Изобретение относится к области ручного управления подвижными объектами, в частности управления движением судов различного водоизмещения и назначения по узким участкам фарватеров. Например, устройство может быть использовано для навигации судов при прохождении между опорами мостов.
Известно устройство (US 5916284, 1999), имеющее в своем составе: измерители скорости судна, скорости поворота корпуса судна в горизонтальной плоскости, курса судна (компас), скорости и направления ветра, а также клавиатуру, центральное процессорное устройство, устройство управления дисплеем, память для запоминания координат, устройство для вывода графической информации и дисплей. Известное устройство предназначено для отображения на дисплее предшествующей траектории судна, текущего положения судна и прогнозируемой траектории движения судна. На дисплей выводится серия изображений проекций корпуса судна на водную поверхность соответствующих дискретным моментам предшествующей траектории судна, текущего положения судна и прогнозируемой траектории, а также береговая линия и граница причала. Устройство предназначено для помощи в осуществлении маневрирования судном, в частности при выполнении швартовки и отходе судна от пристани.
Недостаток этого устройства при использовании его судоводителем при прохождении узких участков фарватера заключается в том, что с помощью процессорного устройства определяют проекции текущего и прогнозируемого положения корпуса судна на водную поверхность. Эта информация выводится на дисплей, т.е. на дисплее представлен вид сверху. Размеры траекторий маневров судов составляют десятки и сотни метров (для крупных судов). Однако судоводитель с ходового мостика, находящегося на высоте нескольких метров или нескольких десятков метров (для крупных судов) над поверхностью воды, видит начало узкого участка фарватера под малым углом к горизонту. Отличие того, что видит судоводитель с ходового мостика, от изображения на дисплее устройства, затрудняет принятие оперативных решений по управлению движением судна при выходе на траекторию проводки судна по узкому участку фарватера. Кроме того, при действии на судно возмущающих факторов направление вектора продольной скорости судна может не совпадать с направлением продольной оси корпуса судна, т.е. угол дрейфа может быть не равен нулю. Когда угол дрейфа не равен нулю, судоводителю трудно точно оценить величину отклонения направления вектора продольной скорости судна от направления заданной траектории по изображениям проекций корпуса судна на водную поверхность. Это может привести к запаздыванию реакции судоводителя по парированию опасного отклонения направления вектора продольной скорости судна от заданного направления.
Технический результат, достигаемый при реализации изобретения, заключается в повышении точности ручной проводки судов по узким участкам фарватеров и снижении влияния человеческого фактора на эту операцию в различных метеоусловиях, включая сложные.
Указанный технический результат достигается тем, что устройство для выработки и индикации информации для проводки судна по узким участкам фарватеров содержит измеритель вектора продольной скорости судна, измеритель координат судна, измеритель курса судна, измеритель скорости поворота корпуса судна в горизонтальной плоскости и внешнюю энергонезависимую память, выходами соединенные с входом микроконтроллера, и графический экран, соединенный с выходом микроконтроллера, при этом микроконтроллер выполнен с возможностью вычисления расстояния от носа судна до начала узкого участка фарватера, величины скорости сближения судна с начальной границей узкого участка фарватера, координат проекции прогнозируемого положения центра масс судна, границ проекции текущего положения корпуса судна и границ проекции прогнозируемого положения корпуса судна на ось oX прямоугольной системы координат в горизонтальной плоскости, где положительный луч oY совпадает с заданной траекторией движения судна в узком участке фарватера, ось oX - начальная граница узкого участка фарватера, о - начало узкого участка фарватера.
Вычисление расстояния от носа судна до начала узкого участка фарватера L, величины скорости сближения судна с началом узкого участка фарватера Vсб, координат xцмп, xсл, xсп, xслп, xспп проекции прогнозируемого положения центра масс судна, границ проекции текущего положения корпуса судна и границ проекции прогнозируемого положения корпуса судна на ось оХ прямоугольной системы координат в горизонтальной плоскости выполняют в соответствии с выражениями:
L=Sqrt((xцм+lн·cos(φк-φз))2+(yцм+lн·sin(φк-φз))2),
Vсб=|Vс|·cos(φcv-φз)
при (φк-φз)>0 xсл=xdк-d/2, xсп=xdн+d/2,
при (φк-φз)≤0 xсл=xdн-d/2, xсп=xdк+d/2,
xцмп=xцм·|Vc|·sin(φcv-φз)·τ,
при (φк-φз+ω·τ)>0 xслп=хdкп-d/2, xспп=хdнп+d/2,
при (φк-φз+ω·τ)≤0 xслп=хdнп-d/2, xспп=xdкп+d/2,
где L - расстояние от носа судна до начала узкого участка фарватера,
Sqrt - операция извлечения квадратного корня,
xцм, yцм - координаты текущего положения центра масс судна,
lн, lк - расстояния соответственно от носа и кормы до центра масс судна,
φк - курсовой угол судна,
φз - угол между направлением на север и заданной траектории движения в узком участке фарватера,
xdк, хdн - проекции на ось оХ точек на продольной оси судна, находящегося в текущем положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины корпуса d/2 судна, причем хdк=xцм-(lк-d/2)·sin(φк-φз), а xdн=xцм+(lн-d/2)·sin(φк-φз),
d - ширина корпуса судна,
xцмп - проекция на ось оХ прогнозируемого положения центра масс судна,
|Vc| - абсолютная величина продольной скорости судна,
φcv - угол между направлением на север и направлением продольной скорости судна,
τ - период цикла вычисления микроконтроллером текущих значений параметров движения судна,
xdкп, хdнп - проекции на ось оХ точек на продольной оси судна, находящегося в прогнозируемом положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины d/2 корпуса судна, причем хdкп=xцмп-(lк-d/2)·sin(φк-φз+ω·τ),
xdнп=xцмп+(lн-d/2)·sin(φк-φз+ω·τ),
ω - угловая скорость поворота корпуса судна в горизонтальной плоскости.
Сущность заявленного изобретения поясняется чертежами.
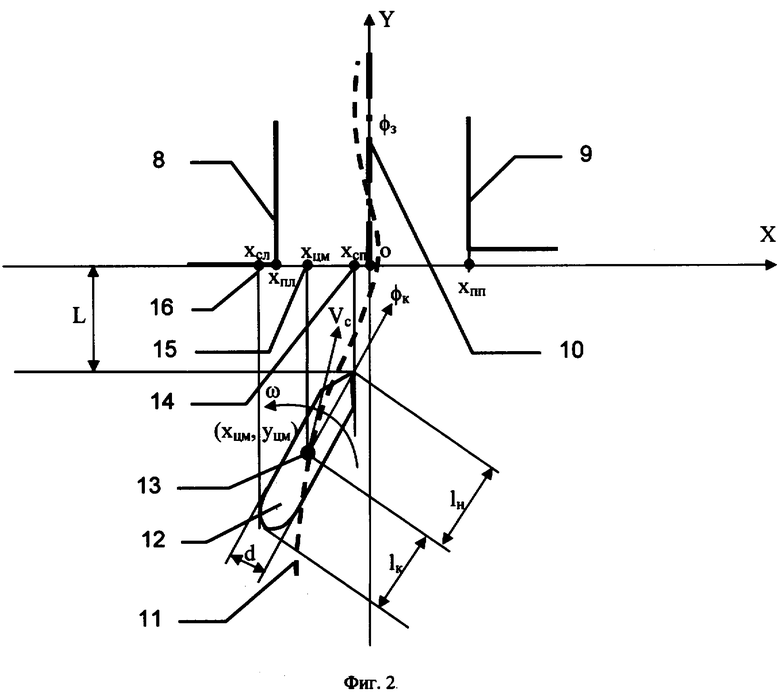
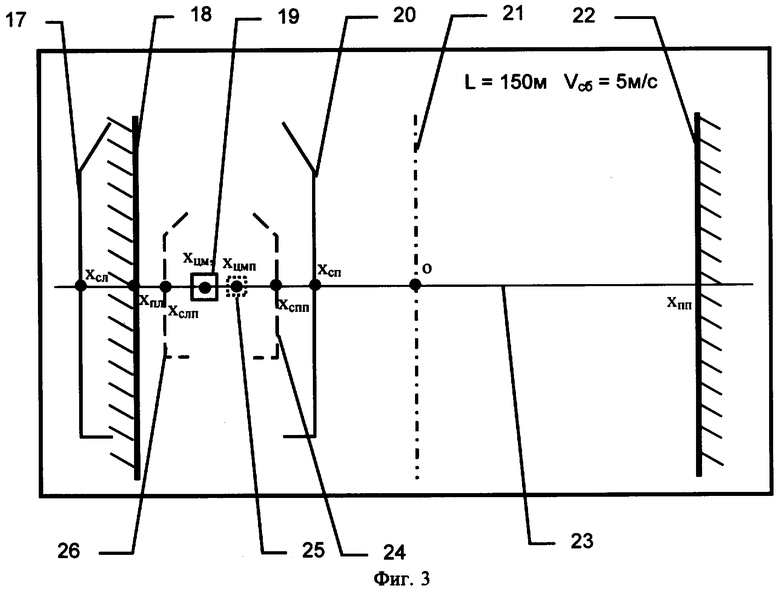
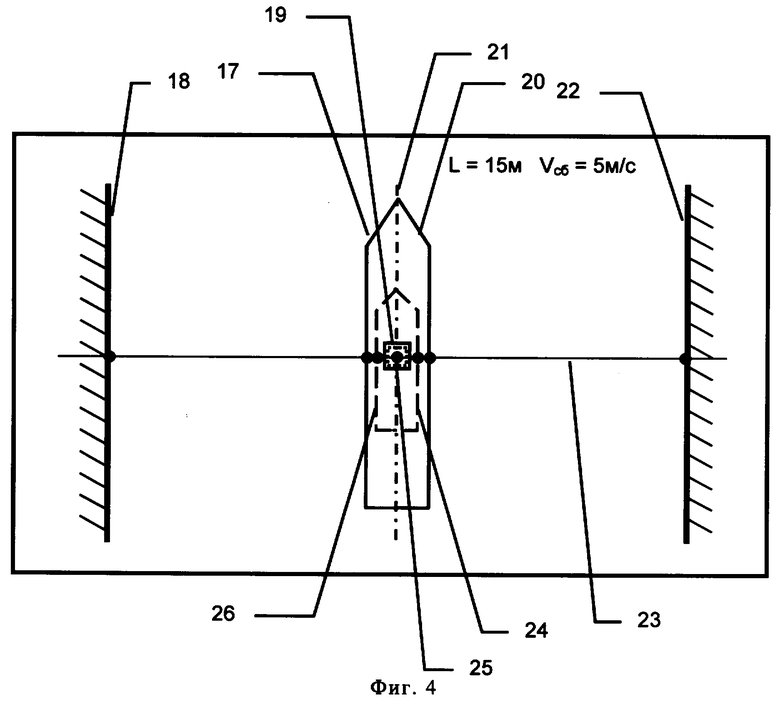
На фиг.1 изображена функциональная схема устройства для выработки и индикации информации для проводки судна по узким участкам фарватеров, на фиг.2 изображена схема проводки судна по участку маневрирования перед узким участком фарватера и при прохождении узкого участка фарватера, на фиг.3 дано примерное представление на графическом экране информации о состоянии процесса проводки судна, на фиг.4 дано примерное представление на графическом экране информации об идеальном состоянии процесса проводки судна.
Устройство для выработки и индикации информации для проводки судна по узким участкам фарватеров содержит микроконтроллер 1, входы которого соединены с выходами измерителя вектора продольной скорости судна 2, измерителя координат судна 3, внешней энергонезависимой памяти 4, измерителя курса 6, измерителя скорости поворота корпуса судна в горизонтальной плоскости 7, а выход микроконтроллера соединен с входом графического экрана 5.
В соответствии с фиг.2 система прямоугольных координат XoY в горизонтальной плоскости связана с узким участком фарватера, при этом положительный луч oY совпадает с заданной траекторией движения судна в узком участке фарватера, ось оХ - начальная граница узкого участка фарватера, о - начало узкого участка фарватера, 8 и 9 - левая и правая границы узкого участка фарватера соответственно, 10 - заданная траектория движения в узком участке фарватера, φк - курсовой угол судна, φз - угол между направлением на север и заданной траекторией движения в узком участке фарватера, 11 - фактическая траектория движения судна, 12 - судно, 13 - текущее положение центра масс судна с координатами xцм, yцм, 14 и 16 - координаты xсп, xсл правой и левой границ проекции на ось оХ текущего положения корпуса судна соответственно, 15 - координата проекции текущего положения центра масс судна xцм на ось оХ, d - ширина корпуса судна, lн, lк - расстояния от носа и кормы до центра масс судна, L - расстояние от носа судна до начала узкого участка фарватера.
На экране (фиг.3) показаны условные изображения левой и правой границ проекции на ось оХ текущего положения корпуса судна 17, 20, условные изображения проекций на ось оХ левой и правой границ узкого участка фарватера 18, 22, условное изображение проекции на ось оХ текущего положения центра масс судна 19, условное изображение проекции на ось оХ заданной траектории движения судна 21, условное изображение оси оХ с делениями шкалы для точной оценки отклонения судна от заданной траектории 23, условные изображения границ проекции на ось оХ прогнозируемого положения корпуса судна 24, 26, условное изображение проекций на ось оХ прогнозируемого положения центра масс судна 25. На экране отображается также значение L - расстояние от носа судна до начала узкого участка фарватера и Vсб - скорость сближения судна с начальной границей узкого участка фарватера.
Внешняя энергонезависимая память 4 предназначена для хранения:
1) Набора Dc геометрических параметров судна Dc={d, lн, lк}, где d - ширина корпуса судна, lн, lк - расстояния от носа и кормы до центра масс судна.
2) Наборов Sпр j географических координат границ узких участков фарватера Sпр j={φпл, λпл, φпп, λпп}j, где φпл, λпл - широта и долгота левой границы, φпп, λпп - широта и долгота правой границы, j - номер узкого участка фарватера, лежащий в диапазоне от 1 до М, где М - количество узких участков фарватера на маршруте.
3) Наборов Тз j параметров заданных прямолинейных траекторий движения в узких участках фарватера Tз j={φ0з, λ0з, φз, lз}j и протяженности участков маневрирования Lj, где φ0э, λ0з, - широта и долгота начальной точки, lз - длина j-ой заданной траектории, Lj - длина участка фарватера перед узким участком фарватера Sпр j, достаточная для вывода судна на заданную траекторию Тз j.
Микроконтроллер 1 предназначен для:
1) Приема от измерителей 2, 3, 6 и 7 соответственно значений вектора продольной скорости судна Vc={|Vc|, φcv}, где |Vc| - абсолютная величина продольной скорости судна и φcv - угол между направлением на север и направлением продольной скорости судна, географических координат судна (φc, λc), курсового угла φк, угловой скорости поворота корпуса судна в горизонтальной плоскости ω; вычисления с периодом τ текущего расстояния L от носа судна до начала узкого участка фарватера, скорости сближения судна Vсб с началом узкого участка фарватера, пересчета географических координат судна (φс, λс) в координаты (xцм, yцм) центра масс судна в системе координат XoY, пересчета географических координат φпл, λпл, φпп, λпп соответственно левой и правой границ узких участков фарватера в координаты xпл, xпп соответственно левой и правой границ проекции узких участков фарватера на ось оХ, вычисления наборов Xс, Xсп координат проекций на ось оХ текущего и прогнозируемого положения корпуса судна Хс={xцм, xсл, xсп} и Хсп={xцмп, xслп, xспп}, где xцм - координата проекций на ось оХ текущего положения центра масс судна, xсл, xсп - координаты левой и правой границ проекции на ось оХ текущего положения корпуса судна, xцмп - координаты проекции на ось оХ прогнозируемого положений центра масс судна, xслп, xспп - координаты левой и правой границ проекции на ось оХ прогнозируемого положения корпуса судна.
2) Вывода на графический экран 5 изображения горизонтальной оси оХ 23, вывода на эту ось с соблюдением масштаба координат xпл, xпп проекций на ось оХ левой и правой границ узкого участка фарватера, координат xцм и xцмп проекций на ось оХ текущего и прогнозируемого положений центра масс судна и координат xсл, xсп и xслп, xспп левой и правой границ проекций на ось оХ текущего и прогнозируемого положений корпуса судна.
Графический экран 5 предназначен для отображения:
1) В алфавитно-цифровой форме: текущего расстояния от носа судна до начала узкого участка фарватера L, скорости сближения с началом узкого участка фарватера Vсб.
2) В графической форме: изображения горизонтальной оси оХ 23 с делениями, вывода на эту ось с соблюдением масштаба координат xпл, xпп проекций границ узкого участка фарватера, координат xцм и xцмп проекций на ось оХ текущего и прогнозируемого положений центра масс судна и координат xсл, xсп и xслп, xспп левой и правой границ проекций текущего и прогнозируемого положений корпуса судна.
3) В графической форме: условных изображений границ узкого участка фарватера 18, 22, заданной траектории движения 21, проекции текущего и прогнозируемого положений центра масс судна 19, 25, левой 17, 26 и правой 20, 24 границ проекций текущего и прогнозируемого положений корпуса судна.
Для того, чтобы обеспечить удобство использования судоводителем информации, показанной на графическом экране 5, указанные точки на изображении горизонтальной оси оХ 23 сопровождаются условными изображениями границ узкого участка фарватера 18, 22, заданной траектории движения 21, проекции текущего и прогнозируемого положений центра масс судна 19, 25, левой 17, 26 и правой 20, 24 границ проекций текущего и прогнозируемого положений корпуса судна.
Устройство работает следующим образом.
Предварительно до начала движения по маршруту во внешнюю энергонезависимую память устройства заносятся геометрические данные о судне, для каждого узкого участка фарватера заносятся данные о границах участка, о длине участка маневрирования, достаточного для вывода судна на заданную траекторию прохождения этого участка, и о заданной прямолинейной траектории прохождения этого участка.
На всем протяжении маршрута при движении судна устройство работает в одном из трех режимов: А) состояние сближения с очередным узким участком фарватера, Б) состояние выхода на заданную траекторию прохождения узкого участка фарватера и В) состояние движения по заданной траектории на участке фарватера. После выхода на заданную траекторию и подходу к началу узкого участка фарватера устройство переходит в состояние В. После проводки судна судоводителем по узкому участку фарватера устройство переходит в состояние А сближения с очередным узким участком фарватера.
В течение всего времени работы устройства измеритель 2 выполняет измерение вектора скорости продольного движения судна Vc, измеритель 3 выполняет измерение географических координат судна (φс, λс), измеритель 6 выполняет измерение курса судна φк, измеритель 7 выполняет измерение скорости поворота корпуса судна в горизонтальной плоскости ω. Микроконтроллер 1 принимает данные от измерителей 2, 3, 6 и 7 с периодом τ. Пусть устройство работает в состоянии А сближения с очередным j-ым узким участком фарватера. На основании данных, полученных от измерителей 2, 3, 6 и 7, информации о местоположении очередного j-ого узкого участка фарватера Sпр j и длины участка маневрирования Lj, хранящихся во внешней энергонезависимой памяти 4, в микроконтроллер 1 вычисляет расстояние L до начала очередного j-ого узкого участка фарватера и проверяет условие вхождения судна в участок маневрирования L<Lj. Если условие вхождения судна в участок маневрирования перед j-ым узким участком фарватера выполнено, то устройство переходит в состояние проводки, и микроконтроллер 1 начинает дополнительно вычислять текущие значения скорости сближения с началом j-ого узкого участка фарватера Vсб, координаты xпл, xпп границ проекции j-ого узкого участка фарватера, координаты xцм проекции на ось оХ текущего положения центра масс судна, координаты xсл, xсп границ проекции на ось оХ текущего положения корпуса судна, координаты xцмп проекции на ось оХ прогнозируемого положения центра масс судна и координаты xслп, xспп проекции на ось оХ границ прогнозируемого положения корпуса судна (см. фиг.2).
Для вычисления расстояния L от носа судна до начала узкого участка фарватера можно использовать выражение (1)
L=Sqrt((xцм+lн·cos(φк-φз))2+(yцм+lн·sin(φк-φз))2), (1)
где L - расстояние от носа судна до начала узкого участка фарватера, т.е. расстояние от носа судна до начала координат системы XoY,
Sqrt - операция извлечения квадратного корня,
xцм, yцм - координаты центра масс судна,
lн - расстояние носа от центра масс судна,
φз - угол между направлением на север и заданной траектории движения в узком участке фарватера,
φк - курсовой угол судна.
Для вычисления величины скорости сближения судна с началом узкого участка фарватера Vсб можно использовать выражение (2),
Vсб=|Vс|·cos(φcv-φз), (2)
где Vсб - величина скорости сближения судна с началом узкого участка фарватера, т.е. проекция на ось oY вектора скорости продольного движения судна,
|Vc| - абсолютная величина продольной скорости судна,
φк - угол между направлением на север и заданной траекторией движения в узком участке фарватера,
φк - курсовой угол судна.
Для приближенного вычисления координат xсл, xсп границ проекции на ось оХ текущего положения корпуса судна можно использовать выражения (3), (4), (7) и (8).
При (φк-φз)>0 координаты xсл и xсп границ проекции на ось оХ текущего положения корпуса судна могут быть найдены с помощью выражений (3), (4)
хсл=хdк-d/2, (3)
хсп=хdн+d/2 (4)
где xdк, хdн - проекции на ось оХ точек на продольной оси судна, находящегося в текущем положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины корпуса d/2 судна.
Проекции хdк, xdн вычисляются по следующим формулам (5), (6):
хdк=хцм-(lк-d/2)·sin(φк-φз), (5)
хdн=хцм+(lн-d/2)·sin(φк-φз), (6)
xцм - проекция на ось оХ текущего положения центра масс судна,
lн, lк - расстояния соответственно носа и кормы от центра масс судна,
d - ширина корпуса судна,
φк - курсовой угол судна,
φз - угол между направлением на север и заданной траектории движения в узком участке фарватера.
При (φк-φз)≤0 координаты xсл и xсп границ проекции на ось оХ текущего положения корпуса судна могут быть найдены с помощью выражений (7) и (8)
хсл=хdн-d/2, (7)
хсп=хdн+d/2, (8)
где xdк, xdн - проекции на ось оХ точек на продольной оси судна, находящегося в текущем положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины корпуса d/2 судна, проекции xdк, xdн вычисляются по формулам (5) и (6).
Для вычисления проекции на ось оХ прогнозируемого положения центра масс судна xцмп можно использовать выражение (9)
хцмп=хцм·|Vc|·sin(φcv-φз)·τ, (9)
где xцмп - координата проекции на ось оХ прогнозируемого положения центра масс судна,
xцм - координата проекции на ось оХ текущего положения центра масс судна,
|Vc| - абсолютная величина продольной скорости судна,
φcv - угол между направлением на север и направлением продольной скорости судна,
φз - угол между направлением на север и заданной траектории движения в узком участке фарватера,
τ - период цикла вычисления микроконтроллером текущих значений параметров движения судна.
Для приближенного вычисления координат xслп, xспп границ проекции на ось оХ прогнозируемого положения корпуса судна можно использовать выражения (10), (11), (14) и (15).
При (φк-φз+ω·τ)>0 координаты xслп и xспп границ проекции на ось оХ прогнозируемого положения корпуса судна могут быть найдены с помощью выражений (10) и (11)
хслп=хdкп-d/2, (10)
хспп=хdнп+d/2, (11)
где xслп и xспп - координаты границ проекции на ось оХ прогнозируемого положения корпуса судна,
хdкп, хdнп - проекции на ось оХ точек на продольной оси судна, находящегося в прогнозируемом положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины d/2 корпуса судна, проекции хdкп, хdнп вычисляются по следующим формулам (12) и (13):
хdкп=хцмп-(lк-d/2)·sin(φк-φз+ω·τ), (12)
хdнп=хцмп+(lн-d/2)·sin(φк-φз+ω·τ), (13)
xцмп - координата Проекции на ось оХ прогнозируемого положения центра масс судна,
lн, lк - расстояния соответственно носа и кормы от центра масс судна,
d - ширина корпуса судна,
φк - курсовой угол судна,
φз - угол между направлением на север и заданной траектории движения в узком участке фарватера,
ω - угловая скорость поворота корпуса судна в горизонтальной плоскости,
τ - период цикла вычисления микроконтроллером текущих значений параметров движения судна.
При (φк-φз+ω·τ)≤0 координаты xслп и xспп границ проекции на ось оХ прогнозируемого положения корпуса судна могут быть найдены с помощью выражений (14) и (15)
хслп=хdкп-d/2, (14)
хспп=хdнп+d/2, (15)
где xслп и xспп координаты границ проекции на ось оХ прогнозируемого положения корпуса судна.
xdкп, xdнп - проекции на ось оХ точек на продольной оси судна, находящегося в прогнозируемом положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины d/2 корпуса судна.
Проекции хdкп, xdнп вычисляются по формулам (12) и (13).
На фиг.3. условное изображение заданной траектории движения выполнено в виде штрихпунктирной линии 21. Условные изображения проекций границ узкого участка фарватера xпл, xпп выполнены в виде жирных линий со штриховкой 18, 22. Условное изображение проекции на ось оХ текущего положения центра масс судна xцм выполнено в виде маленького квадрата 19. Условные изображения границ проекций на ось оХ 23 текущего положения корпуса судна xсл, xсп выполнены в виде изображений левой 17 и правой 20 половинок корпуса судна в плане. При угле дрейфа равном нулю (φcv-φк=0) изображения 17 и 20 половинок корпуса складываются в целое изображение корпуса судна в плане. Условное изображение проекции на ось оХ прогнозируемого положения центра масс судна xцмп выполнено в виде маленького пунктирного квадрата 25. Условные изображения проекции на ось оХ 23 границ прогнозируемого положения корпуса судна xслп, xспп выполнены в виде пунктирного изображений левой 26 и правой 24 половинок корпуса судна в плане.
При идеальном текущем состоянии проводки судна по узкому участку фарватера (см. фиг.4), когда центр масс судна лежит на заданной прямолинейной траектории движения в узком участке фарватера, тогда условное изображение 19 проекции на ось оХ 23 центра масс судна xцм лежит на изображении заданной траекторией движения 21; когда вектор текущей скорости продольного движения судна Vc совпадает с заданным направлением прямолинейной траектории движения судна в узком участке фарватера, тогда условное изображение 19 проекции на ось оХ 23 текущего положения центра масс судна xцм совпадает с условным изображением 25 проекции на ось оХ 23 прогнозируемого положения центра масс судна xцмп; когда угловая скорость поворота корпуса судна в горизонтальной плоскости со равна нулю и угол дрейфа равен нулю (φcv-φк=0), тогда условные изображения 17, 20, 26, 24 границ xсл, xсп, xслп, xспп проекций на ось оХ 23 текущего и прогнозируемого положений корпуса судна складываются в целые изображения корпуса судна в плане.
Задача судоводителя при выводе судна на заданную прямолинейную траекторию проводки судна по узкому участку фарватера состоит в том, чтобы с помощью органов управления рулем и тягой движителей судна на графическом экране 5 совместить и удерживать вместе условное изображение заданной траекторией движения 21, условное изображение 19 проекции на ось оХ 23 текущего положения центр масс судна xцм, условное изображение 25 прогнозируемой проекции на ось оХ 23 прогнозируемого положения центра масс судна xцмп.
При выполнении расчетов координат проекций на ось оХ предполагаем, что вектор продольной скорости судна Vc, курс судна φк, угловая скорость поворота корпуса судна в горизонтальной плоскости ω постоянны на отрезке времени τ.
При проводке судна между препятствиями (например, опорами моста) судоводитель может использовать не только глазомерные оценки положения судна относительно препятствия, но и объективные оценки текущего и прогнозируемого взаимного положения судна и препятствия. Дополнительные объективные данные обеспечат повышение точности проводки судна в районе препятствия и, соответственно, к снижению аварийности. В частности, использование устройства позволит судоводителю заранее выйти на заданную траекторию прохода между препятствиями. Управление судоводителем движением судна по данным, выводимым на экран графического индикатора, позволит выполнять точную проводку судна по узким участкам фарватера, в частности между опорами мостов в ночное время, и при неблагоприятных погодных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| СПОСОБ ИНДИКАЦИИ УГРОЗ И КОМАНД ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2008 |
|
RU2373116C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СУДНА И ХАРАКТЕРИСТИК ЕГО ДВИЖЕНИЯ | 2013 |
|
RU2546846C2 |
| УСТРОЙСТВО ДЛЯ ПРОВОДКИ СУДНА ПО УЗКИМ УЧАСТКАМ ФАРВАТЕРОВ | 2008 |
|
RU2382987C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОНОМНОЙ ВЫРАБОТКИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДОВ В УЗКИХ ФАРВАТЕРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2097784C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ В ОГРАНИЧЕННЫХ ВОДАХ БЕЗ ИЗМЕНЕНИЯ ЛИНИИ ДВИЖЕНИЯ | 2005 |
|
RU2309082C2 |
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
Изобретение относится к области ручного управления подвижными объектами, в частности управления движением судов различного водоизмещения и назначения по узким участкам фарватеров. Например, устройство может быть использовано для навигации судов при прохождении между опорами мостов. Устройство для выработки и индикации информации для проводки судна по узким участкам фарватеров содержит измеритель вектора продольной скорости судна, измеритель координат судна, измеритель курса судна, измеритель скорости поворота корпуса судна в горизонтальной плоскости и внешнюю энергонезависимую память, выходами соединенные с входом микроконтроллера, и графический экран, соединенный с выходом микроконтроллера, при этом микроконтроллер выполнен с возможностью вычисления расстояния от носа судна до начала узкого участка фарватера, величины скорости сближения судна с начальной границей узкого участка фарватера, координат проекции прогнозируемого положения центра масс судна, границ проекции текущего положения корпуса судна и границ проекции прогнозируемого положения корпуса судна на ось оХ прямоугольной системы координат в горизонтальной плоскости, где положительный луч oY совпадает с заданной траекторией движения судна в узком участке фарватера, ось оХ - начальная граница узкого участка фарватера, о - начало узкого участка фарватера. Технический результат: повышение точности ручной проводки судов по узким участкам фарватеров и снижение влияния человеческого фактора на эту операцию в различных метеоусловиях, включая сложные. 1 з.п. ф-лы, 4 ил.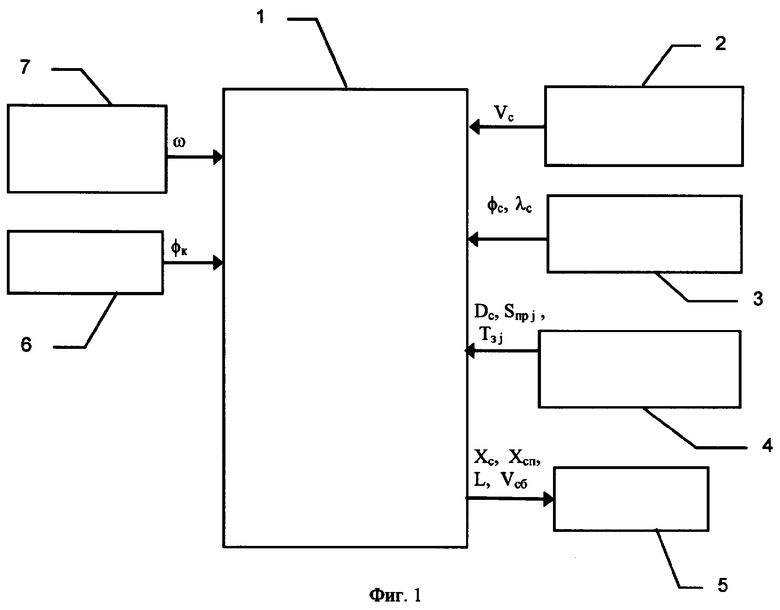
L=Sqrt((xцм+lн·cos(φк-φз))2+(yцм+lн·sin(φк-φз))2),
Vсб=|Vс|·cos(φcv-φз),
при (φк-φз)>0 xсл=xdк-d/2, xсп=xdн+d/2,
при (φк-φз)≤0 xсл=xdн-d/2, xсп=xdк+d/2,
xцмп=xцм·|Vc|·sin(φcv-φз)·τ,
при (φк-φз+ω·τ)>0 xслп=хdкп-d/2, xспп=хdнп+d/2,
при (φк-φз+ω·τ)≤0 xслп=хdнп-d/2, xспп=xdкп+d/2,
где L - расстояние от носа судна до начала узкого участка фарватера;
Sqrt - операция извлечения квадратного корня;
Хцм, Уцм - координаты текущего положения центра масс судна;
lн, lк - расстояния соответственно от носа и кормы до центра масс судна;
φк - курсовой угол судна;
φз - угол между направлением на север и заданной траекторией движения в узком участке фарватера;
xdк, хdн - проекции на ось оХ точек на продольной оси судна, находящегося в текущем положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины корпуса d/2 судна,
причем хdк=хцм-(lк-d/2)·sin(φк-φз), а xdн=хцм+(lн-d/2)·sin(φк-φз),
d - ширина корпуса судна;
xцмп - проекция на ось оХ прогнозируемого положения центра масс судна;
|Vc| - абсолютная величина продольной скорости судна;
φcv - угол между направлением на север и направлением продольной скорости судна;
τ - период цикла вычисления микроконтроллером текущих значений параметров движения судна;
xdкп, xdнп - проекции на ось оХ точек на продольной оси судна, находящегося в прогнозируемом положении, и удаленных соответственно от кормы и носа судна на расстояние полуширины d/2 корпуса судна,
причем хdКп=хцмп-(lк-d/2)·sin(φк-φз+ω·τ),
хdКп=хцмп-(lн-d/2)·sin(φк-φз+ω·τ),
ω - угловая скорость поворота корпуса судна в горизонтальной плоскости.
| US 5916284 А, 29.06.1999 | |||
| JP 3279867 А, 11.12.1991 | |||
| JP 55146006 А, 14.11.1980 | |||
| СПОСОБ АВТОНОМНОЙ ВЫРАБОТКИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДОВ В УЗКИХ ФАРВАТЕРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2097784C1 |
| RU 2052838 C1, 20.01.1996. | |||

