Изобретение относится к области авиационной техники, а именно к комплексам управления информационно-исполнительными системами бортового оборудования, общесамолетным оборудованием и летательным аппаратом.
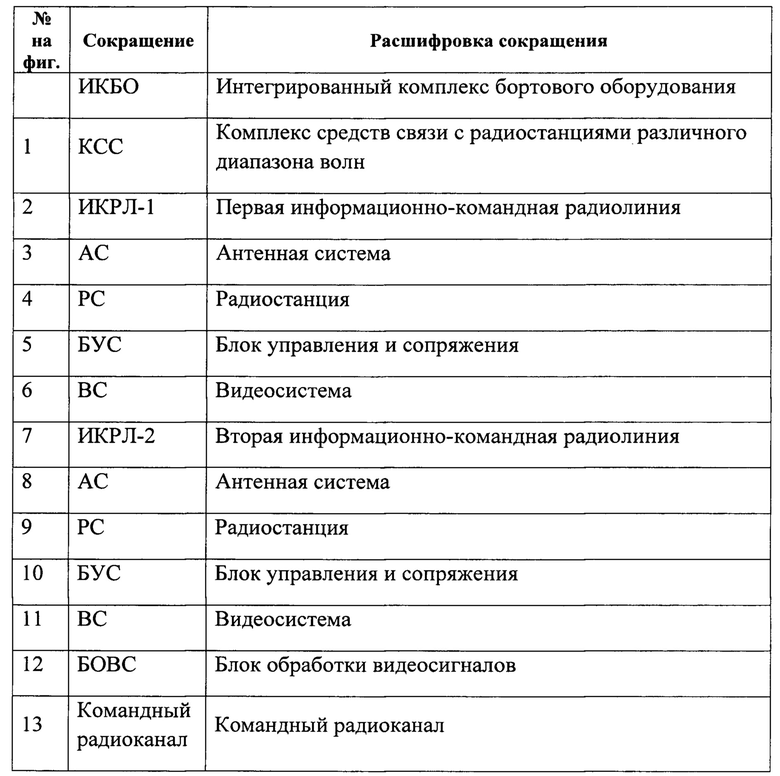
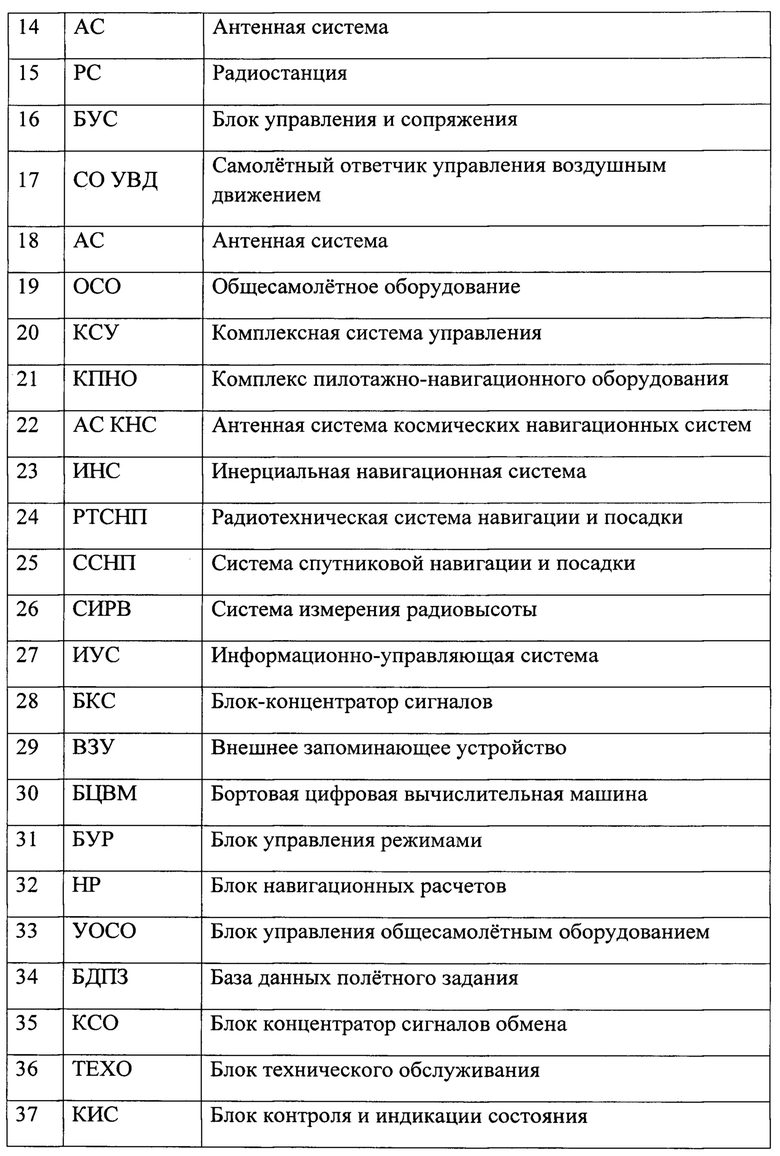
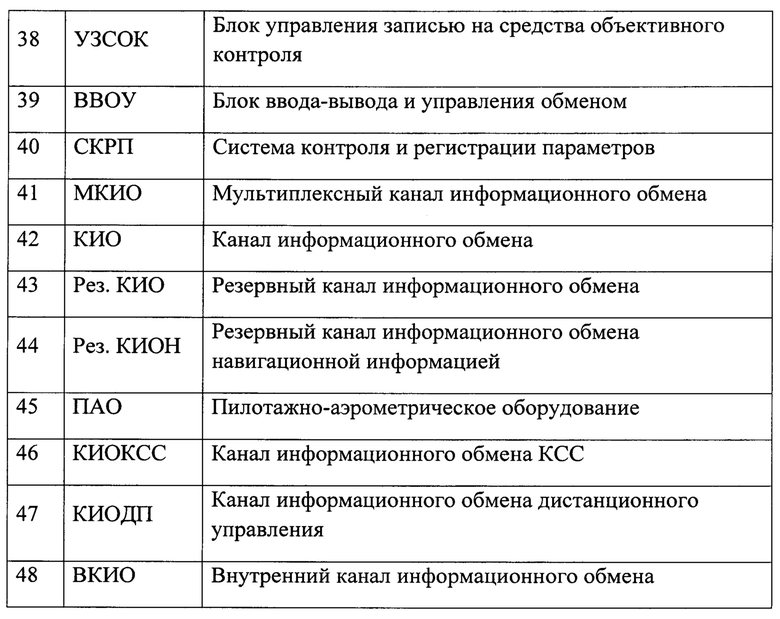
Перечень обозначений и сокращений, которые в дальнейшем будут использованы при характеристике разработанного технического решения.
Кроме того, будут использованы следующие термины:
Сигнал - исполнительный информационный параметр, имеющий «плавный характер».
Команда - дискретное бинарное сообщение на исполнение определенного действия (назначение или изменение режима, включение/выключение устройства).
Признак - сообщение обратной связи, характеризующее факт исполнения команды или нахождения сигнала в определенной области.
Известно техническое решение (RU, 2174485, опубл. 10.10.2001), относящееся к системам управления учебно-тренировочным и учебно-боевыми самолетами, в котором бортовое оборудование объединено в единый интегрированный комплекс посредством мультиплексной системы информационного обмена, состоящей из трех каналов информационного обмена.
В качестве недостатков данного технического решения можно указать следующие:
- низкая надежность, так как при отказе бортовой цифровой вычислительной системы происходит отказ всего комплекса бортового оборудования из-за отсутствия резервного канала информационного обмена, что приводит к невозможности выполнения задач бортового радиоэлектронного оборудования;
- невозможность автоматического управления полетом при отказе бортовой вычислительной системы из-за отсутствия резервного вычислителя, в котором реализовано решение навигационных задач, и из-за отсутствия резервного канала информационного обмена навигационной информацией.
Известен (RU, 2488775, опубл. 27.07.2013) интегрированный комплекс бортового оборудования многофункционального самолета, содержащий взаимосвязанные по каналу информационного обмена следующие системы, перечисленные обобщенно: интегрированный комплекс средств связи, оперативные органы управления, устройство выброса расходуемых средств радиоэлектронного поражения, система управления средствами, общесамолетное оборудование, комплекс пилотажно-навигационного оборудования, система контроля и регистрации параметров полета, комплект средств поражения, комплексная система управления, интегрированная радиотехническая система, интегрированная оптико-электронная система, информационно управляющая система с бортовой вычислительной системой.
В данном техническом решении комплекс бортового оборудования и информационно-управляющая система включительно функционируют только при постоянном взаимодействии с экипажем, что приводит к следующим недостаткам: наличие систем информационно-управляющего поля, систем жизнеобеспечения экипажа и др. повышает массу комплекса электронного оборудования, что приводит к ухудшению характеристик летательного аппарата (уменьшение полезной нагрузки, продолжительности полета, маневренности); отсутствие автономности функционирования (необходимость задействования экипажа в управлении) приводит к повышению нагрузки на экипаж, что снижает надежность и быстродействие комплекса бортового оборудования; реализация резервного управления при отказе центральной вычислительной системы с участием экипажа приводит к необходимости ручного пилотирования для возврата и посадки; необходимость обеспечения комфортной работы экипажа.
Техническая проблема, решаемая посредством разработанного комплекса, состоит в создании интегрированного комплекса бортового оборудования беспилотного летательного аппарата.
Технический результат, достигаемый при реализации разработанного комплекса, состоит в расширении функциональных возможностей, повышении автономности и автоматизации комплекса бортового оборудования, повышение надежности комплекса бортового оборудования и, соответственно, повышение эффективности применения беспилотного летательного аппарата за счет исключения информационно-управляющего поля из состава КБО и за счет отсутствия необходимости принятия решений экипажем и постоянном участии в управлении летательным аппаратом.
Для достижения указанного технического результата предложено использовать разработанный интегрированный комплекс бортового оборудования беспилотного летательного аппарата. Он содержит взаимосоединенные по мультиплексному каналу информационного обмена (МКИО) и по каналу информационного обмена (КИО) следующие системы:
- комплекс пилотажно-навигационного оборудования (КПНО), который состоит из интегрированных в комплекс систем:
а) антенной системы космических навигационных систем (АС КНС);
б) инерциальной навигационной системы (ИНС);
в) радиотехнической системы навигации и посадки (РТСНП);
г) спутниковой системы навигации и посадки (ССНТ);
д) системы измерения радиовысоты (СИРВ);
- комплекс средств связи (КСС), который состоит из интегрированных в комплекс радиоканалов различного диапазона длин волн (использование отдельного диапазона длин волн для каждого радиоканала обеспечивает повышение надежности сопряжения интегрированного комплекса бортового оборудования с наземным пунктом контроля по радиоканалам КСС):
а) первой информационно-командной радиолинии (ИКРЛ-1), которая состоит из блока управления и сопряжения (БУС), радиостанции (PC), антенной системы (АС) и видеосистемы (ВС);
б) второй информационно-командной радиолинии (ИКРЛ-2), которая состоит из БУС, радиостанции (PC), АС, ВС и блока обработки видеосигналов (БОВС);
в) командного радиоканала, который состоит из БУС, радиостанции (PC) и АС;
- информационно-управляющую систему (ИУС), которая состоит из следующих систем:
а) бортовой цифровой вычислительной машины (БЦВМ);
б) блока-коммутатора сигналов (БКС);
в) внешнего запоминающего устройства (ВЗУ);
- самолетный ответчик управления воздушным движением (СО УВД);
- антенную систему (АС);
- общесамолетное оборудование (ОСО);
- комплексную систему управления (КСУ);
- систему контроля и регистрации параметров (СКРП);
- пилотажное аэрометрическое оборудование (ПАО);
и обеспечивающий:
- формирование сигналов автоматического управления в ИУС и их передачу в КСУ по четырем независимым каналам, которое обеспечивается:
а) интеграцией ИУС (двух БЦВМ) и КСУ с использованием мультиплексного канала информационного обмена (двух линий МКИО)
б) интеграцией ИУС (двух БЦВМ) и КСУ с использованием канала информационного обмена (двух линий двуполярного последовательного кода по ГОСТ 18977-79);
- резервное автоматическое управление при отказе БЦВМ, которое обеспечивается:
а) резервным каналом информационного обмена навигационной информацией;
б) автоматическим управлением КСУ при отказе БЦВМ с использованием навигационной информации;
- автоматическое принятие решений по изменению цели полета, которое обеспечивается:
а) автономным автоматическим принятием решений в ИУС по информации от всех систем интегрированного комплекса бортового оборудования, которая поступает по МКИО и КИО;
- дистанционное ручное управление полетом и системами, которое обеспечивается:
а) тремя радиоканалами различного диапазона волн;
б) интеграции КСС и ИУС с использованием МКИО и КИО;
в) каналом информационного обмена дистанционного пилотирования;
г) МКИО, КИО для индикационного обеспечения наземного пункта контроля и управления;
д) резервного канала информационного обмена для индикационного обеспечения наземного пункта контроля и управления при отказе БЦВМ;
- автоматическая посадка по информации об отклонениях от посадочной траектории с использованием трех различных физических принципов:
а) радиотехническая глиссада (отклонения формируются в РТСНП);
б) спутниковая глиссада (отклонения формируются в ССНП по сигналам спутниковых систем ГЛОНАСС/GPS с использованием дифференциальных поправок от наземной локально-корректирующей станции);
в) расчетная траектория посадки (отклонения формируются в БЦВМ по информации о текущих навигационных параметрах беспилотного летательного аппарата).
- комплекс средств связи интегрирован в КБО, что обеспечивается:
а) использованием трех каналов различного диапазона волн, интеграция которых осуществляется за счет канала информационного обмена КСС (КИОКСС) и за счет блоков управления и сопряжения;
б) использованием в БЦВМ блока комплекса средств обмена (КСО) для обеспечения сбора и передачи в КСС всей необходимой информации для контроля и управления КБО и блока ввода-вывода и управления обменом;
в) использованием канала информационного обмена дистанционного пилотирования (КИОДП) для возможности сопряжения КСС и комплексной системы управления, что обеспечивает возможность вмешательства экипажа наземного пункта контроля и управления в управление полетом;
г) использованием резервного канала информационного обмена для сопряжения ОСО, БКС и других систем, что позволяет обеспечивать индикацию экипажу состояния систем и параметров полета;
- комплекс пилотажного оборудования интегрирован в КБО, что обеспечивается:
а) использованием в БЦВМ блока навигационных расчетов для решения навигационных задач;
б) использованием МКИО для интеграции систем КИНО с помощью блока ввода-вывода и управления обменом;
в) использованием трех отклонений от траектории посадки основанных на различных физических принципах;
г) использованием резервного канала информационного обмена навигационной информации для интеграции КПНО и КСУ при отказе БЦВМ;
д) использованием резервного канала информационного обмена для интеграции КПНО и КСС при отказе БЦВМ с целью резервного управления навигационными системами;
е) использованием спутниковых сигналов ГЛОНАСС/GPS;
- информационно-управляющая система является центральным информационно-управляющим элементом, что обеспечивается:
а) интеграцией КБО с использованием МКИО и КИО из состава ИУС;
б) интеграцией КБО с использованием БКС и резервной КИО при отказе БЦВМ;
в) интеграцией блоков БЦВМ с использованием внутреннего канала информационного обмена (ВКИО);
г) наличием в БЦВМ блока управления режимами (БУР) для согласованного управления всеми системами КБО и для принятия решений по смене цели управления в том числе и при отказах систем ИКБО, а также для автономного автоматического управления при отсутствии взаимодействия с экипажем;
д) наличием в БЦВМ блока навигационных расчетов (HP) для автоматического управления полетом и для интеграции КПНО;
е) наличием в БЦВМ блока концентратора сигналов обмена (КСО) для сбора и обработки информации, которую необходимо передать в наземный пункт контроля и управления;
ж) наличием в БЦВМ блока управления общесамолетным оборудованием (УОСО);
з) наличием в БЦВМ базы данных полетного задания (БДПЗ) для обеспечения полетным заданием систем ИКБО;
и) наличием в БЦВМ блока ввода ввода-вывода и управления обменом (ВВОУ) для интеграции систем ИКБО по МКИО и КИО;
- комплексной системы управления, которая обеспечивает:
а) автоматическое управление при отказе БЦВМ, которое обеспечивается интеграцией с КПНО по резервному КИОН;
б) дистанционное пилотирование, которое обеспечивается интеграцией с КСС по КИОДП;
в) решением навигационных задач в КСУ для увеличения автоматизации и автономности ИКБО.
Интеграция систем комплекса бортового оборудования беспилотного летательного аппарата достигнута за счет формирования интегрированного комплекса средств связи с радиостанциями различного диапазона волн, комплекса пилотажно-навигационного оборудования, самолетного ответчика управления воздушным движением, комплексной системы управления, общесамолетного оборудования, системы контроля и регистрации параметров, пилотажного аэрометрического оборудования, а также функциональной интеграции указанных систем в вычислительно-логических блоках бортовой цифровой вычислительной машины, которая интегрирована в единую информационно-управляющую систему.
Также ввиду беспилотной специфики летательного аппарата в ИКБО отсутствуют системы информационно-управляющего поля экипажа и системы жизнеобеспечения экипажа.
Изобретение иллюстрировано графическим материалом, где на фиг.1 приведена блок-схема интегрированного комплекса бортового оборудования беспилотного летательного аппарата. При этом на фигуре использованы следующие обозначения: комплекс 1 средств связи (КСС) с радиостанциями различного диапазона волн в составе:
а) первой информационно-командной радиолинии 2 (ИКРЛ-1), которая состоит из: АС 3 для обеспечения радиосвязи с наземным пунктом контроля и управления, PC 4, которая обеспечивает обмен между ИКБО и наземным пунктом контроля и управления командной информацией, информацией состояния ИКБО, информацией о параметрах полета и видеоинформацией, БУС 5, который обеспечивает сопряжение PC 4 с другими каналами КСС по КИОКСС 46, а также сопряжение с ИУС 27, ОСО 19, КСУ 20, КПНО 21 и СКРП 40 по КИО 42, резервному КИО 43 и КИОДП 47, обработку и передачу в PC 4 видеоизображения от видеосистемы 6, которая обеспечивает формирование видеоизображение и его передачу в БУС 5;
б) второй информационно-командной радиолинии 7 (ИКРЛ-2), которая состоит из: АС 8 для обеспечения радиосвязи с наземным пунктом контроля и управления, PC 9, которая обеспечивает обмен между ИКБО и наземным пунктом контроля и управления командной информацией, информацией состояния ИКБО, информацией о параметрах полета и видеоинформацией, блока 10 управления и сопряжения, который обеспечивает сопряжение PC 4 с другими каналами КСС по КИОКСС 46, а также сопряжение с ИУС 27, ОСО 19, КСУ 20, КПНО 21 и СКРП 40 по КИО 42, резервному КИО 43 и КИОДП 47, видеосистемы 11, которая обеспечивает формирование видеоизображение и его передачу в блок обработки видеосигналов (БОВС) 12, который обеспечивает обработку и передачу в PC 9 видеоизображения от ВС 11;
в) командного радиоканала 13, который состоит из: АС 14 для обеспечения радиосвязи с наземным пунктом контроля и управления, PC 15, которая обеспечивает обмен между ИКБО и наземным пунктом контроля и управления командной информацией, информацией состояния ИКБО, информацией о параметрах полета, БУС 16, который обеспечивает сопряжение PC 4 с другими каналами КСС 1 по КИОКСС 46, а также сопряжение с ИУС 27, ОСО 19, КСУ 20, КПНО 21 и СКРП 40 по МКИО 41, КИО 42, резервному КИО 43 и КИОДП 47;
самолетный ответчик управления воздушным движением (СО УВД) 17, который обеспечивает службы организации воздушного движения информацией о характеристиках и положении летательного аппарата с помощью АС 18, которая обеспечивает взаимодействие ИКБО с наземными навигационными радиомаяками, наземной локальной контрольно-корректирующей станцией, наземными службами организации воздушного движения; общесамолетное оборудование (ОСО) 19, которое включает системы: электроснабжения, топливную, противопожарную, гидросистему, пневмосистему, сопрягаемые с БКС 28 по МКИО 41 и КИО 42 и сопрягаемые с КСС по резервному КИО 43; комплексная система управления (КСУ) 20, включая систему управления самолетом, систему дистанционного управления, ограничитель предельных режимов полета, блок навигационных расчетов, исполнительные устройства системы управления; комплекс пилотажно-навигационного оборудования (КПНО) 21 в составе:
а) антенная система космических навигационных систем (АС КНС) 22, которая обеспечивает системы КПНО спутниковыми сигналами ГЛОНАСС/GPS;
б) инерциальная навигационная система (ИНС) 23, которая формирует информацию об угловом и пространственном положении летательного аппарата, а также информацию о параметрах скорости и сопрягается по МКИО 41 с БЦВМ 30, и с КСУ 20, с которой также сопрягается по резервному КИОН 44;
в) радиотехническая система навигации и посадки (РТСНП) 24, которая формирует навигационную информацию радиомаяков в том числе и при выполнении посадки и сопрягается с БЦВМ 30 по КИО 42 и с КСУ 20, с которой также сопрягается по резервному КИОН 44;
г) система спутниковой навигации и посадки (ССНП) 25, которая формирует информацию о местоположении, отклонении от траектории посадки по спутниковым сигналам, обеспечивает устранение ошибок измерения псевдодальностей с использованием корректирующих сигналов (дифференциальных поправок), которые формируются в ЛККС и сопрягается с БЦВМ 30 по КИО 42 и с КСУ 20, с которой также сопрягается по резервному КИОН 44;
д) система измерения радиовысоты (СИРВ) 26, которая формирует текущую радиовысоту и сопрягается с БЦВМ 30 по МКИО 41 и с КСУ по МКИО 41 и по резервному КИОН 44;
информационно-управляющая система (ИУС) 27 в составе:
а) блока-концентратора сигналов 28, представляющего собой устройство для приема аналоговых и дискретных сигналов по ГОСТ 18977-79 от систем летательного аппарата, приема сигналов в цифровой форме и выдачу их в аналоговом виде на исполнительные элементы и соединенного входами/выходами по МКИО 41 с БЦВМ 30, а также по резервному КИО 43 с КСС 1 и КПНО 21;
б) внешнего запоминающего устройства (ВЗУ) 29, представляющего собой устройство, которое обеспечивает ввод информации через съемный носитель из наземного комплекса подготовки, хранение ее и выдачу в БЦВМ 30 по КИО 42;
в) бортовой цифровой вычислительной машины 30, содержащей: блок управления режимами (БУР) 31, обеспечивающий автономное автоматическое принятие решений и согласованное автоматическое управление системами ИКБО, блок навигационных расчетов (HP) 32, обеспечивающий решение навигационных задач, блок управления общесамолетным оборудованием (УОСО) 33, базу данных полетного задания (БДПЗ) 34, обеспечивающую прием информации от ВЗУ, хранение и выдачу потребителям, блок концентратор сигналов обмена (КСО) 35, обеспечивающий сбор, обработку и выдачу в КСС пакетов информации для индикационного обеспечения, а также обеспечивающий многоканальное сопряжение КСС и БЦВМ, блок технического обслуживания (ТЕХО) 36, обеспечивающий наземный контроль бортового оборудования, блок контроля и индикации состояния (КИС) 37, обеспечивающий полетный контроль бортового оборудования, блок управления записью на средства объективного контроля (УЗСОК) 38, блок ввода-вывода и управления обменом (ВВОУ) 39, обеспечивающий информационный обмен по МКИО 41 и КИО 42, внутренний канал информационного обмена (ВКИО) 48, обеспечивающий информационное взаимодействие между блоками БЦВМ; система контроля и регистрации параметров (СКРП) 40, обеспечивающая регистрацию параметров от бортовых систем; пилотажное аэрометрическое оборудование (ПАО) 45, обеспечивающее формирование пилотажных параметров и сопряжение с ИУС 27 и КСУ 20 по КИО 42.
Мультиплексный канал информационного обмена (МКИО) 41 обеспечивает сопряжение систем ИКБО с БЦВМ, а канал информационного обмена (КИО) 42, обеспечивает сопряжение систем ИКБО с БЦВМ. Использование МКИО 41 и КИО 42 необходимо для повышения надежности сопряжения систем ИКБО за счет использование двух различных типов интерфейсов (МКИО - сетевой интерфейс с использованием общей шины, а КИО - интерфейс «точка-точка»), а также для резервирования сопряжения систем ИКБО при отказе МКИО 41 (сопряжение дублируется по КИО 42).
Резервный канал информационного обмена (рез. КИО) 43, обеспечивает сопряжение систем с КСС 1 при отказе БЦВМ 30, резервный канал информационного обмена навигационной информацией (рез. КИОН) 44, обеспечивает сопряжение КПНО 21 с КСУ 20 при отказе БЦВМ 30, канал информационного обмена дистанционного управления (КИОДП) 47 обеспечивает сопряжение КСС 1 с КСУ 20 для дистанционного управления летательным аппаратом с использованием наземного пункта контроля и управления.
Интегрированный комплекс бортового оборудования функционирует следующим образом:
Комплекс средств связи 1 обеспечивает сопряжение интегрированного комплекса бортового оборудования с наземным пунктом контроля и управления по радиоканалам первой информационно-командной радиолинии 2, второй информационно-командной радиолинии 7 и командного радиоканала 13. Данное сопряжение необходимо для выполнения экипажем наземного пункта функций контроля и управления беспилотным летательным аппаратом и обеспечивает передачу от ИКБО в наземный пункт контроля и управления следующих параметров:
- параметров работы и параметров контроля состояния интегрированного комплекса бортового оборудования, общесамолетного оборудования 19 и комплексной системы управления 20;
- навигационных и пилотажных параметров беспилотного летательного аппарата;
- признаков исполнения команд управления, полученных от наземного пункта контроля и управления;
- видеоинформации от видеосистем 6 и 11.
Также данное сопряжение обеспечивает передачу от наземного пункта контроля и управления в КБО и КСУ 19 сигналов и команд управления полетом беспилотного летательного аппарата и системами КБО, которые формируются экипажем. При этом:
КСС 1 обеспечивает сопряжение по радиоканалам следующим образом:
Блоки управления и сопряжения 5, 10, 16 в каждом из каналов обеспечивают сопряжение систем КБО, ОСО 19 и КСУ 20 с КСС 1 по МКИО 41, КИО 42, Рез. КИО 43 и КИОДП 47 для трансляции параметров от систем в радиостанции 4, 9, 15, где данные параметры преобразовываются в высокочастотный сигнал, который излучается через антенные системы 3, 8, 14 для передачи в наземный пункт контроля и управления.
- Прием радиосигналов от наземного пункта контроля и управления осуществляется в обратном порядке: АС 3, 8, 14 осуществляют получение радиосигналов и их передачу в высокочастотном виде в радиостанции 4, 9, 15, где они преобразовываются и транслируются через БУС 5, 10, 16 в системы ИКБО, ОСО 19 и КСУ 20 по МКИО 41, КИО 42, Рез. КИО 43 и КИОДП 47.
Также каналы ИКРЛ-1 2 и ИКРЛ-2 7 обеспечивают формирование и передачу видеоинформации в наземный пункт контроля и управления. В канале ИКРЛ-1 видеосистема 6 формирует видеоинформацию и передает ее в БУС 5 для дальнейшей обработки и передачи в PC 4. В канале ИКРЛ-2 ВС 11 формирует видеоинформацию и передает ее в блок обработки видеосигналов 12 для обработки и передачи в PC 9.
Повышение надежности функционирования КСС 1 обеспечивается за счет использования трех радиоканалов: ИКРЛ-1 2, ИКРЛ-2 7, командный радиоканал 13. Данные радиоканалы функционируют независимо, для внутреннего обмена параметрами между радиоканалами и контроля состояния используется внутренний КИОКСС 46. Также надежность функционирования КСС 1 повышается за счет использования радиоканалов 2, 7, 13 различного диапазона волн. В приведенном примере осуществления изобретения это представлено как: в ИКРЛ-1 используется PC 4 сантиметрового диапазона волн, в ИКРЛ- 2 интегрирована PC 9 дециметрового диапазона волн и в КР 13 используется PC 15 метрового диапазона волн. Передача сигналов дистанционного пилотирования от КСС 1 напрямую в КСУ 20 осуществляется по КИОДП 47.
Комплекс пилотажно-навигационного оборудования 21 обеспечивает формирование пилотажно-навигационных параметров и передачу их в КСУ 20 и БЦВМ 30 для управления движением и для навигационных расчетов по МКИО 41, КИО 42 и Рез. КИОН 44.
Антенная система космических навигационных систем 22 обеспечивает прием и трансляцию в навигационные системы навигационных сигналов от спутников.
Инерциальная навигационная система 23 обеспечивает определение навигационных и пилотажных параметров (информация об угловом и пространственном положении летательного аппарата).
Радиотехническая система навигации и посадки 24 обеспечивает определение направления на радиомаяки, а также определение отклонений от посадочной траектории по информации от радиотехнических наземных систем. Информация от радиотехнических наземных систем принимается АС 18 и транслируется в РТСНП 24.
Система спутниковой навигации и посадки 25 обеспечивает формирование отклонений от посадочной траектории по информации от спутниковых навигационных систем и с учетом поправок от наземных корректирующих станций. Поправки от наземных корректирующих станций транслируются в ССНП 25 через АС 18.
Система измерения радиовысоты 26 обеспечивает определение высоты полета относительно земной поверхности.
Системы КПНО 21 сопрягаются с БЦВМ 30 по МКИО 41 и КИО 42. Для обеспечения КСУ 20 навигационной и пилотажной информацией при отказе БЦВМ 30 введено сопряжение систем КПНО 21 с КСУ 20 по Рез. КИОН 44. Также для резервного управления системами КПНО 21 при отказе БЦВМ 30 введены Рез. КИО 43 от КСС 1.
Самолетный ответчик управления воздушным движением 17 обеспечивает службы организации воздушного движения информацией о характеристиках и положении летательного аппарата с помощью АС 18, которая обеспечивает трансляцию сигналов от СО УВД 17 в наземные службы по радиоканалу.
Система контроля и регистрации параметров 40 обеспечивает регистрацию параметров работы бортовых комплексов и отдельных систем, действий экипажа по их применению, а также сохранение информации о параметрах полета и работоспособности систем летательного аппарата. Информация для регистрации и записи передается в СКРП 40 по МКИО 41 и по КИО 42.
Пилотажно-аэрометрическое оборудование 45 обеспечивает формирование пилотажных-аэрометрических параметров (истинные углы атаки и скольжения, абсолютная и относительная высота, приборная и истинная скорость, вертикальная бароинерциальная скорость). Данные параметры передаются по КИО 42 в КСУ 20 и используются для управления движением летательного аппарата.
Общесамолетное оборудование 19 включает системы электроснабжения, топливную систему, гидросистему, системы силовой установки, которые выполняют общесомолетные функции по обеспечению электропитанием, гидропитанием для рулевых приводов, функционирование двигателя летательного аппарата и т.д. ОСО 19 сопрягается с ИУС 27 для контроля и управления по МКИО 41 и КИО 42, а также для обеспечения резервного контроля и управления при отказе БЦВМ 30 с КСС 1 по Рез. КИО 43.
Комплексная система управления 20 обеспечивает управление движением летательного аппарата по сигналам от БЦВМ 30 (функция системы управления самолетом) или по сигналам дистанционного пилотирования от экипажа (функция дистанционного управления) путем формирования и передачи сигналов управления на исполнительные устройства системы управления. Управление движением осуществляется с учетом ограничений предельных режимов полета и навигационных расчетов. Для повышения надежности управления движением в КСУ 20 частично реализован блок навигационных расчетов (для решения навигационной задачи при отказе БЦВМ), который обеспечивается навигационной информацией от КПНО 21 по Рез. КИОН 44. Также управление движением обеспечивается блоком HP 32 в БЦВМ 30, параметры из которого передаются в КСУ 20 по МКИО 41 и КИО 42. Передача сигналов дистанционного пилотирования от КСС 1 в КСУ 20 и передача текущих значений пилотажных параметров летательного аппарата от КСУ 20 в КСС 1 осуществляется по КИОДП 47.
Информационно-управляющая система 27 предназначена для функциональной, логической информационной и программной увязки систем КБО и ОСО в единую интегрированную систему.
Блок-концентратор сигналов 28 из состава ИУС 27 обеспечивает преобразование принимаемой от бортового оборудования информации: аналоговой в цифровой формат, цифровой в аналоговый формат, а также для преобразования цифровой информации в силовые электрические сигналы. БКС 28 используется для преобразования в необходимый вид (преобразование из аналогового вида в цифровой) и трансляции сигналов от бортовых систем в БЦВМ 30 для обеспечения ее функционирования, а также для управления бортовыми системами с помощью силовых команд управления (преобразование цифровых команд управления в аналоговые сигналы). Сопряжение БКС 28 с БЦВМ 30 обеспечивается по МКИО 41, сопряжение БКС 28 с бортовыми системами обеспечивается по КИО 42.
ВЗУ 29 обеспечивает ввод базы данных полетного задания в БЦВМ 30 с помощью модуля памяти, который подключается к ВЗУ 29.
Бортовая цифровая вычислительная машина 30 является основным вычислительным ядром интегрированного комплекса бортового оборудования и обеспечивает интеграцию систем КБО в единый комплекс за счет использования БУР 31, HP 32, УОСО 33, БДПЗ 34, КСО 35, ТЕХО 36, КИС 37, УЗСОК 38, ВВОУ 39. Сопряжение блоков 31-39 обеспечивается с помощью внутреннего канала информационного обмена 48 для их функциональной интеграции.
БУР 31 предназначен для согласованного выполнения текущей задачи всеми системами ИКБО путем назначения режимов работы комплекса бортового оборудования, а также для автоматического принятия решений по управлению ИКБО. Для выполнения указанных задач БУР 31 получает необходимую информацию о параметрах полета от HP 32, о состоянии бортовых систем от КИС 37 и ТЕХО 36 с помощью ВКИО 48. Также текущий режим работы ИКБО и его изменения передаются в бортовые системы через ВВОУ 39.
Блок навигационных расчетов 32 предназначен для управления системами КПНО 21 (интеграция навигационных систем) и для обеспечения управления движением в соответствии с навигационной информацией и в соответствии с полетным заданием, а также для формирования обработанной навигационной информации для экипажа наземного пункта контроля и управления. Параметры полетного задания передаются от БДПЗ 34, навигационные параметры передаются от КПНО 21 через ВВОУ 39 и параметры, обеспечивающие управление движением, передаются в КСУ 20 через ВВОУ 39. Обработанная навигационная информация передается в КСС 1 через КСО 35. Также функции блока HP 32 частично резервируются в КСУ 20 для управления движением при отказе БЦВМ 30, данное резервирование обеспечивается за счет сопряжения КСУ 20 и КПНО 21 по резервному КИОН 44 (обеспечение КСУ 20 навигационной информацией от КПНО 21) и за счет сопряжения КСУ 20 и КСС 1 по резервному КИО 43 (обеспечение экипажа наземного пункта контроля и управления обработанной навигационной информацией).
Блок управления общесамолетным оборудованием 33 обеспечивает управление системами ОСО 19 с учетом навигационных параметров от HP 32 и с учетом состояния систем ОСО от КИС 37 и ТЕХО 36.
База данных полетного задания 34 обеспечивает прием полетного задания от ВЗУ 29, его хранение и выдачу потребителям для работы. Полетное задание используется для обеспечения управления движением в HP 32 и в КСУ 20, а также для настройки систем КБО в КСС 1, КПНО 21 и СО УВД 17.
КСО 35 обеспечивает сбор от БУР 31, HP 32, ТЕХО 36, КИС 37, от систем КБО, ОСО 19, обработку и передачу в КСС 1 пакетов информации для обеспечения формирования индикации экипажу в наземном пункте контроля и управления. Также КСО 35 обеспечивает многоканальное сопряжение между КСС 1 и БЦВМ 30, что позволяет резервировать передачу информации от наземного пункта контроля и управления и обработку информации, получаемой от КСС 1.
Блок ТЕХО 36 обеспечивает расширенный наземный контроль бортовых систем БПЛА за счет назначения режима контроля в отдельной системе с последующем сбором и обработкой результатов контроля в ТЕХО 36. ТЕХО 36 отправляет команды в бортовые системы и получает результаты контроля через ВВОУ 39. Для согласованного выполнения задачи контроля ТЕХО 36 взаимодействует с БУР 31.
Блок КИС 37 обеспечивает сбор информации о состоянии бортовых систем через ВВОУ 39 (параметры полетного контроля), анализ информации о состоянии бортовых систем и передачу результатов анализа в КСО 35 для последующей индикации в наземном пункте контроля и управления. Также результаты анализа состояния бортовых систем передаются в БУР 31 для обеспечения управления ИКБО в зависимости от состояния ботового оборудования.
Блок УЗСОК 38 обеспечивает сбор параметров работы БЦВМ 30, включая параметры работы блоков 31-37 и 39, для их дальнейшей передачи в СКРП 40 для регистрации и записи.
ВВОУ 39 обеспечивает организацию обмена между бортовыми системами по МКИО 41, а также обеспечивает прием информации от бортовых систем и передачу информации от БЦВМ 30 в бортовые системы по КИО 42.
Качественные улучшения комплекса бортового оборудования по сравнению с аналогами обеспечиваются за счет:
- повышения уровня интеграции и автоматизации в БЦВМ 30 и реализации канала дистанционного пилотирования КИОДП 47, что позволяет исключить системы информационно-управляющего поля из состава КБО и системы жизнеобеспечения экипажа;
- резервирования функций блока навигационного расчета в БЦВМ 27 и КСУ 20, что позволяет реализовать резервное автоматическое управление при отказе БЦВМ 27 без необходимости вмешательства экипажа, но с сохранением функций контроля за счет использования Рез. КИО 43 и Рез. КИОН 44;
- использования посадочных систем, основанных на разных физических принципах (например, отклонение от посадочной траектории формируется с использованием сигналов от наземных радиотехнических систем в РТСНП 24 и с использованием сигналов от спутниковых навигационных систем в ССНП 25), что обеспечивает повышение точности и надежности формирования навигационной информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| СПОСОБ УПРАВЛЕНИЯ БОРТОВЫМ ОБОРУДОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2828758C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА МНОГОФУНКЦИОНАЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476920C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| Способ управления беспилотным летательным аппаратом | 2019 |
|
RU2729905C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |

Изобретение относится к области авиационной техники, а именно к системам управления летательными аппаратами. Интегрированный комплекс бортового оборудования беспилотного летательного аппарата содержит взаимосоединенные по мультиплексному каналу информационного обмена и по каналу информационного обмена системы: комплекс пилотажно-навигационного оборудования, комплекс средств связи, информационно-управляющую систему, самолетный ответчик управления воздушным движением с антенной системой, комплексную систему автоматического управления движением, систему контроля и регистрации параметров полета и работы бортового оборудования, пилотажное аэрометрическое оборудование. Технический результат – повышение автономности и автоматизации комплекса бортового оборудования, повышение надежности и эффективности применения беспилотного летательного аппарата. 1 ил.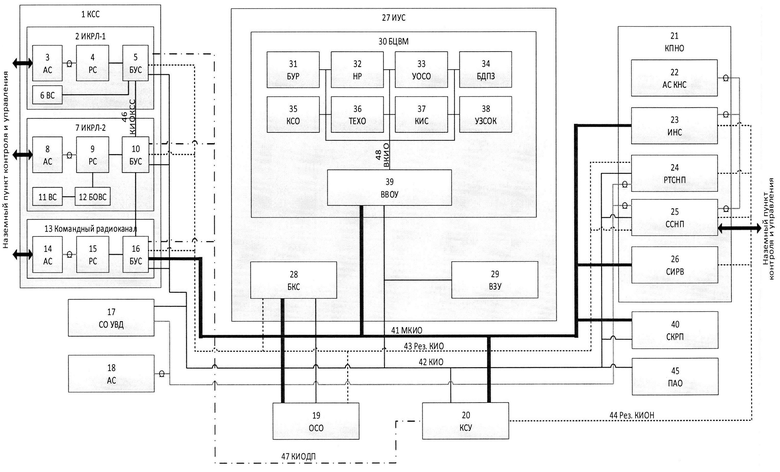
Интегрированный комплекс бортового оборудования беспилотного летательного аппарата, характеризующийся тем, что он содержит взаимосоединенные по мультиплексному каналу информационного обмена и по каналу информационного обмена (КИО) системы: комплекс пилотажно-навигационного оборудования в составе антенной системы космических навигационных систем, инерциальной навигационной системы, радиотехнической системы навигации и посадки, спутниковой системы навигации и посадки и системы измерения радиовысоты; комплекс средств связи с радиоканалами различного диапазона длин волн в составе первой информационно-командной радиолинии, включающей первый блок управления и сопряжения, радиостанцию, первую антенную систему и первую видеосистему, второй информационно-командной радиолинии, включающей второй блок управления и сопряжения, радиостанцию, вторую антенную систему, вторую видеосистему и блок обработки видеосигналов, и командного радиоканала, включающего третий блок управления и сопряжения, радиостанцию и третью антенную систему; информационно-управляющую систему, включающую бортовую цифровую вычислительную машину (БЦВМ), блок-коммутатор сигналов и внешнее запоминающее устройство; общесамолетное оборудование; комплексную систему автоматического управления движением; систему контроля и регистрации параметров полета и работы бортового оборудования; а также содержит связанные между собой, комплексами и БЦВМ по КИО, пилотажное аэрометрическое оборудование и самолетный ответчик управления воздушным движением с антенной системой, обеспечивающей взаимодействие с органами управления воздушным движением, прием данных дифференциальных поправок от наземной станции, измерение отклонений от центра равносигнальной зоны пространственного радиополя.
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263045C1 |
| CN 102915038 A, 06.02.2013. | |||

