Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
Уровень техники
[0002]
Технология, описанная в источнике 1, известна как технология управления движением рассматриваемого транспортного средства на перекрестке. Устройство помощи при вождении, описанное в источнике 1, обеспечивает вариант нормативного поведения, в котором учитывается риск контакта между препятствиями вокруг рассматриваемого транспортного средства и рассматриваемым транспортным средством.
СПИСОК ЦИТАТ
Патентная литература
[0003]
Источник 1: JP 2011-096105 A
Раскрытие изобретения
Техническая задача
[0004]
Когда рассматриваемое транспортное средство движется на перекрестке по своему маршруту движения, а другое транспортное средство входит на перекресток с маршрута, отличного от маршрута движения рассматриваемого транспортного средства, за другим транспортным средством может находиться следующее транспортное средство. В таком случае, даже когда обнаруживается, что другое транспортное средство, въезжающее на перекресток, не препятствует движению рассматриваемого транспортного средства, следующее транспортное средство, которое может находиться позади другого транспортного средства, может «проскользнуть» мимо другого транспортного средства и выехать на перекресток. Из-за этого рассматриваемое транспортное средство может не пройти через перекресток.
Задача настоящего изобретения состоит в том, чтобы, даже когда другое транспортное средство въезжает на перекресток на маршруте движения рассматриваемого транспортного средства с маршрута, отличного от маршрута движения рассматриваемого транспортного средства, и может быть следующее транспортное средство позади другого транспортного средства, разрешить оценку относительно того, может ли следующее транспортное средство проскользнуть мимо другого транспортного средства.
РЕШЕНИЕ ЗАДАЧИ
[0005]
Согласно аспекту настоящего изобретения обеспечен способ помощи при вождении, включающий в себя: обнаружение первого другого транспортного средства, въезжающего на перекресток на первом маршруте, где рассматриваемое транспортное средство движется по второму маршруту, отличному от первого маршрута; прогнозирование того, остановится ли первое другое транспортное средство на перекрестке, и прогнозирование положения остановки первого другого транспортного средства, когда прогнозируется, что первое другое транспортное средство остановится на перекрестке; вычисление минимального расстояния первого промежутка между кузовом транспортного средства первого другого транспортного средства и окружающим объектом вокруг первого другого транспортного средства или между кузовом транспортного средства первого другого транспортного средства и краем дороги полосы движения первого другого транспортного средства, когда первое другое транспортное средство останавливается в прогнозируемом положении остановки; и прогнозирование в соответствии с вычисленным минимальным расстоянием, может ли второе другое транспортное средство, которое является следующим транспортным средством за первым другим транспортным средством, проскользнуть через первый промежуток позади первого другого транспортного средства.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0006]
Согласно аспекту настоящего изобретения возможно, даже когда другое транспортное средство входит на перекресток на маршруте движения рассматриваемого транспортного средства с маршрута, отличного от маршрута движения рассматриваемого транспортного средства, и следующее транспортное средство может быть позади другого транспортного средства, оценить, может ли следующее транспортное средство проскользнуть мимо другого транспортного средства.
Задача и преимущества изобретения будут реализованы и достигнуты посредством элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и следующее подробное описание являются иллюстративными и пояснительными и не ограничивают изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007]
Фиг. 1 - блок-схема, иллюстрирующая пример устройства помощи при вождении согласно варианту осуществления изобретения;
Фиг. 2 - иллюстративная диаграмма примера способа помощи при вождении согласно варианту осуществления изобретения;
Фиг. 3 - блок-схема, иллюстрирующая пример функциональной структуры контроллера, показанного на фиг. 1;
Фиг. 4 - иллюстративная диаграмма примера сцены вождения, где препятствием на пути другого транспортного средства является пешеход;
Фиг. 5 - иллюстративная диаграмма первого примера сцены вождения, где препятствием на пути другого транспортного средства является транспортный затор впереди на пути другого транспортного средства;
Фиг. 6 - иллюстративная диаграмма второго примера сцены вождения, где препятствием на пути другого транспортного средства является транспортный затор впереди на пути другого транспортного средства;
Фиг. 7 - иллюстративная диаграмма второго примера сцены вождения, где препятствием на пути другого транспортного средства является другое транспортное средство, которое пересекается с путем другого транспортного средства;
Фиг. 8 - иллюстративная диаграмма примера способа помощи при вождении в Т-образном соединении;
Фиг. 9 - иллюстративная диаграмма примера края дороги полосы движения другого транспортного средства;
Фиг. 10 - иллюстративная диаграмма другого примера промежутка, через который может проскользнуть следующее транспортное средство;
Фиг. 11A - иллюстративная диаграмма (1) минимального расстояния промежутка между кузовом транспортного средства другого транспортного средства и краем дороги;
Фиг. 11В - иллюстративная диаграмма (2) минимального расстояния промежутка между кузовом транспортного средства другого транспортного средства и краем дороги;
Фиг. 11C - иллюстративная диаграмма (1) минимального расстояния промежутка между кузовом транспортного средства другого транспортного средства и окружающим объектом;
Фиг. 11D - иллюстративная диаграмма (2) минимального расстояния промежутка между кузовом транспортного средства другого транспортного средства и окружающим объектом;
Фиг. 12 - иллюстративная диаграмма примера способа помощи при вождении при рассмотрении другого следующего транспортного средства, которое находится позади следующего транспортного средства другого транспортного средства;
Фиг. 13A - блок-схема (1) способа помощи при вождении согласно варианту осуществления изобретения; а также
Фиг. 13B - блок-схема (2) способа помощи при вождении согласно варианту осуществления изобретения.
Описание вариантов осуществления изобретения
[0008]
Ниже со ссылкой на чертежи будут описаны варианты осуществления настоящего изобретения. В нижеследующем описании чертежей одинаковые или подобные части обозначены одинаковыми или подобными ссылочными позициями. Однако чертежи схематичны. Технологическая идея настоящего изобретения может быть по-разному модифицирована в пределах технологического объема, определенного в прилагаемой формуле изобретения.
[0009]
(Структура)
Устройство помощи при вождении согласно варианту осуществления, например, установлено в транспортном средстве (в дальнейшем транспортное средство, установленное с устройством помощи при движении согласно варианту осуществления изобретения, упоминается как «рассматриваемое транспортное средство»). Устройство помощи при вождении согласно варианту осуществления изобретения может выполнять, в качестве помощи при вождении, автономное вождение для выполнения автономного вождения, так что рассматриваемое транспортное средство движется по маршруту движения, и руководство для побуждения водителя к вождению, чтобы рассматриваемое транспортное средство двигалось по маршруту движения.
[0010]
Автономное вождение включает в себя случаи, когда все элементы управления движением, торможением и рулевым управлением рассматриваемого транспортного средства выполняются без участия пользователя транспортного средства (водителя), а также случаи, когда по меньшей мере одно управление движением, торможением или рулевым управлением рассматриваемого транспортного средства выполняется. Автономное вождение может быть управлением следования за предшествующим транспортным средством, управлением расстоянием между транспортными средствами, управлением предотвращения съезда с полосы движения и т.п.
[0011]
Как показано на фиг. 1, устройство 1 помощи при вождении согласно варианту осуществления изобретения включает в себя блок 2 датчиков, блок 3 определения местоположения, базу 4 данных карт (описанную на чертеже как «MAP DB»), блок 5 связи, навигационное устройство 6, блок 7 вывода, контроллер 8, устройство 9 управления перемещением и исполнительный механизм 10.
Блок 2 датчиков обнаруживает окружающую среду рассматриваемого транспортного средства, например, объекты вокруг рассматриваемого транспортного средства. Блок 2 датчиков обнаруживает окружающую среду рассматриваемого транспортного средства, включая объекты, присутствующие вокруг рассматриваемого транспортного средства, относительные положения между рассматриваемым транспортным средством и объектами, расстояния между рассматриваемым транспортным средством и объектами и направления, в которых находятся объекты.
[0012]
Блок 2 датчиков может включать в себя дальномер, такой как лазерный дальномер (LRF, laser range-finder) или радар, и камеру. Камера может быть, например, стереокамерой. Камера может быть монокулярной камерой, посредством которой один и тот же объект может быть отображен из множества точек обзора для вычисления расстояния до объекта. В качестве альтернативы, расстояние до объекта может быть вычислено на основе положения контакта с землей объекта, обнаруженного из захваченного изображения. Блок 2 датчиков выводит информацию об окружающей среде, которая является информацией об обнаруженной окружающей среде, в контроллер 8.
[0013]
Блок 3 определения местоположения измеряет текущее положение рассматриваемого транспортного средства. Блок 3 определения местоположения может включать в себя, например, приемник глобальной навигационной спутниковой системы (GNSS, global navigation satellite system). Приемник GNSS представляет собой, например, приемник глобальной системы определения местоположения (GPS, global positioning system) или тому подобное, и принимает радиоволны от множества навигационных спутников для измерения текущего местоположения рассматриваемого транспортного средства.
Блок 3 определения местоположения может измерять текущее положение рассматриваемого транспортного средства, например, посредством одометрии. Блок 3 определения местоположения выводит полученное текущее положение рассматриваемого транспортного средства в контроллер 8.
[0014]
База 4 данных карт может хранить данные карты высокой четкости (в дальнейшем называемые просто «карта высокой четкости»), подходящие в качестве карты для автономного вождения. Карта высокой четкости - это картографические данные с более высоким разрешением, чем картографические данные для навигации (далее просто называемые «навигационная карта»), и включает в себя более подробную информацию о полосах движения, чем информацию о дорогах.
Например, карта высокой четкости включает в себя в качестве информации о полосах движения информацию об узлах полосы, указывающую контрольную точку на контрольной линии полосы движения (например, центральную линию полосы движения), и информацию о звеньях полосы движения, указывающую режим участка полосы движения между узлами полосы движения.
[0015]
Информация об узле полосы движения включает в себя идентификационный номер узла полосы движения, его координаты местоположения, количество соединенных звеньев полосы движения и идентификационные номера соединенных звеньев полосы движения. Информация о звеньях полосы движения включает в себя идентификационный номер звена полосы движения, тип полосы, ширину полосы движения, тип линии полосы движения, форму полосы движения, форму разметки полосы движения и форму контрольной линии полосы движения. Карта высокого разрешения также включает в себя типы и координаты местоположения объектов, таких как светофоры, стоп-линии, знаки, здания, столбы инженерных сетей, бордюры и пешеходные переходы, расположенные на полосе или рядом с полосой движения, а также идентификационные номера узлов полосы движения и идентификационные номера звеньев полос, соответствующих координатам местоположения объектов.
[0016]
Поскольку карта высокой четкости включает в себя информацию об узлах и звеньях полосы движения, можно идентифицировать полосу движения рассматриваемого транспортного средства в маршруте движения. Карта высокого разрешения включает в себя координаты, которые могут представлять положения в направлении расширения и направлении полосы движения по ширине. Карта высокой четкости включает в себя координаты (например, долготу, широту и высоту), которые могут представлять положения в трехмерном пространстве, так что полосы движения и вышеупомянутые объекты могут быть описаны как формы в трехмерном пространстве.
[0017]
Кроме того, база 4 данных карт может хранить навигационную карту. Навигационная карта включает в себя информацию о дорогах. Например, навигационная карта включает в себя в качестве информации на основе дороги информацию об дорожном узле, указывающую опорную точку на опорной линии дороги (например, центральную линию дороги), и информацию о звеньях дороги, указывающую режим участка дороги между дорожными узлами. Информация об дорожном узле включает в себя идентификационный номер дорожного узла, его координаты местоположения, количество соединенных звеньев дороги и идентификационные номера соединенных звеньев дороги.
[0018]
Информация о звеньях дороги включает в себя идентификационный номер звеньев дороги, стандарт дороги, длину звена, количество полос движения, ширину дороги и ограничение скорости.
В дополнение к информации о карте, как указано выше, база 4 данных карт может включать в себя информацию о приоритете и т.п., которые представляют собой информацию о приоритете между дорогами, пересекающимися на перекрестке.
[0019]
Блок 5 связи выполняет беспроводную связь с устройством связи за пределами рассматриваемого транспортного средства. Способ связи посредством блока 5 связи может быть, например, беспроводной связью через сеть мобильной телефонной связи общего пользования, связью между транспортными средствами, связью между дорогой и транспортным средством или спутниковой связью.
Отметим, что устройство 1 помощи при вождении может получать карту высокой четкости и навигационную карту через телематическую службу, такую как связь между транспортными средствами или связь между транспортными средствами, посредством блока 5 связи вместо базы 4 данных карт.
[0020]
Использование телематической службы избавляет рассматриваемое транспортное средство от необходимости хранить картографические данные с большим объемом данных, что может снизить объем памяти. Кроме того, использование телематических служб позволяет получать обновленные картографические данные, тем самым обеспечивая точное понимание реальных дорожных ситуаций, таких как изменения в структуре дороги и отсутствие строительной площадки. Кроме того, с использованием телематической службы можно использовать данные карты, созданные на основе данных, собранных из множества других транспортных средств, отличных от рассматриваемого транспортного средства, так что может быть получена точная информация.
[0021]
Навигационное устройство 6 вычисляет маршрут от текущего местоположения рассматриваемого транспортного средства до его пункта назначения. Когда пользователь управляет навигационным устройством 6 для ввода пункта назначения, маршрут движения от текущего положения до пункта назначения задается методом, основанным на теории поиска в графах, например алгоритме Дейкстры или A*. Навигационное устройство 6 обеспечивает руководство по маршруту для пользователя через блок 7 вывода в соответствии с маршрутом движения.
Кроме того, установленный маршрут движения выводится в контроллер 8 для использования при автономном вождении и помощи при вождении для рассматриваемого транспортного средства.
[0022]
Блок 7 вывода выводит различную визуальную информацию и звуковую информацию. Например, блок 7 вывода может отображать экран карты вокруг рассматриваемого транспортного средства и визуальную информацию о руководстве по рекомендованному маршруту. Дополнительно, например, блок 7 вывода может выводить звуковые указания, такие как руководство по вождению на основе установленного маршрута движения и руководство по дороге на основе данных карты дорог вокруг рассматриваемого транспортного средства.
Кроме того, например, блок 7 вывода может отображать дисплей указания или выводить сообщение звукового указания, чтобы оказать водителю помощь при вождении посредством контроллера 8.
[0023]
Контроллер 8 представляет собой электронный блок управления (ECU, electronic control unit), выполненный с возможностью оказания помощи при вождении рассматриваемого транспортного средства. Контроллер 8 включает в себя процессор 11 и периферийные компоненты, такие как запоминающее устройство 12. Процессор 11 может быть, например, CPU или MPU. Запоминающее устройство 12 может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство 12 может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также ПЗУ и ОЗУ, используемые в качестве основных запоминающих устройств. Отметим, что контроллер 8 может быть выполнен в виде функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, контроллер 8 может включать в себя программируемое логическое устройство (PLD, programmable logic device), такое как программируемая вентильная матрица (FPGA, field-programmable gate array) или подобное.
[0024]
Контроллер 8 формирует траекторию движения, которая позволяет рассматриваемому транспортному средству двигаться по маршруту, установленному навигационным устройством 6, на основе информации об окружающей среде, вводимой из блока 2 датчиков, и текущего положения рассматриваемого транспортного средства, измеренного блоком 3 определения местоположения. Контроллер 8 выдает сформированную траекторию движения устройству 9 управления движением.
Устройство 9 управления движением - это ECU, выполненный с возможностью управления движением рассматриваемого транспортного средства. Устройство 9 управления перемещением включает в себя процессор и периферийные компоненты, такие как запоминающее устройство. Процессор может быть, например, CPU или MPU. Запоминающее устройство может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также ПЗУ и ОЗУ, используемые в качестве основных запоминающих устройств.
[0025]
Отметим, что устройство 9 управления перемещением может быть выполнено в виде функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, устройство 9 управления перемещением может включать в себя PLD, такой как FPGA, и т.п. Устройство 9 управления движением может быть либо электронным блоком управления, интегрированным с контроллером 8, либо отдельным электронным блоком управления. Устройство 9 управления движением приводит в действие исполнительный механизм 10, позволяя рассматриваемому транспортному средству двигаться автономно, так что рассматриваемое транспортное средство движется по траектории движения, формируемой контроллером 8.
[0026]
Привод 10 управляет рулевым колесом, положением акселератора и тормозным устройством рассматриваемого транспортного средства в ответ на управляющий сигнал от устройства 9 управления движением, чтобы инициировать поведение транспортного средства рассматриваемого транспортного средства. Привод 10 может включать в себя, например, привод рулевого управления, привод положения акселератора и привод управления тормозом. Привод рулевого управления управляет направлением поворота и величиной поворота рулевого колеса рассматриваемого транспортного средства. Привод положения акселератора управляет положением акселератора рассматриваемого транспортного средства. Привод управления тормозом управляет работой тормозного устройства рассматриваемого транспортного средства.
[0027]
Схема способа помощи при вождении устройством 1 помощи при вождении будет описана со ссылкой на фиг. 2.
Впереди есть перекресток (пересечение) на первом маршруте 21, по которому движется рассматриваемое транспортное средство 20, и первое другое транспортное средство v1 въезжает на перекресток со второго маршрута 22, отличного от первого маршрута 21. Кроме того, второе другое транспортное средство v2, которое является следующим транспортным средством за первым другим транспортным средством v1, движется за первым другим транспортным средством v1.
Будущий запланированный маршрут p0, по которому рассматриваемое транспортное средство 20 движется по перекрестку, является поворотом направо, и путь p1 первого другого транспортного средства v1 также является поворотом направо. Соответственно, первое другое транспортное средство v1 не препятствует движению рассматриваемого транспортного средства 20.
[0028]
Однако приоритет для рассматриваемого транспортного средства 20 при движении по маршруту p0 для поворота направо через перекресток ниже, чем приоритет для второго другого транспортного средства v2 при движении по полосе движения первого другого транспортного средства v1. Другими словами, на перекрестке приоритет для второго другого транспортного средства v2, которое движется прямо, выше, чем приоритет для рассматриваемого транспортного средства 20, которое движется по маршруту p0, чтобы повернуть направо на перекрестке. Соответственно, второе другое транспортное средство v2 может двигаться прямо по перекрестку. Благодаря этому, даже когда обнаруживается, что первое другое транспортное средство v1 не препятствует движению рассматриваемого транспортного средства 20, второе другое транспортное средство v2 может проскользнуть между первым другим транспортным средством v1 и краем дороги и выехать прямо на перекресток. Следовательно, невозможно продвинуть рассматриваемое транспортное средство к запланированному маршруту p0 для проезда через перекресток.
[0029]
Таким образом, сначала контроллер 8 оценивает, остановится ли первое другое транспортное средство v1 в соответствии с ситуацией в точке впереди на пути p1, где первое другое транспортное средство v1 проходит через перекресток.
В примере на фиг. 2, путь 23, на котором следующее транспортное средство o1 позади рассматриваемого транспортного средства 20 движется прямо через перекресток, пересекается с путем p1, на котором первое другое транспортное средство v1 поворачивает направо, так что следующее транспортное средство o1 становится препятствием на пути первого другого транспортного средства v1. Следовательно, контроллер 8 оценивает, остановится ли первое другое транспортное средство v1, и прогнозирует положение остановки первого другого транспортного средства v1.
[0030]
Затем контроллер 8 прогнозирует, может ли второе другое транспортное средство v2 проскользнуть между первым другим транспортным средством v1 и краем дороги движения позади остановившегося первого другого транспортного средства v1 и может ли оно выехать на перекресток. В частности, сначала вычисляется минимальное расстояние d1 промежутка между остановившимся первым другим транспортным средством v1 и краем дороги полосы движения. В дальнейшем промежуток между остановившимся первым другим транспортным средством v1 и краем дороги полосы движения может называться «первым промежутком».
Например, как показано на фиг. 2, первый промежуток может быть промежутком между кузовом транспортного средства первого другого транспортного средства v1 и краем дороги полосы движения первого другого транспортного средства v1, промежутком между кузовом транспортного средства первого другого транспортного средства v1 и бордюром, промежуток между кузовом транспортного средства первого другого транспортного средства v1 и другим объектом (например, стеной, ограждением, опорой, знаком и т.п. на краю дороги) или промежуток между кузовом транспортного средства первого другого транспортного средства v1 и множества других объектов).
[0031]
Контроллер 8 прогнозирует, может или нет второе другое транспортное средство v2 проскользнуть через первый промежуток позади первого другого транспортного средства v1, в соответствии с вычисленным минимальным расстоянием d1. Например, когда минимальное расстояние d1 первого промежутка равно или меньше порогового значения (например, равно или меньше заранее определенного размера, достаточно меньшего, чем ширина транспортного средства мотоцикла), контроллер 8 оценивает, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства v1.
[0032]
Кроме того, например, когда минимальное расстояние d1 первого промежутка меньше ширины w1 транспортного средства второго другого транспортного средства v2, контроллер 8 оценивает, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток. Напротив, когда минимальное расстояние d1 первого промежутка равно или больше ширины w1 транспортного средства, контроллер 8 оценивает, что второе другое транспортное средство v2 может проскользнуть через первый промежуток.
[0033]
Таким образом, оценивая возможность того, что второе другое транспортное средство v2 проскальзывает через первый промежуток позади первого другого транспортного средства v1, можно судить, будет ли второе другое транспортное средство v2 мешать движению рассматриваемого транспортного средства 20.
В результате рассматриваемое транспортное средство 20 может быть продвинуто к маршруту p0 для проезда через перекресток, даже когда первое другое транспортное средство v1 въезжает на перекресток впереди по маршруту 21, где рассматриваемое транспортное средство 20 движется с маршрута 22, отличного от маршрута 21, и за первым другим транспортным средством v1 может идти следующее транспортное средство.
[0034]
Далее будет описан пример функциональной структуры контроллера 8 со ссылкой на фиг. 3. Контроллер 8 включает в себя блок 30 распознавания объектов, блок 31 оценки собственного положения, блок 32 определения поведения при вождении и блок 33 формирования траектории. Функции блока 30 распознавания объектов, блока 31 оценки собственного положения, блока 32 определения поведения при вождении и блока 33 формирования траектории могут быть реализованы, например, позволяя процессору 11 контроллера 8 выполнять компьютерную программу. хранится в запоминающем устройстве 12.
[0035]
Блок 30 распознавания объектов распознает объекты вокруг рассматриваемого транспортного средства 20 на основе информации об окружающей среде, выводимой из блока 2 датчиков. Объектами, распознаваемыми блоком 30 распознавания объектов, могут быть, например, первое другое транспортное средство v1, транспортное средство, следующее за первым другим транспортным средством v1, объект вокруг первого другого транспортного средства v1, объект на пути первого другого транспортного средства v1, проходящего через перекресток, и край дороги (например, бордюр, ограждение, столб инженерной сети или дорожный знак) полосы движения первого другого транспортного средства v1.
[0036]
Например, используя известную технологию объединения датчиков, блок 30 распознавания объектов интегрирует результат распознавания объекта, обнаруженного путем выполнения обработки изображения на изображении, снятом камерой блока 2 датчиков, и результат обнаружения полученного объекта посредством дальномера, такого как лазерный дальномер или радар, для распознавания объекта вокруг рассматриваемого транспортного средства 20.
[0037]
В этом случае блок 30 распознавания объектов отслеживает распознанный объект. В частности, блок 30 распознавания объектов выполняет проверку идентичности (ассоциацию) объекта, распознаваемого в разное время, и прогнозирует поведение объекта на основе ассоциации.
Отметим, что блок 30 распознавания объектов может получать информацию, такую как положения, размеры и поведение объектов вокруг рассматриваемого транспортного средства 20, посредством связи между транспортными средствами или связи между дорогой и транспортным средством.
Блок 30 распознавания объектов выводит результат распознавания в блок 32 определения поведения при вождении.
[0038]
Блок 31 оценки собственного положения оценивает положение и положение рассматриваемого транспортного средства 20 на карте из текущего положения рассматриваемого транспортного средства 20, полученного блоком 3 определения местоположения, и данных карты, сохраненные в базе 4 данных карт. Блок 31 оценки собственного положения идентифицирует дорогу, по которой движется рассматриваемое транспортное средство 20, и, кроме того, полосу дороги, по которой движется рассматриваемое транспортное средство 20.
Блок 31 оценки собственного положения выводит результат оценки в блок 32 определения поведения при вождении.
[0039]
Блок 32 определения поведения при вождении оценивает, может или нет транспортное средство позади первого другого транспортного средства v1 (например, второе другое транспортное средство v2, которое является следующим транспортным средством позади первого другого транспортного средства v1) может проскользнуть мимо первого другого транспортного средства v1 и помешать продвижение рассматриваемого транспортного средства 20 на основе результата распознавания блоком 30 распознавания объектов, результата оценки блоком 31 оценки собственного положения и т.п.
Блок 32 определения поведения при вождении оценивает, следует ли продвигать рассматриваемое транспортное средство 20 к маршруту p0, чтобы проехать через перекресток, на основе того, может ли транспортное средство позади первого другого транспортного средства v1 препятствовать продвижению рассматриваемого транспортного средства 20.
[0040]
Блок 32 определения поведения при вождении включает в себя блок 40 управления информацией о перекрестках, блок 41 прогнозирования пути другого транспортного средства, блок 42 управления информацией о другом транспортном средстве/окружающей обстановке, блок 43 вычисления промежутка и блок 44 прогнозирования проскальзывания.
[0041]
Блок 40 управления информацией о перекрестках получает информацию 50 о приоритете рассматриваемого транспортного средства, касающуюся приоритета для рассматриваемого транспортного средства 20, чтобы двигаться по маршруту p0, чтобы пройти перекресток, на основе маршрута движения, установленного навигационным устройством 6, данных карты, хранящихся в базе 4 данных карт, и результата распознавания блоком 30 распознавания объектов.
Например, когда рассматриваемое транспортное средство 20 поворачивает направо на перекрестке на основе маршрута движения, установленного навигационным устройством 6, блок 40 управления информацией о перекрестках оценивает, что приоритет движения по маршруту p0 рассматриваемого транспортного средства 20 ниже, чем приоритет движения по полосе движения встречного транспортного средства (т. е. приоритет движения прямо через перекресток).
Когда рассматриваемое транспортное средство 20 движется прямо через перекресток или поворачивает налево на нем, блок 40 управления информацией о перекрестках оценивает, что приоритет движения по маршруту p0 рассматриваемого транспортного средства 20 не ниже приоритета движения по полосе движения встречного транспортного средства.
[0042]
Кроме того, блок 40 управления информацией о перекрестках может оценивать, указано ли, что рассматриваемое транспортное средство 20 должно быть временно остановлено на перекрестке впереди по маршруту p0 рассматриваемого транспортного средства 20, на основе данных карты, хранящихся в базе 4 данных карт. Когда указано, что рассматриваемое транспортное средство 20 должно быть временно остановлено, блок 40 управления информацией о перекрестках может оценить, что приоритет движения по маршруту p0 рассматриваемого транспортного средства 20 ниже, чем приоритет движения по дороге, пересекающейся с дорогой движения рассматриваемого транспортного средства 20.
Кроме того, когда блок 40 управления информацией о перекрестках обнаруживает временный знак остановки или временную стоп линию 24, показанную на фиг. 6, 7 и 9, исходя из результата распознавания блоком 30 распознавания объектов, блок 40 управления информацией о перекрестках может решить, что приоритет движения по маршруту p0 рассматриваемого транспортного средства 20 ниже, чем приоритет движения по дороге, пересекающейся с дорогой движения рассматриваемого транспортного средства 20. Блок 40 управления информацией о перекрестках выводит информацию 50 о приоритете рассматриваемого транспортного средства в блок 44 прогнозирования проскальзывания.
[0043]
Кроме того, блок 40 управления информацией о перекрестках оценивает положение края дороги полосы движения первого другого транспортного средства v1 на карте на основе результата оценки собственного положения рассматриваемого транспортного средства 20, данных карты, хранящихся в базе 4 данных карт, и результата распознавания блоком 30 распознавания объектов, и получает информацию 51 о крае дороги, касающуюся положения и формы края дороги. Блок 40 управления информацией о перекрестках может распознавать, в качестве положения края дороги, положение объекта, предусмотренного на крае дороги, такого как, например, бордюр, ограждение, столб инженерной сети или дорожный знак.
Блок 40 управления информацией о перекрестках выводит информацию 51 о крае дороги в блок 43 вычисления промежутка.
[0044]
Блок 42 управления информацией о другом транспортном средстве/окружающем пространстве оценивает положение объекта вокруг рассматриваемого транспортного средства 20 на карте на основе результата оценки собственного положения и результата распознавания блоком 30 распознавания объектов, и получает информацию 54 об окружающем объекте, касающуюся положения объекта вокруг рассматриваемого транспортного средства 20. Информация 54 об окружающем объекте может включать в себя информацию местоположения каждой точки на поверхности объекта вокруг рассматриваемого транспортного средства 20.
Кроме того, блок 42 управления информацией о другом транспортном средстве/окружающем пространстве оценивает положения других транспортных средств (например, первого другого транспортного средства v1 и второго другого транспортного средства v2) вокруг рассматриваемого транспортного средства 20 на карте на основе результата оценки собственное положение и результата распознавания блоком 30 распознавания объектов, и получает информацию 55 о конце другого транспортного средства, касающуюся каждой точки на поверхностях кузовов транспортных средств других транспортных средств.
[0045]
Блок 41 прогнозирования пути другого транспортного средства оценивает, остановится ли первое другое транспортное средство v1 на основе результата оценки собственного положения и результата распознавания блоком 30 распознавания объектов, и прогнозирует положение остановки первого другого транспортного средства v1. Блок 41 прогнозирования пути другого транспортного средства включает в себя блок 52 прогнозирования пути и блок 53 прогнозирования остановки.
Блок 41 прогнозирования пути другого транспортного средства прогнозирует путь p1 первого другого транспортного средства v1 на карте на основе результата оценки собственного положения и результата распознавания блоком 30 распознавания объектов. Например, блок 41 прогнозирования пути другого транспортного средства может прогнозировать путь p1 первого другого транспортного средства v1 на основе истории движения первого другого транспортного средства v1, прогнозируемого блоком 30 распознавания объектов, отношения местоположения между объектом вокруг первого другого транспортного средства v1, распознаваемого блоком 30 распознавания объектов, и первого другого транспортного средства v1 и т.п.
[0046]
Блок 53 прогнозирования остановки оценивает, будет ли прогнозируемый путь p1 первого другого транспортного средства v1 препятствовать пути рассматриваемого транспортного средства 20.
Например, в сцене вождения по фиг. 2 будущий запланированный маршрут p0, по которому рассматриваемое транспортное средство 20 движется по перекрестку, является правым поворотом, и путь p1 первого другого транспортного средства v1 также является правым поворотом. Соответственно, первое другое транспортное средство v1 не препятствует движению рассматриваемого транспортного средства 20.
[0047]
Когда путь p1 первого другого транспортного средства v1 не препятствует движению рассматриваемого транспортного средства 20, блок 53 прогнозирования остановки получает информацию об объекте, находящемся впереди на пути p1, где первое другое транспортное средство v1 проезжает перекресток из информация 54 об окружающем объекте, полученной блоком 42 управления информацией о другом транспортном средстве/окружающей среде на основе пути p1 первого другого транспортного средства v1, прогнозируемого блоком 41 прогнозирования пути другого транспортного средства.
Блок 53 прогнозирования остановки оценивает состояние точки впереди на пути p1, где первое другое транспортное средство v1 проезжает перекресток, на основе информации, полученной из информации 54 об окружающем объекте. Блок 53 прогнозирования остановки оценивает, остановится ли первое другое транспортное средство v1 и положение остановки первого другого транспортного средства v1, на основе состояния точки впереди на пути p1.
[0048]
Когда есть препятствие (объект) на пути p1 первого другого транспортного средства v1, блок 53 прогнозирования остановки может прогнозировать положение остановки первого другого транспортного средства v1, например, на основе информации 54 об окружающем объекте.
Например, как показано на фиг. 2, препятствием на пути p1 первого другого транспортного средства v1 может быть другое транспортное средство o1, движущееся по пути 23, пересекающемуся с путем p1, где первое другое транспортное средство v1 поворачивает направо.
Например, как показано на фиг. 4, препятствием на пути p1 первого другого транспортного средства v1 может быть пешеход o2 на пути p1 первого другого транспортного средства v1.
[0049]
Препятствием на пути p1 первого другого транспортного средства v1 может быть предшествующее транспортное средство впереди первого другого транспортного средства v1, или затор впереди на пути p1 первого другого транспортного средства v1.
Например, в сцене вождения по фиг. 5, присутствует затор впереди на пути p1 первого другого транспортного средства v1, и присутствует остановившееся предшествующее транспортное средство o3. Следовательно, блок 53 прогнозирования остановки прогнозирует, что первое другое транспортное средство v1 остановится в положения перед перекрестком. Даже в этом случае первое другое транспортное средство v1 не препятствует маршруту p0 рассматриваемого транспортного средства 20, которое поворачивает направо.
[0050]
В сцене вождения по фиг. 6, первый маршрут 21, по которому движется рассматриваемое транспортное средство 20, и второй маршрут 22, по которому движется первое другое транспортное средство v1, пересекаются на перекрестке. Впереди на пути p1 первого другого транспортного средства v1 затор, и предшествующее транспортное средство o3 остановлено, так что первое другое транспортное средство v1 должно остановиться перед перекрестком. Следовательно, первое другое транспортное средство v1 не препятствует движению рассматриваемого транспортного средства 20, которое движется прямо вперед. Даже в этом случае блок 53 прогнозирования остановки оценивает, что предшествующее транспортное средство впереди первого другого транспортного средства v1 и затор впереди на пути p1 первого другого транспортного средства v1 являются препятствиями на пути p1 первого другого транспортного средства v1, и прогнозирует положение перед перекрестком как положение остановки первого другого транспортного средства v1.
[0051]
Даже в сцене вождения по фиг. 7, первый маршрут 21, по которому движется рассматриваемое транспортное средство 20, и второй маршрут 22, по которому движется первое другое транспортное средство v1, пересекаются на перекрестке. Будущий запланированный маршрут p0, по которому рассматриваемое транспортное средство 20 движется по перекрестку, является левым поворотом, а путь p1 первого другого транспортного средства v1 является поворотом направо. Соответственно, первое другое транспортное средство v1 не препятствует движению рассматриваемого транспортного средства 20.
Путь p1, по которому первое другое транспортное средство v1 поворачивает направо на перекрестке, пересекается с путем 23, по которому встречное транспортное средство o1 первого другого транспортного средства v1 движется прямо через перекресток. Следовательно, блок 53 прогнозирования остановки оценивает, что встречное транспортное средство o1 является препятствием на пути p1 первого другого транспортного средства v1, и прогнозирует, что положение, в котором первое другое транспортное средство v1 ожидает на перекрестке, пока встречное транспортное средство o1 не пройдет через него, является положением остановки первого другого транспортного средства v1.
[0052]
Перекресток, на котором блок 32 определения поведения при вождении оценивает, продвигаться ли вперед рассматриваемому транспортному средству 20, не ограничен пересечением. В сцене вождения по фиг. 8, блок 32 определения поведения при вождении оценивает, следует ли продвигать рассматриваемое транспортное средство 20 на Т-образном перекрестке, где пересекаются первый маршрут 21, по которому перемещается рассматриваемое транспортное средство 20, и второй маршрут 22, по которому движется первое другое транспортное средство v1.
Первое другое транспортное средство v1 приближается с правой стороны рассматриваемого транспортного средства 20 и собирается повернуть налево на дорогу, по которой движется рассматриваемое транспортное средство 20, а рассматриваемое транспортное средство 20 собирается продвинуться посредством поворота налево в направлении, противоположном направлению, в котором приближается первое другое транспортное средство v1. Даже в этом случае первое другое транспортное средство v1 не препятствует маршруту p0 рассматриваемого транспортного средства 20, которое поворачивает налево.
[0053]
Когда ширина дороги, по которой движется рассматриваемое транспортное средство 20 (т. е. дорога, по которой планируется выезд первого другого транспортного средства v1), является узкой, и поэтому рассматриваемому транспортному средству 20 и первому другому транспортному средству v1 трудно проехать друг друга, первое другое транспортное средство v1 не может выехать на дорогу, по которой движется рассматриваемое транспортное средство 20. Таким образом, блок 53 прогнозирования остановки оценивает, что рассматриваемое транспортное средство 20 является препятствием на пути p1 первого другого транспортного средства v1, и прогнозирует, что положение перед Т-образным перекрестком является положением остановки первого другого транспортного средства v1.
[0054]
Ссылка будет сделана на фиг. 3. Блок 43 вычисления промежутка вычисляет минимальное расстояние d1 первого промежутка, который является кандидатом на промежуток, где второе другое транспортное средство v2 считается проскальзывающим мимо остановленного первого другого транспортного средства v1, на основе информации о крае дороги, полученной посредством блок 40 управления информацией о перекрестках и информации 55 о конце другого транспортного средства, полученной блоком 42 управления информацией о другом транспортном средстве/окружающем пространстве.
Например, в сценах движения по фиг. 2 и фиг. 4-7 (то есть сцена вождения, где первое другое транспортное средство v1 поворачивает направо или едет прямо вперед), блок 43 вычисления промежутка может вычислить в качестве минимального расстояния d1 минимальное расстояние промежутка между концевой частью кузова транспортного средства первого другого транспортного средства v1 и краем дороги на левой стороне полосы движения первого другого транспортного средства v1.
[0055]
Кроме того, например, в сцене вождения на фиг. 8 (т.е. сцена вождения, где первое другое транспортное средство v1 поворачивает налево), блок 43 вычисления промежутка может вычислить в качестве минимального расстояния d1 минимальное расстояние промежутка между концевой частью кузова транспортного средства первого другого транспортного средства v1 и краем дороги с правой стороны полосы движения первого другого транспортного средства v1.
Кроме того, в сцене вождения, показанной на фиг. 9, где первое другое транспортное средство v1 поворачивает налево, линия 25 полосы движения (желтая линия в Японии), запрещающая смену полосы движения, обеспечена между полосой движения первого другого транспортного средства v1 и полосой встречного движения. В таком случае считается, что второе другое транспортное средство v2 маловероятно пересечет линию 25 полосы движения и проскользнет мимо первого другого транспортного средства v1.
Следовательно, блок 43 вычисления промежутка может рассматривать линию 25 полосы движения как край дороги и вычислять в качестве минимального расстояния d1 минимальное расстояние промежутка между концевой частью кузова транспортного средства первого другого транспортного средства v1 и линией 25 полосы движения с правой стороны полосы движения первого другого транспортного средства v1.
[0056]
Блок 43 вычисления промежутка может определять в качестве минимального расстояния d1 первого промежутка минимальное расстояние промежутка между кузовом транспортного средства первого другого транспортного средства v1 и окружающим объектом вокруг первого другого транспортного средства v1.
В сцене вождения по фиг. 10, рассматриваемое транспортное средство 20, движущееся по запланированному маршруту p0, пытается повернуть направо на перекрестке и выехать на полосу 26, и прогнозируется, что первое другое транспортное средство v1, движущееся по встречной полосе, продолжит путь p1, повернет налево на перекрестке и въедет на полосу 27, смежную полосе 26. Кроме того, есть препятствие (пешеход o2) на пути p1 первого другого транспортного средства v1, так что прогнозируется, что первое другое транспортное средство v1 остановится перед пешеходным переходом.
[0057]
С другой стороны, на перекрестке есть другое транспортное средство s1 вокруг первого другого транспортного средства v1 (с правой стороны от первого другого транспортного средства v1). Путь, по которому другое транспортное средство s1 поворачивает направо на перекрестке, пересекается с путем, по которому транспортное средство, следующее за рассматриваемым транспортным средством 20, движется прямо через перекресток, а следующее транспортное средство позади рассматриваемого транспортного средства 20 является препятствием на пути другого транспортного средства s1. Следовательно, другое транспортное средство s1 не может двигаться и останавливается на перекрестке.
В этом случае второе другое транспортное средство v2 может проскользнуть через промежуток между первым другим транспортным средством v1 и другим транспортным средством s1.
[0058]
Таким образом, блок 43 вычисления промежутка может определять в качестве минимального расстояния d1 первого промежутка минимальное расстояние промежутка между кузовом транспортного средства первого другого транспортного средства v1 и другим транспортным средством s1.
Определение минимального расстояния промежутка между кузовом транспортного средства первого другого транспортного средства v1 и другим транспортным средством s1 не ограничивается случаем, когда другое транспортное средство s1 остановлено. Блок 43 вычисления промежутка может определять в качестве минимального расстояния d1 минимальное расстояние промежутка между кузовом транспортного средства первого другого транспортного средства v1 и другим транспортным средством s1, даже когда другое транспортное средство s1 замедляется из-за препятствия на пути другого транспортного средства s1.
Препятствием на пути другого транспортного средства s1 может быть, например, предшествующее транспортное средство впереди другого транспортного средства s1, транспортный затор впереди на пути другого транспортного средства s1, другое транспортное средство, движущееся по пути, пересекающемуся с путем другого транспортного средства s1 или пешеход, идущий по маршруту другого транспортного средства s1.
[0059]
Далее будет дано описание способа вычисления минимального расстояния d1 промежутка между концевой частью кузова транспортного средства первого другого транспортного средства v1 и краем дороги полосы движения первого другого транспортного средства v1. Ссылка будет сделана на фиг. 11А. Сначала блок 43 вычисления промежутка выбирает точку p1 из множества точек p1-p7 на внешней периферийной поверхности кузова транспортного средства первого другого транспортного средства v1, включенных в информацию, обнаруженную блоком 30 распознавания объектов. Блок 43 вычисления промежутка определяет каждую комбинацию выбранной точки p1 и множества точек p11-p16 на крае 28 дорогии вычисляет каждое расстояние между точками в определенных комбинациях.
[0060]
Ссылка будет сделана на фиг. 11B. Затем блок 43 вычисления промежутка выбирает точку p2 из множества точек p1-p7. Блок 43 вычисления промежутка определяет каждую комбинацию выбранной точки p2 и множества точек p11-p16 и вычисляет каждое расстояние между точками в определенных комбинация.
В дальнейшем аналогично блок 43 вычисления промежутка также определяет каждую комбинацию из множества точек p3-p7 на внешней периферии кузова транспортного средства первого другого транспортного средства v1 и множества точек p11-p16 на крае 28 дороги, и вычисляет каждое расстояние между точками в комбинациях.
Блок 43 вычисления промежутка выбирает наименьшее расстояние среди вычисленных расстояний в качестве минимального расстояния d1 первого промежутка.
[0061]
Далее будет дано описание способа вычисления минимального расстояния d1 промежутка между концевой частью кузова транспортного средства первого другого транспортного средства v1 и окружающим объектом s1 вокруг первого другого транспортного средства v1. Ссылка будет сделана на фиг. 11C. Сначала блок 43 вычисления промежутка выбирает точку p1 из множества точек p1-p6 на внешней периферийной поверхности кузова транспортного средства первого другого транспортного средства v1, включенных в информацию, обнаруженную блоком 30 распознавания объектов. Блок 43 вычисления промежутка определяет каждую комбинацию выбранной точки p1 и множества точек p21-p26 на окружающем объекте s1 и вычисляет каждое расстояние между точками в определенных комбинациях.
[0062]
Ссылка будет сделана на фиг. 11D. Затем блок 43 вычисления промежутка выбирает точку p2 из множества точек p1-p6. Блок 43 вычисления промежутка определяет каждую комбинацию выбранной точки p2 и множества точек p21-p26 и вычисляет каждое расстояние между точками в определенных комбинациях.
В дальнейшем аналогично блок 43 вычисления промежутка также определяет каждую комбинацию из множества точек p3-p6 на внешней периферии кузова транспортного средства первого другого транспортного средства v1 и множества точек p21-p26 на окружающем объекте s1, и вычисляет каждое расстояние между точками в комбинациях.
Блок 43 вычисления промежутка выбирает наименьшее расстояние среди вычисленных расстояний как минимальное расстояние d1 первого промежутка.
[0063]
Ссылка будет сделана на фиг. 3. Блок 43 вычисления промежутка выводит вычисленное минимальное расстояние d1 в блок 44 прогнозирования проскальзывания. Блок 44 прогнозирования проскальзывания прогнозирует, может ли второе другое транспортное средство v2 проскользнуть через первый промежуток позади первого другого транспортного средства v1 на основе информации 50 о приоритете рассматриваемого транспортного средства, результата прогнозирования блоком 53 прогнозирования остановки, и минимального расстояния d1 первого промежутка, вычисленного блоком 43 вычисления промежутка.
[0064]
Блок 44 прогнозирования проскальзывания оценивает, выше ли приоритет для рассматриваемого транспортного средства, чтобы двигаться по маршруту p0 для проезда через перекресток, чем приоритет движения по полосе движения первого другого транспортного средства v1 (т. е. полоса движения второго другого транспортного средства v2, которое является следующим транспортным средством за первым другим транспортным средством v1) на основе информации 50 о приоритете рассматриваемого транспортного средства.
Когда приоритет для рассматриваемого транспортного средства 20 при движении по маршруту p0 для проезда через перекресток выше, чем приоритет на движение по полосе движения первого другого транспортного средства v1, рассматриваемое транспортное средство 20 может проезжать перекресток с приоритетом над вторым другим транспортным средством v2. Соответственно, в этом случае блок 44 прогнозирования проскальзывания не прогнозирует, может или нет второе другое транспортное средство v2 проскользнуть через первый промежуток.
[0065]
С другой стороны, когда приоритет для рассматриваемого транспортного средства 20 при движении по маршруту p0 для проезда через перекресток не выше, чем приоритет движения по полосе движения первого другого транспортного средства v1 (т. е. когда приоритет для рассматриваемого транспортного средства 20 для движения по маршруту p0 для проезда через перекресток равен или меньше приоритета движения по полосе движения первого другого транспортного средства v1), блок 44 прогнозирования проскальзывания прогнозирует, сможет ли второе другое транспортное средство v2 проскользнуть через первый промежуток.
Затем блок 44 прогнозирования проскальзывания оценивает, действительно ли минимальное расстояние d1 первого промежутка, вычисленное блоком 43 вычисления промежутка, равно или меньше заранее определенного порогового значения. Пороговое значение устанавливается меньшим, чем, например, ширина, позволяющая мотоциклу проехать через промежуток.
[0066]
Когда минимальное расстояние d1 первого промежутка равно или меньше предварительно определенного порогового значения, блок 44 прогнозирования проскальзывания прогнозирует, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток. Когда прогнозируется, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток, блок 44 прогнозирования проскальзывания прогнозирует, что у транспортного средства, следующего за первым другим транспортным средством v1, нет возможности проскользнуть мимо первого другого транспортного средства v1.
Когда минимальное расстояние d1 первого промежутка больше, чем заданное пороговое значение, блок 44 прогнозирования проскальзывания оценивает, сможет ли блок 30 распознавания объектов обнаружить второе другое транспортное средство v2 на основе информации 54 об окружающем объекте.
[0067]
Когда блок 30 распознавания объектов не может обнаружить второе другое транспортное средство v2, блок 44 прогнозирования проскальзывания прогнозирует, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо первого другого транспортного средства v1. Это связано с тем, что второе другое транспортное средство v2 может находиться в слепой зоне первого другого транспортного средства v1 или окружающего объекта вокруг первого другого транспортного средства v1.
С другой стороны, когда блок 30 распознавания объектов обнаруживает второе другое транспортное средство v2, блок 44 прогнозирования проскальзывания измеряет ширину w1 транспортного средства второго другого транспортного средства v2.
[0068]
Например, блок 44 прогнозирования проскальзывания может измерять ширину w1 транспортного средства второго другого транспортного средства v2 на основе информации о размере второго другого транспортного средства v2, распознанного блоком 30 распознавания объектов. Ширина w1 транспортного средства может быть вычислена путем добавления заранее определенного запаса к ширине второго другого транспортного средства v2, измеренной на основе информации, распознанной блоком 30 распознавания объектов.
Дополнительно, например, блок 44 прогнозирования проскальзывания может идентифицировать тип второго другого транспортного средства v2 путем сопоставления с образцом, используя изображение всего или части кузова транспортного средства второго другого транспортного средства v2. В этом случае, например, блок 44 прогнозирования проскальзывания может получить информацию о ширине транспортного средства для идентифицированного типа транспортного средства путем сопоставления данных транспортного средства, сохраненных заранее, включая информацию о ширине транспортного средства для каждого типа транспортного средства или данные транспортного средства, которые могут быть получены блоком 5 связи с идентифицированным типом транспортного средства.
[0069]
Блок 44 прогнозирования проскальзывания оценивает, меньше ли ширина w1 транспортного средства второго другого транспортного средства v2, чем минимальное расстояние d1 первого промежутка. Когда ширина w1 транспортного средства второго другого транспортного средства v2 больше, чем минимальное расстояние d1 первого промежутка, блок 44 прогнозирования проскальзывания прогнозирует, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток. Когда прогнозируется, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток, блок 44 прогнозирования проскальзывания прогнозирует, что у транспортного средства, следующего за первым другим транспортным средством v1, нет возможности проскользнуть мимо первого другого транспортного средства v1.
[0070]
С другой стороны, когда ширина w1 транспортного средства второго другого транспортного средства v2 равна или меньше минимального расстояния d1 первого промежутка, блок 44 прогнозирования проскальзывания оценивает, остановится ли второе другое транспортное средство v2. Когда ширина w1 транспортного средства второго другого транспортного средства v2 равна или меньше минимального расстояния d1 первого промежутка, а второе другое транспортное средство v2 не останавливается, блок 44 прогнозирования проскальзывания прогнозирует, что второе другое транспортное средство v2 может проскользнуть через первый промежуток.
Когда прогнозируется, что второе другое транспортное средство v2 может проскользнуть через первый промежуток, блок 44 прогнозирования проскальзывания прогнозирует, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо первого другого транспортного средства v1.
[0071]
Затем, как показано на фиг. 12, блок 44 прогнозирования проскальзывания вычисляет минимальное расстояние d2 промежутка (в дальнейшем называемого «вторым промежутком») между кузовом транспортного средства второго другого транспортного средства v2 и краем дороги полосы движения второго другого транспортного средства v2 (или между кузовом транспортного средства второго другого транспортного средства v2 и окружающим объектом вокруг второго другого транспортного средства v2). Способ вычисления минимального расстояния d2 второго промежутка такой же, как способ вычисления минимального расстояния d1 первого промежутка, описанный со ссылкой на фиг. 11A - 11D. Когда часть кузова транспортного средства второго другого транспортного средства v2 скрыта первым другим транспортным средством v1 или окружающим объектом вокруг первого другого транспортного средства v1, модель транспортного средства (виртуальный объект, по существу равный по размеру в направлениях вперед - назад и слева - направо к указанному типу транспортного средства) типа транспортного средства, идентифицированного сопоставлением с образцом изображения второго другого транспортного средства v2, могут быть виртуально размещены в данных карты для расчета промежутка между моделью транспортного средства и краем дороги или окружающим объектом.
[0072]
Когда минимальное расстояние d2 второго промежутка равно или меньше предварительно определенного порогового значения, меньшего, чем, например, размер мотоцикла в ширину, блок 44 прогнозирования проскальзывания прогнозирует, что нет возможности для третьего другого транспортного средства v3, которое является следующим транспортным средством за вторым другим транспортным средством v2, проскользнуть через второй промежуток. Когда прогнозируется, что у третьего другого транспортного средства v3 нет возможности проскользнуть через второй промежуток, блок 44 прогнозирования проскальзывания прогнозирует, что транспортное средство, идущее за первым другим транспортным средством v1, не может проскользнуть мимо первого другого транспортного средства v1.
[0073]
Когда минимальное расстояние d2 второго промежутка больше, чем заданное пороговое значение, блок 44 прогнозирования проскальзывания оценивает, сможет ли блок 30 распознавания объектов обнаружить третье другое транспортное средство v3. Когда блок 30 распознавания объектов не может обнаружить третье другое транспортное средство v3, блок 44 прогнозирования проскальзывания прогнозирует, что третье другое транспортное средство v3 может проскользнуть через первый промежуток и второй промежуток. Когда третье другое транспортное средство v3 может проскользнуть через первый промежуток и второй промежуток, блок 44 прогнозирования проскальзывания прогнозирует, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо первого другого транспортного средства v1.
[0074]
Когда блок 30 распознавания объектов обнаруживает третье другое транспортное средство v3, блок 44 прогнозирования проскальзывания измеряет ширину w2 транспортного средства третьего другого транспортного средства v3. Способ измерения ширины w2 транспортного средства может быть таким же, как способ измерения ширины w1 транспортного средства второго другого транспортного средства v2.
Блок 44 прогнозирования проскальзывания выбирает меньшее из минимального расстояния d1 первого промежутка и минимального расстояния d2 второго промежутка в качестве минимального интересующего расстояния D.
[0075]
Блок 44 прогнозирования проскальзывания оценивает, является ли ширина w2 транспортного средства третьего другого транспортного средства v3 меньше, чем минимальное интересующее расстояние D. Когда ширина w2 транспортного средства третьего другого транспортного средства v3 больше, чем минимальное интересующее расстояние D, блок 44 прогнозирования проскальзывания прогнозирует, что у третьего другого транспортного средства v3 нет возможности проскользнуть через первый промежуток и второй промежуток. Когда прогнозируется, что у третьего другого транспортного средства v3 нет возможности проскользнуть через первый промежуток и второй промежуток, блок 44 прогнозирования проскальзывания прогнозирует, что у транспортного средства, следующего за первым другим транспортным средством v1, нет возможности проскользнуть мимо первого другого транспортного средства v1.
[0076]
С другой стороны, когда ширина w2 транспортного средства третьего другого транспортного средства v3 равна или короче, чем минимальное интересующее расстояние D, блок 44 прогнозирования проскальзывания оценивает, остановлено ли третье другое транспортное средство v3. Когда ширина w2 транспортного средства третьего другого транспортного средства v3 равна или короче, чем минимальное интересующее расстояние D, а третье другое транспортное средство v3 не остановлено, блок 44 прогнозирования проскальзывания прогнозирует, что третье другое транспортное средство v3 может проскользнуть первый промежуток и второй промежуток. Когда прогнозируется, что третье другое транспортное средство v3 может проскользнуть через первый промежуток и второй промежуток, блок 44 прогнозирования проскальзывания прогнозирует, что транспортное средство, следующее за первым другим транспортным средством v1, может проскользнуть мимо первого другого транспортного средства v1.
[0077]
В дальнейшем аналогично блок 44 прогнозирования проскальзывания повторяет ту же обработку в отношении каждого транспортного средства, следующего за третьим другим транспортным средством v3, до тех пор, пока не будет спрогнозировано, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо первого другого транспортного средства v1, или не будет спрогнозировано, что нет такой возможности.
Когда прогнозируется, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо первого другого транспортного средства v1, блок 44 прогнозирования проскальзывания решает остановить рассматриваемое транспортное средство 20 перед продвижением рассматриваемого транспортного средства 20 к маршруту p0 для проезда через пересечение.
Когда прогнозируется, что у транспортного средства, следующего за первым другим транспортным средством v1, нет возможности проскользнуть мимо первого другого транспортного средства v1, блок 44 прогнозирования проскальзывания решает продвинуть рассматриваемое транспортное средство 20 к маршруту p0, чтобы проехать через перекресток.
[0078]
Ссылка будет сделана на фиг. 3. Блок 44 прогнозирования проскальзывания выводит результат решения в блок 33 формирования траектории.
Блок 33 формирования траектории формирует траекторию движения для движения рассматриваемого транспортного средства на основе информации об окружающей среде, выводимой из блока 2 датчиков, маршрута движения, установленного навигационным устройством 6, и данных карты, хранящихся в базе 4 данных карт.
Блок 33 формирования траектории формирует траекторию движения таким образом, чтобы включать в себя профиль скорости для остановки рассматриваемого транспортного средства в положении остановки или замедления и прохождения положения остановки.
[0079]
Когда блок 44 прогнозирования проскальзывания определяет остановку рассматриваемого транспортного средства 20 перед продвижением рассматриваемого транспортного средства к маршруту p0 для проезда через перекресток, блок 33 формирования траектории движения формирует траекторию движения для остановки рассматриваемого транспортного средства 20 в положения для ожидание, пока транспортное средство позади первого другого транспортного средства v1 проскользнет мимо и обгонит первое другое транспортное средство v1, прежде чем продвигать рассматриваемое транспортное средство 20 к маршруту p0 для проезда через перекресток.
Устройство 9 управления движением управляет приводом 10 на основе траектории движения, формируемой блоком 33 формирования траектории, чтобы остановить транспортное средство 20 в положении ожидания, пока рассматриваемое транспортное средство позади первого другого транспортного средства v1 проскользнет и обгонит первое другое транспортное средство v1.
[0080]
Когда блок 44 прогнозирования проскальзывания определяет продвижение рассматриваемого транспортного средства 20 к маршруту p0 для проезда через перекресток, блок 33 формирования траектории формирует траекторию движения для продвижения рассматриваемого транспортного средства 20 к маршруту p0 для проезда через перекресток.
Устройство 9 управления движением управляет исполнительным механизмом 10 на основе траектории движения, формируемой блоком 33 формирования траектории, чтобы продвигать рассматриваемое транспортное средство 20 к маршруту p0 для проезда через перекресток.
[0081]
Отметим, что вместо автономного управления рассматриваемым транспортным средством 20 посредством устройства 9 управления движением блок 44 прогнозирования проскальзывания может выводить информацию руководства для подсказки приведения в движение рассматриваемого транспортного средства 20 из блока 7 вывода, чтобы способствовать управлению движением водителя.
Например, когда прогнозируется, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо и обогнать первое другое транспортное средство v1, блок 44 прогнозирования проскальзывания может выводить информацию руководства для уведомления о том, что транспортное средство, находящееся позади первого другого транспортного средства v1, может обгонять первое другое транспортное средство v1 и создавать помехи для рассматриваемого транспортного средства и предлагать остановить рассматриваемое транспортное средство 20 перед продвижением рассматриваемого транспортного средства 20 по маршруту p0 для проезда через перекресток от блока 7 вывода.
[0082]
Например, когда прогнозируется, что у транспортного средства, следующего за первым другим транспортным средством v1, нет возможности проскользнуть и обогнать первое другое транспортное средство v1, блок 44 прогнозирования проскальзывания может выводить информацию руководства для уведомления об отсутствии возможности для транспортного средства, идущего за первым другим транспортным средством v1, проскользнуть и обогнать первое другое транспортное средство v1, и выводит подсказку о продвижении рассматриваемого транспортного средства 20 к маршруту p0, чтобы проехать через перекресток, от блока 7 вывода.
[0083]
(Способ помощи при вождении)
Далее будет описан пример способа помощи при вождении согласно варианту осуществления изобретения со ссылкой на блок-схемы на фиг. 13A и 13B.
На этапе S1 блок 32 определения поведения при вождении получает информацию об объекте, касающуюся положения объекта вокруг рассматриваемого транспортного средства 20, на основе результата распознавания блоком 30 распознавания объектов, а также получает информацию карт на основе результат оценки собственного положения и базы 4 данных карт.
[0084]
На этапе S2 блок 32 оценивает поведения при вождении определяет, приближается ли рассматриваемое транспортное средство к перекрестку. Когда рассматриваемое транспортное средство приближается к перекрестку (этап S2: Y, ДА), обработка переходит к этапу S3. Когда рассматриваемое транспортное средство не приближается к перекрестку (этап S2: N, НЕТ), обработка возвращается к этапу S1.
На этапе S3 блок 44 прогнозирования проскальзывания оценивает, выше ли приоритет для рассматриваемого транспортного средства 20 при движении по маршруту p0 для проезда через перекресток, чем по маршруту для движения по полосе движения первого другого транспортного средства v1.
[0085]
Когда приоритет для рассматриваемого транспортного средства 20 для движения по маршруту p0 для проезда через перекресток выше, чем по маршруту для движения по полосе движения первого другого транспортного средства v1 (этап S3: Y, ДА), обработка переходит к этапу S14 на фиг. 13B. В этом случае блок 44 прогнозирования проскальзывания определяет продвижение рассматриваемого транспортного средства 20 к маршруту p0 для проезда через перекресток. В результате устройство 9 управления движением продвигает рассматриваемое транспортное средство 20 к маршруту p0, чтобы проехать через перекресток.
Когда приоритет для рассматриваемого транспортного средства 20 для движения по маршруту p0 для проезда через перекресток не выше, чем по маршруту для движения по полосе движения первого другого транспортного средства v1 (этап S3: N, НЕТ), обработка переходит к этапу S4.
[0086]
На этапе S4 блок 44 прогнозирования проскальзывания оценивает, было ли обнаружено первое другое транспортное средство v1, приближающееся к перекрестку. Когда обнаруживается первое другое транспортное средство v1, приближающееся к перекрестку (этап S4: Y, ДА), обработка переходит к этапу S5.
Когда первое другое транспортное средство v1, приближающееся к перекрестку, не обнаруживается (этап S4: N, НЕТ), обработка переходит к этапу S14 на фиг. 13B. В этом случае устройство 9 управления движением продвигает рассматриваемое транспортное средство 20 к маршруту p0, чтобы проехать через перекресток.
[0087]
На этапе S5 блок 53 прогнозирования остановки оценивает, будет ли путь p1 первого другого транспортного средства v1 препятствовать пути рассматриваемого транспортного средства 20. Когда путь p1 первого другого транспортного средства v1 препятствует движению рассматриваемого транспортного средства 20 (этап S5: Y, ДА) обработка возвращается к этапу S1 после ожидания прохождения первого другого транспортного средства v1 через перекресток. Когда путь p1 первого другого транспортного средства v1 не препятствует движению рассматриваемого транспортного средства 20 (этап S5: N, НЕТ), обработка переходит к этапу S6.
[0088]
На этапе S6 блок 53 прогнозирования остановки оценивает, есть ли препятствие на пути p1 первого другого транспортного средства v1. Когда есть препятствие на пути p1 первого другого транспортного средства v1 (этап S6: Y, ДА), обработка переходит к этапу S7. Когда на пути p1 первого другого транспортного средства v1 нет препятствия (этап S6: N, НЕТ), обработка возвращается к этапу S1 после ожидания, пока первое другое транспортное средство v1 проедет перекресток.
[0089]
На этапе S7 блок 53 прогнозирования остановки оценивает, остановится ли фактически первое другое транспортное средство v1 на основе истории движения первого другого транспортного средства v1. Когда первое другое транспортное средство v1 останавливается (этап S7: Y, ДА), обработка переходит к этапу S8. Когда первое другое транспортное средство V1 не останавливается (этап S7: N, НЕТ), обработка возвращается к этапу S1 после ожидания, пока первое другое транспортное средство v1 проедет перекресток.
[0090]
На этапе S8 блок 43 вычисления промежутка вычисляет минимальное расстояние d1 первого промежутка между концевой частью кузова транспортного средства первого другого транспортного средства v1 и окружающим объектом вокруг первого другого транспортного средства v1 (или первым промежутком между концом часть кузова транспортного средства первого другого транспортного средства v1 и краем дороги полосы движения первого другого транспортного средства v1). Затем блок 43 вычисления промежутка устанавливает вычисленное минимальное расстояние d1 как минимальное интересующее расстояние D.
На этапе S9 блок 44 прогнозирования проскальзывания оценивает, равно или меньше минимальное интересующее расстояние D предварительно определенному пороговому значению.
[0091]
Когда минимальное интересующее расстояние D равно или меньше предварительно определенного порогового значения (этап S9: Y, ДА), обработка переходит к этапу S13 на фиг. 13B. Когда минимальное интересующее расстояние D больше заданного порогового значения (этап S9: N, НЕТ), обработка переходит к этапу S10.
На этапе S10 блок 44 прогнозирования проскальзывания оценивает, удалось ли обнаружить второе другое транспортное средство v2, которое является следующим транспортным средством за первым другим транспортным средством v1. Когда второе другое транспортное средство v2 может быть обнаружено (этап S10: Y, ДА), обработка переходит к этапу S11 на фиг. 13B. Когда второе другое транспортное средство v2 не может быть обнаружено (этап S10: N, НЕТ), обработка переходит к этапу S16 на фиг. 13B.
[0092]
Ссылка будет сделана на фиг. 13B. На этапе S11 блок 44 прогнозирования проскальзывания устанавливает второе другое транспортное средство v2, которое является следующим транспортным средством за первым другим транспортным средством v1, в качестве интересующего транспортного средства V.
Кроме того, блок 44 прогнозирования проскальзывания измеряет ширину транспортного средства интересующего транспортного средства V (т. е. ширину w1 транспортного средства второго другого транспортного средства v2, и устанавливает интересующую ширину W транспортного средства.
На этапе S12 блок 44 прогнозирования проскальзывания оценивает, больше ли интересующая ширина W транспортного средства, чем минимальное интересующее расстояние D. Когда интересующая ширина W транспортного средства больше, чем минимальное интересующее расстояние D (этап S12: Y, ДА), обработка переходит к этапу S13. Когда интересующая ширина транспортного средства W равна или меньше минимального интересующего расстояния D (этап S12: N, НЕТ), обработка переходит к этапу S15.
[0093]
На этапе S13 блок 44 прогнозирования проскальзывания оценивает, что у транспортного средства, следующего за первым другим транспортным средством v1, нет возможности проскользнуть мимо первого другого транспортного средства v1, поскольку нет возможности для интересующего транспортного средства V проскользнуть через первый промежуток позади первого другого транспортного средства v1. Блок 44 прогнозирования проскальзывания определяет продвижение рассматриваемого транспортного средства 20 к маршруту p0 для проезда через перекресток.
На этапе S14 блок 33 формирования траектории формирует траекторию движения для продвижения рассматриваемого транспортного средства 20 к маршруту p0, чтобы пройти через перекресток. Устройство 9 управления движением управляет исполнительным механизмом 10 на основе траектории движения, формируемой блоком 33 формирования траектории, чтобы продвигать рассматриваемое транспортное средство 20 к маршруту p0 для проезда через перекресток. После этого обработка заканчивается.
[0094]
С другой стороны, на этапе S15 блок 44 прогнозирования проскальзывания оценивает, остановится ли интересующее транспортное средство V. Когда интересующее транспортное средство V останавливается (этап S15: Y, ДА), обработка переходит к этапу S17. Когда интересующее транспортное средство V не останавливается (этап S15: N, НЕТ), обработка переходит к этапу S16.
На этапе S16 блок 44 прогнозирования проскальзывания оценивает, что интересующее транспортное средство V может проскользнуть через первый промежуток позади первого другого транспортного средства v1. Другими словами, оценивается, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо первого другого транспортного средства v1. Определяется, что рассматриваемое транспортное средство 20 остановлено перед движением по маршруту p0 для проезда через перекресток.
[0095]
Следовательно, блок 33 формирования траектории формирует траекторию движения для остановки рассматриваемого транспортного средства 20 в положении ожидания, пока транспортное средство позади первого другого транспортного средства v1 проскользнет мимо и обгонит первое другое транспортное средство v1 перед продвижением рассматриваемого транспортного средства 20 к маршруту p0, чтобы проехать через перекресток.
Устройство 9 управления движением управляет приводом 10 на основе траектории движения, формируемой блоком 33 формирования траектории, чтобы остановить рассматриваемое транспортное средство 20 в положении ожидания, пока транспортное средство позади первого другого транспортного средства v1 проскользнет и обгонит первое другое транспортное средство v1. После этого обработка заканчивается.
[0096]
На этапе S17 блок 43 вычисления промежутка определяет минимальное расстояние промежутка между концевой частью кузова транспортного средства интересующего транспортного средства V и окружающим объектом вокруг интересующего транспортного средства V (или промежуток между концевой частью кузова транспортного средства интересующего транспортного средства V и краем дороги полосы движения интересующего транспортного средства V).
Например, когда интересующее транспортное средство V является вторым другим транспортным средством V2, блок 43 вычисления промежутка определяет минимальное расстояние d2 второго промежутка между концевой частью кузова транспортного средства второго другого транспортного средства v2 и окружающим объектом вокруг второго другого транспортного средства v2 (или второй промежуток между концевой частью кузова транспортного средства второго другого транспортного средства v2 и краем дороги полосы движения второго другого транспортного средства v2).
[0097]
На этапе S18 блок 44 прогнозирования проскальзывания оценивает, действительно ли минимальное расстояние, вычисленное на этапе S17, равно или меньше предварительно определенного порогового значения. Когда минимальное расстояние равно или меньше порогового значения (этап S18: Y, ДА), обработка переходит к этапу S13. Когда минимальное расстояние больше порогового значения (этап S18: N, НЕТ), обработка переходит к этапу S19.
На этапе S19 блок 44 прогнозирования проскальзывания оценивает, удалось ли обнаружить следующее транспортное средство за интересующим транспортным средством V. Например, когда интересующее транспортное средство V является вторым другим транспортным средством v2, следующее транспортное средство позади интересующего транспортного средства V является третьим другим транспортным средством v3.
Когда следующее транспортное средство позади интересующего транспортного средства V может быть обнаружено (этап S19: Y, ДА), обработка переходит к этапу S20. Когда следующее транспортное средство позади интересующего транспортного средства V не может быть обнаружено (этап S19: N, НЕТ), обработка переходит к этапу S16.
[0098]
На этапе S20 блок 44 прогнозирования проскальзывания измеряет ширину транспортного средства, следующего за транспортным средством, которое следует за интересующим транспортным средством V (ширина w2 транспортного средства, когда следующее транспортное средство за интересующим транспортным средством V является третьим другим транспортным средством v3).
На этапе S21 блок 44 прогнозирования проскальзывания оценивает, является ли минимальное расстояние, вычисленное на этапе S17, короче, чем минимальное интересующее расстояние D. Когда минимальное расстояние, вычисленное на этапе S17, короче, чем минимальное интересующее расстояние D (этап S21: Y, ДА), обработка переходит к этапу S22. Когда минимальное расстояние, вычисленное на этапе S17, равно или превышает минимальное интересующее расстояние D, этап S22 пропускается, и обработка переходит к этапу S23.
[0099]
На этапе S22 блок 44 прогнозирования проскальзывания устанавливает минимальное расстояние, вычисленное на этапе S17, как минимальное интересующее расстояние D. После этого обработка переходит к этапу S23.
На этапе S23 блок 44 прогнозирования проскальзывания устанавливает следующее транспортное средство позади интересующего транспортного средства V в качестве интересующего транспортного средства V и устанавливает ширину транспортного средства, следующего за транспортным средством, которое следует за интересующим транспортным средством V, в качестве ширины W интересующего транспортного средства.
Затем обработка возвращается к этапу S12. Таким образом, этапы с S12 по S23 повторяются, последовательно устанавливая транспортные средства в направлении первого другого транспортного средства v1 в качестве интересующего транспортного средства V, и, наконец, на этапе S16 прогнозируется, что транспортное средство позади первого другого транспортного средства v1 может проскользнуть мимо первого другого транспортного средства v1 или на этапе S13 прогнозируется, что такой возможности нет.
[0100]
(Эффекты вариантов осуществления изобретения)
(1) Блок 44 прогнозирования проскальзывания обнаруживает первое другое транспортное средство v1, въезжающее на перекресток на первом маршруте 21, где рассматриваемое транспортное средство 20 движется со второго маршрута 22, отличного от первого маршрута 21. Блок 53 прогнозирования остановки прогнозирует, остановится ли первое другое транспортное средство v1 на перекрестке, и прогнозирует положение остановки первого другого транспортного средства v1, когда прогнозируется, что первое другое транспортное средство v1 остановится на перекрестке. Блок 43 вычисления промежутка вычисляет минимальное расстояние d1 первого промежутка между кузовом транспортного средства первого другого транспортного средства v1 и окружающим объектом вокруг первого другого транспортного средства v1 или между кузовом транспортного средства первого другого транспортного средства v1 и краем дороги полосы движения первого другого транспортного средства v1, когда первое другое транспортное средство v1 останавливается в прогнозируемом положении остановки. Блок 44 прогнозирования проскальзывания прогнозирует согласно вычисленному минимальному расстоянию, может ли второе другое транспортное средство, которое является следующим транспортным средством за первым другим транспортным средством, проскользнуть через первый промежуток позади первого другого транспортного средства.
[0101]
В результате первое другое транспортное средство v1 обнаруживается на перекрестке, и можно оценить, есть ли промежуток рядом с первым другим транспортным средством v1, через который может проехать следующее транспортное средство за первым другим транспортным средством v1, согласно первому промежутку между первым другим транспортным средством v1 и окружающим объектом (или между первым другим транспортным средством v1 и краем дороги). Поэтому, например, даже в ситуации, когда следующее транспортное средство невидимо, можно прогнозировать, может ли транспортное средство позади первого другого транспортного средства v1 проскользнуть мимо первого другого транспортного средства v1, так что безопасность при движении по маршруту рассматриваемого транспортного средства можно подтвердить с более высокой точностью.
[0102]
Как описано выше, можно прогнозировать, может ли следующее транспортное средство за первым другим транспортным средством v1 проскользнуть мимо первого другого транспортного средства v1. Следовательно, когда у следующего транспортного средства нет возможности проскользнуть мимо первого другого транспортного средства v1, даже когда следующее транспортное средство позади первого другого транспортного средства v1 приближается или невидимо, рассматриваемое транспортное средство 20 может продвигаться на перекресток, не дожидаясь следующего транспортного средства. Это может сократить время, необходимое для достижения пункта назначения при автономном вождении. Таким образом, может быть предоставлена улучшенная технология создания траектории движения с улучшенным качеством траектории движения для автономного вождения рассматриваемого транспортного средства 20. Кроме того, можно избежать ненужной остановки рассматриваемого транспортного средства 20, чтобы дождаться следующего транспортного средства, что способствует повышению топливной эффективности рассматриваемого транспортного средства 20.
[0103]
(2) Когда приоритет для рассматриваемого транспортного средства 20 при движении по маршруту для проезда через перекресток ниже, чем приоритет для движения по полосе движения первого другого транспортного средства v1, блок 44 прогнозирования проскальзывания может прогнозировать, сможет ли второе другое транспортное средство v2 проскользнуть через первый промежуток позади первого другого транспортного средства v1.
Когда рассматриваемое транспортное средство 20 имеет более высокий приоритет для проезда перекрестка, рассматриваемое транспортное средство 20 может проезжать перекресток независимо от второго другого транспортного средства v2. В таком случае вычислительная нагрузка контроллера 8 может быть уменьшена путем исключения прогнозирования возможности того, что второе другое транспортное средство v2 проскользнет через первый промежуток позади первого другого транспортного средства v1.
[0104]
(3) Когда вычисленное минимальное расстояние d1 равно или меньше ранее определенного заданного порогового значения, блок 44 прогнозирования проскальзывания может прогнозировать, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства v1. В результате можно прогнозировать, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства v1.
[0105]
(4) Блок 44 прогнозирования проскальзывания определяет ширину w1 транспортного средства второго другого транспортного средства v2, и когда определенная ширина w1 транспортного средства второго другого транспортного средства v2 больше, чем вычисленное минимальное расстояние d1, блок 44 прогнозирования проскальзывания может прогнозировать, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства v1. В результате можно прогнозировать, что у второго другого транспортного средства v2 нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства v1.
[0106]
(5) Когда есть препятствие на пути первого другого транспортного средства v1, блок 53 прогнозирования остановки может прогнозировать, что первое другое транспортное средство v1 остановится на перекрестке. В результате можно оценить, остановится ли первое другое транспортное средство v1, и можно оценить, продолжит ли второе другое транспортное средство v2 проскальзывать мимо первого другого транспортного средства v1 или будет ждать первого другого транспортного средства v1, чтобы продолжит движение.
[0107]
(6) Препятствие на пути первого другого транспортного средства v1 может быть предшествующим транспортным средством впереди первого другого транспортного средства v1, затором впереди на пути первого другого транспортного средства v1, другим транспортным средством, движущимся по пути, пересекающемся с путем первого другого транспортного средства v1, рассматриваемым транспортным средством 20 или пешеходом на пути первого другого транспортного средства v1.
В результате можно оценить, остановится ли первое другое транспортное средство v1 из-за какого-либо из перечисленных препятствий, и можно оценить, продолжит ли второе другое транспортное средство v2 проскальзывать мимо первого другого транспортного средства v1 или будет ждать первого другого транспортного средства v1, чтобы продолжить движение.
[0108]
(7) Когда первый промежуток представляет собой промежуток между кузовом транспортного средства первого другого транспортного средства v1 и окружающим объектом, блок 43 вычисления промежутка может последовательно выбирать каждую из множества точек p1-p6 на внешней периферийной поверхности кузова транспортного средства первого другого транспортного средства v1, определить каждую комбинацию выбранной точки и множества точек p21 - p26 на внешней периферийной поверхности окружающего объекта и вычислить наименьшее расстояние среди расстояний между точками в определенных комбинациях как минимальное расстояние d1 первого промежутка.
Это позволяет ему надлежащим образом получить расстояние промежутка для прогнозирования, может ли следующее транспортное средство проскользнуть через него.
[0109]
(8) Когда первый промежуток представляет собой промежуток между кузовом транспортного средства первого другого транспортного средства v1 и краем дороги полосы движения первого другого транспортного средства v1, блок 43 вычисления промежутка может последовательно выбирать каждую из множества точек p1 до p7 на внешней периферийной поверхности кузова транспортного средства первого другого транспортного средства v1, определить каждую комбинацию выбранной точки и множества точек от p11 до p16 на краю дороги и вычислить наименьшее расстояние среди расстояний между точками в определенных комбинациях как минимальное расстояние d1 первого промежутка.
Это позволяет ему надлежащим образом получить расстояние промежутка для прогнозирования, может ли следующее транспортное средство проскользнуть через него.
[0110]
(9) Край дороги может быть стеной, бордюром, ограждением, столбом инженерной сети или дорожным знаком. Это позволяет ему прогнозировать, проскользнет ли следующее транспортное средство через промежуток между первым другим транспортным средством v1 и краем дороги, когда край дороги определяется любым из этих объектов, которые физически препятствуют движению следующего транспортного средства.
Кроме того, край дороги может быть полосой движения, запрещающей смену полосы движения. Это позволяет ему прогнозировать, проскользнет ли следующее транспортное средство через промежуток между первым другим транспортным средством v1 и линией полосы движения, когда пересечение линии полосы движения запрещено.
[0111]
(10) Блок 44 прогнозирования проскальзывания может определять ширину w2 транспортного средства третьего другого транспортного средства v3, которое является следующим за вторым другим транспортным средством v2 транспортным средством. Блок 43 вычисления промежутка может вычислять минимальное расстояние d2 второго промежутка между кузовом транспортного средства второго другого транспортного средства v2 и окружающим объектом вокруг второго другого транспортного средства v2 или между кузовом транспортного средства второго другого транспортного средства v2 и краем дороги полосы движения второго другого транспортного средства v2. Блок 44 прогнозирования проскальзывания может прогнозировать, что у третьего другого транспортного средства v3 нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства v1, когда ширина w2 транспортного средства третьего другого транспортного средства больше, чем меньшее расстояние минимального расстояния d1 первого промежутка и минимального расстояния d2 второго промежутка.
[0112]
В результате, когда третье другое транспортное средство v3, которое является следующим за ним транспортным средством, находится позади второго другого транспортного средства v2, можно оценить, есть ли промежуток, через который третье другое транспортное средство v3 может обогнать первое другое транспортное средство v1. Это позволяет ему прогнозировать, может ли третье другое транспортное средство v3 проскользнуть мимо первого другого транспортного средства v1, так что безопасность при движении по маршруту рассматриваемого транспортного средства может быть подтверждена с более высокой точностью.
[0113]
(11) Когда блок 44 прогнозирования проскальзывания прогнозирует, что у другого транспортного средства нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства v1, устройство 9 управления движением может продвинуть рассматриваемое транспортное средство 20 к запланированному маршруту, чтобы проехать на перекрестке.
Таким образом, рассматриваемое транспортное средство 20 может продвигаться вперед с обеспечением безопасности маршрута рассматриваемого транспортного средства 20.
[0114]
Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей, чтобы содействовать читателю в понимании изобретения и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя один или несколько вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0115]
1: Устройство помощи при вождении
2: Блок датчиков
3: Блок определения местоположения
4: База данных карт
5: Блок связи
6: Навигационное устройство
7: Блок вывода
8: Контроллер
9: Устройство управления перемещением
10: Привод
11: Процессор
12: Устройство хранения
30: Блок распознавания объектов
31: Блок самооценки
32: Блок определения поведения при вождении
33: Блок формирования траектории
40: Блок управления информацией о перекрестках
41: Блок прогнозирования пути другого транспортного средства
42: Блок управления окружающей информацией
43: Блок расчета промежутка
44: Блок прогнозирования
50: Информация о приоритете рассматриваемого транспортного средства
51: Информация о крае дороги
52: Блок прогнозирования пути
53: блок прогнозирования остановки
54: Информация об окружающем объекте
55: Информация о конце другого транспортного средства.
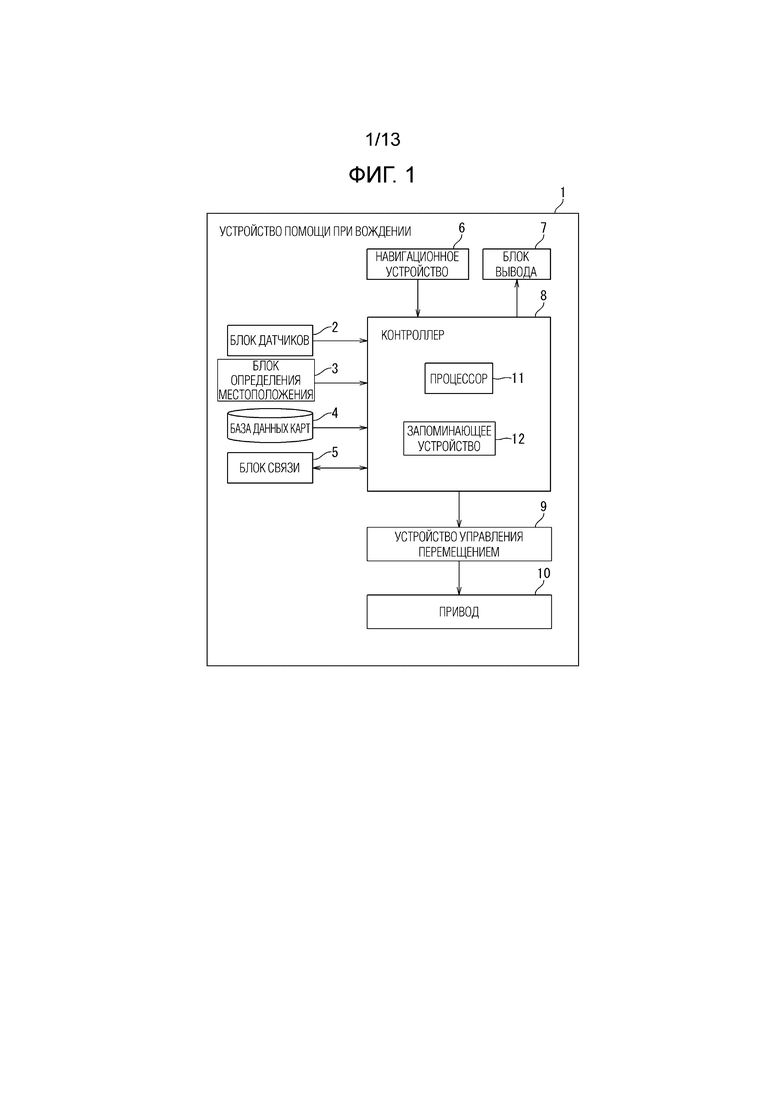
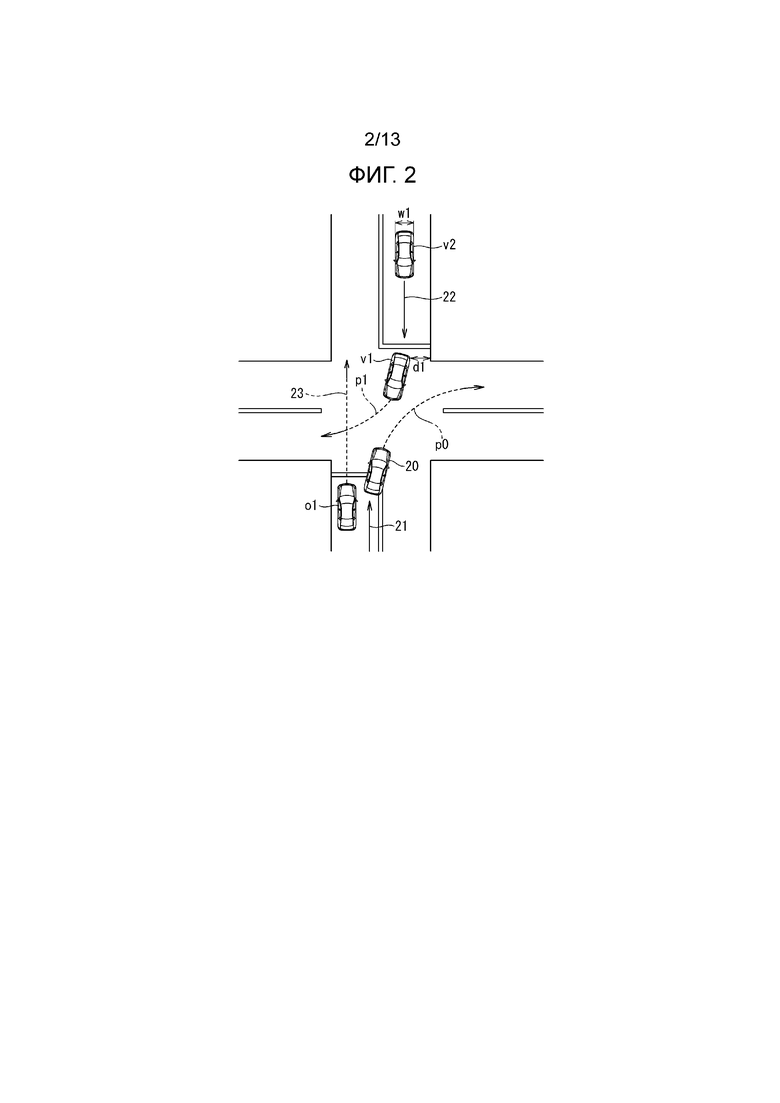
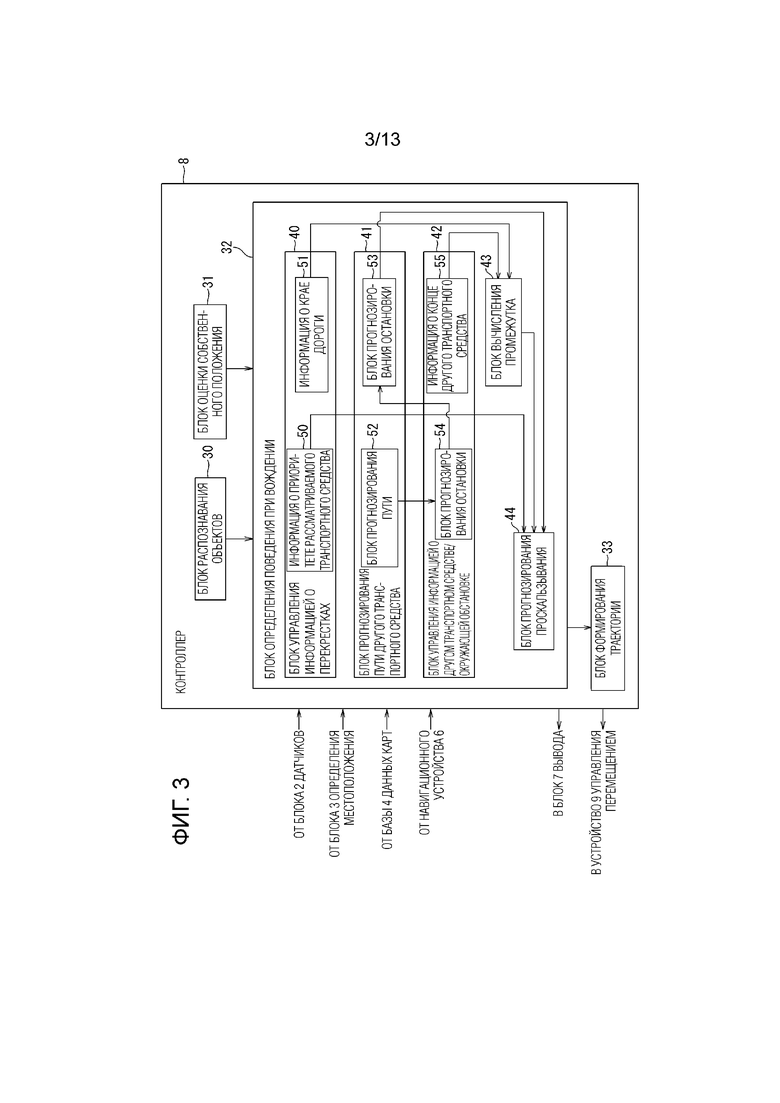
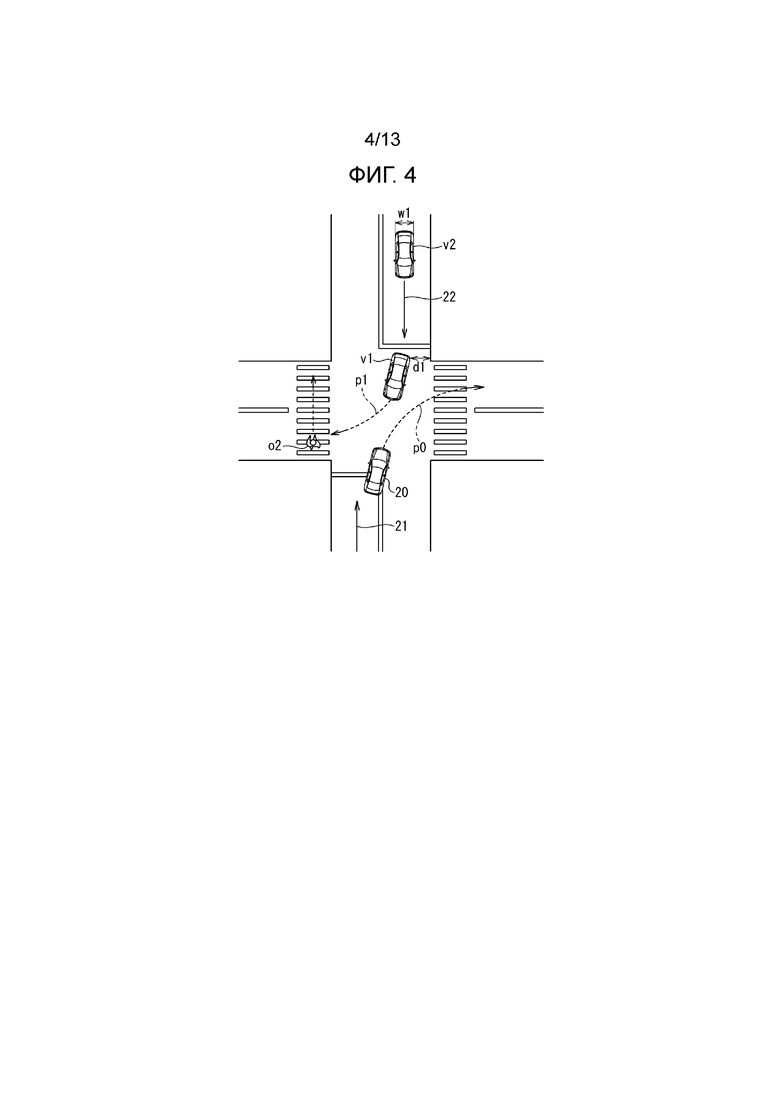
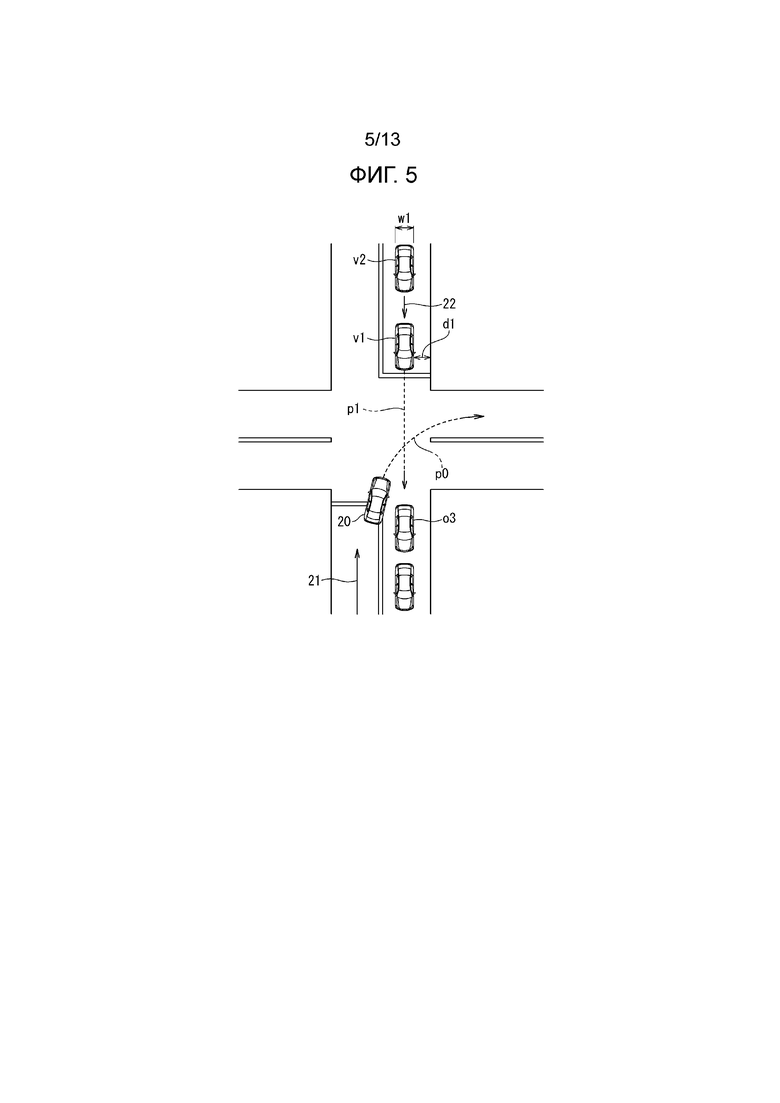
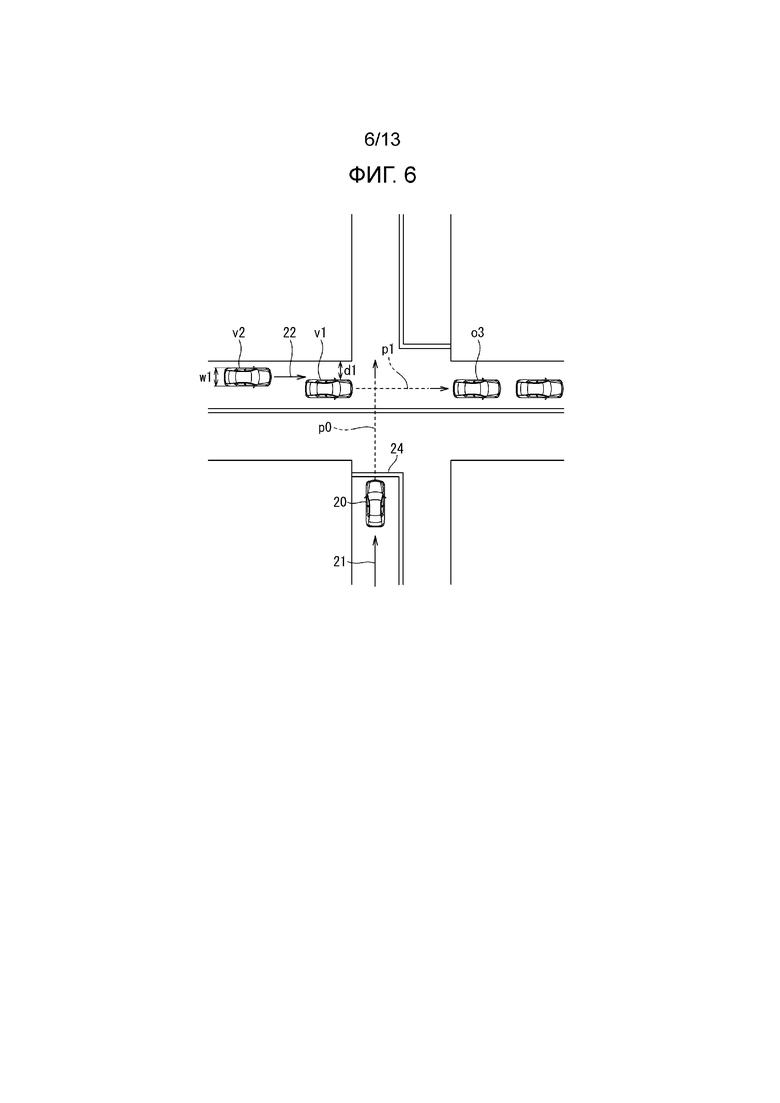
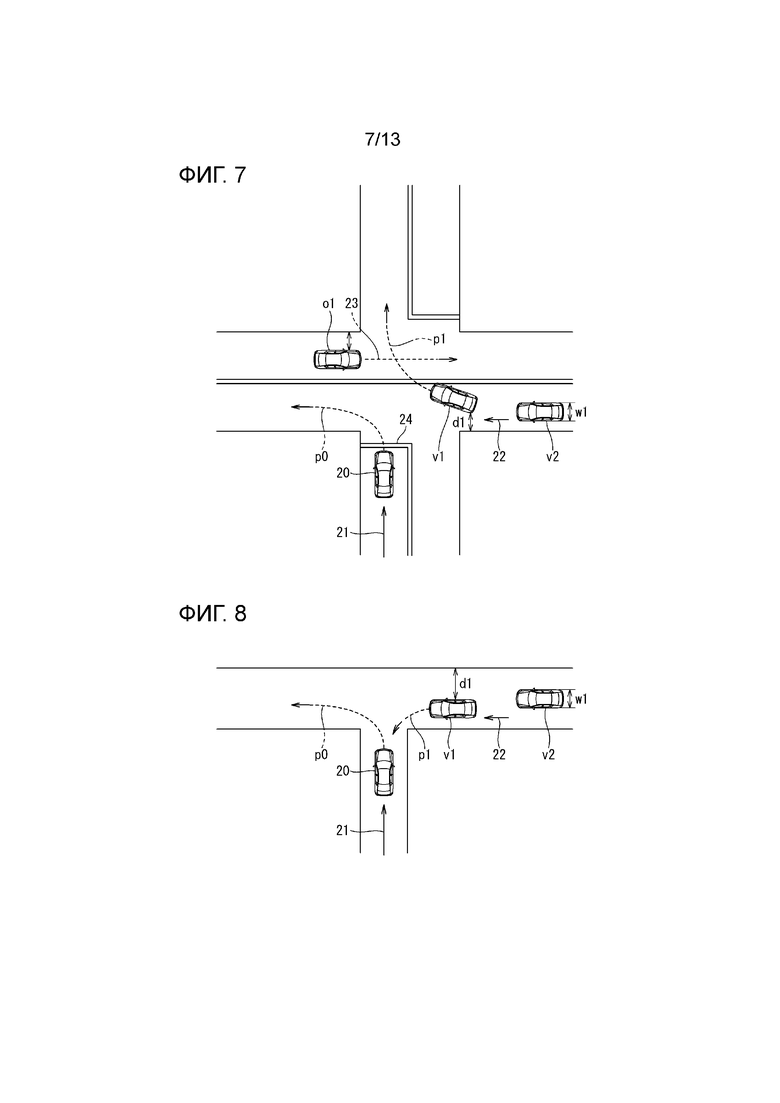
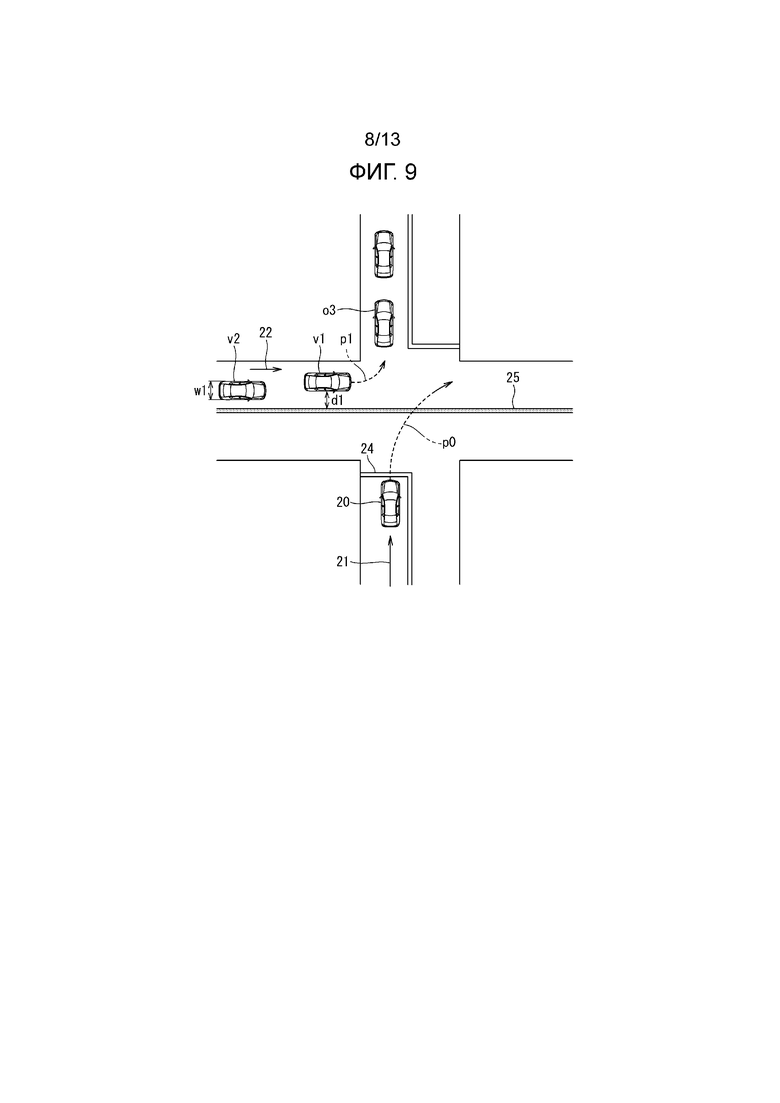
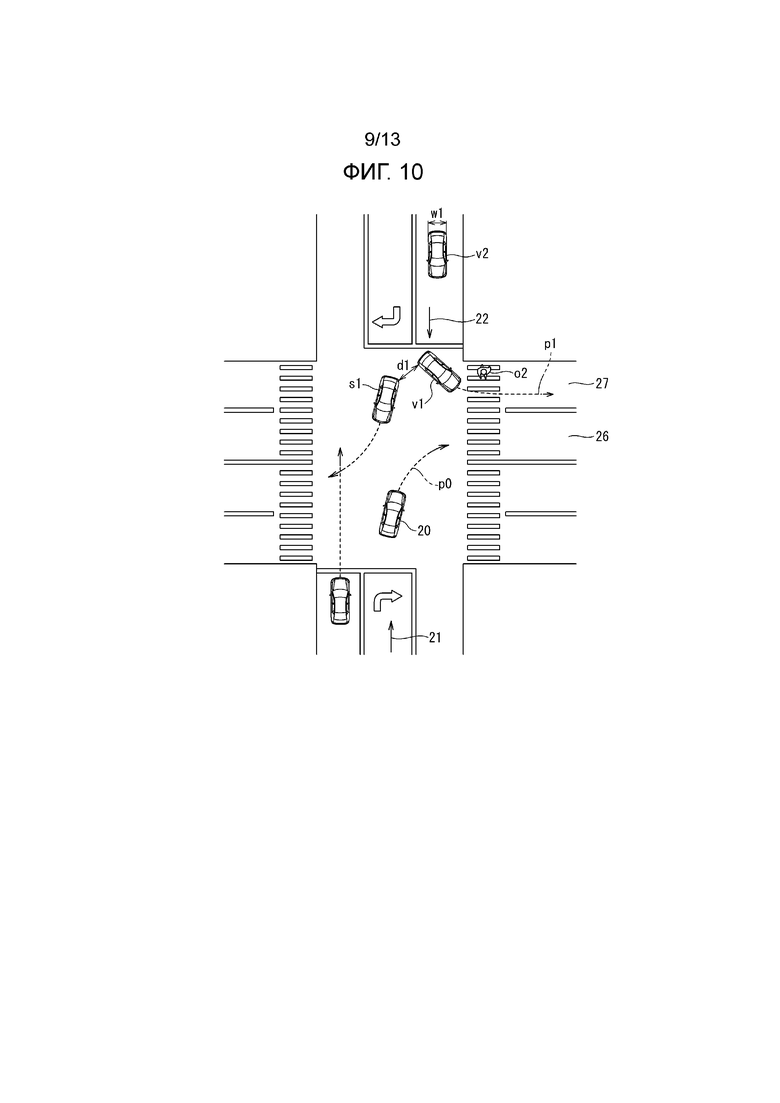
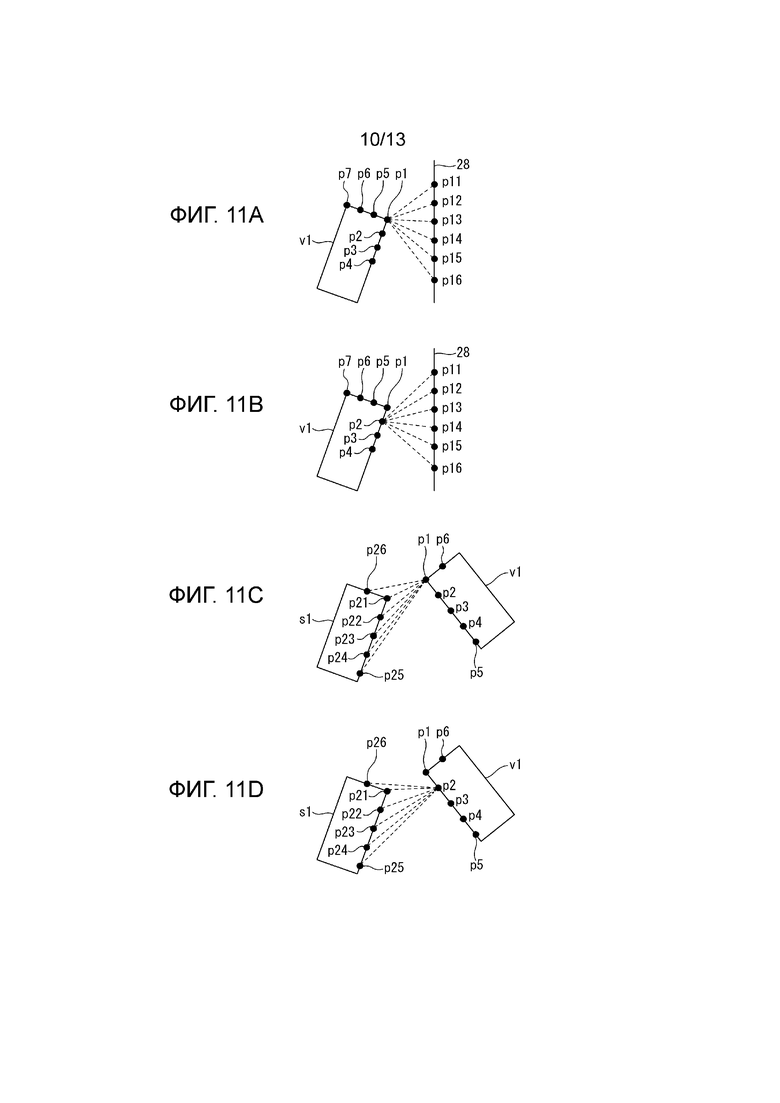
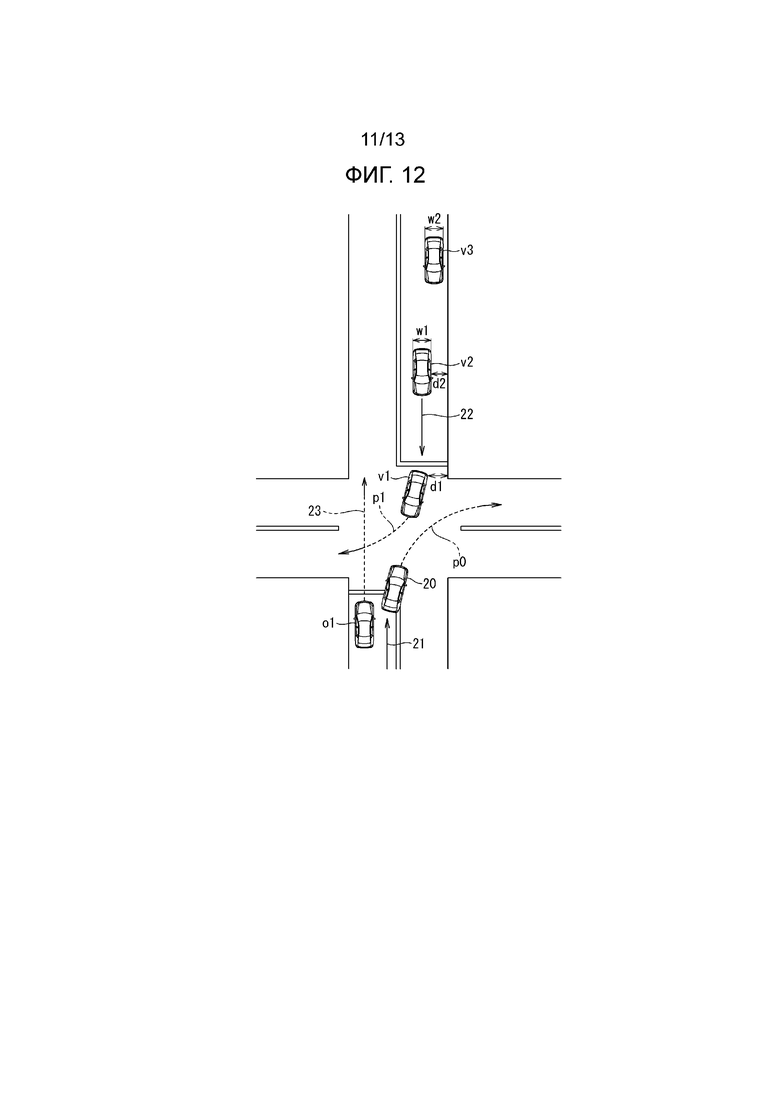
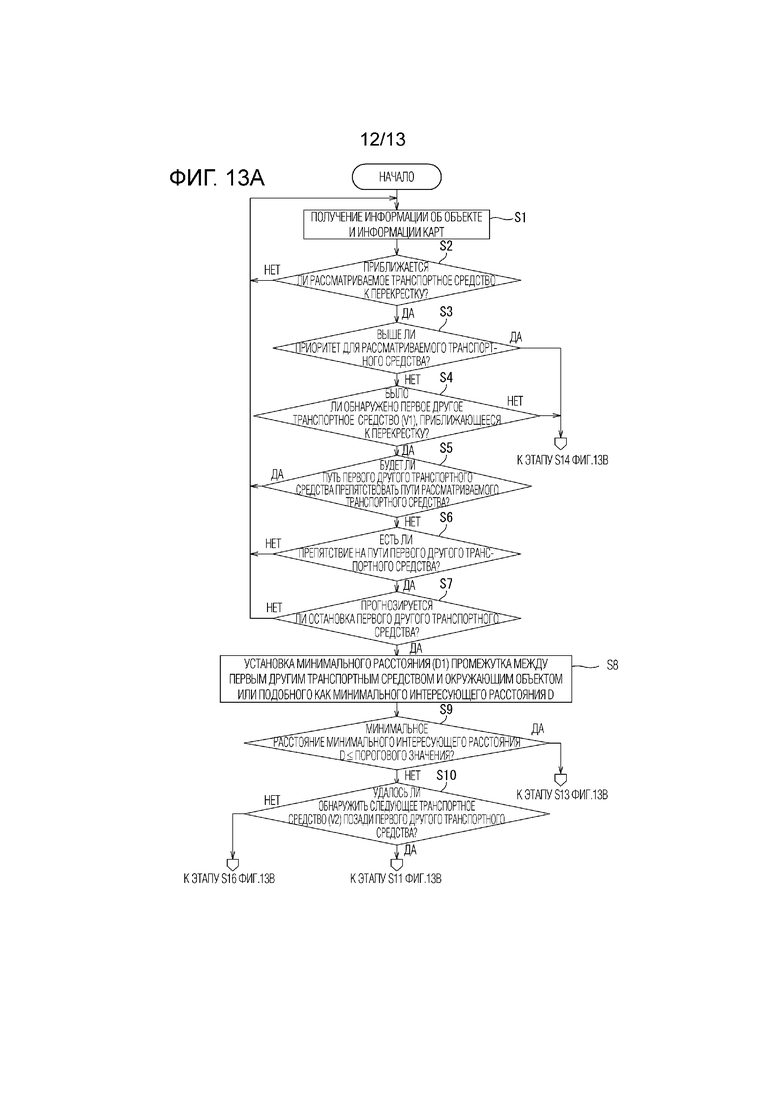
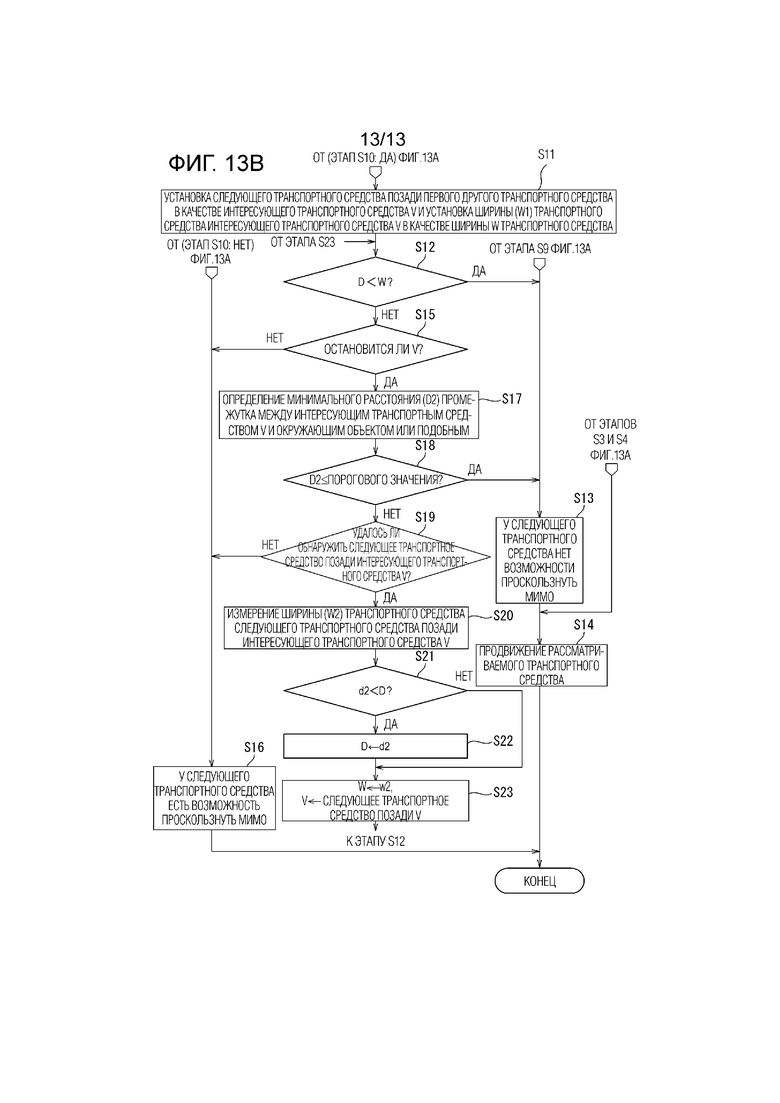
Группа изобретений относится к способу и устройству помощи при вождении. Устройство содержит: датчик и контроллер. Датчик выполнен с возможностью обнаружения первого транспортного средства, въезжающего на перекресток на первом маршруте. Рассматриваемое транспортное средство движется по второму маршруту, отличному от первого маршрута. Контроллер выполнен с возможностью прогнозирования: остановится ли первое транспортное средство на перекрестке и положения остановки первого транспортного средства; когда прогнозируется остановка первого транспортного средства на перекрестке, вычисляется минимальное расстояние первого промежутка между кузовом первого транспортного средства и окружающим объектом вокруг первого транспортного средства или между кузовом первого транспортного средства и краем дороги полосы движения первого транспортного средства; прогнозирование в соответствии с вычисленным минимальным расстоянием, сможет ли второе транспортное средство, являющееся следующим транспортным средством за первым транспортным средством, проскользнуть через первый промежуток позади первого транспортного средства. Достигается повышение безопасности вождения автономного транспортного средства на перекрестке. 2 н. и 10 з.п. ф-лы, 17 ил.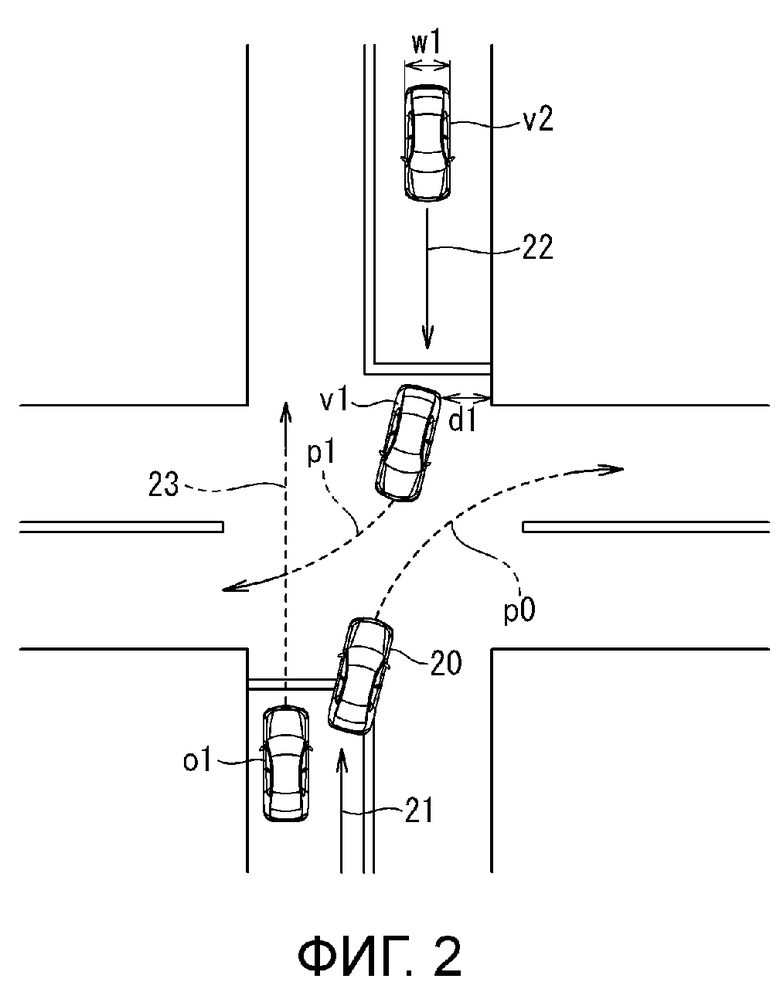
1. Способ помощи при вождении, содержащий:
обнаружение первого другого транспортного средства, въезжающего на перекресток на первом маршруте, где рассматриваемое транспортное средство движется по второму маршруту, отличному от первого маршрута;
прогнозирование того, остановится ли первое другое транспортное средство на перекрестке, и прогнозирование положения остановки первого другого транспортного средства, когда прогнозируется, что первое другое транспортное средство остановится на перекрестке;
вычисление минимального расстояния первого промежутка между кузовом транспортного средства первого другого транспортного средства и окружающим объектом вокруг первого другого транспортного средства или между кузовом транспортного средства первого другого транспортного средства и краем дороги полосы движения первого другого транспортного средства, когда первое другое транспортное средство останавливается в прогнозируемом положении остановки; а также
прогнозирование в соответствии с вычисленным минимальным расстоянием, может ли второе другое транспортное средство, которое является следующим транспортным средством за первым другим транспортным средством, проскользнуть через первый промежуток позади первого другого транспортного средства.
2. Способ помощи при вождении по п. 1, в котором, когда приоритет для рассматриваемого транспортного средства для движения по маршруту для проезда через перекресток ниже, чем приоритет для движения по полосе движения первого другого транспортного средства, прогнозируется, может ли второе другое транспортное средство проскользнуть через первый промежуток позади первого другого транспортного средства.
3. Способ помощи при вождении по п. 1 или 2, в котором, когда вычисленное минимальное расстояние равно или меньше, чем ранее определенное заданное пороговое значение, прогнозируется, что у второго другого транспортного средства нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства.
4. Способ помощи при вождении по любому из пп. 1-3, содержащий определение ширины транспортного средства второго другого транспортного средства, при этом, когда определенная ширина транспортного средства второго другого транспортного средства больше, чем вычисленное минимальное расстояние, прогнозируется, что у второго другого транспортного средства нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства.
5. Способ помощи при вождении по любому из пп. 1-4, в котором при наличии препятствия на пути первого другого транспортного средства прогнозируется остановка первого другого транспортного средства на перекрестке.
6. Способ помощи при вождении по п. 5, в котором препятствие на пути первого другого транспортного средства представляет собой предшествующее транспортное средство впереди первого другого транспортного средства, затор впереди на пути первого другого транспортного средства, другое транспортное средство, движущееся по пути, пересекающемуся с путем первого другого транспортного средства, рассматриваемое транспортное средство или пешеход на пути первого другого транспортного средства.
7. Способ помощи при вождении по любому из пп. 1-6, в котором, когда первый промежуток представляет собой промежуток между кузовом транспортного средства первого другого транспортного средства и окружающим объектом вокруг первого другого транспортного средства, каждая из множества точек на внешней периферийной поверхности кузова транспортного средства первого другого транспортного средства выбирается последовательно, определяется каждая комбинация выбранной точки и множества точек на внешней периферийной поверхности окружающего объекта и наименьшее расстояние среди расстояний между точками в определенной комбинации вычисляется как минимальное расстояние первого промежутка.
8. Способ помощи при вождении по любому из пп. 1-6, в котором, когда первый промежуток представляет собой промежуток между кузовом транспортного средства первого другого транспортного средства и краем дороги полосы движения первого другого транспортного средства, каждая из множества точек на внешней периферийной поверхности кузова транспортного средства первого другого транспортного средства последовательно выбирается, определяется каждая комбинация выбранной точки и множества точек на крае дороги и наименьшее расстояние среди расстояний между точками в определенных комбинациях вычисляется как минимальное расстояние первого промежутка.
9. Способ помощи при вождении по любому из пп. 1-8, в котором край дороги представляет собой стену, бордюр, ограждение, столб инженерной связи, дорожный знак или линию полосы движения, запрещающую смену полосы движения.
10. Способ помощи при вождении по любому из пп. 1-9, в котором определяется ширина транспортного средства третьего другого транспортного средства, которое является следующим транспортным средством, следующим за вторым другим транспортным средством; и вычисляется минимальное расстояние второго промежутка между кузовом транспортного средства второго другого транспортного средства и окружающим объектом вокруг второго другого транспортного средства или между кузовом транспортного средства второго другого транспортного средства и краем дороги полосы движения второго другого транспортного средства, при этом, когда ширина транспортного средства третьего другого транспортного средства больше, чем меньшее расстояние из минимального расстояния первого промежутка и минимального расстояния второго промежутка, прогнозируется, что у третьего другого транспортного средства нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства.
11. Способ помощи при вождении по любому из пп. 1-10, в котором, когда прогнозируется, что у другого транспортного средства нет возможности проскользнуть через первый промежуток позади первого другого транспортного средства, рассматриваемое транспортное средство продвигается по запланированному маршруту, чтобы проехать на перекрестке.
12. Устройство помощи при вождении, содержащее:
датчик, выполненный с возможностью обнаружения первого другого транспортного средства, въезжающего на перекресток на первом маршруте, где рассматриваемое транспортное средство движется по второму маршруту, отличному от первого маршрута; и
контроллер, выполненный с возможностью прогнозирования, остановится ли первое другое транспортное средство на перекрестке, прогнозирования положения остановки первого другого транспортного средства, когда прогнозируется остановка первого другого транспортного средства на перекрестке, вычисления минимального расстояния первого промежутка между кузовом транспортного средства первого другого транспортного средства и окружающим объектом вокруг первого другого транспортного средства или между кузовом транспортного средства первого другого транспортного средства и краем дороги полосы движения первого другого транспортного средства, и прогнозирования, в соответствии с вычисленным минимальным расстоянием, сможет ли второе другое транспортное средство, которое является следующим транспортным средством за первым другим транспортным средством, проскользнуть через первый промежуток позади первого другого транспортного средства.
| JP 2004178194 A, 24.06.2004 | |||
| JP 2010211297 A, 24.09.2010 | |||
| JP 2018158709 A, 11.10.2018 | |||
| WO 2013021491 A1, 14.02.2013 | |||
| WO 2016170647 A1, 27.10.2016. |

