Изобретение относится к авиационной технике, а именно к системам автоматического управления и принятия решений, и может быть использовано при проектировании систем автоматического управления беспилотных летательных аппаратов.
В целях повышения безопасности выполнения полета беспилотного летательного аппарата (БПЛА) в алгоритм управления введены команды завершения этапов полета, которые замещают собой функционал экипажа по принятию решений. Данное замещение необходимо из-за специфики БПЛА (экипаж находится удаленно от летательного аппарата), что приводит к возникновению задержек в канале управления, а также из-за высокой вероятности отсутствия связи между экипажем и летательным аппаратом, так как она осуществляется по радиоканалу. Из-за возникновения задержек в канале управления между экипажем и БПЛА требуется автоматическое принятие решения в быстро протекающих процессах, где величина задержки соизмерима со временем переходного процесса, к примеру:
- пропадание взаимодействия между экипажем и БПЛА по радиоканалам, что приводит к невозможности управления экипажем и к необходимости автономного автоматического принятия решения о прерывании выполнения программы полета с последующей посадкой;
- возникновение отказов бортовых систем на конечном этапе разбега при автоматическом взлете, которые требуют прекращения разбега из-за возможности развития отказов в полете и возникновения катастрофической или аварийной ситуации.
Конечный этап разбега наиболее критичен, так как из-за ограничений по оставшейся длине взлетно-посадочной полосы (ВПП) и из-за небольшого интервала времени до окончания разбега с последующим отрывом от ВПП решение о прекращении разбега должно приниматься с минимальными задержками, однако при принятии решения экипажем суммарная задержка состоит из времени анализа состояния бортового оборудования, времени принятия решения и времени передачи команды. В итоге указанная задержка принятия решения экипажем приводит к невозможности прекращения разбега из-за запаздывания управления и к необходимости выполнения отрыва от ВПП и последующему выполнению подъема, что при наличии отказов может привести к более тяжелым последствиям, чем прекращение разбега. Для прекращения разбега и недопущения отрыва от ВПП при возникновении отказов на конечном участке разбега принятие решения должно выполняться автоматически без участия экипажа с учетом анализа состояния бортового оборудования и ограничений по оставшейся длине ВПП. Автоматизация принятия решения позволит существенно сократить время принятия решения, что, в свою очередь, позволит прекращать разбег при возникновении отказов даже на конечном этапе разбега.
В уровне техники известен способ управления летательным аппаратом (WO 2014138441 А1), включающий этапы, на которых анализируют информацию о состоянии оборудования, выводят индикацию экипажу об отказе и о наличии или отсутствии возможности торможения до конца ВПП с учетом приборной скорости. Описанный способ не предусматривает возможность автоматического торможения или взлета, а лишь оказывает помощь пилоту в принятии решения.
Известен способ управления летательным аппаратом (US 2017341772 А1), в котором анализируют информацию о состоянии двигателя, а в случае обнаружения его отказа, приводящего к снижению уровня тяги, или пожара и приборной скорости менее скорости принятия решения осуществляют автоматическое торможение и прекращают разбег. Недостатком данного способа является анализ только двух отказов двигателя в виде снижения уровня тяги и пожара для автоматического торможения и отсутствие анализа других отказных ситуаций, которые могут привести к авиационному происшествию в случае продолжения взлета. Такими ситуациями могут быть отказы в системе электроснабжения, которые приводят к выключению всех радиоэлектронных систем и невозможности управления летательным аппаратом, отказы в гидросистеме, которые приводят к невозможности отклонения рулевых поверхностей и выпуска шасси, отказы в топливной системе, которые приводят к выключению двигателя из-за отсутствия подкачки топлива, отказы пилотажно-навигационного оборудования, которые приводят к невозможности управления летательным аппаратом или выполнения посадки в сложных метеоусловиях, пожар вспомогательной силовой установки.
В качестве прототипа выбран способ управления БПЛА (RU 2634470 С2), включающий формирование и передачу сигналов управления с командного пункта на борт летательного аппарата с использованием комплекса средств связи (КСС), взаимодействующего с бортовой цифровой вычислительной машиной (БЦВМ), анализ информации о состоянии оборудования, а также выполнение возврата и посадки в случае обнаружения отказа. Недостатками данного способа являются: недостаточный сбор информации о состоянии оборудования, так, например, отказ по потери связи определяется только по соотношению сигнал/шум; отсутствие учета состояния пилотажно-навигационного оборудования и топливной системы, которые обеспечивают выполнение полета; нет анализа возможности управления БПЛА оператором при наличии связи по соотношению сигнал/шум, то есть не учитываются случаи отсутствия поступления команд управления и отказа наземного пункта управления при наличии связи.
Задачей настоящего изобретения является создание решения, позволяющего снизить вероятность возникновения катастрофических или критических ситуаций во время выполнения полета за счет автоматического принятия решений по завершению этапов полета и за счет программной блокировки ошибочных действий экипажа.
Технический результат заключается в повышении безопасности полета БПЛА за счет автоматизации принятия решений при возникновении отказных ситуаций.
Указанный результат достигается в способе управления БПЛА, характеризующемся тем, что осуществляют формирование и передачу сигналов управления с командного пункта на борт летательного аппарата с использованием КСС, взаимодействующего по пяти линиям связи с БЦВМ, посредством которой осуществляют проверку обжатия опор шасси и анализ информации о состояниях бортовых систем, линий связи и командного пункта, причем при обнаружении отказа по меньшей мере одной бортовой системы или не менее трех линий связи, или командного пункта, и при отсутствии обжатия опор шасси выполняют возврат и посадку, а при наличии обжатия опор шасси и приборной скорости менее скорости принятия решения прекращают разбег.
Отказ линии связи могут формировать при наличии любого из нижеследующего: отсутствия информационного обмена, отсутствия изменения счетчика исправности КСС, отсутствия изменения счетчика обмена КСС.
В случае обнаружения отказа при наличии обжатия опор шасси и приборной скорости более скорости принятия решения могут выполнять взлет с последующим заходом на посадку.
Выполнение соединения КСС с БЦВМ по пяти линиям связи, анализ состояния бортовых систем, командного пункта и пяти указанных линий, а также осуществление возврата или торможения с прекращением разбега в случае обнаружения отказа позволяют повысить безопасность полета БПЛА.
Предлагаемое решение поясняется на фиг. 1-3.
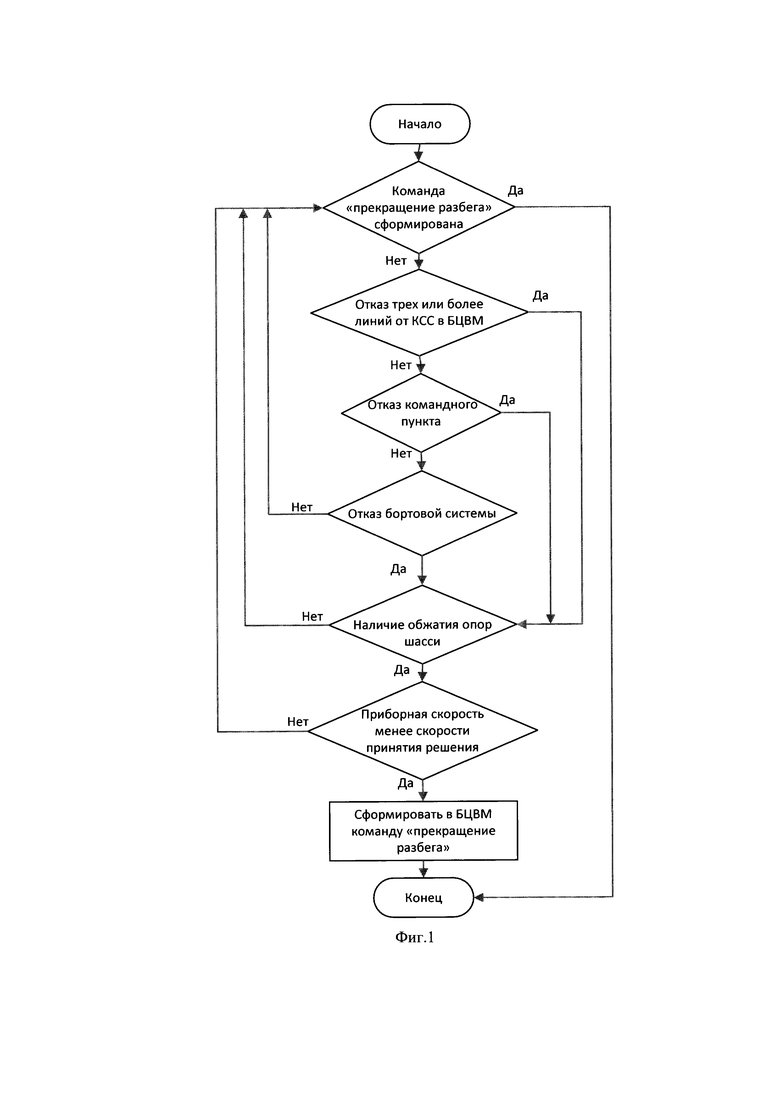
На фиг. 1 показана схема формирования в БЦВМ команды «прекращение разбега».
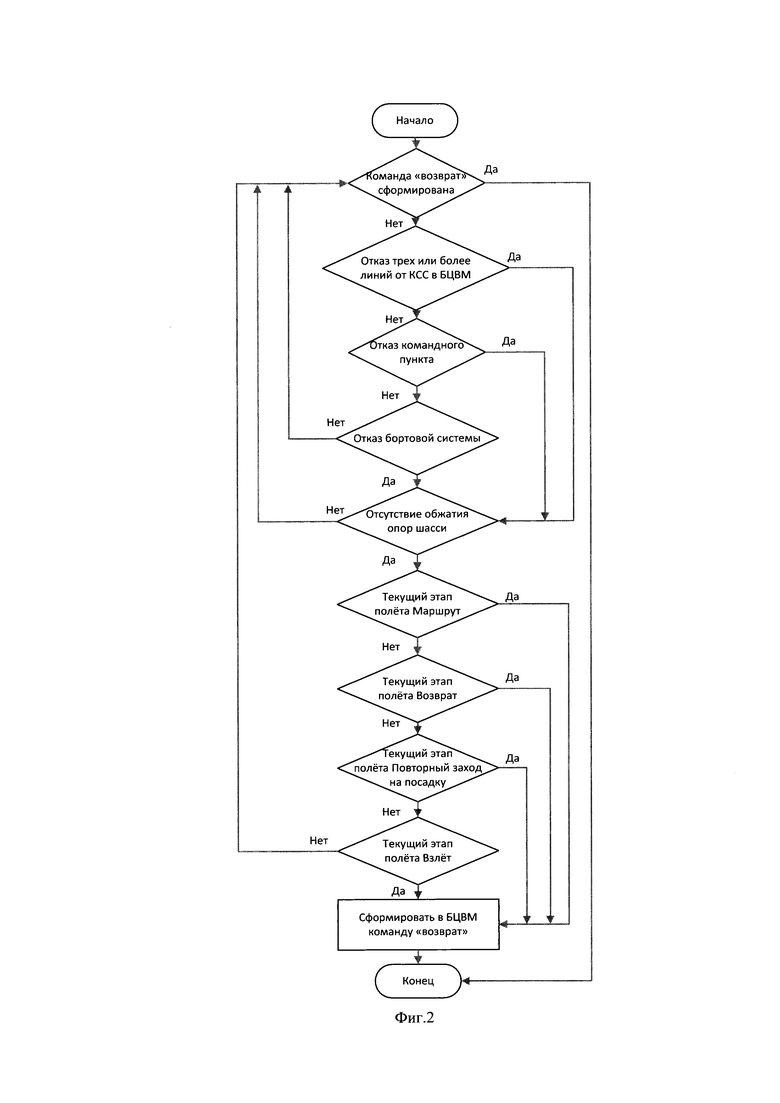
На фиг. 2 показана схема формирования в БЦВМ команды «возврат».
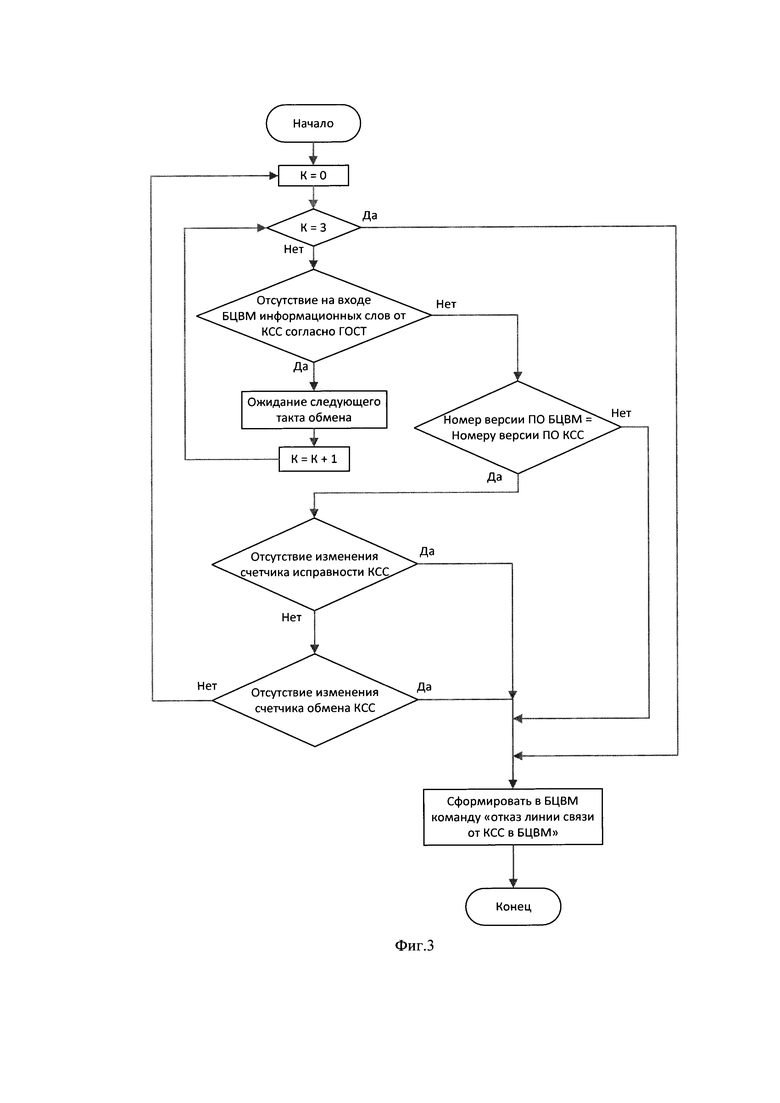
На фиг. 3 показана схема формирования в БЦВМ команды «отказ линии связи».
Способ управления БПЛА содержит этапы, на которых формируют и передают сигналы управления с командного пункта на борт летательного аппарата. Так, при нахождении БПЛА на территории аэродрома осуществляют ограниченное управление для руления, то есть изменяют скорость и курс, а при взлете, посадке и нахождении аппарата в воздухе осуществляют изменение высоты, скорости и курса, а также производят управление пилотажно-посадочным оборудованием.
Описанное управление осуществляют посредством радиосвязи с использованием работы КСС БПЛА, взаимодействующего с БЦВМ по пяти линиям связи. При этом четыре из них - линии двухполярного последовательного кода (ДПК), выполненные согласно ГОСТ 18977-79 и РТМ 1495-75, и две линии мультиплексного канала информационного обмена (МКИО), выполненные согласно по ГОСТ Р 52070-2003. Так как две линии МКИО работают в горячем резерве, и при отказе одной линии осуществляется переход на вторую линию, а в случае отказа второй линии осуществляется обратный переход на первую, то линии МКИО анализируются в БЦВМ как одна. Обмен по каждой линии ДПК осуществляется независимо.
Использование пяти линий связи позволяет реализовать в БЦВМ комплексную обработку информации, которая поступает от КСС, что обеспечивает сохранение надежного взаимодействия в случае отказа одной или нескольких линий связи, а также обеспечивает выявление и отбраковку в БЦВМ ложных сигналов от КСС в случае возникновения ошибок (битовые ошибки, формирование ложных сигналов из-за программных сбоев и др.) в радиообмене или в обмене по линиям связи.
Другим этапом способа является проверка обжатия опор шасси и анализ информации о состоянии бортовых систем, линий связи и командного пункта (фиг. 1-2), что осуществляется с помощью БЦВМ. Проверку обжатия проводят для определения текущего этап полета. При наличии обжатия опор шасси принимается этап «разбег», при отсутствии обжатия принимаются этапы «маршрут», «возврат», «повторный заход на посадку» и «взлет».
В случае обнаружения отказа как минимум одного из перечисленного: по меньшей мере одной бортовой системы, не менее трех линий связи, командного пункта и при одновременном отсутствии обжатия опор шасси выполняют возврат и посадку, а при наличии обжатия опор шасси и приборной скорости менее скорости принятия решения прекращают разбег (фиг. 1-2).
Учет скорости принятия решения производят для проверки возможности безопасной остановки в пределах ВПП, так как масса и ускорение БПЛА известны, то из текущей скорости рассчитывается расстояние до окончания ВПП и определяется, укладывается в это расстояние тормозной путь или нет. Соответственно, если скорость более скорости принятия решения, то следует осуществлять взлет с последующим заходом на посадку, так как в пределах ВПП затормозить невозможно.
В БЦВМ осуществляется обнаружение отказа командного пункта при поступлении с него соответствующего аварийного сигнала о невозможности передачи сформированных сигналов управления.
Обнаружение отказа по меньшей мере одной бортовой системы такой, как двигателя, гидросистемы, топливной системы, системы электроснабжения, систем пилотажно-навигационного оборудования, а также других общеприменимых и известных систем, производится известными в уровне техники средствами и методами, включая обнаружение предотказных состояний, вызванных нарушениями в работе указанных систем. Так, например отказ двигателя определяется с помощью датчиков, измеряющих обороты, давление, температуру масла и топлива, наличие пожара. Отказ гидросистемы определяется с помощью датчиков, измеряющих давление гидросистемы и температуру рабочей жидкости гидросистемы. Отказ топливной системы определяется с помощью измеряющих расход, давление и запас топлива датчиков. Отказ системы электроснабжения определяется с помощью датчиков, определяющих работоспособность генераторов и преобразующих устройств, а отказ систем пилотажно-навигационного оборудования определяется с помощью датчиков, измеряющих пилотажные параметры и определяющих отклонение пилотажно-навигационных систем от измеренных параметров.
Сигнал управления, поступивший по трем или более линиям от КСС в БЦВМ и хранящийся более секунды, воспринимается как достоверный и берется в работу. Поэтому отказ не менее трех линий связи от КСС в БЦВМ воспринимается как отказ управления, так как остается только две линии, не обеспечивающих достоверную передачу сигналов управления.
Обнаружение отказа линии связи (фиг. 3) происходит при наличии любого из нижеследующего: отсутствия информационного обмена, отсутствия изменения счетчика исправности КСС, отсутствия изменения счетчика обмена КСС, а также могут проверяться номера версии программного обеспечения (ПО) КСС и ПО БЦВМ.
Счетчик исправности КСС обновляется всегда при штатной работе КСС и предназначен для контроля состояния КСС, например, при зависании ПО КСС счетчик перестает обновляться, и формируется отказ линии, при этом информация может продолжать передаваться, но будет недостоверна.
Счетчик обмена КСС обновляется всегда при наличии информационного обмена с командного пункта на борт по радиосвязи. При отсутствии информационного обмена (нет поступления новых достоверных пакетов информации по радиосвязи) счетчик обмена не обновляется и в БЦВМ формируется отказ линии. Данный счетчик необходим, так как КСС это система, обеспечивающая трансляцию сигналов управления с командного пункта на борт. Отсутствие достоверных сигналов управления анализируется как функциональный отказ КСС, не смотря на то, что обмен информацией между КСС и БЦВМ может быть исправен и может осуществляться трансляция последних достоверных значений, однако в работу они не принимаются, так как командным пунктом могли быть сформированы другие сигналы управления. При этом достоверность сигналов управления определяется путем анализа поступивших параметров на соответствие диапазону, а также учитывается и сравнивается контрольная сумма пакета.
Указанные счетчики КСС формируются независимо в каждом из каналов КСС и передаются в БЦВМ независимо по линиям связи каждого канала.
Параметры «счетчик исправности» и «счетчик обмена» КСС представляют собой числа, меняющиеся по формуле Tn+1=Tn+1, где Т - это значение счетчика, a n - значение такта обновления счетчика. При достижении своего максимума счетчик сбрасывается на 0 и отсчет начинается сначала.
В качестве примеров использования настоящего способа, рассмотрим следующие ситуации.
В первом случае (фиг. 1) БПЛА находится на территории аэродрома. Команда «прекращение разбега» в БЦВМ не сформирована. По радиосвязи с командного пункта передаются сигналы управления, согласно которым БПЛА выруливает на ВПП, совершает разбег и готовится к взлету. Одновременно посредством БЦВМ осуществляется проверка обжатия опор шасси и анализ информации о состоянии бортовых систем, линий связи и командного пункта. Происходит отказ трех линий связи от КСС в БЦВМ, и так как на данный момент этап полета «разбег», что определено за счет наличия обжатия опор шасси, учитывается текущая приборная скорость и подтверждается, что она не более скорости принятия решения. В связи с указанным, в БЦВМ формируется команда «прекращение разбега» и выполняется торможение на ВПП до остановки.
Во втором случае (фиг. 2) БПЛА находится в воздухе. Команда «возврат» не сформирована. По радиосвязи с командного пункта передаются сигналы управления, согласно которым БПЛА выполняет план полета, команды изменения плана полета или последние сформированные сигналы управления, отработанные БПЛА, в случае отсутствия необходимости вмешательства в управление с командного пункта. В это время происходит проверка обжатия опор шасси и анализ информации о состоянии бортовых систем, линий связи и командного пункта. Происходит отказ командного пункта, о чем на борт посылается соответствующий сигнал, и так как на данный момент этап полета «маршрут», «взлет» или «повторный заход на посадку», что определено за счет отсутствия обжатия опор шасси, в БЦВМ формируется команда «возврат» и автоматически осуществляется смена текущего этапа полета на этап «возврат».
Таким образом, использование предлагаемого изобретения позволяет повысить безопасность полета БПЛА за счет автоматизации процесса принятия решений по завершению этапов полета при возникновении отказных ситуаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2019 |
|
RU2767938C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ЭЛЕКТРОННОЙ ИНДИКАЦИИ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2219108C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ОПОВЕЩЕНИЯ ПИЛОТА О ДИСТАНЦИИ ТОРМОЖЕНИЯ ВОЗДУШНЫХ СУДОВ НА ЭТАПЕ ПОСАДКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2781533C1 |
Изобретение относится к способу управления беспилотным летательным аппаратом. Для этого осуществляют формирование и передачу сигналов управления с командного пункта на борт летательного аппарата с использованием комплекса средств связи, взаимодействующего по пяти линиям связи с бортовой цифровой вычислительной машиной, посредством которой осуществляют проверку обжатия опор шасси и анализ информации о состояниях бортовых систем, линий связи и командного пункта, а при обнаружении отказа по меньшей мере одной бортовой системы или не менее трех линий связи, или командного пункта. При отсутствии обжатия опор шасси выполняют возврат и посадку, а при наличии обжатия опор шасси, и если приборная скорость менее скорости принятия решения прекращают разбег. Обеспечивается повышение безопасности полета. 2 з.п. ф-лы, 3 ил.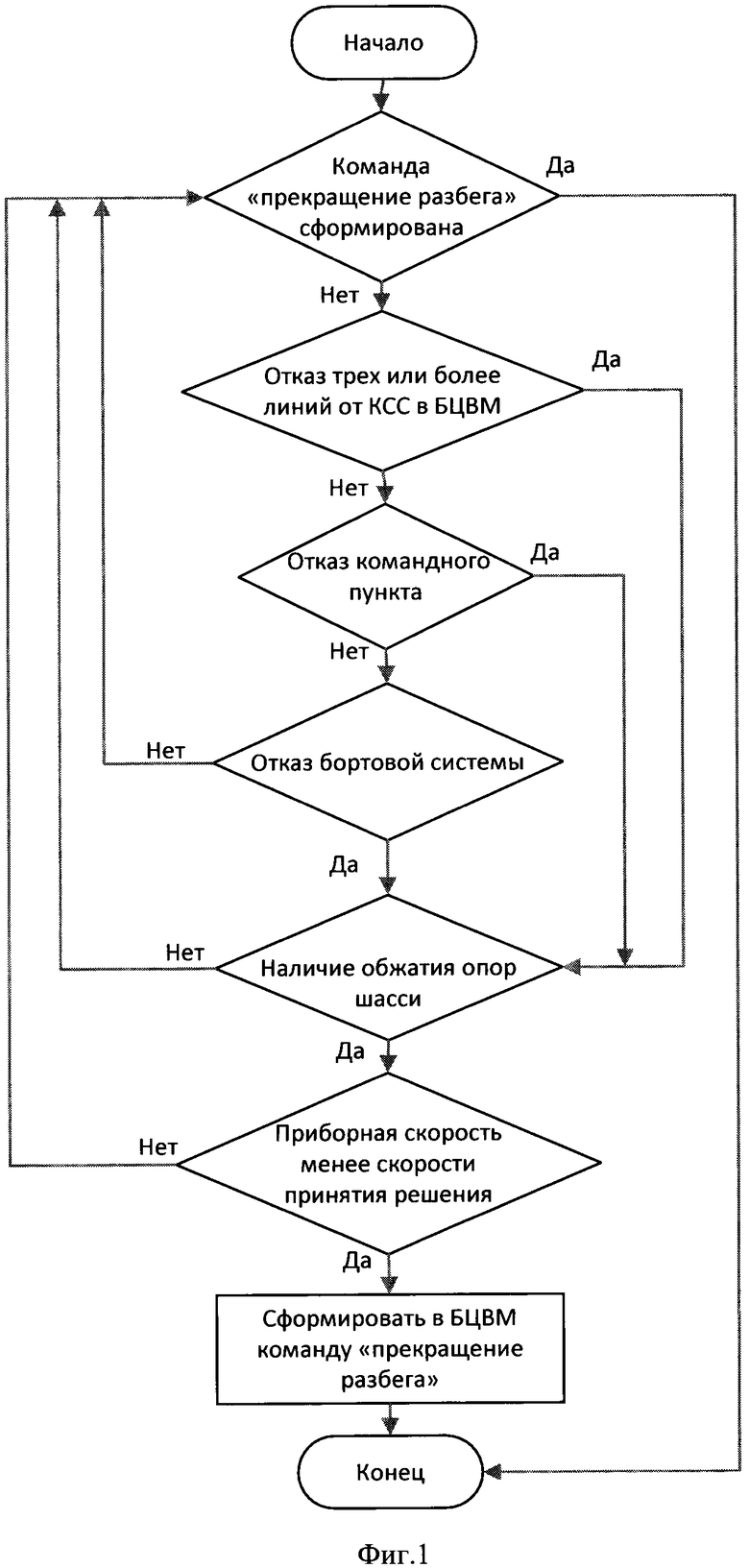
1. Способ управления беспилотным летательным аппаратом, характеризующийся тем, что осуществляют формирование и передачу сигналов управления с командного пункта на борт летательного аппарата с использованием комплекса средств связи, взаимодействующего по пяти линиям связи с бортовой цифровой вычислительной машиной, посредством которой осуществляют проверку обжатия опор шасси и анализ информации о состояниях бортовых систем, линий связи и командного пункта, причем при обнаружении отказа по меньшей мере одной бортовой системы или не менее трех линий связи, или командного пункта, и
при отсутствии обжатия опор шасси выполняют возврат и посадку, а
при наличии обжатия опор шасси и приборной скорости менее скорости принятия решения прекращают разбег.
2. Способ по п. 1, характеризующийся тем, что отказ линии связи формируют при наличии любого из нижеследующего: отсутствия информационного обмена, отсутствия изменения счетчика исправности комплекса средств связи, отсутствия изменения счетчика обмена комплекса средств связи.
3. Способ по п. 1, характеризующийся тем, что в случае обнаружения отказа при наличии обжатия опор шасси и приборной скорости более скорости принятия решения выполняют взлет с последующим заходом на посадку.
| БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА КОМПЛЕКСОВ УПРАВЛЕНИЯ И НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2392194C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| 0 |
|
SU155323A1 | |
| CN 0105644800 A,08.06.2016 | |||
| US 0009045237 B2, 02.06.2015. | |||

