Настоящее изобретение относится к способу для подвешивания птицы или ее частей на подвесной конвейер, снабженный кронштейнами для транспортировки птицы или ее частей, подвешенных на вышеупомянутых кронштейнах, причем метод использует систему, включающую
- подвесную конвейерную секцию подвесного конвейера; и
- первый конвейер для транспортировки птицы или ее частей в направлении его секции, расположенной под подвесной конвейерной секцией;
и способ
- транспортировки птицы или ее частей посредством первого конвейера в направлении секции;
- причем оператор снимает птицу или ее части с вышеупомянутой секции; и
- оператор подвешивает вышеупомянутую птицу или ее части на кронштейны, когда вышеупомянутые кронштейны транспортируются вдоль подвесной конвейерной секции.
Способы для подвешивания птицы на подвесном конвейере уже известны. Например, оглушенная СО2 птица должна подвешиваться на подвесной конвейер достаточно быстро с целью ее забоя и обработки. Для удобства подвешивания птица может транспортироваться посредством первого конвейера в его секцию, расположенную по меньшей мере под секцией подвесного конвейера. Для ясности изложения последняя далее будет упоминаться как подвесная конвейерная секция. Таким образом, оператор, находящийся рядом с секцией первого конвейера, может, в связи с изложенным, брать и подвешивать вышеупомянутую птицу на кронштейны, например, подвески, при его транспортировке вдоль подвесной конвейерной секции без необходимости самому переходить в другое место.
WO 2000041568 раскрывает способ и компоновку узлов для подвешивания забитой птицы на крюках. Ленточный конвейер транспортирует птицу к группе людей, а над ленточным конвейером проходит часть маршрута подвесного конвейера, снабженного крюками, на которые люди подвешивают птицу, подаваемую на ленточном конвейере.
US 4090275 раскрывает конвейерную систему лотков для транспортировки внутренностей от тушек, содержащую совокупность отдельных блоков лотков, причем каждый блок лотка способен принимать набор внутренностей от тушки, перемещающейся на конвейерной системе. Он также содержит платформу, которая может перемещаться вдоль пары опорных рельсов с той же скоростью, что и тушка.
Термин «конвейер» подразумевает механическое устройство, приспособленное для перемещения предметов или людей из одного места в другое посредством бесконечного подвижного элемента, такого как бесконечная подвижная лента, цепь, платформа или тому подобного, приводимое в движение приводными устройствами.
Проблема состоит в том, что можно ожидать, что бойня будет обрабатывать птицу при высоких скоростях, таких как 15000 птиц в час или даже при более высоких скоростях. Поэтому, скорость перемещения кронштейнов может оказаться такой, что оператор не будет иметь достаточного времени для подвешивания птицы на все из них, и кронштейны подвесного конвейера могут оказаться пустыми.
Цель изобретения состоит в том, чтобы облегчить эту проблему. С этой целью способ в соответствии с ограничительной частью пункта 1 формулы изобретения характеризуется тем, что система также включает второй конвейер, скомпонованный для перемещения оператора рядом с секцией первого конвейера и в том же направлении, что и кронштейны, транспортируемые вдоль подвесной конвейерной секции. Таким образом, скорость кронштейнов уменьшается относительно оператора, перемещаемого вторым конвейером.
Второй аспект изобретения относится к системе, включающей:
- подвесную конвейерную секцию подвесного конвейера; и
- первый конвейер для транспортировки птицы или ее частей в направлении его секции, расположенной под подвесной конвейерной секцией;
причем система также включает второй конвейер, расположенный под первым конвейером и скомпонованный для перемещения оператора рядом с секцией первого конвейера и в том же направлении, что и кронштейны в секции подвесного конвейера. Таким образом, оператор может быть перемещен под подвесной конвейерной секцией, а система может помочь оператору подвешивать птицу или ее части на кронштейны в соответствии со способом.
Второй конвейер может быть сконструирован таким образом, что оператор, сидящий на стуле, перемещается посредством бесконечной цепи. В другом варианте реализации изобретения предпочтительно, что второй конвейер содержит бесконечную движущуюся ленту или платформу, установленную ниже и рядом с секцией первого конвейера, на которой оператор может стоять при транспортировке. Таким образом, в способе улучшается снятие продукции с конвейера и ее подвешивание. Предпочтительно, вертикальное расстояние между первым бесконечным движущимся элементом в секции и бесконечной движущейся лентой или платформой второго конвейера находится в диапазоне между 60 см и 100 см.
В варианте реализации изобретения второй конвейер представляет собой круговой транспортер, в котором движущаяся лента или платформа для транспортировки оператора образует практически горизонтальный конвейерный контур, таким образом, что контур размещен под подвесной конвейерной секцией. Таким образом, в способе оператор может транспортироваться бесконечно. Контур может иметь эллиптическую форму или форму окружности. Предпочтительно, если подвесная конвейерная секция образует разомкнутый контур, расположенный концентрически к горизонтальному конвейерному контуру относительно вертикальной оси, то есть при виде сверху.
В варианте реализации изобретения скорости перемещения кругового транспортера и кронштейнов в подвесной конвейерной секции устанавливаются таким образом, что кронштейны движутся вперед относительно транспортируемого оператора. Таким образом, оператор может быть непрерывно обеспечен пустыми кронштейнами, в то время как заполненные кронштейны перемещаются дальше относительно оператора. Например, если круговой транспортер установлен на транспортировку оператора со скоростью V1, а кронштейны перемещаются со скоростью V2, то отношение V1/V2 будет меньше 1, предпочтительно между 0,4 и 1, более предпочтительно между 0,6 и 1 и наиболее предпочтительно между 0,8 и 1. В этом примере подвесная конвейерная секция является концентрической.
Первый конвейер может транспортировать птицу или ее части без тары или содержащимися в таре. Она может иметь линейную или изогнутую форму. Предпочтительно, чтобы первый конвейер был скомпонован таким образом, чтобы секция могла перемещаться в том же направлении, что и направление движения кронштейнов вдоль подвесной конвейерной секции. Более предпочтительно, чтобы первый конвейер также был круговым транспортером, а птица могла перемещаться бесконечно по бесконечной ленте, платформе или цепной секции или секциям, образующим также практически горизонтальный контур транспортировки, имеющий эллиптическую форму или форму окружности. Для вида сверху дополнительный круговой транспортер может быть концентрическим относительно подвесной конвейерной секции, причем последний образует разомкнутый контур и предпочтительно располагается также концентрически относительно кругового транспортера, так что дополнительный горизонтальный контур транспортировки находится выше и рядом с горизонтальным контуром транспортировки кругового транспортера. Скорости перемещения горизонтального контура транспортировки и дополнительного горизонтального контура транспортировки могут быть синхронизированы.
В варианте реализации изобретения система также включает дополнительный конвейер для подачи птицы или ее частей на дополнительный круговой транспортер. Еще более предпочтительно, чтобы система могла включать средства для регулирования скорости дополнительной бесконечной ленты дополнительного конвейера для управления подачей птицы на дополнительный круговой транспортер, например, нажимную кнопку или тому подобное, предусмотренную в первом или втором конвейере для пуска/остановки дополнительного конвейера. Таким образом, оператор может остановить подачу птицы или ее частей. Нажимная кнопка может быть установлена для нажатия рукой или ногой. Другим примером является использование фотоэлементов для детектирования момента, когда оператор приближается/удаляется относительно дополнительного конвейера для активации вышеупомянутого дополнительного конвейера.
В дальнейшем изобретение будет дополнительно разъяснено со ссылкой на чертеж с примером реализации устройства, соответствующего изобретению, не подразумевающего ограничений, кроме определяемых пунктами приложенной формулы изобретения.
На чертежах:
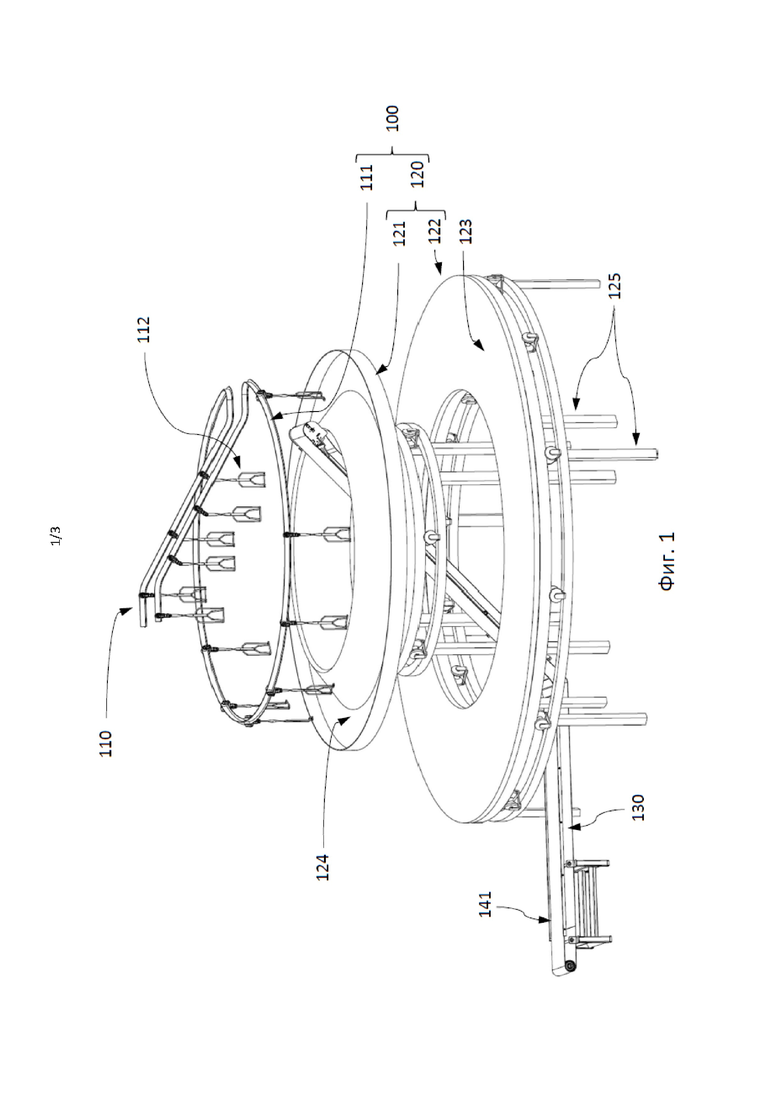
- фигура 1 показывает вид системы;
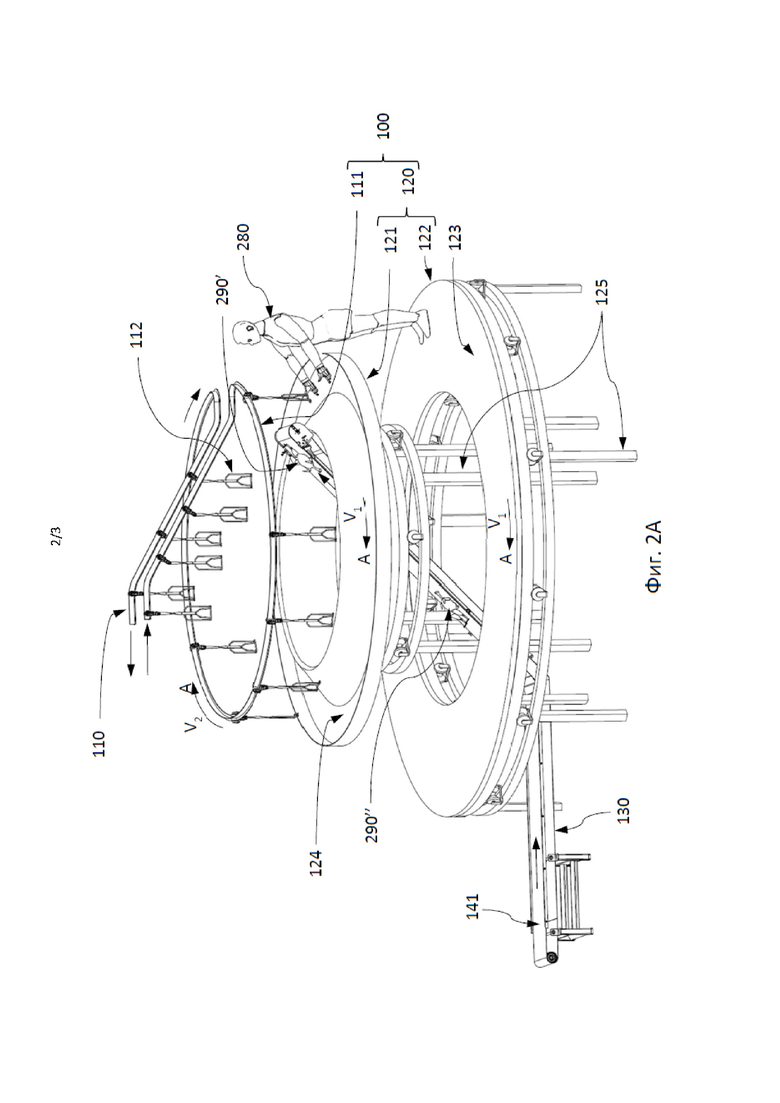
- фигура 2А показывает систему на фигуре 1 с оператором, стоящим в первом положении; а
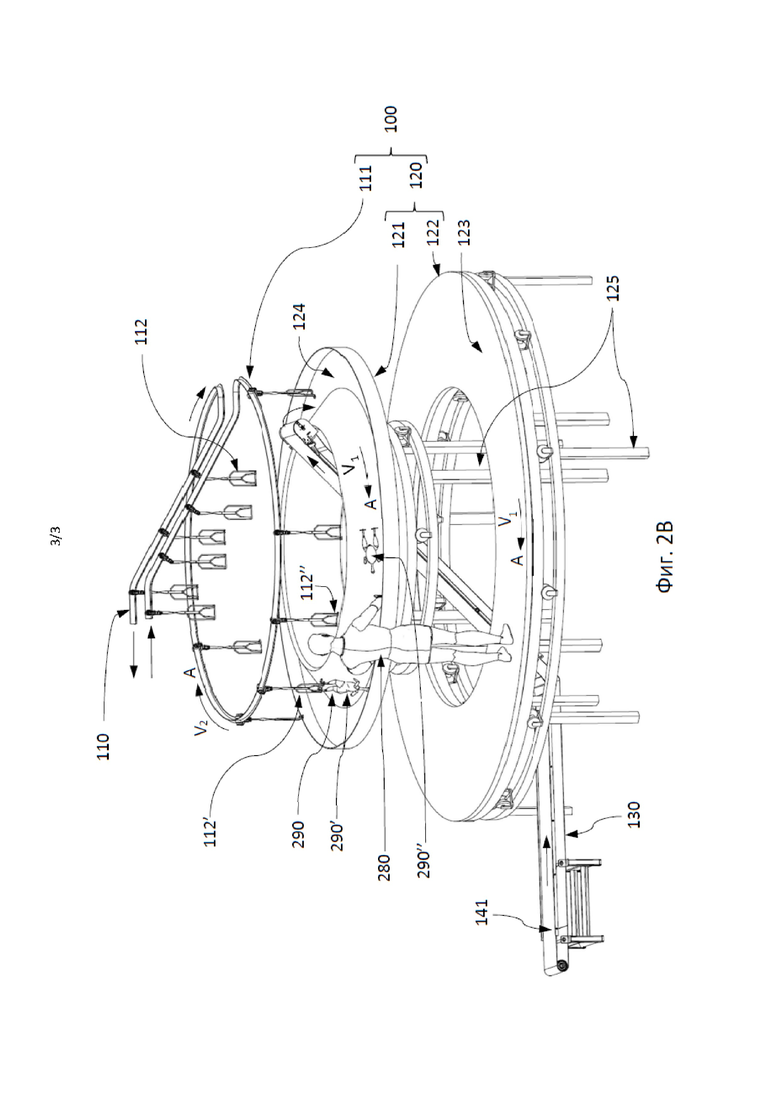
- фигура 2В показывает систему на фигуре 1 с оператором, стоящим во втором положении.
Фигура 1 демонстрирует вариант реализации системы 100 в соответствии с изобретением. Система 100 включает секцию 111 подвесного конвейера 110 и устройство 120.
Секция 111, далее упоминаемая как подвесная конвейерная секция 111, образует разомкнутый контур, имеющий практически форму окружности. Подвесной конвейер содержит кронштейны 112, в данном примере подвески, которые транспортируются цепью и устройствами первого привода (не показаны).
Устройство 120 содержит первый конвейер 121 и второй конвейер 122. В данном варианте реализации изобретения оба конвейера поддерживаются рамой 125. Однако, важно отметить, что система 100 может включать конвейеры, поддерживаемые независимыми рамами.
Второй конвейер 122 представляет собой круговой транспортер 122, включающий бесконечный движущийся элемент 123, в настоящем варианте реализации изобретения платформу 123, приводимую в движение устройствами привода (не показаны), для транспортировки вдоль практически горизонтально расположенного контура. Платформа 123 имеет форму окружности и располагается концентрически относительно подвесной конвейерной секции 111 вдоль вертикальной оси.
Первый конвейер 121 тоже представляет собой круговой транспортер 121, также включающий бесконечный движущийся элемент 124, в данном варианте реализации изобретения приемный контейнер 124, сформированный на днище платформы. Он приводится в движение дополнительными устройствами привода для транспортировки вдоль дополнительного практически горизонтального контура. Кроме того, платформа 123 и приемный контейнер 124 являются синхронизированными.
Как показано на фигуре 1, платформа 123 и приемный контейнер 124 скомпонованы концентрически вдоль вертикальной оси, причем последний расположен выше и рядом с платформой 123. Вертикальное расстояние между ними по вертикали составляет 90 см.
Наконец, система 100 также имеет дополнительный конвейер 130, включающий бесконечную ленту 141 для подачи птицы в приемный контейнер 124.
Фигуры 2А и 2В показывают систему 100 в процессе ее применения. Для ясности изложения только один оператор 280 представлен стоящим на верху платформы 123 кругового транспортера 122. Однако, вдоль вышеупомянутой ленты могут быть размещены двое или большее число операторов.
На фигуре 2А оператор 280 стоит в первом положении на платформе 123 кругового транспортера 122. Платформа 123 передвигается в направлении А со скоростью перемещения V1 для транспортировки оператора 280. Таким образом, спустя короткий промежуток времени оператор 280 должен будет стоять во втором положении, как показано на фигуре 2В.
Птица 290 подается дополнительным конвейером 130 на приемный контейнер 124 дополнительного кругового транспортера 121, причем последний перемещается в направлении А. Для ясности показаны только первая курица 290' и вторая курица 290''.
Оператор 280 берет первую курицу 290' из приемного контейнера 124 (фигура 2А) и подвешивает ее на кронштейн 120', транспортируемый в подвесной конвейерной секции 111 (фигура 2В).
Кронштейны 112 транспортируются в подвесной конвейерной секции 111 в том же направлении А, но со скоростью перемещения V2. В данном варианте реализации изобретения отношение V1/V2 равно 0,8, означая, что скорость перемещения контейнеров 112 выше, чем скорость перемещения оператора. Таким образом, кронштейны 112 продвигаются вперед относительно оператора 280, транспортируемого на платформе 123. Затем оператор 280 может взять курицу 290'', перемещаемую на приемном контейнере 124, и подвесить ее на доступный пустой кронштейн 112'' (фиг. 2В) без смены места на платформе 123, на которой он стоит.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия технологической обработки и способ для сбора сердец из комплектов внутренностей, извлеченных из тушек птиц и отделенных от них | 2021 |
|
RU2786168C1 |
| Устройство для убоя, оборудование для убоя и способ убоя | 2021 |
|
RU2786228C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ УПАКОВАННЫХ ПИЩЕВЫХ ПРОДУКТОВ | 2019 |
|
RU2772627C2 |
| РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 2012 |
|
RU2543292C2 |
| СПОСОБ ПОДАЧИ ЖИВОЙ ПТИЦЫ НА ПОДВЕСНЫЕ ПУТИ | 2003 |
|
RU2274001C2 |
| КОНВЕЙЕР ЛЕНТОЧНЫЙ С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2336209C1 |
| ПЕРЕДВИЖНОЕ УСТРОЙСТВО ОБРАБОТКИ НАСЫПНОГО МАТЕРИАЛА C ПОВОРАЧИВАЮЩИМСЯ ТРАНСПОРТЕРОМ | 2014 |
|
RU2657145C2 |
| ГЛАВНАЯ РАМА ДЛЯ ПЕРЕДВИЖНОГО УСТРОЙСТВА ОБРАБОТКИ НАСЫПНОГО МАТЕРИАЛА | 2014 |
|
RU2657144C2 |
| ЛИНИЯ ДЛЯ ОБРАБОТКИ И/ИЛИ ИНСПЕКЦИИ ДОМАШНЕЙ ПТИЦЫ, ПОДВЕШЕННОЙ ЗА НОГИ | 2016 |
|
RU2625970C1 |
| СЕКЦИОННЫЙ ТРАНСПОРТЕР ДЛЯ ПЕРЕМЕЩЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ ЧЕРЕЗ ПРОСТРАНСТВА С ПРЕПЯТСТВИЯМИ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ТРАНСПОРТИРОВКИ СЫПУЧИХ МАТЕРИАЛОВ | 2015 |
|
RU2602156C2 |
Группа изобретений относится к птицеперерабатывающей отрасли, а именно к способу и системе для подвешивания птицы или ее частей на подвесной конвейер. Способ характеризуется тем, что подвесной конвейер снабжен кронштейнами для транспортировки птицы или её частей, подвешенных на кронштейнах, при этом предусматривает использование системы, включающей: подвесную конвейерную секцию подвесного конвейера и первый конвейер для транспортировки птицы или её частей в направлении его секции, расположенной под подвесной конвейерной секцией. Птица или её части транспортируются по первому конвейеру в направлении секции, оператор берет птицу или её части из секции и подвешивает вышеупомянутую птицу или её части на кронштейны, транспортируемые вдоль подвесной секции конвейера. Подвесная секция конвейера образует разомкнутый контур. Система включает второй конвейер, расположенный под первым конвейером и скомпонованный для транспортировки оператора, второй конвейер представляет собой круговой транспортер, и способ содержит шаг транспортировки оператора бесконечно вдоль горизонтального конвейерного контура под разомкнутым контуром посредством второго конвейера рядом с секцией первого конвейера и в том же направлении, что и кронштейны в подвесной секции конвейера, в то время как вышеупомянутый оператор берет и подвешивает вышеупомянутую птицу или её части. 2 н. и 10 з.п. ф-лы, 2 ил.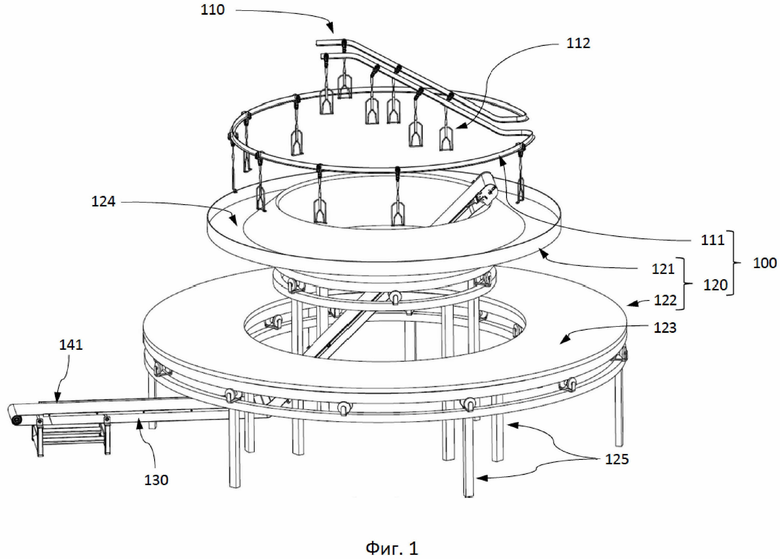
1. Способ для подвешивания птицы или её частей на подвесной конвейер, снабженный кронштейнами для транспортировки птицы или её частей, подвешенных на указанных кронштейнах, причем способ использует систему, включающую:
- подвесную конвейерную секцию подвесного конвейера; и
- первый конвейер для транспортировки птицы или её частей в направлении его секции, расположенной под подвесной конвейерной секцией;
причем в способе:
- птица или её части транспортируются по первому конвейеру в направлении секции;
- оператор берет птицу или её части из секции; и
- оператор подвешивает вышеупомянутую птицу или её части на кронштейны, транспортируемые вдоль подвесной секции конвейера;
отличающийся тем, что подвесная секция конвейера образует разомкнутый контур, система включает второй конвейер, расположенный под первым конвейером и скомпонованный для транспортировки оператора, второй конвейер представляет собой круговой транспортер, и способ содержит шаг транспортировки оператора бесконечно вдоль горизонтального конвейерного контура под разомкнутым контуром посредством второго конвейера рядом с секцией первого конвейера и в том же направлении, что и кронштейны в подвесной секции конвейера, в то время как вышеупомянутый оператор берет и подвешивает вышеупомянутую птицу или её части.
2. Способ по п. 1, отличающийся тем, что оператор транспортируется в положении стоя.
3. Способ по п. 1, отличающийся тем, что скорость перемещения кругового транспортера и кронштейнов в подвесной секции конвейера выбрана таким образом, что кронштейны перемещаются вперед относительно транспортируемого оператора.
4. Способ по п. 1, отличающийся тем, что первый конвейер представляет собой дополнительный круговой транспортер, а в способе птица или её части бесконечно транспортируются по дополнительному круговому транспортеру вдоль дополнительного горизонтального конвейерного контура, расположенного над горизонтальным конвейерным контуром кругового транспортера.
5. Система для помощи по меньшей мере одному оператору для подвешивания птицы или её частей на подвесной конвейер, снабженный движущимися кронштейнами для транспортировки птицы или её частей, подвешенных на вышеупомянутых кронштейнах, причем система включает
- подвесную конвейерную секцию подвесного конвейера; и
- первый конвейер для транспортировки птицы или её частей в направлении его секции, расположенной под подвесной конвейерной секцией;
отличающаяся тем, что подвесная конвейерная секция образует разомкнутый горизонтальный конвейерный контур, система также включает второй конвейер, расположенный под первым конвейером, представляющий собой круговой транспортер, причем второй конвейер включает ленту или платформу, образующую горизонтальный конвейерный контур под разомкнутым горизонтальным контуром, и второй конвейер скомпонован для транспортировки по меньшей мере одного оператора рядом с секцией первого конвейера и в том же направлении, что и кронштейны в вышеупомянутой подвесной секции конвейера.
6. Система по п. 5, отличающаяся тем, что второй конвейер содержит ленту или платформу, скомпонованную для транспортировки по меньшей мере одного оператора, стоящего на ней.
7. Система по п. 5, отличающаяся тем, что скорости перемещения кругового транспортера и кронштейнов в подвесной секции конвейера выбраны таким образом, что кронштейны перемещаются вперед относительно транспортируемого оператора.
8. Система по п. 7, отличающаяся тем, что круговой транспортер скомпонован для транспортировки оператора со скоростью V1, а кронштейны перемещаются со скоростью V2, причем отношение V1/V2 ниже 1, предпочтительно между 0,4 и 1, более предпочтительно между 0,6 и 1, и наиболее предпочтительно между 0,8 и 1.
9. Система по пп. 5-8, отличающаяся тем, что первый конвейер представляет собой круговой транспортер и содержит также бесконечную движущуюся ленту или платформу, определяющую дополнительный горизонтальный конвейерный контур, а дополнительный горизонтальный конвейерный контур является концентрическим вдоль вертикальной оси.
10. Система по п. 9, отличающаяся тем, что вертикальное расстояние между конвейерным контуром и дополнительным конвейерным контуром находится в пределах между 60 и 100 см.
11. Система по п. 10, включающая дополнительный конвейер для подачи птицы или её частей на дополнительный круговой транспортер.
12. Система по п. 10, включающая средства для регулирования скорости дополнительного конвейера, чтобы управлять количеством птицы или её частей для подачи на дополнительный круговой транспортер.
| WO 2000041568 A2, 20.07.2000 | |||
| Система для размещения подаваемых передних частей тушек птицы в виде упорядоченной последовательности в линии переработки | 2019 |
|
RU2715855C1 |
| US 4090275 A1, 23.05.1978 | |||
| US 3624865 A1, 07.12.1971 | |||
| AT 363432 T, 15.06.2007 | |||
| Система для размещения подаваемых передних частей тушек птицы в виде упорядоченной последовательности в линии переработки | 2019 |
|
RU2715855C1 |

