника 4, управляемый двумя двухпозиционными пневмоклапанами 16, 17 с электромагнитным управлением (Э1 и Э2 соответственно); первую пневмолинию 18а, соединяющую выходной патрубок РД 14 с полостью 8, управляющей открытием ТПК 7, соединенную с пневматической полостью первого датчика Д1 давления; вторую пневмолинию 18б, подсоединенную к главной пневмолинии 2 и к пневматической части второго датчика Д2 давления (датчик Д2 может быть подсоединен второй пневмолинией 18б к пневмомагистрали 5 перед главной пневмолинией 2, а также к любому ПЦ 3) и периодически соединяемую через первый двухпозиционный пневмораспределитель 19 управляемый электромагнитом Э4 к полости 12, управляющей закрытием РПК 10; третий датчик ДЗ давления, пневматическая часть которого подсоединена к воздухосборнику 4; полость 11, управляющая открытием РПК 10 ПРД 6, подсоединена к пневмомагистрали 5 за патрубком ТПК 7 через клапан 20 «или» и к воздухосборнику 4 через третью пневмолинию 21а и второй двухпозиционный пневмораспределитель 22, управляемый электромагнитом Э3, включаемым для открытия РПК 10 и выключаемым для соединения полости 11 с атмосферой при закрытии РПК 10; при этом полость 12, управляющая закрытием РПК 10, соединяется через первый двухпозиционный пневмораспределитель 19 четвертой пневмолинией 21б с первой пневмолинией 18а для закрытия РПК 10; БК 23, имеющий блок гальванических развязок и грозозащиты; ЭБУ 24, управляющий электромагнитами ЭП БУК, соединенный с выходами управления от горочного поста 25 состоящий из контроллера 26, энергонезависимой памяти 26а, модуля 27 дискретных сигналов, соединенного с электромагнитами с электромагнитами Э1, Э2, Э3, Э4 и модуля 28 аналоговых сигналов, соединенного с электрическими выходами датчиков Д1, Д2, Д3, с контроллером 26; а также соединенные с контроллером 26 блок 29 диагностики, пульт 30 управления с интерфейсом, с которого оператор задает управляющее воздействие в экстренной ситуации, и аварийный блок 31 управления, соединенные с блоком коммутации.
Для более плавного управления открытием двухпозиционных пнев-моклапанов управления РД 14 модуль дискретных сигналов ЭБУ 24 имеет ШИМ-модуль.
Для ускорения растормаживания к главной пневмомагистрали 5 за патрубком ТПК 7 подсоединен дополнительный РПК 10а (фиг. 2), полости 11а и 12а которого, управляющие его открытием и закрытием, соединены с соответствующими полостями РПК 10.
Для ускорения торможения воздухосборник 4 подсоединен к пневмолинии двумя пневмомагистралями (фиг. 2, 3), каждая из которых имеет ПРД 6а (фиг. 2), ПРД 6б (фиг. 3), управляющие полости ТПК и РПК которых попарно соединены между собой.
Для ускорения торможения и растормаживания к каждой пневмомагистрали за выходным патрубком ТПК 7 подсоединен дополнительный РПК 106, при этом полости 11 и На РПК 10, 10а обеих пневмомагистралей, управляющие открытием клапанов, и полости 12, 12а, управляющие закрытием клапанов, соединены между собой.
Способ управления ПП ВЗ включает следующие действия (фиг. 1, 7а, 1b): получение ЭБУ 24 данных от ГП 25 о заданной ступени давления в пневмоцилиндрах ПП ВЗ; получение ЭБУ 24 сигналов от первого, второго и третьего датчиков давления; подачу управляющего сигнала от модуля дискретных сигналов ЭБУ 24 на электромагнит Э1 управления РД 14 ЭП БУК 13 для включения РД 14 и отсчет времени от момента подачи сигнала на электромагнит Э1 управления РД 14; открытие ТПК 7; контроль уровня давления в управляющей полости ТПК 7, регистрируемого первым датчиком давления, и регистрация времени достижения в пневмоцилиндрах 3 максимального давления ступени, заданной оператором ГП 25; контроль уровня давления в пневмолинии 2 на основе электрического сигнала, получаемого от датчика давления Д2;
получение ЭБУ 24 информации от оператора ГП о переходе к более высокой ступени давления в ПС ПЦ 3; увеличение мощности управляющего сигнала, подаваемого от модуля 27 дискретных сигналов ЭБУ 24 на первый электромагнит РД 14 и отсчет времени от момента подачи данного сигнала до достижения в пневмолинии 2 и пневмоцилиндрах 3 максимального давления, соответствующего более высокой ступени, заданной оператором; контроль уровня давления в воздухосборнике на основе электрического сигнала, получаемого от третьего датчика;
получение ЭБУ 24 информации от горочного поста о заданной более низкой ступени давления воздуха в пневмолинии 2 и пневмоцилиндрах 3; отключение электромагнита Э1 клапана управления 16 РД 14 от модуля 27 дискретных сигналов; подача управляющего сигнала от модуля 27 на электромагнит Э2 клапана управления 17 для отключения РД 14 и закрытия ТПК 7; подача управляющего сигнала от модуля 27 дискретных сигналов на электромагнит Э2 пневмораспределителя, соединение управляющей полости РПК 10 с третьей пневмолинией под давлением от воздухосборника, открытие РПК 10 до достижения в пневмоцилиндрах давления заданной ГП ступени; регистрацию контроллером ЭБУ 24 через заданный интервал времени уровня давления, получаемого от второго датчика давления; достижение давления заданной ступени в пневмоцилиндрах сбросом воздуха в атмосферу через открытый РПК 10, обезвоздушивание пневмоцилиндров 3; подачу команды от ЭБУ 24 на включение электромагнита первого двухпозиционного пневмораспределителя и отключение электромагнита второго двухпозиционного пневмораспределителя ЭП БУК, закрытие РПК 10; поступление команды от горочного поста на ЭБУ 24 на последующее изменение давления в пневмоцилиндрах 3, поел е которой при получении задания от оператора ГП 25 о ступени давления воздуха в пневмоцилиндрах 3 контроллером ЭБУ 24 в соответствии с управляющей программой задается скорость  (ΔрПЛ приращение давления воздуха в главной пневмолинии 2 за интервал времени Δt) изменения давления воздуха в главной пневмолинии 2 и на основе показаний величины давления, измеряемого датчиком Д2 давления, вычисляются скорости изменения давления, измеряемого датчиком Д1 давления, в полости, управляющей открытием полости ТПК 7, и давления в главной пневмолинии 2, измеряемого датчиком Д2; увеличение мощности управляющего сигнала, подаваемого на электромагнит Э1 управления РД 14 в случае, если за заданный период времени не достигнута заданная скорость изменения давления в главной пневмолинии 2; если при заданном оператором ГП 25 переходе к повышенной ступени давления воздуха в пневмоцилиндры 3 и вычисленной и заданной контроллером 26 ЭБУ 24 положительной скорости изменения давления в пневмоцилиндрах 3 (скорости повышения давления), меньшей заданной, то по команде от ЭБУ 24 увеличивается мощность управляющего сигнала, подаваемого на первый электромагнит РД 14, и, соответственно, открытие РД 14 и ТПК 7; при заданном оператором ГП 25 переходе к пониженной ступени давления воздуха в ПЦ 3 и вычисленной и заданной контроллером 26 ЭБУ 24 отрицательной скорости изменения давления
(ΔрПЛ приращение давления воздуха в главной пневмолинии 2 за интервал времени Δt) изменения давления воздуха в главной пневмолинии 2 и на основе показаний величины давления, измеряемого датчиком Д2 давления, вычисляются скорости изменения давления, измеряемого датчиком Д1 давления, в полости, управляющей открытием полости ТПК 7, и давления в главной пневмолинии 2, измеряемого датчиком Д2; увеличение мощности управляющего сигнала, подаваемого на электромагнит Э1 управления РД 14 в случае, если за заданный период времени не достигнута заданная скорость изменения давления в главной пневмолинии 2; если при заданном оператором ГП 25 переходе к повышенной ступени давления воздуха в пневмоцилиндры 3 и вычисленной и заданной контроллером 26 ЭБУ 24 положительной скорости изменения давления в пневмоцилиндрах 3 (скорости повышения давления), меньшей заданной, то по команде от ЭБУ 24 увеличивается мощность управляющего сигнала, подаваемого на первый электромагнит РД 14, и, соответственно, открытие РД 14 и ТПК 7; при заданном оператором ГП 25 переходе к пониженной ступени давления воздуха в ПЦ 3 и вычисленной и заданной контроллером 26 ЭБУ 24 отрицательной скорости изменения давления  контроллер 26 ЭБУ 24 подает соответствующий управляющий сигнал на отключение электромагнита первого клапана РД 14 и включение электромагнита второго клапана РД 14 для закрытия ТПК 7, отключение электромагнита Э4 первого пневмораспределителя, подача сигнала на включение электромагнита Э3 второго пневмораспределителя для открытия РПК 10.
контроллер 26 ЭБУ 24 подает соответствующий управляющий сигнал на отключение электромагнита первого клапана РД 14 и включение электромагнита второго клапана РД 14 для закрытия ТПК 7, отключение электромагнита Э4 первого пневмораспределителя, подача сигнала на включение электромагнита Э3 второго пневмораспределителя для открытия РПК 10.
Для повышения плавности управления управляющие сигналы на электромагниты первого и второго пневмоклапанов РД 14 и электромагниты первого и второго пневмораспределителей могут быть заданы в виде набора импульсов, амплитуда, частота и скважность которых определяется программой контроллера 26 на основании показаний второго и первого датчиков давления.
Для достижения заявленного технического эффекта - повышение точности управления величиной силы торможения колес вагона, создаваемой пневмоцилиндрами, а также снижение расхода воздуха при работе вагонного замедлителя - функционирование устройства управления пневматическим приводом вагонного замедлителя выполняется в соответствии с программой, загружаемой в контроллер 26 или в энергонезависимую память 26а ЭБУ 24 для исполнения действий в соответствии с заданным алгоритмом (фиг. 1а, 1б).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| Система и способ управления пневматическим приводом балочного вагонного замедлителя | 2023 |
|
RU2800782C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| ВОЗДУХОСБОРНИК С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ ПНЕВМАТИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2007 |
|
RU2368524C2 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2631126C2 |
| СПОСОБ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУХОРАСПРЕДЕЛИТЕЛЕМ ГРУЗОВОГО ВАГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2608191C2 |
| ТОРМОЗНОЕ ОБОРУДОВАНИЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749551C1 |
| Вагонный замедлитель, система и способ управления вагонным замедлителем | 2023 |
|
RU2808315C1 |

Изобретение предназначено для использования на железнодорожном транспорте и относится к устройствам автоматики и телемеханики для управления вагонозамедлителями на сортировочных горках. Система управления пневматическим приводом вагонного замедлителя с приводимыми пневмоцилиндрами механизмами торможения правых и левых колес вагонного отцепа, с главной пневмолинией, соединяющей пневмоцилиндры, содержит воздухосборник, подсоединенный к главной пневмолинии, по меньшей мере, одной пневмомагистралью, имеющей пневматический регулятор давления воздуха, состоящий из конструктивно идентичных тормозного и растормаживающего прямоточных клапанов; электропневматический блок управления клапанами пневматического регулятора давления, включающий регулятор давления воздуха, управляемый двумя пневмоклапанами с электромагнитами; датчики давления в главной пневмолинии, воздухосборнике и в управляющей полости тормозного клапана; пневмораспределители с электромагнитами, управляющие растормаживающим клапаном; блок коммутации; электронный блок с модулями аналоговых и дискретных сигналов управления электромагнитами, входы которого соединены через контроллер и блок коммутации с выходами управления от горочного поста; пульт оператора с интерфейсом. Способ управления описанной системой пневматического привода вагонного замедлителя реализуется в соответствии с программой, загружаемой в контроллер или в энергонезависимую память электронного блока управления для исполнения действий в соответствии с заданным алгоритмом. Технический результат - обеспечение повышения точности управления величиной силы торможения колес вагона, а также снижение расхода воздуха при работе вагонного замедлителя. 2 н. и 6 з.п. ф-лы, 10 ил.
1. Система управления пневматическим приводом вагонного замедлителя с механизмами торможения правых и левых колес вагона (вагонного отцепа) с пневмоцилиндрами привода каждого механизма, с главной пневмолинией, соединяющей пневмоцилиндры механизмов торможения колес вагона, содержащая: воздухосборник, подсоединенный к главной пневмолинии, соединяющей пневмоцилиндры, по меньшей мере, одной пневмомагистралью, имеющей, по меньшей мере, один пневматический регулятор давления воздуха, поступающего из воздухосборника по пневмомагистрали и пневмолинии в пневмоцилиндры и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных пневматически управляемых тормозного прямоточного клапана, имеющего полость, управляющую его открытием, и полость, управляющую его закрытием, подсоединенную к пневмомагистрали за выходным патрубком, и растормаживающего прямоточного клапана, имеющего полость, управляющую его открытием, и полость, управляющую его закрытием; при этом вход растормаживающий пневмоклапан соединен с пневмомагистралью за патрубком тормозного пневмоклапана, а выход - с атмосферой; электропневматический блок управления клапанами пневматического регулятора давления, включающий регулятор давления воздуха, поступающего через фильтр из воздухосборника, управляемый двумя двухпозиционными пневмоклапанами с электромагнитным управлением; первую пневмолинию, соединяющую выходной патрубок регулятора давления с полостью, управляющей открытием тормозного прямоточного клапана, соединенную с пневматической полостью первого датчика давления; вторую пневмолинию, подсоединенную к главной пневмолинии и к пневматической части второго датчика давления и периодически соединяемую через первый двухпозиционный пневмораспределитель с электромагнитным управлением к полости, управляющей закрытием растормаживающего прямоточного клапана; третий датчик давления, пневматическая часть которого подсоединена к воздухосборнику; блок коммутации, имеющий блок гальванических развязок и грозозащиты; электронный блок управления электромагнитами электропневматического блока управления клапанами, входы которого соединены через блок коммутации с выходами управления от горочного поста состоящий из контроллера, энергонезависимой памяти, соединенных с контроллером модуля аналоговых сигналов, модуля дискретных сигналов, соединяемого с электромагнитами управления электропневматического блока управления клапанами; пульт оператора с интерфейсом, отличающаяся тем, что полость, управляющая открытием растормаживающего прямоточного клапана, подсоединена к пневмомагистрали за патрубком тормозного прямоточного клапана через клапан «или» и к воздухосборнику через второй двухпозиционный пневмораспределитель с электромагнитным управлением и через третью пневмолинию для открытия растормаживающего прямоточного клапана или с атмосферой при закрытии растормаживающего прямоточного клапана; первый, второй и третий датчики давления соединены с модулем аналоговых сигналов электронного блока управления; модуль дискретных сигналов электронного блока управления соединяется с электромагнитами управления клапанами регулятора давления электропневматического блока управления клапанами и первым и вторым электромагнитами пневмораспределителей, управляемыми в соответствии с программой, сохраняемой в блоке энергонезависимой памяти контроллера; блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, модулями аналоговых и дискретных сигналов; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту управления.
2. Система по п. 1, отличающаяся тем, что модуль дискретных сигналов электронного блока управления имеет модуль широтно-импульсной модуляции.
3. Система по п. 1, отличающаяся тем, что к пневмомагистрали за патрубком тормозного прямоточного клапана подсоединен дополнительный растормаживающий прямоточный клапан, полости которого, управляющие его открытием и закрытием, соединены с соответствующими полостями основного растормаживающего прямоточного клапана.
4. Система по п. 1, отличающаяся тем, что воздухосборник подсоединен к главной пневмолинии двумя пневмомагистралями, каждая из которых имеет пневматический регулятор давления, а управляющие полости тормозного прямоточного клапана и растормаживающего прямоточного клапана попарно соединены между собой.
5. Система по п. 4, отличающаяся тем, что к каждой пневмомагистрали за выходным патрубком тормозного прямоточного клапана подсоединен дополнительный растормаживающий прямоточный клапан, при этом полости растормаживающих пневматических клапанов, управляющие открытием и закрытием клапанов, соединены между собой.
6. Способ управления системой управления пневматическим приводом вагонного замедлителя, описанной в любом из пп. 1-5, включающий: получение электронным блоком данных от горочного поста о заданной ступени давления в пневмоцилиндрах пневматического привода вагонного замедлителя и интервала времени на достижение заданного максимального для данного интервала давления; получение электронным блоком управления сигналов от первого, второго и третьего датчиков давления; подачу управляющего сигнала от модуля дискретных сигналов электронного блока управления на первый электромагнит управления регулятора давления электропневматического блока управления клапанами для включения регулятора давления и отсчет времени от момента подачи сигнала на первый электромагнит управления регулятора давления, открытие тормозного прямоточного клапана; контроль уровня давления в управляющей полости тормозного прямоточного клапана, регистрируемого первым датчиком давления, и регистрация времени достижения в пневмоцилиндре максимального давления ступени, заданной оператором горочного поста; контроль уровня давления в главной пневмолинии на основе электрического сигнала, получаемого от второго датчика давления; получение электронным блоком управления от оператора горочного поста информации о переходе к более высокой ступени давления в пневмомагистрали; увеличение мощности управляющего сигнала, подаваемого от модуля дискретных сигналов электронного блока управления на первый электромагнит регулятора давления электропневматического блока управления клапанами и отсчет времени от момента подачи данного сигнала до достижения в пневмомагистрали максимального давления, соответствующего более высокой ступени, заданной оператором; контроль уровня давления в воздухосборнике на основе электрического сигнала, получаемого от третьего датчика; получение электронным блоком управления информации от оператора горочного поста о заданной более низкой ступени давления в пневмомагистрали; отключение первого электромагнита клапана управления регулятора давления от модуля дискретных сигналов и подача управляющего сигнала от модуля дискретных сигналов на второй электромагнит клапана управления для отключения регулятора давления и закрытия тормозного прямоточного клапана; подача управляющего сигнала от модуля дискретных сигналов на электромагнит второго пневмораспределителя; соединение управляющей полости растормаживающего прямоточного клапана с третьей пневмолинией, соединенной с воздухосборником; открытие растормаживающего прямоточного клапана до достижения в пневмолинии минимального давления в интервале заданной оператором горочного поста ступени; регистрация через заданный интервал времени контроллером электронного блока управления уровня давления, получаемого от второго датчика давления; достижение в пневмомагистрали минимального давления заданной ступени сбросом воздуха в атмосферу через открытый растормаживающий прямоточный клапан; снижение давление в пневмомагистрали до атмосферного; подачу команды от электронного блока управления на включение электромагнита первого двухпозиционного пневмораспределителя и отключение электромагнита второго двухпозиционного пневмораспределителя электропневматического блока управления клапанами; закрытие растормаживающего прямоточного клапана; поступление команды от горочного поста на электронный блок управления на последующее изменение давления в пневмомагистрали, отличающийся тем, что при получении задания о ступени давления воздуха в пневмомагистрали от оператора горочного поста контроллером электронного блока управления в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали и на основе показаний первого и второго датчиков давления вычисляются скорости изменения давления в управляющей полости тормозного прямоточного клапана и в пневмомагистрали; если за заданный интервал времени открытия тормозного прямоточного клапана не достигнута заданная скорость изменения давления в пневмомагистрали, то производится увеличение мощности управляющего сигнала, подаваемого на первый электромагнит управления регулятора давления; если при заданном оператором горочного поста переходе к повышенной ступени давления воздуха в пневмомагистрали и пневмоцилиндрах и вычисленной контроллером электронного блока управления положительной скорости изменения давления в пневмомагистрали, меньшей заданной, то по команде от электронного блока управления увеличивается мощность управляющего сигнала, подаваемого на первый электромагнит регулятора давления, величина открытия регулятора давления и тормозного прямоточного клапана; при заданном оператором горочного поста переходе к пониженной ступени давления воздуха в пневмомагистрали и при вычисленной контроллером электронного блока управления положительной или нулевой скорости изменения давления при закрытом тормозном прямоточном клапане для открытия растормаживающего прямоточного клапана контроллер электронного блока управления подает управляющий сигнал на отключение электромагнита первого пневмораспределителя и включение электромагнита второго пневмораспределителя.
7. Способ управления по п. 6, отличающийся тем, что управляющие сигналы на электромагниты первого и второго пневмоклапанов регулятора давления и электромагниты первого и второго пневмораспределителей могут быть заданы в виде набора импульсов, амплитуда, частота и скважность которых определяется программой контроллера на основании показаний датчиков давления.
8. Способ управления по п. 6 или 7, отличающийся тем, что он выполняется в соответствии с программой, загружаемой в контроллер или в энергонезависимую память электронного блока управления для исполнения действий в соответствии с заданным алгоритмом.
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| Грохот со свободным движением и резонансными успокоителями | 1949 |
|
SU87132A1 |
| Пневмопривод вагонного замедлителя | 1990 |
|
SU1729873A1 |

