Изобретение относится к управлению движением судна в стесненных условиях при ограниченной видимости, но может быть использовано в средствах автоматического управления движением судна, а также в системах динамического позиционирования судна.
Автоматизация судовождения помогает снизить рабочую нагрузку на судоводителя в условиях портовых операций, проводки судна в морских, подходных каналах, а также в других сложных навигационных условиях. Судоводителю необходимо получение точного положения судна, параметров его движения, включая информацию об угловой скорости вращения, а также состояния окружающей среды. В такой ситуации существенную помощь в решении задач проводки и швартовки крупнотоннажного судна могут оказать автоматизированные системы высокоточной проводки и швартовки судов, которые обеспечивают приемлемую точность контроля за движением судна, независимую позиционную точность, избегая сложности техники, веса и ее размеров.
Известен способ определения навигационных элементов (Морская библиотека: Спутниковые навигационные системы) http://sea-library.ru/gmdss/74-sputnikovye-navigatsionnye-sistemy.html (распечатка прилагается) движения судна созвездием из трех спутников. Однако спутниковые навигационные системы GPS и ГЛОНАСС не позволяют обеспечить точность определения координат, необходимую для безопасной навигации судов на подходах к портам и при швартовых операциях. Это связано с различными факторами, такими как неоднородность ионосферных и тропосферных слоев, ошибки синхронизации, наличие отраженных сигналов, солнечной активностью, неточностью расчета положения спутника в пространстве.
Для устранения этих ошибок применяется дифференциальный режим GPS/ГЛОНАСС с использованием береговой локальной контрольно-корректирующей станции, координаты которой известны точно. Есть два варианта режима - в первом, называемом дифференциалом положений, вычисляется поправка, равная разности между действительными координатами станции и измеренными со спутников, которая передается на суда в данном районе. Во втором варианте, называемом дифференциалом псевдодальностей, на станции определяется разница между измеренными псевдорасстояниями до спутников и рассчитанными по эферимидам. Эти поправки передаются на все заинтересованные суда. Этим достигается значительное увеличение точности определения координат, до нескольких десятков сантиметров.
Известен способ определения ориентации объектов в пространстве, дальности, пеленга, координат местоположения и составляющих вектора скорости по навигационным радиосигналам космических аппаратов спутниковых радионавигационных систем по патенту РФ №2152625 (МПК7 G01S 5/02), согласно которому увеличение точности измерений достигается за счет измерения приращений дальностей, которые полагаются эквивалентными измерениям линейными интерферометрами, расположенными на орбитах навигационных искусственных спутников Земли (НИСЗ), базами которых являются мерные интервалы, определяемые метками времени шкал времени НИСЗ и передаваемые в составе навигационных сообщений спутниковых навигационных радиосигналов. Все навигационные расчеты проводятся в векторном поле. Особенностью данного способа является наличие пяти приемных антенн спутниковых навигационных радиосигналов, расположенных на плечах двухбазового интерферометра со взаимно ортогональными базами и посередине, на перекрестии баз.
Недостатком данного способа является необходимость загрузки в память навигационных искусственных спутников Земли значений модулей и значений направляющих косинусов направленных отрезков, соединяющих положения НИСЗ на орбите, соответствующие определенным мерным интервалам.
Известно изобретение по патенту РФ №2462690 (МПК G01C 21/00) «Интегрированная инерциально-спутниковая система ориентации и навигации», в котором повышение точности определения навигационных элементов достигается использованием бескарданных инерциально измерительных модулей (БИИМ) включающих измерительные блоки на гироскопах и акселерометрах низкой точности. Указанная система также использует приемную аппаратуру спутниковой навигационной системы, включающую два или несколько приемника ГЛОНАСС/GPS с разнесенными на соответствующих базах антеннами, при этом измерительный блок БИИМ и опорная антенна приемной аппаратуры СНС устанавливаются на максимально возможном расстоянии от центра масс объекта, ограниченном размерами объекта. В условиях судна - на линии параллельной продольной оси симметрии судна, либо на самой оси.
Математическое обеспечение интегрированной системы ориентации и навигации включало задачу фильтрации по совместной обработке с использованием алгоритмов обобщенного фильтра Калмана данных БИИМ и приемной аппаратуры спутниковой навигационной системы, содержащую:
- формирование разностных измерений на уровне расчетных и измеренных значений вторых разностей фазовых измерений для каждой пары навигационных спутников и их линеаризацию относительно текущих расчетных значений;
- вычисление оценок погрешностей БИИМ в выработке параметров ориентации объекта и их коррекцию в обратной связи на каждом шаге решения задачи фильтрации;
- алгоритмы контроля погрешностей интегрированной системы ориентации и навигации в выработке кинематических параметров движения объекта, включающие запись их текущих значений в file.mat и построение графиков погрешностей.
Недостатком устройства, по реализованному в нем способу, является недостаточная точность определения вектора положения судна при проходе по узкостям.
Дальнейшим развитием данного способа является использование вспомогательных навигационных средств по патенту РФ №2573119 (МПК G01C 21/00) Способ и система для выработки параметров угловой ориентации корпуса судна, который взят за прототип.
Согласно способу текущие параметры угловой ориентации корпуса судна вычисляют с использованием интегрирования интегрирующим устройством суммы сигналов приемников спутниковых навигационных сигналов и сигналов гироскопических датчиков угловых скоростей, с учетом инвертированных масштабированных сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени. Используются две опорные точки с антеннами ГНСС и гироскопами.
Система по данному способу работает следующим образом. Выходные сигналы приемника спутниковых навигационных сигналов суммируются с выходными сигналами датчиков угловых скоростей, затем поступают на сумматор, где они суммируются с сигналами, содержащими информацию об угловой ориентации в предыдущий момент времени. Ввиду того, что для однозначного определения положения объекта в инерциальном пространстве требуется три параметра (углы курса, крена и дифферента), то в предпочтительном варианте реализации предлагаемой системы имеется три измерительных канала. После суммирования на выходе сумматора образуется сигнал, представляющий собой функцию времени первого порядка. Этот сигнал подается на вход интегрирующего устройства, где происходит его интегрирование. Сигнал на выходе интегрирующего устройства несет информацию о текущих параметрах угловой ориентации судна (углах курса, крена и дифферента, размерность градусы). В результате на выходе интегрирующего устройства вырабатывается сигнал, несущий информацию о текущих параметрах угловой ориентации корпуса судна.
Недостатком данного способа является ограниченный набор определяемых навигационных элементов, что недостаточно для проводки судна по сложному фарватеру в порту и швартовке.
Целью предлагаемого изобретения является обеспечение надежной проводки и швартовки судна в стесненных условиях, а также при ограниченной видимости.
Для достижения указанной цели предлагается способ высокоточного определения навигационных элементов движения судна с использованием спутниковых навигационных систем и вводом поправок, определяемых на береговой локальной контрольно-корректирующей станции и бортовой инерциальной навигационной системой и вычислением навигационных параметров, отличающийся тем, что определение навигационных элементов, таких как вектор скорости носовой и кормовой оконечностей судна, положение точки вращения судна, значения угловой скорости поворота судна, отклонения центра тяжести судна от заданной траектории, расстояния от носовой и кормовой оконечностей судна до левой и правой бровки канала, параметров движения характерных точек, производится на основании информации, получаемой от расположенных в двух опорных точках вычислителей навигационных величин, вычисляются навигационные параметры, в том числе текущее расстояние от точек носовых и кормовых обводов судна до опасной изобаты, скорости сближения точек носовых и кормовых обводов судна с опасной изобатой, поперечных составляющих носовой и кормовой оконечностей судна, векторов носовой и кормовой скоростей судна, угловой скорости вращения судна относительно полюса вращения, а вычисленные навигационные параметры используются электронно-картографической навигационно-информационной системой, для чего опорные точки, в которых размещают вычислители навигационных величин, располагают на крыльях судна, в плоскости, перпендикулярной к продольной оси симметрии судна и симметрично относительно нее, при этом каждый из вычислителей навигационных величин выдает результаты измерений по ГНСС и инерциальной навигационной системы в виде текущих значений своей широты и долготы, курса и скорости с частотой выдачи данных не менее 1 Гц.
Способ отличается также тем, что с ЭКНИС данные по маршруту поступают на авторулевой, а с него на водометные движители и азиподы (для судов, оборудованными такими движителями).
Технический результат заключается в том, что предлагаемое решение создает независимый автономный дополнительный навигационный канал получения данных, достаточных для выполнения следующих действий и при этом гарантирует точность выполнения этих действий:
- проводка судна в стесненных условиях - канал, пролив и т.д.;
- подход и швартовка судна к стационарному грузовому терминалу;
- подход и швартовка судна к выносным погрузочным устройствам различных типов;
- маневрирование и подход судна к танкеру-накопителю при рейдовой перевалкегрузов.
Сущность изобретения состоит в том, что создается дополнительный автономный канал определения данных, используемых только при движении в трудных местах и швартовке, и используется этот канал только в случаях, требующих повышенной точности навигационных данных, причем эти результаты могут использоваться как совместно со стандартным судовым программно-аппаратным комплексом, так и носимым лоцманским планшетом.
Сущность изобретения поясняется следующим образом.
1. Работа осуществляется с помощью двух опорных точек, в которых производятся высокоточные определения широты, долготы и вектора скорости в реальном масштабе времени с использованием транспондеров. В каждый транспондер входит блок ГНСС, волоконно-оптический гироскоп, акселерометр, магнитометр, датчик давления, блок счисления и фильтр Калмана.
2. Производится передача поправок, определяемых на локальной контрольно-корректирующей станции. При этом применяются различные варианты передачи поправок - дифференциальные режимы (DGPS), технология реальной кинематики (RTK). Используется несколько сетевых спутниковых радионавигационных систем - ГЛОНАСС, GPS, и другие.
3. Благодаря использованию инерциальной навигационной системы для сглаживания общих итоговых погрешностей обеспечивается надежность получения навигационных отчетов в опорных точках, поскольку возможна нестабильность или потеря спутникового сигнала.
4. Производится расчет текущих навигационных параметров судна на основе получаемых данных в опорных точках; транспондеры, расположенные на одном уровне, например, на крыльях ходовой рубки, образуют фиксированную базу, вычитая длину которой, из длины ходового мостика, определенной с навигационных спутников, можно получить поправку длины для расстояний до левой и правой бровок канала.
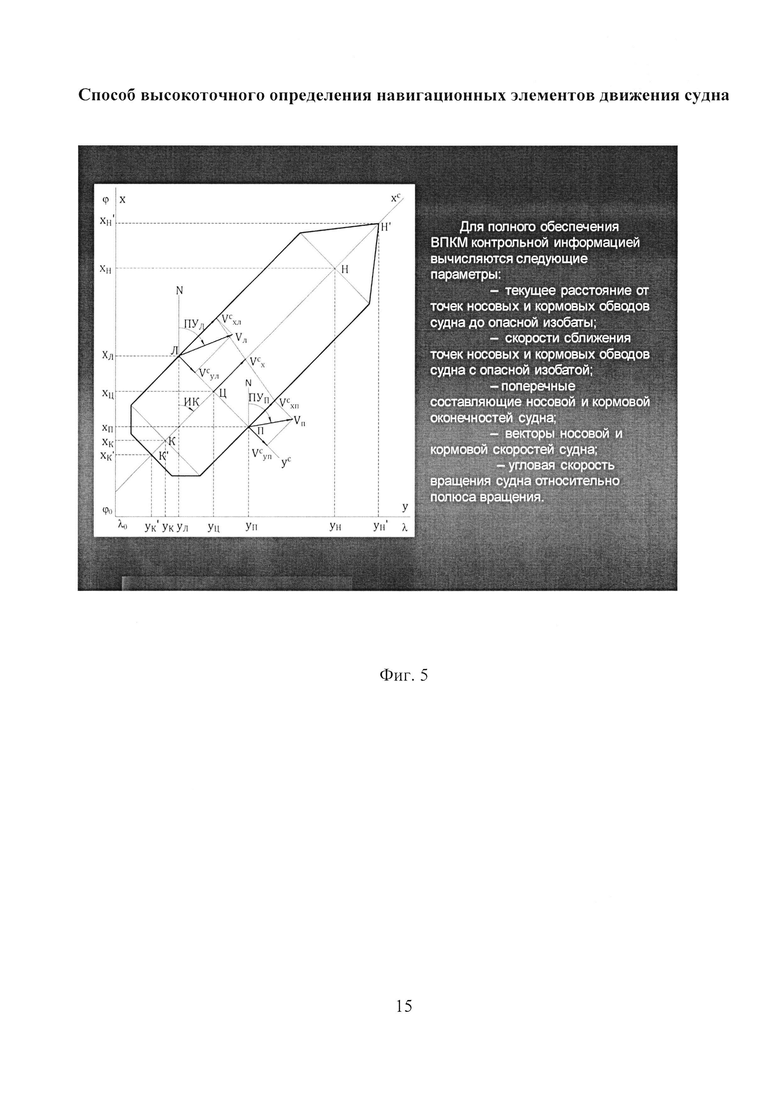
5. На электронной карте с текущей навигационной обстановкой в удобной форме отображаются текущие параметры движения. Для полного обеспечения вахтенного помощника капитана контрольной информацией вычисляются следующие параметры:
- текущее расстояние от точек носовых и кормовых обводов судна до опасной изобаты или другой навигационной опасностью;
- скорости сближения точек носовых и кормовых обводов судна с опасной изобатой или другой навигационной опасностью;
- поперечные составляющие скоростей носовой и кормовой оконечностей судна;
- векторы носовой и кормовой скоростей судна;
- угловая скорость вращения судна относительно полюса вращения.
Параметры контроля проводки и швартовки судна:
- дистанция от носовой оконечности судна до причальной точки;
- истинный курс судна;
- отклонения носовой и кормовой оконечностей судна от линии заданного пути;
- скорости отклонения носовой и кормовой оконечностей от линии заданного пути;
- векторы скоростей носовой и кормовой оконечностей судна.
Исходной информацией для вычисления выше перечисленных величин являются:
- продольная скорость, истинный курс и координаты носовой и кормовой оконечностей судна;
- географические координаты причальной точки;
- географические координаты точки выхода судна на заданную линию пути.
Ориентация вычислителя навигационных величин обеспечивается в прямоугольной геоцентрической системе координат. Система координат вычислителя навигационных величин должна быть совмещена с судовой прямоугольной системой координат. При этом важно обеспечить совмещение осей. Смещение осей учитывается поправкой в программном обеспечении.
Способ поясняется графическими материалами, где показаны:
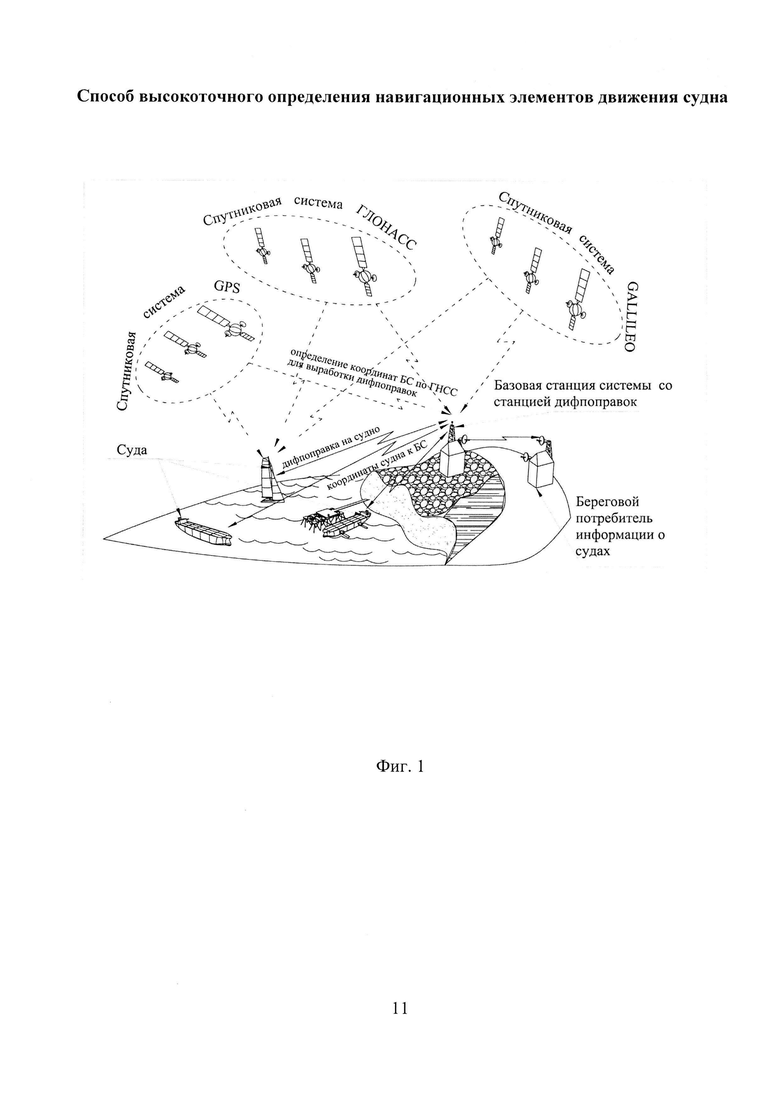
- на фиг. 1 - дана общая схема реализации способа в портовой акватории и на подходе к ней;
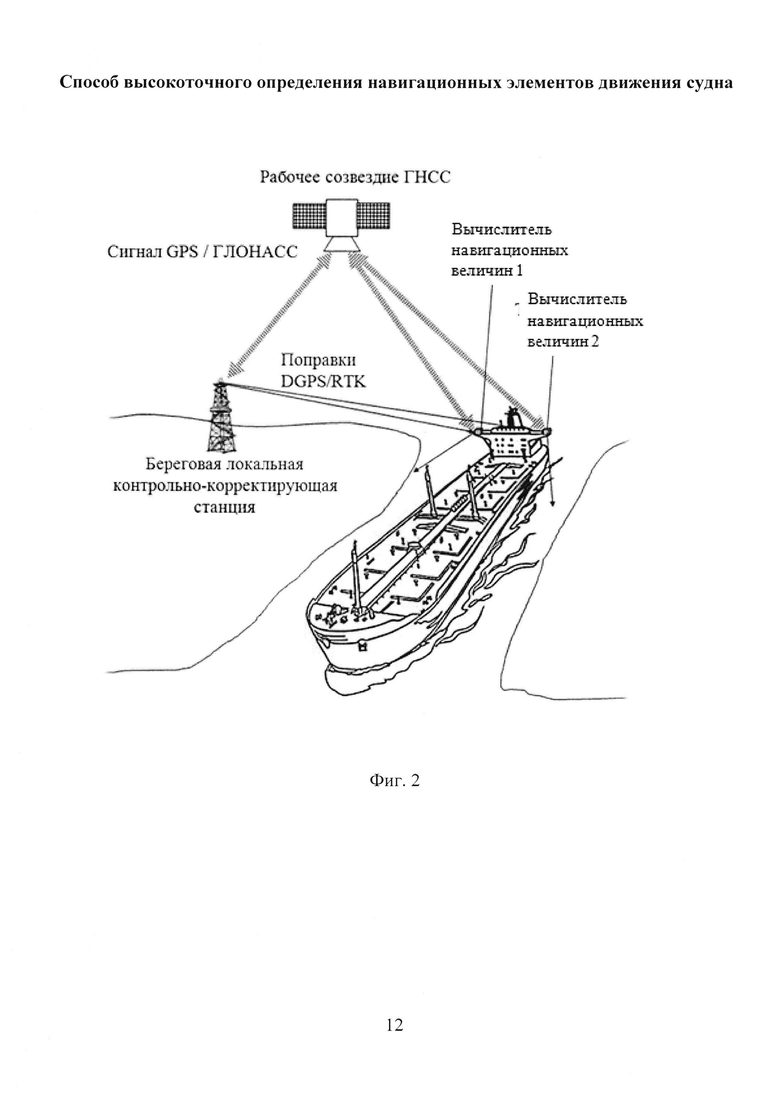
- на фиг. 2 - представлена работа вычислителя навигационных величин на крыльях мостика;
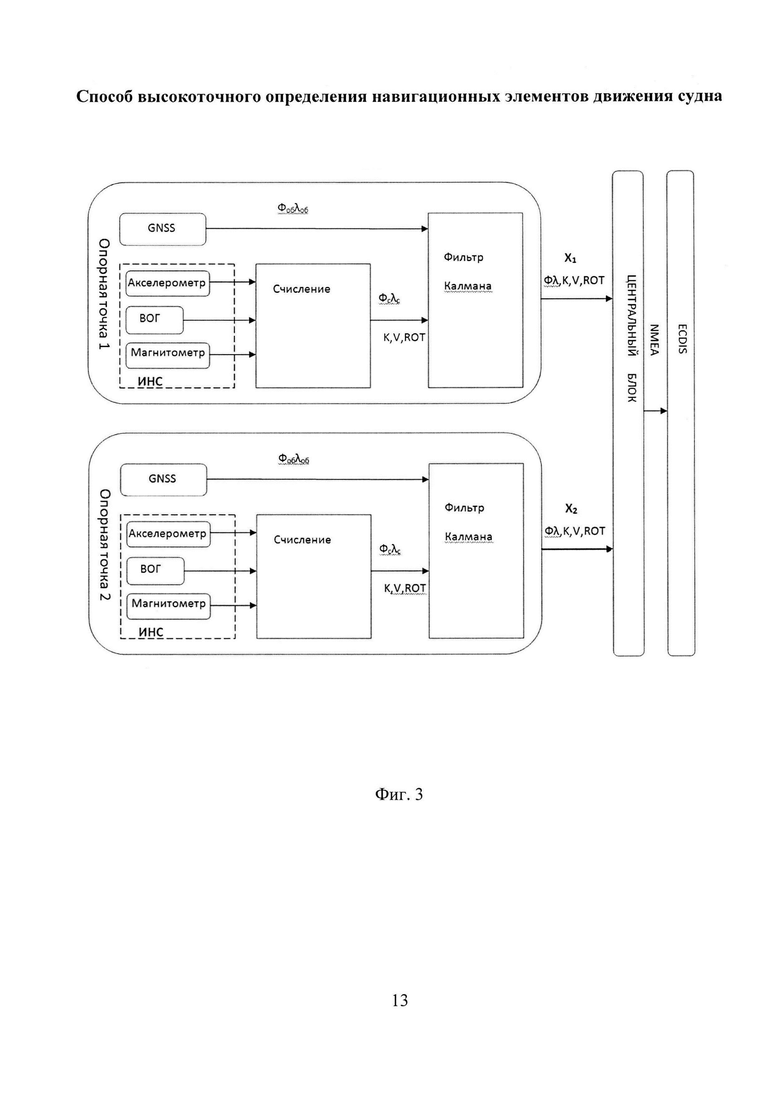
- на фиг. 3 - дана блок схема вычислителей навигационных величин;
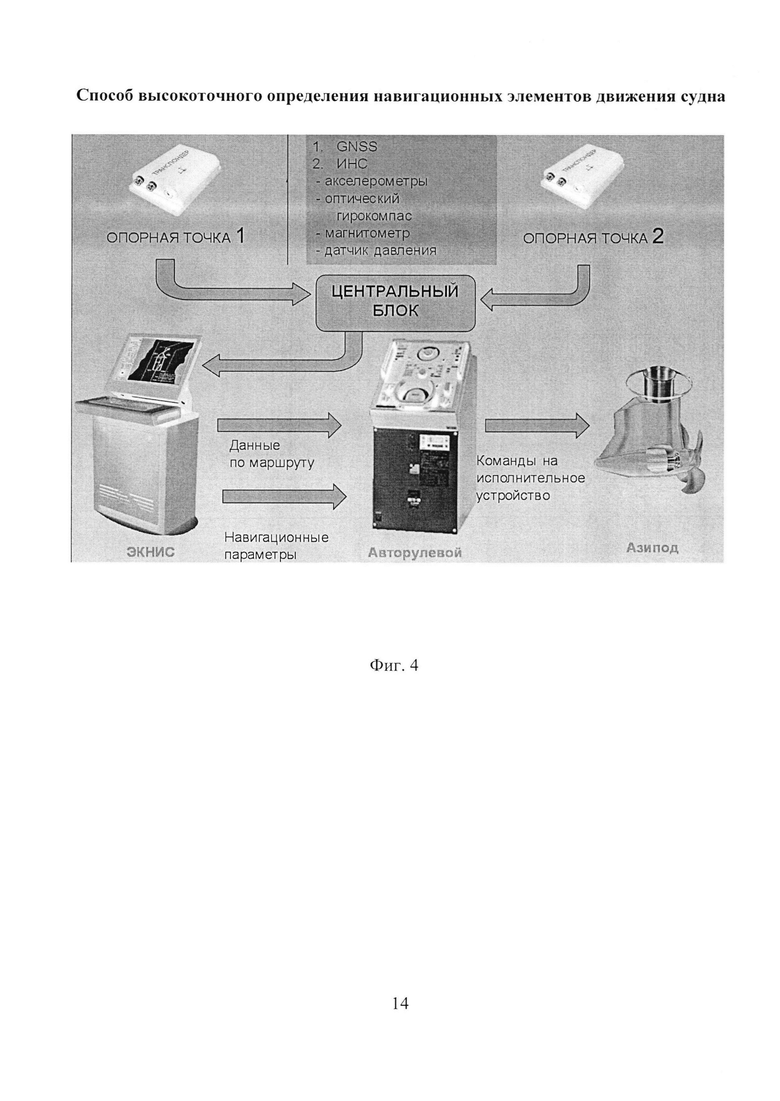
- на фиг. 4 - дана схема дополнительной инерционно-навигационной системы с двумя опорными точками с основными блоками;
- на фиг. 5 - дана геометрическая интерпретация способа с двумя опорными точками.
На фиг. 1. Изображен непосредственный момент швартовки судна к причалу при помощи двух буксиров-толкачей, а также танкер и парусная яхта, входящие в акваторию. Рабочее созвездие ГНСС представлено навигационными спутниками систем GPS, ГЛОНАСС, Gallileo. Береговая локальная контрольно-корректирующая станция (на рисунке обозначена как Базовая станция системы со станцией дифпоправок), вырабатывает дифференциальные поправки на основании информации со спутников и передает их на суда и береговым потребителям, которыми могут быть различные портовые службы или другие организации. Полученные поправки используются судами для корректировки определенных ими навигационных параметров, в том числе для определения текущего местоположения и расстояния до причала при швартовке.
На фиг. 2 показано непосредственное использование технологии двух опорных точек, расположенных на крыльях ходового мостика и представленных вычислителями навигационных величин, структурная схема которых приведена на Фиг. 3.
На фиг. 3 дана блок схема вычислителя навигационных величин. Вычислитель навигационных величин содержит ГНСС, ИНС, включающую акселерометр, оптический компас, магнитометр, датчик давления.
На фиг. 4 дана схема дополнительной инерционно-навигационной системы с двумя опорными точками с основными блоками: опорная точка 1; опорная точка 2; центральный блок; данные по маршруту; команда на исполнительное устройство; навигационные параметры; ЭКНИС; авторулевой; азипод.
На фиг. 5 дана геометрическая интерпретация способа с двумя опорными точками, где показано, что для полного обеспечения контрольной информацией вычисляют следующие параметры:
- текущее расстояние от точек носовых и кормовых обводов от судна до опасной изобаты;
- - скорости сближения точек носовых и кормовых обводов судна с опасной изобатой;
- попутные составляющие носовой и кормовой оконечностей судна;
- угловую скорость вращения судна относительно полюса вращения.
Существуют три возможных варианта реализации способа:
1. Судовой. Вычислители навигационных величин стационарно устанавливаются на крыльях мостика, прокладываются кабели к основному блоку, расположенному на мостике, откуда информация поступает из основного блока по интерфейсному кабелю на судовой ЭКНИС. В открытом море вычислители навигационных величин находятся в выключенном состоянии, в стесненных условиях их включают.
2. Носимый. Лоцман для осуществления проводки и швартовки судна приносит с собой 2 вычислителя навигационных величин и располагает их в любом удобном месте на крыльях мостика. Результаты измерений вычислителей навигационных величин, каждый по своему Wi-Fi каналу передаются на лоцманский планшет с электронной картой, где и отображаются.
3. Мобильный. Используется для случая работы линейных судов в порту, аналогичен судовому варианту с функциональной точки зрения, дает возможность капитану обоснование безлоцманской проводки судов в конкретном порту.
Преимущества предлагаемого способа при использовании включают в себя:
- увеличение безопасности и улучшение эффективности управления судном в портовой зоне, подходном канале и т.д.;
- ни отказ судового гирокомпаса, ни ограниченная видимость не являются критическими проблемами;
- как средство регистрации и проигрывания ситуации является неоценимым инструментом для расследования аварийных ситуаций;
- заинтересованность стивидорных компаний в повышении эксплуатационных нагрузок причальных сооружений, оптимизации времени швартовки судна с учетом гидрометеорологических условий, увеличении интенсивности грузопотоков, также требует технических решений, которые обеспечивали бы соблюдение требований по обеспечению безопасности объектов морского транспорта - Согласно п. 198 Постановления правительства РФ от 12 августа 2010. №620 «Об утверждении технического регламента о безопасности объектов морского транспорта»: «198. Объекты инфраструктуры морского транспорта, на которых осуществляется перегрузка опасных грузов, в том числе нефтепродуктов, должны быть оснащены техническими средствами мониторинга и документирования швартовных и грузовых операций».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления поперечным и продольным движением судна относительно морского грузового терминала | 2024 |
|
RU2834495C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
Изобретение относится к способу высокоточного определения навигационных элементов движения судна. Для определения навигационных элементов, а именно: вектор скорости носовой и кормовой оконечностей судна, положение точки вращения судна, значения угловой скорости поворота судна, отклонения центра тяжести судна от заданной траектории, расстояния от носовой и кормовой оконечностей судна до левой и правой бровки канала, параметров движения характерных точек, вычисляют навигационные параметры спутниковыми навигационными системами и бортовой инерциальной навигационной системой с учетом поправок береговой локальной контрольно-корректирующей станции. Вычисляют следующие навигационные параметры, а именно: текущее расстояние от точек носовых и кормовых обводов судна до опасной изобаты, скорости сближения точек носовых и кормовых обводов судна с опасной изобатой, поперечных составляющих носовой и кормовой оконечностей судна, векторов носовой и кормовой скоростей судна, угловой скорости вращения судна относительно полюса вращения. Вычисленные навигационные параметры используются электронно-картографической навигационно-информационной системой определенным образом. Обеспечивается надежность проводки судна в стесненных условиях и при ограниченной видимости. 1 з.п. ф-лы, 5 ил.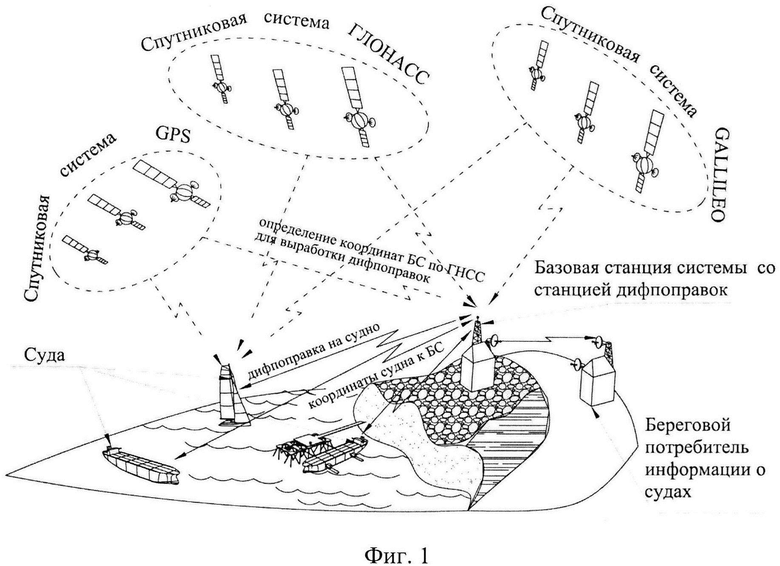
1. Способ высокоточного определения навигационных элементов движения судна с использованием спутниковых навигационных систем и вводом поправок, определяемых на береговой локальной контрольно-корректирующей станции и бортовой инерциальной навигационной системой и вычислением навигационных параметров, отличающийся тем, что определение навигационных элементов, таких как вектор скорости носовой и кормовой оконечностей судна, положение точки вращения судна, значения угловой скорости поворота судна, отклонения центра тяжести судна от заданной траектории, расстояния от носовой и кормовой оконечностей судна до левой и правой бровки канала, параметров движения характерных точек, производится на основании информации, получаемой от расположенных в двух опорных точках вычислителей навигационных величин, вычисляются навигационные параметры, в том числе текущее расстояние от точек носовых и кормовых обводов судна до опасной изобаты, скорости сближения точек носовых и кормовых обводов судна с опасной изобатой, поперечных составляющих носовой и кормовой оконечностей судна, векторов носовой и кормовой скоростей судна, угловой скорости вращения судна относительно полюса вращения, а вычисленные навигационные параметры используются электронно-картографической навигационно-информационной системой, для чего опорные точки, в которых размещают вычислители навигационных величин, располагают на крыльях судна, в плоскости, перпендикулярной к продольной оси симметрии судна и симметрично относительно нее, при этом каждый из вычислителей навигационных величин выдает результаты измерений по ГНСС и инерциальной навигационной системы в виде текущих значений своей широты и долготы, курса и скорости с частотой выдачи данных не менее 1 Гц.
2. Способ по п. 1, отличающийся тем, что с ЭКНИС данные по маршруту поступают на авторулевой, а с него на водометные движители и азиподы (для судов, оборудованными такими движителями).
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2011 |
|
RU2463205C2 |
| US 8838374 B2, 16.09.2014 | |||
| US 7136751 B2, 14.11.2006. | |||

