Изобретение относится к средствам обеспечения навигации и маневрирования водного транспорта, а также мониторинга показателей или эксплуатационных параметров судов во время работы.
При эксплуатации различных транспортных средств в настоящее время широко используются спутниковые систем глобального позиционирования и навигации (ГЛОНАСС, GPS, Galileo, Compass). При этом на транспортное средство устанавливается соответствующее приёмное устройство и монитор, отображающий своё текущее положение и дополнительную навигационную информацию, например, патент RU 2394719 С2. Точность позиционирования транспортного средства с помощью спутниковых систем глобального позиционирования и навигации не превышает 0,5 м и обычно составляет единицы метров (https://omnicomm.su/about/news/sistema-glonass-era-glonass-i-gps-kak-rabotaet-i-dlya-chego-nuzhna-/). Однако для маневрирования водными транспортными средствами, обладающими большими габаритами и массой, особенно на опасных участках внутренних водных путей, в каналах, шлюзах, при швартовке, такая точность недостаточна.
Для повышения точности позиционирования движущегося водного транспортного средства информация спутниковой системы позиционирования дополняется данными бортовых измерительных устройств текущих параметров движения транспортного средства: путевого угла, угловой скорости поворота в горизонтальной плоскости, вектора скорости поступательного движения, силы тяги движителей, например, патенты RU 2403169 С1, RU 2406645 С1.
Для позиционирования водного транспортного средства в вертикальной плоскости относительно свободной поверхности воды применяются датчики осадки водных транспортных средств, например, RU 2151710 С1, RU 2284944 С2, RU 2668003 С1. Однако такой способ позиционирования не даёт критически важной для безопасности водного транспортного средства информации о расстоянии от нижней точки днища транспортного средства до верхней точки препятствия на дне опасного участка фарватера.
Следующим шагом в направлении повышения точности позиционирования движущегося водного транспортного средства является применение наземных средств навигации – створных маяков, оптических, лазерных или микроволновых, в сочетании с бортовыми приёмными устройствами, позволяющими вычислять координаты движущегося водного транспортного средства относительно этих маяков, например, RU 2263329 С1, RU 2411159 С1, RU 2491204 С1, US 2007236389 A1. По сравнению со спутниковыми системами глобальной навигации такие системы позволяют повысить точность позиционирования на два порядка за счёт того, что расстояние от транспортного средства до наземного маяка на три порядка меньше, чем до навигационного спутника. Однако перечисленные технические решения не предполагают 3D–позиционирования водных транспортных средств, т.к. не требуют обязательного размещения нескольких маяков на различных высотах относительно водного транспортного средства. В случае если все маяки и водное транспортное средство размещены в одной плоскости, определение координат вдоль оси, ортогональной этой плоскости, невозможно.
Комплексное решение для обеспечения безаварийного движения надводного или подводного судна при наличии подводных или надводных потенциально опасных объектов за счёт высокоточного позиционирования этих опасных объектов относительно судна изложено в патенте RU 2513198 С2. Описан способ обеспечения безаварийного движения надводного или подводного судна при наличии подводных и надводных потенциально опасных объектов, который включает постоянный приём спутниковых навигационных данных, данных от радиолокационной станции, автоматической идентификационной системы, определение местоположения судна, вычисление скорости судна, глубины под килем. Дополнительно включают операции, согласно которым получают трёхмерное изображение подводной обстановки со всех сторон судна, спереди, с боков и сзади, для чего используют гидролокаторы в передней, задней, левой и правой областях, в случае обнаружения потенциально опасных объектов распознают их либо самим судоводителем, либо распознающим устройством и выбирают оптимальный способ предотвращения столкновения судна с потенциально опасным объектом, и рассчитывают траекторию уклонения от потенциально опасного объекта. Таким образом повышается вероятность безаварийного движения надводного и подводного судна в различных потенциально опасных аварийных ситуациях. Особенностью данного технического решения является сосредоточение всех средств навигации и измерения на борту судна, что обеспечивает максимальную автономность навигации и независимость от наличия береговой инфраструктуры.
В условиях плавания по внутренним водным путям может быть полезен альтернативный подход: на водных транспортных средствах размещается минимальный состав навигационного оборудования, а основные части системы высокоточного 3D – позиционирования сосредоточены на опасных участках водных путей, в первую очередь, в судоходных гидротехнических сооружениях. Целесообразность такого подхода определяется соотношением числа речных судов и подлежащих декларированию безопасности гидротехнических сооружений. Например, в Российской Федерации число речных судов превышает 30000 единиц (https://poisk-ru.ru/s7493t6.html), а число подлежащих декларированию безопасности гидротехнических сооружений составляет 332 (http://morflot.gov.ru/deyatelnost/napravleniya_deyatelnosti/rechnoy_flot/vvt/sudohodnyie_gidrotehnicheskie_soorujeniya.html). Кроме того, высокоточное 3D–позиционирование в пунктах проведения погрузочно-разгрузочных работ позволит контролировать важные эксплуатационные параметры судов: крен, дифферент, прогиб (перегиб) корпуса судна.
В качестве прототипа выбран патент US 5696514 A «Система измерения местоположения и скорости с использованием атомных часов в движущихся объектах и приёмниках». В соответствии с п.10 формулы изобретения заявлено «Устройство для определения местоположения подвижного объекта, содержащее: передающее средство, переносимое этим подвижным объектом для передачи когерентного сигнала, содержащего точную частоту; и приёмное средство, содержащее множество разнесенных друг от друга приёмных станций, средство определения времени распространения для того, чтобы указанный переданный сигнал достиг каждой из указанных приёмных станций, средство определения составляющей скорости по разности частот указанного переданного когерентного сигнала, принятого на каждой приёмной станции, и указанной точной частоты, и процессорное средство определения указанного местоположения по времени распространения для того, чтобы указанный переданный когерентный сигнал достиг каждой станции, и разрешения любых неоднозначностей в указанном местоположении, полученных из указанного времени распространения переданных сигналов, с использованием указанных составляющих скорости».
Недостатком применения прототипа в качестве системы высокоточного локального позиционирования водных транспортных средств для навигации и маневрирования на опасных участках внутренних водных путей является наличие единственной передающей станции на борту. Это не позволяет выполнить 3D–позиционирование водного транспортного средства как твёрдого тела конечных размеров, что принципиально необходимо для навигации и маневрирования на опасных участках внутренних водных путей, в первую очередь, в судоходных гидротехнических сооружениях.
Технологическая проблема, решаемая изобретением, – создание системы высокоточного локального 3D–позиционирования водных транспортных средств для навигации и маневрирования на опасных участках внутренних водных путей, в первую очередь, в судоходных гидротехнических сооружениях, в которой основная часть оборудования размещается на берегу, а бортовая часть оборудования минимальна.
Технический результат – повышение безопасности судоходных гидротехнических сооружений на внутренних водных путях за счёт повышения точности 3D–позиционирования водных транспортных средств в судоходных гидротехнических сооружениях.
Указанный технический результат достигается тем, что система высокоточного локального 3D–позиционирования водных транспортных средств для навигации и маневрирования на опасных участках внутренних водных путей, содержит комплекс бортового оборудования и комплекс берегового оборудования, связанные между собой несколькими радиолиниями навигации и связи, причём, комплекс бортового оборудования включает в себя бортовую передающую станцию, излучающую в окружающее пространство непрерывные немодулированные или модулированные радиосигналы сверхвысоких частот, а комплекс берегового оборудования включает в себя блок вычислительный, к которому подключены разнесённые в пространстве станции приёма сигналов и блок графического отображения навигационной информации, в состав комплекса бортового оборудования входит не менее трёх бортовых передающих станций, которые синхронизированы общим высокостабильным генератором опорных колебаний, разнесены друг от друга на максимально возможное расстояние и расположены не на одной прямой, в состав комплекса бортового оборудования дополнительно включено бортовое терминальное оборудование радиолинии связи «борт–берег», в составе комплекса берегового оборудования используется не менее шести станций приёма сигналов, расположенных не в одной плоскости, к блоку вычислительному дополнительно подключены: автоматический измеритель уровня воды в судоходном гидротехническом сооружении, блок памяти, содержащий актуальную базу данных цифровых 3D – моделей водного транспортного средства и рельефа дна судоходного гидротехнического сооружения, а также береговое терминальное оборудование радиолинии связи «борт–берег», соединённое по радиолинии с бортовым терминальным оборудованием радиолинии связи «борт–берег».
Приёмные станции в составе комплекса берегового оборудования выполнены по супергетеродинной схеме с общим гетеродином, синхронизированным высокостабильным генератором опорных колебаний.
Изобретение поясняется иллюстрациями, на которых изображено:
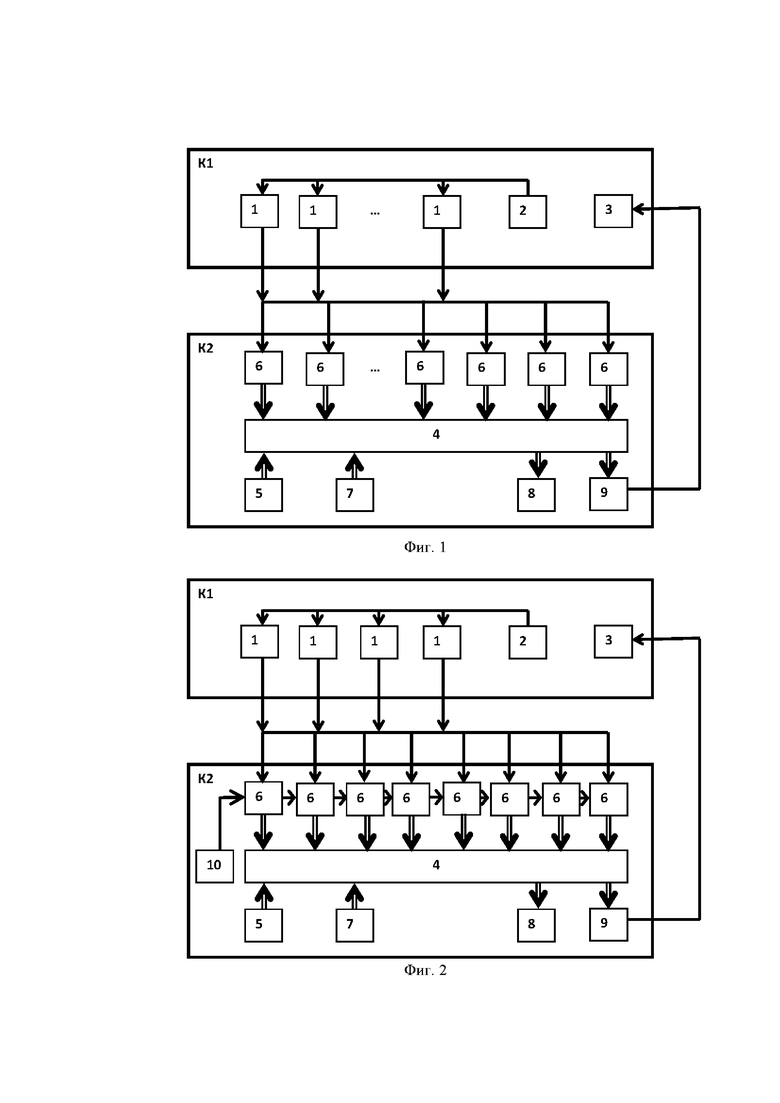
Фиг. 1 – Структурная схема системы высокоточного локального 3D–позиционирования водных транспортных средств;
Фиг. 2 – Конкретный пример системы.
Структура системы высокоточного локального 3D–позиционирования водных транспортных средств поясняется схемой, изображённой на фиг. 1.
Система содержит комплекс бортового оборудования и комплекс берегового оборудования, связанные между собой несколькими радиолиниями навигации и связи.
Комплекс бортового оборудования (К1) включает в себя:
- не менее трёх бортовых передающих станций (1), излучающих в окружающее пространство непрерывные немодулированные или модулированные радиосигналы сверхвысоких частот. Центры излучения передающих антенн трёх бортовых передающих станций, конструктивно жёстко связанных с корпусом водного транспортного средства и расположенных не на одной прямой, являются реперными точками на корпусе водного транспортного средства, и координаты этих трёх реперных точек однозначно определяют положение корпуса водного транспортного средства в трёхмерном пространстве. Увеличение числа реперных точек более трёх даёт избыточную информацию о положении позиционируемого объекта, что повышает точность позиционирования за счёт взаимной компенсации ошибок в определении координат реперных точек. Определение координат центров излучения передающих антенн на движущемся транспортном средстве возможно путём определения проекций полного вектора скорости на направления к нескольким, не менее шести, разнесённым в пространстве и расположенным не в одной плоскости неподвижным станциям приёма сигналов. Измерение не менее шести линейно независимых проекций вектора скорости необходимо для однозначного разрешения системы уравнений, включающей в себя шесть независимых неизвестных величин: три координаты реперной точки и три компоненты полного вектора её скорости. Измерение проекции вектора скорости источника радиоволн на направление к точке приёма заключается в измерении доплеровского сдвига частоты принимаемой волны относительно передаваемой. Для измерения разности этих двух частот с требуемой точностью необходимо поддерживать частоту передатчика с требуемой точностью и с максимально возможной точностью измерять частоту принимаемого сигнала. Максимальная точность поддержания частоты передатчика достигается при синхронизации с атомным стандартом частоты и времени (http://www.gaoran.ru/russian/lg/at%26f.html). Максимальная точность оценки частоты достигается при использовании непрерывного немодулированного гармонического колебания (https://digital.gov.ru/uploaded/files/prilozhenie-1-k-16-37-02-dop-k-normam-17- 13.pdf#:~:text=1.2.4%20При%20измерении%20отклонения%20частоты,должны%20 задаваться%20конкретной%20методикой%20измерений - Приложение А, п.А.1.2, стр. 10). Для того чтобы сигналы трёх или более бортовых передающих станций отличались друг от друга при приёме, они должны иметь либо разные частоты, либо иметь уникальную структуру модуляции, например, ортогональными кодами.
- Высокостабильный генератор опорных колебаний (2), подключённый к бортовым передающим станциям (1). Колебания высокостабильного генератора опорных колебаний (2) поступают на опорные входы системы фазовой автоподстройки частоты СВЧ генераторов бортовых передающих станций, задавая требуемый высокий уровень стабильности частоты излучаемых сигналов.
- Бортовое терминальное оборудование радиолинии связи «борт–берег» (3), соединённое по радиолинии с береговым терминальным оборудованием радиолинии связи «борт–берег» (9) и предназначенное, в первую очередь, для приёма навигационной информации, необходимой для маневрирования водного транспортного средства, передаваемой с комплекса берегового оборудования (К2). В аспекте технического результата, достигаемого изобретением, под навигационной информацией понимается текущее положение корпуса водного транспортного средства в судоходном канале гидротехнического сооружения и прогноз этого положения на временной лаг принятия решения.
Комплекс берегового оборудования (К2) включает в себя:
- блок вычислительный (4), соединённый своими входами с выходом автоматического измерителя уровня воды (5), с выходами станций приёма сигналов (6) бортовых передающих станций и с выходом блока памяти (7), содержащего актуальную базу данных 3D–моделей водного транспортного средства и рельефа дна судоходного гидротехнического сооружения, а также соединённый своими выходами с входом блока (8) графического отображения навигационной информации – текущего положения корпуса водного транспортного средства в судоходном канале гидротехнического сооружения и прогноза этого положения на временной лаг принятия решения – и входом берегового терминального оборудованиям радиолинии связи «борт–берег» (9).
- Автоматический измеритель уровня воды (5) в судоходном гидротехническом сооружении с электронной регистрацией результатов измерения и абсолютной погрешностью измерения порядка 1 см, выход автоматического измерителя уровня воды соединён с входом блока вычислительного (4).
- Не менее шести станций приёма сигналов (6) бортовых передающих станций, приёмные антенны станций приёма сигналов жёстко соединены с капитальными конструкциями судоходного гидротехнического сооружения, координаты центров излучения антенн известны и расположены не в одной плоскости, расстояния между всеми приёмными антеннами по возможности максимальны в пределах конкретного судоходного гидротехнического сооружения, выходы станций приёма сигналов бортовых передающих станций соединены с входами блока вычислительного (4).
- Блок памяти (7), содержащий актуальную базу данных цифровых 3D–моделей водного транспортного средства и рельефа дна судоходного гидротехнического сооружения, соединённый своим выходом с входом блока вычислительного (4).
- Блок (8) графического отображения навигационной информации – текущего положения корпуса водного транспортного средства в судоходном канале гидротехнического сооружения и прогноза этого положения на временной лаг принятия решения, соединённый своим входом с выходом блока вычислительного (4).
- Береговое терминальное оборудование радиолинии связи «борт–берег» (9), соединённое своим входом с выходом блока вычислительного (4) и соединённое по радиолинии с бортовым терминальным оборудованием радиолинии связи «борт–берег» (3).
Работа системы проиллюстрирована конкретным примером (фиг. 2). На фигуре 2 обозначения аналогичны обозначениям на фигуре 1. Дополнительно введено устройство (10) – генератор СВЧ, синхронизированный высокостабильным генератором опорных колебаний в составе берегового комплекса. В составе бортового комплекса используются четыре бортовые передающие станции (1), они размещены на носу, на корме и по правому и левому борту миделя корпуса водного транспортного средства. В составе берегового комплекса используются восемь станций приёма сигналов (6), размещённых по правому и левому берегам русла в вершинах куба со стороной, равной ширине русла. Используются непрерывные гармонические сигналы с частотами f1, f2, f3 и f4. Генераторы сигналов всех бортовых передающих станций (1) синхронизируются высокостабильным генератором опорных колебаний (2) с относительной нестабильностью частоты 10-11. В составе береговых станций приёма сигналов (6) используются приёмные устройства супергетеродинного типа, в которых сигнал гетеродина частотой fLO является общим для всех приёмных станций и формируется генератором СВЧ, синхронизированным высокостабильным генератором опорных колебаний в составе берегового комплекса (10), с относительной погрешностью частоты 10-11.
Система работает следующим образом.
Судоводитель водного транспортного средства включает бортовые передающие станции (1) перед входом в судоходное гидротехническое сооружение за время, достаточное для выхода генераторов бортовых передающих станций в рабочий режим. К моменту входа водного транспортного средства в судоходное гидротехническое сооружение бортовые передающие станции (1) работают в режиме стабилизации частоты с относительной нестабильностью 10-11. Одновременно излучаемые бортовыми передающими станциями (1) четыре сигнала принимаются восемью станциями приёма сигналов (6) берегового комплекса. В тракте промежуточных частот каждого из восьми приёмных устройств формируются суммы сигналов с промежуточными частотами fif, равными (f1- fLO), (f2- fLO), (f3- fLO) и (f4- fLO), которые разделяются соответствующими полосовыми фильтрами и оцифровываются с частотой дискретизации f0 ≥ 5×fif. Выборки по N отсчётов оцифрованных сигналов передаются в вычислительный блок (4).
Отсчёты с номером выборки n сигнала k-го передатчика (k = 1, 2, 3 и 4), принятого l-м приёмником (l = 1,…, 8) в отсчётный момент времени ti, I = 1,…, N

где Akl – амплитуда сигнала,
λk = c/fk – длина волны k-го передатчика, с – скорость света,
rkl – расстояние от антенны k-го передатчика до антенны l-го приёмника,
θk – начальная фаза колебаний k-го передатчика.
Вычисляется спектр сигнала
 =FFT
=FFT ,
,
вычисляется спектр аналитического сигнала
 ,
,
вычисляется аналитический сигнал
 ,
,
вычисляется текущая фаза аналитического сигнала
 .
.
Процедура повторяется с номером выборки (n+1), вычисляется разность текущих фаз с усреднением по N отсчётам
 .
.
Приращение фазы сигнала k-го передатчика, принятого l-м приёмником, вызвано изменением расстояния между ними – Δrkl за время между регистрацией выборок с номерами n и n+1. При этом
 .
.
По результатам вычисления перемещения k-го передатчика относительно
l-го приёмника составляется система уравнений
где (xk0, yk0, zk0) – неизвестные координаты k-го передатчика,
(Δxk, Δyk, Δzk) – компоненты неизвестного вектора перемещения k-го передатчика,
(xl, yl, zl), l = 0,…, 8 – известные координаты l-го приёмника,
Δkl – измеренная длина (со знаком) проекции вектора перемещения на луч от k-го передатчика к приёмнику с номером l.
Для каждой бортовой передающей станции (1) получилась система из восьми нелинейных уравнений с шестью неизвестными (У.1), которая разрешается любым итерационным методом, например, Ньютона. В качестве начального приближения координат и скорости бортовой передающей станции (1) в случае первого (в начале процедуры позиционирования) измерения следует брать какие-то априорные либо внешние данные, например, с радара или данные ГЛОНАСС с водного транспортного средства. В связи с низкой точностью оценки начальных координат и скорости водного транспортного средства первая итерационная процедура может немного затянуться.
После разрешения системы уравнений для первого измерения в качестве начального приближения итерационной процедуры при втором и последующих измерениях используются начальные координаты цели (xk0+Δxk, yk0+Δyk, zk0+Δzk) и вектор перемещения (Δxk, Δyk, Δzk) по данным предыдущего измерения. Близость начального приближения к истинным значениям неизвестных величин сократит число требуемых итераций до одной – двух. Также после разрешения системы (У.1) при первом измерении в последующих измерениях можно подставлять в систему (У.1) вместо неизвестных переменных (xk0, yk0, zk0) известные оценки величины (xk0+Δxk, yk0+Δyk, zk0+Δzk), найденные при предыдущем измерении. После этого система (У.1) становится линейной относительно трёх неизвестных (Δxk, Δyk, Δzk). Из восьми уравнений можно оставить только три. Выбирать их следует по максимальным значениям коэффициентов (xl-xk0), (yl-yk0), (zl-zk0). После чего остаётся только решить систему трёх линейных уравнений относительно трёх неизвестных (Δxk, Δyk, Δzk). Новые координаты цели определятся как (xk0+Δxk, yk0+Δyk, zk0+Δzk).
При большом отношении сигнал/шум в приёмном устройстве погрешность оценки вектора перемещения бортовой передающей станции определяется относительной нестабильностью частоты δfk

где Fk = Vk/λk – доплеровский сдвиг частоты на длине волны λk при скорости передатчика Vk. При частоте сигнала 950-960 МГц, относительной нестабильности частоты 10-11 и скорости 1см/сек, погрешность составит ± 1,6 см. При увеличении частоты сигнала втрое, погрешность оценки перемещения уменьшится на порядок.
Полученные таким образом оценки координат центров излучения антенн бортовых передающих станций (1) используются как реперные точки цифровой 3D–модели водного транспортного средства, загружаемой в блок вычислительный (4) из блока памяти (7) совместно с 3D–моделью судоходного гидротехнического сооружения, отображаемой на блоке графического отображения навигационной информации (8) берегового комплекса системы и передаваемой по радиолинии связи через береговое терминальное оборудование радиолинии связи «борт–берег» (9) на бортовое терминальное оборудование радиолинии связи «борт–берег» (3). Текущее значение уровня воды в резервуаре судоходного гидротехнического сооружения определяется по показаниям автоматического измерителя уровня воды (5) с известными координатами места его установки с погрешностью порядка 1 см и используется в 3D–модели судоходного гидротехнического сооружения как параметр.
Полученные в дополнение к текущим координатам водного транспортного средства значения проекций вектора его скорости (вектора перемещения за время между регистрацией выборок с номерами n и n+1) позволяют прогнозировать последующие перемещения водного транспортного средства и, таким образом, прогнозировать возникновение аварийных ситуаций в судоходном гидротехническом сооружении.
Промышленная реализация предлагаемой системы возможна на основе промышленно выпускаемых средств связи, измерительных приборов и средств вычислительной техники, известных из общего уровня техники. В частности, известны: WO 2018109435 A1 – Система управления снарядом, использующая множество передатчиков и приёмников электромагнитных волн и определяющая координаты и скорость объекта управления; US 5870056 A – Пассивная система позиционирования «воздух – воздух», определяющая координаты и скорость активной цели по результатам измерения одновременно доплеровского сдвига частоты и фазовых сдвигов в интерферометре с большой базой.
Критически важными для промышленной реализации системы являются измерительные приборы, обеспечивающие точность позиционирования порядка 1 см. Это высокостабильный генератор опорных колебаний с относительной нестабильностью частоты не хуже 10-11 и измеритель уровня воды в резервуаре с абсолютной погрешностью не более 1 см. В качестве высокостабильного генератора опорных колебаний могут быть использованы стандарты частоты и времени рубидиевые Ч1-1020/2 с систематическим относительным изменением частоты выходного сигнала 10(5) МГц за 1 сутки не более ± 2×10-12, выпускаемые НПП ООО «ГНОМОН», Россия, (https://rubikom.org/catalog/rubidievyie-opornyie-generatoryi-i-standartyi-chastotyi/standart-chastotyi-i-vremeni-rubidievyij-ch1-1020-2.html). Приборы Ч1-1020/2 могут выпускаться в варианте для применения на транспортных средствах. В качестве автоматического измерителя уровня воды в резервуаре могут быть использованы погружные уровнемеры ALZ 3720 k от ООО «Пьезус», Россия, для применения на водном транспорте, с погрешностью не более 0,2% от диапазона измерений (https://piezus.ru/media/catalog/product/alz3720_kru.pdf).
Таким образом, предлагаемое изобретение позволяет повысить безопасность судоходных гидротехнических сооружений на внутренних водных путях за счёт повышения точности 3D–позиционирования водных транспортных средств в судоходных гидротехнических сооружениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
| Способ и система блокирования несанкционированного канала передачи информации от радиопередатчика земного базирования на космический аппарат | 2017 |
|
RU2666785C1 |
| Способ контроля промысла водных биологических ресурсов, мониторинговый навигационно-связной комплекс промыслового судна и центр обработки данных для осуществления способа | 2016 |
|
RU2624361C1 |
| СПОСОБ ВОДНОГО ДЕСАНТИРОВАНИЯ БРОНЕТЕХНИКИ В ЗОНУ ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ С ОБЕСПЕЧЕНИЕМ САМОСОХРАНЕНИЯ И БЕЗОПАСНОСТИ НАПЛАВУ | 2012 |
|
RU2491495C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
Изобретение относится к средствам обеспечения навигации и маневрирования водного транспорта, а также мониторинга показателей или эксплуатационных параметров судов во время работы. Технический результат – повышение безопасности судоходных гидротехнических сооружений на внутренних водных путях за счёт повышения точности 3D–позиционирования водных транспортных средств в судоходных гидротехнических сооружениях. Точность позиционирования обеспечивается как более точным определением координат судна, так и тем, что при осуществлении изобретения определяют значения проекций вектора его скорости. В системе высокоточного локального 3D–позиционирования водных транспортных средств для навигации и маневрирования на опасных участках внутренних водных путей в состав комплекса бортового оборудования входят четыре бортовые передающие станции, размещенные на носу, на корме и по правому и левому борту миделя корпуса водного транспортного средства, которые излучают радиосигналы на различных частотах и синхронизированы общим высокостабильным генератором опорных колебаний. В состав берегового оборудования входят восемь станций приёма сигналов, размещённых по правому и левому берегам русла в вершинах куба со стороной, равной ширине русла, и подключенных к блоку вычислительному, который дополнительно к текущим координатам водного транспортного средства определяет значения проекций вектора его скорости. 1 з.п. ф-лы, 2 ил.
1. Система высокоточного локального 3D–позиционирования водных транспортных средств для навигации и маневрирования на опасных участках внутренних водных путей, содержащая комплекс бортового оборудования и комплекс берегового оборудования, связанные между собой несколькими радиолиниями навигации и связи, причём комплекс бортового оборудования включает в себя бортовую передающую станцию, излучающую в окружающее пространство непрерывные немодулированные или модулированные радиосигналы сверхвысоких частот, а комплекс берегового оборудования включает в себя блок вычислительный, к которому подключены разнесённые в пространстве станции приёма сигналов и блок графического отображения навигационной информации, отличающаяся тем, что в состав комплекса бортового оборудования входят четыре бортовые передающие станции, размещенные на носу, на корме и по правому и левому борту миделя корпуса водного транспортного средства, которые излучают радиосигналы на различных частотах и синхронизированы общим высокостабильным генератором опорных колебаний, в состав комплекса бортового оборудования дополнительно включено бортовое терминальное оборудование радиолинии связи «борт–берег», в состав комплекса берегового оборудования входят восемь станций приема сигналов, размещенных по правому и левому берегам русла в вершинах куба со стороной, равной ширине русла, и подключенных к блоку вычислительному, который дополнительно к текущим координатам водного транспортного средства определяет значения проекций вектора его скорости, дополнительно подключены: автоматический измеритель уровня воды в судоходном гидротехническом сооружении, блок памяти, содержащий актуальную базу данных цифровых 3D–моделей водного транспортного средства и рельефа дна судоходного гидротехнического сооружения, а также береговое терминальное оборудование радиолинии связи «борт–берег», соединённое по радиолинии с бортовым терминальным оборудованием радиолинии связи «борт–берег».
2. Система по п. 1, отличающаяся тем, что приёмные станции в составе комплекса берегового оборудования выполнены по супергетеродинной схеме с общим гетеродином, синхронизированным высокостабильным генератором опорных колебаний.
| US 5696514 A1, 09.12.1997 | |||
| Способ управления движущимся судном | 2015 |
|
RU2615848C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| УСТРОЙСТВО ДЛЯ ВЫРАБОТКИ И ИНДИКАЦИИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДНА ПО УЗКИМ УЧАСТКАМ ФАРВАТЕРОВ | 2006 |
|
RU2318187C1 |
| US 5916284 A1, 29.06.1999. | |||

