Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу и устройству помощи при вождении для автономного транспортного средства, которые запрашивают пассажира в рассматриваемом транспортном средстве для подтверждения проезда через перекресток, и при приеме подтверждения от пассажира, управляют рассматриваемым транспортным средством, чтобы проезжать через перекресток.
Уровень техники
[0002] Для автономных транспортных средств, которые выполняют управление автономным транспортным средством, патентный документ 1 раскрыт в качестве традиционной системы помощи при автономном вождении, которая обеспечивает возможность пользователю выполнять операцию вождения надлежащим образом даже после того, как управление автономным вождением прекращается. В системе помощи при автономном вождении, раскрытой в патентном документе 1, чтобы обеспечивать возможность пользователю выполнять операцию надлежащим образом даже после того, как управление автономным вождением прекращается, пользователь многократно с предварительно определенными интервалами информируется в отношении содержимого следующей и последующих операций управления при управлении автономным вождением.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2015-141476
Сущность изобретения
Техническая задача
[0004] Тем не менее, в случае поворота направо или налево на перекрестке, может потребоваться длительное время для того, чтобы проезжать через перекресток в зависимости от ситуации на перекрестке. В таком случае, вышеуказанная традиционная система помощи при автономном вождении должна многократно с предварительно определенными интервалами информировать пользователя в отношении содержимого операции управления при управлении автономным вождением. Проблема с этим состоит в том, что пользователь должен прослушивать инструкции с идентичным содержимым много раз и в силу этого чувствует раздражение.
[0005] Настоящее изобретение предложено с учетом вышеизложенной ситуации, и в силу этого его задача заключается в том, чтобы предоставлять способ и устройство помощи при вождении, которые могут уменьшать раздражение, испытываемое пассажиром из-за инструкций, выдаваемых пассажиру.
Решение задачи
[0006] Чтобы разрешать вышеуказанную проблему, в способе и устройстве помощи при вождении согласно аспекту настоящего изобретения, обнаруживается ситуация на перекрестке, к которому приближается рассматриваемое транспортное средство, и то, должно или нет рассматриваемое транспортное средство выполнять временную остановку на перекрестке, определяется на основе обнаруженной ситуации на перекрестке. Затем если определяется то, что временная остановка требуется, момент времени, чтобы запрашивать пассажира для подтверждения проезда через перекресток, задерживается по сравнению с моментом времени, который в противном случае должен использоваться, если определяется то, что временная остановка не требуется.
Преимущества изобретения
[0007] Согласно настоящему изобретению, можно уменьшать раздражение, испытываемое пассажиром из-за инструкций во время проезда через перекресток.
Краткое описание чертежей
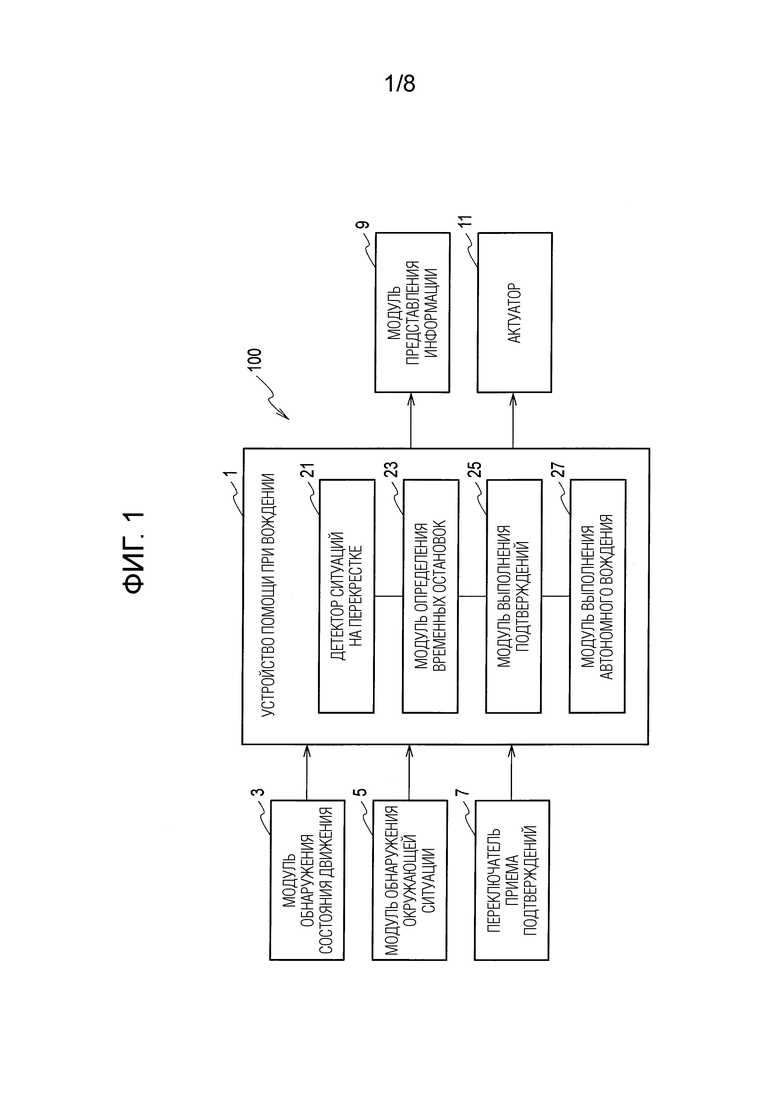
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы помощи при вождении, включающей в себя устройство помощи при вождении согласно одному варианту осуществления настоящего изобретения.
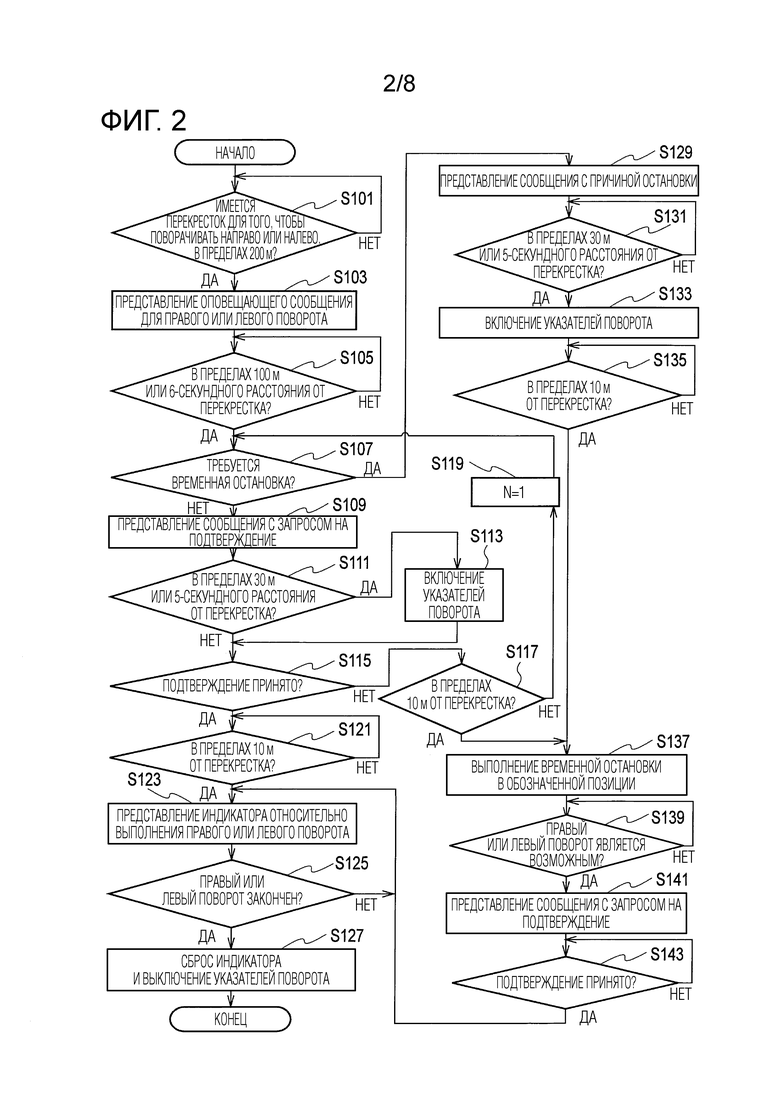
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру обработки в процессе помощи при вождении посредством устройства помощи при вождении согласно одному варианту осуществления настоящего изобретения.
Фиг. 3 является схемой для пояснения процесса помощи при вождении в случае, если временная остановка не требуется.
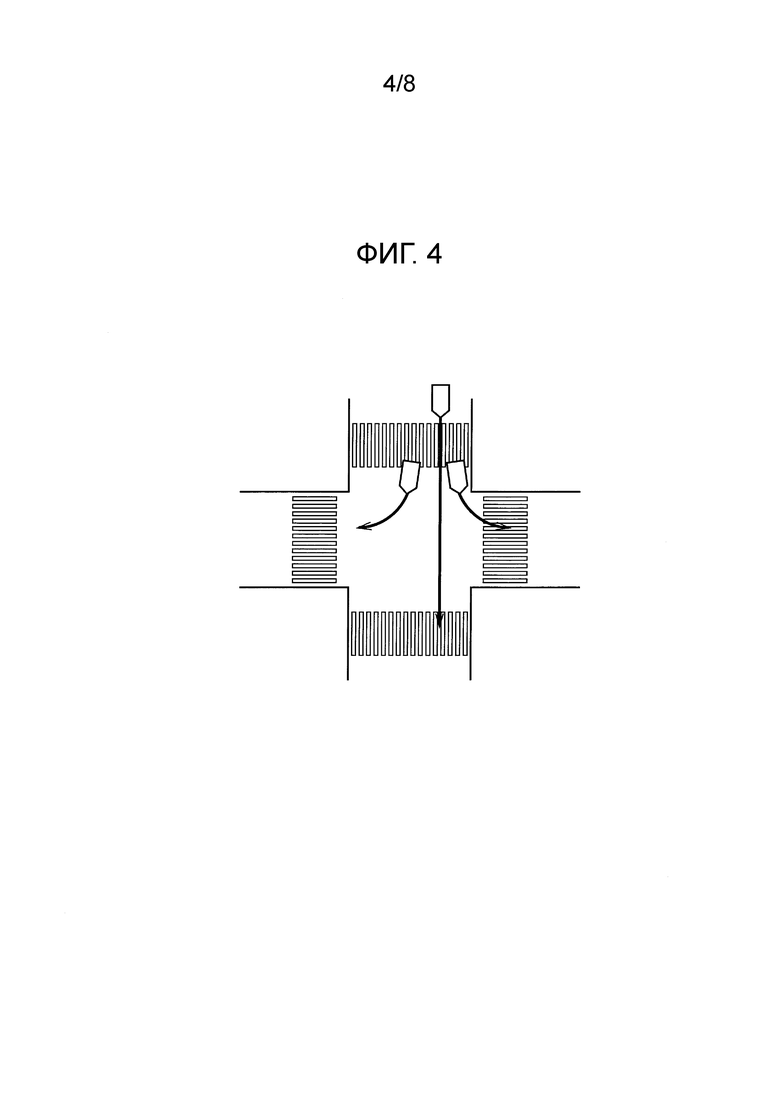
Фиг. 4 является схемой для пояснения процесса помощи при вождении в случае, если обнаруживаются ситуации на пешеходных переходах.
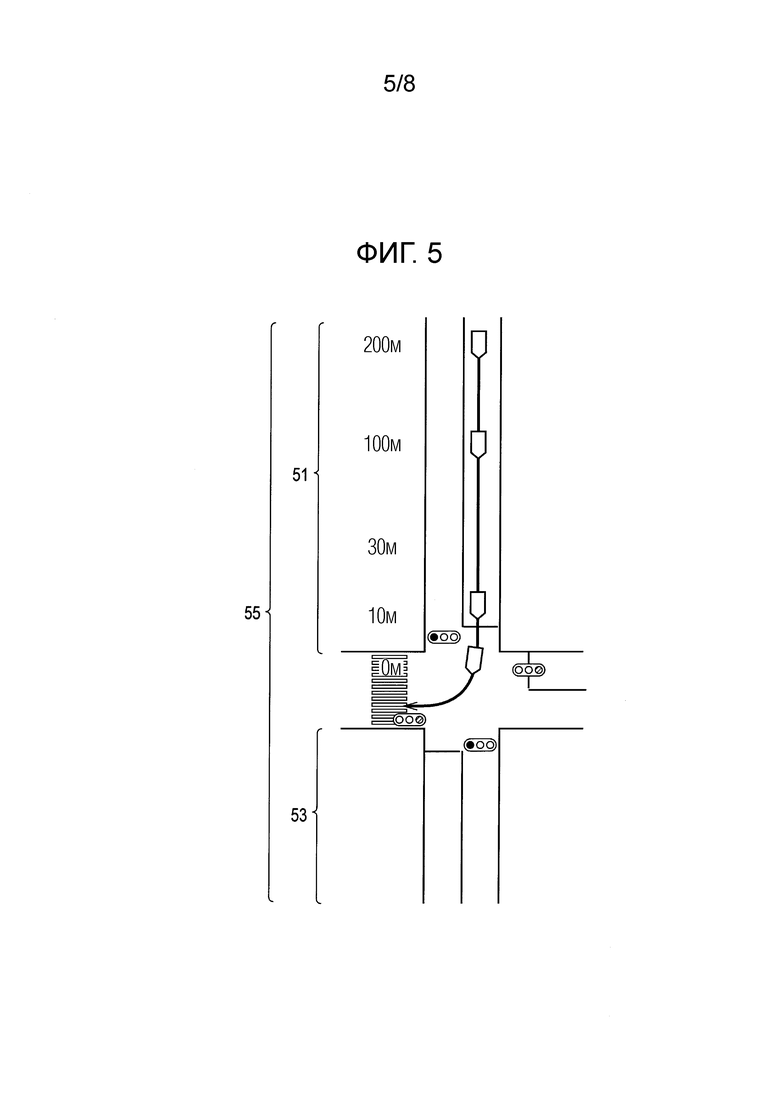
Фиг. 5 является схемой для пояснения процесса помощи при вождении в случае, если встречная полоса движения перегружена.
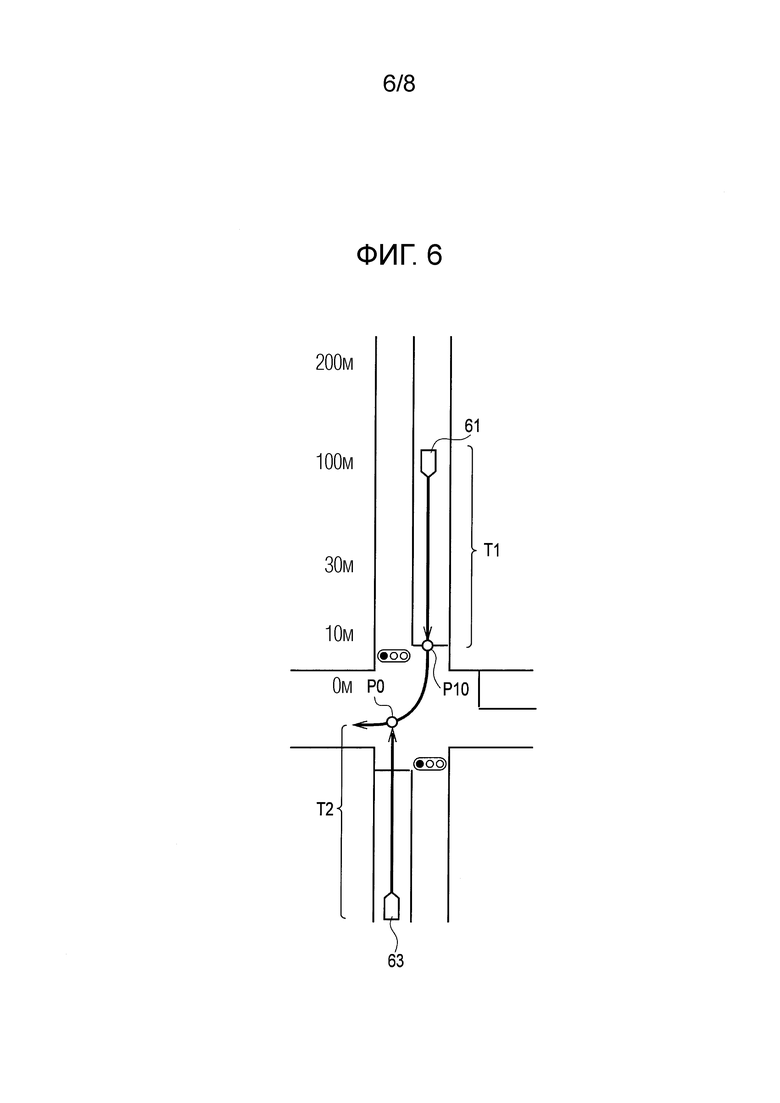
Фиг. 6 является схемой для пояснения процесса помощи при вождении в случае, если встречное транспортное средство приближается к перекрестку.
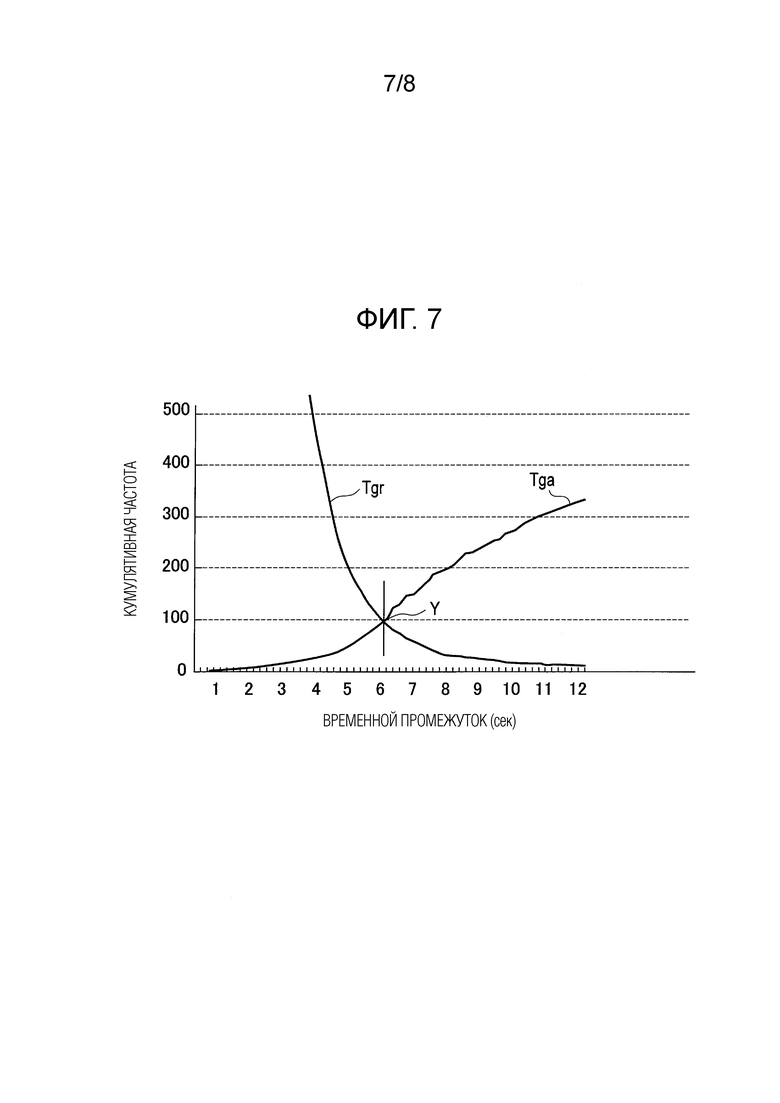
Фиг. 7 является схемой для пояснения способа задания временного промежутка, который должен применяться к автономному вождению.
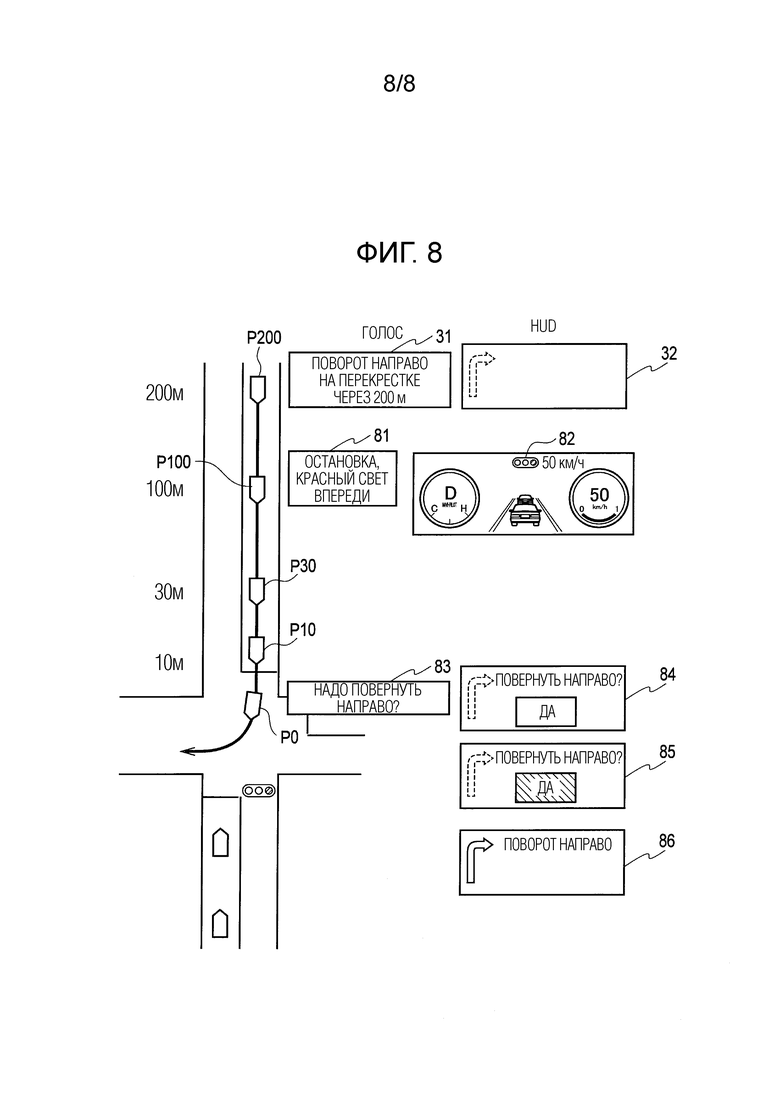
Фиг. 8 является схемой для пояснения процесса помощи при вождении в случае, если требуется временная остановка.
Подробное описание вариантов осуществления
[0009] В дальнейшем описывается один вариант осуществления, в котором применяется настоящее изобретение, со ссылкой на чертежи.
[0010] Конфигурация системы помощи при вождении
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы помощи при вождении, включающей в себя устройство помощи при вождении согласно этому варианту осуществления. Как проиллюстрировано на фиг. 1, система 100 помощи при вождении согласно этому варианту осуществления включает в себя устройство 1 помощи при вождении, модуль 3 обнаружения состояния движения, модуль 5 обнаружения окружающей ситуации, переключатель 7 приема подтверждений и модуль 9 представления информации. Дополнительно, система 100 помощи при вождении соединяется с актуатором 11, установленным на транспортном средстве.
[0011] Устройство 1 помощи при вождении представляет собой контроллер, который помогает в вождении автономного транспортного средства. В частности, автономное транспортное средство с устройством 1 помощи при вождении, установленным в нем, выполняет процесс, предусматривающий запрос пассажира в рассматриваемом транспортном средстве для подтверждения проезда через перекресток, и при приеме подтверждения от пассажира, управление рассматриваемым транспортным средством таким образом, чтобы проезжать через перекресток. Кроме того, устройство 1 помощи при вождении обнаруживает ситуацию на перекрестке, к которому приближается рассматриваемое транспортное средство, и определяет то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, на основе обнаруженной ситуации на перекрестке. Затем при определении того, что временная остановка потребуется, устройство 1 помощи при вождении управляет моментом времени, чтобы запрашивать пассажира для подтверждения проезда через перекресток таким образом, что момент времени должен задерживаться по сравнению с моментом времени, который в противном случае должен использоваться, если определяется то, что временная остановка не потребуется. Здесь, устройство 1 помощи при вождении включает в себя детектор 21 ситуаций на перекрестке, модуль 23 определения временных остановок, модуль 25 выполнения подтверждений и модуль 27 выполнения автономного вождения.
[0012] Модуль 3 обнаружения состояния движения обнаруживает данные, указывающие состояния движения рассматриваемых транспортных средств, такие как местоположение, скорость, угол поворота при рулении и ускорение рассматриваемого транспортного средства. Например, модуль 3 обнаружения состояния движения сконфигурирован из бортовой сети, такой как, CAN (контроллерная сеть), и навигационного устройства.
[0013] Модуль 5 обнаружения окружающей ситуации обнаруживает данные, указывающие ситуацию около рассматриваемого транспортного средства, такие как расстояние до перекрестка, состояние отображения светофора впереди рассматриваемого транспортного средства, пешеходы на пешеходных переходах и транспортные средства во встречной полосе движения. Например, модуль 5 обнаружения окружающей ситуации сконфигурирован из камеры, лазерного радара и навигационного устройства, установленного на транспортном средстве. Следует отметить, что модуль 5 обнаружения окружающей ситуации может обнаруживать состояние отображения светофора посредством использования связи между транспортным средством и дорожной инфраструктурой. Кроме того, модуль 5 обнаружения окружающей ситуации может обнаруживать пешеходов на пешеходных переходах посредством использования связи между транспортным средством и дорожной инфраструктурой и/или IC-тегов в смартфонах и т.п. Дополнительно, модуль 5 обнаружения окружающей ситуации может обнаруживать присутствие транспортных средств и ситуацию затора во встречной полосе движения посредством использования связи между транспортными средствами и/или облачной услуги, связанной со смартфоном. Кроме того, модуль 5 обнаружения окружающей ситуации может обнаруживать ситуации на пешеходных переходах и ситуации затора во встречной полосе движения посредством обращения к предыстории в этих местоположениях.
[0014] Переключатель 7 приема подтверждений представляет собой переключатель, который устанавливается на транспортном средстве и принимает подтверждение проезжать через перекресток от пассажира в транспортном средстве. Например, переключатель 7 приема подтверждений сконфигурирован как кнопка, отображаемая на сенсорном экране, или нажимная кнопка подтверждения (средство задания команд). Позиция, в которой предоставляется переключатель 7 приема подтверждений, находится на дисплее, руле, сиденье, центральной консоли, двери, внутренней панели, удаленном функциональном терминале, смартфоне и т.п. Переключатель 7 приема подтверждений не обязательно должен быть закрепленным и может быть подвижным. Подвижный переключатель 7 приема подтверждений может повышать свое удобство использования для пассажира посредством перемещения в соответствии с позицией пассажирского сиденья.
[0015] Модуль 9 представления информации сконфигурирован из дисплея, дисплея на лобовом стекле, приборного панельного блока, громкоговорителя и т.д. и представляет такую информацию, как запрос на подтверждение или причина временной остановки, пассажиру, по меньшей мере, акустически или визуально.
[0016] Актуатор 11 представляет собой средство приведения в действие, установленное с возможностью приводить в действие такие компоненты, как акселератор, тормоза и система рулевого управления рассматриваемого транспортного средства.
[0017] Далее описываются модули, составляющие устройство 1 помощи при вождении. Детектор 21 ситуаций на перекрестке получает данные по состояниям движения рассматриваемого транспортного средства, обнаруженным посредством модуля 3 обнаружения состояния движения, и данные по ситуации около рассматриваемого транспортного средства, обнаруженной посредством модуля 5 обнаружения окружающей ситуации, и на основе расстояния до перекрестка, определяет то, находится или нет рассматриваемое транспортное средство в состоянии приближения к перекрестку. Затем, если рассматриваемое транспортное средство находится в состоянии приближения, детектор 21 ситуаций на перекрестке обнаруживает ситуацию в приближающемся перекрестке впереди рассматриваемого транспортного средства. Целевые перекрестки для обнаружения включают в себя перекрестки со светофорами и перекрестки, в которых рассматриваемое транспортное средство должно поворачивать направо или налево. Кроме того, детектор 21 ситуаций на перекрестке прогнозирует ситуацию на перекрестке в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке. Например, из текущей скорости и местоположения рассматриваемого транспортного средства и текущего состояния отображения светофора, детектор 21 ситуаций на перекрестке прогнозирует состояние отображения светофора в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке. Дополнительно, из текущей скорости и местоположения рассматриваемого транспортного средства и текущего местоположения и относительной скорости любого встречного транспортного средства, детектор 21 ситуаций на перекрестке прогнозирует состояние встречного транспортного средства и ситуацию затора в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке. Кроме того, из текущей скорости и местоположения рассматриваемого транспортного средства и текущего местоположения и скорости любого переходящего через дорогу пешехода, детектор 21 ситуаций на перекрестке прогнозирует состояние переходящего через дорогу пешехода в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке.
[0018] На основе ситуации на перекрестке, обнаруженной посредством детектора 21 ситуаций на перекрестке, модуль 23 определения временных остановок определяет то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке. Например, модуль 23 определения временных остановок определяет то, что временная остановка потребуется, если светофор является красным или желтым. Модуль 23 определения временных остановок также определяет то, что временная остановка потребуется, если сигнал разрешения на проезд (стрелка) в направлении движения рассматриваемого транспортного средства не включается, пешеход и т.п. переходит через пешеходный переход в конце пути правого поворота, встречная полоса движения перегружена, встречное транспортное средство приближается к перекрестку таким образом, что имеется короткий временной промежуток, либо в других аналогичных ситуациях. Вышеуказанный временной промежуток означает продолжительность между временем, когда встречное транспортное средство проезжает перекресток, и временем, когда рассматриваемое транспортное средство проезжает перекресток. Модуль 23 определения временных остановок может быть выполнен с возможностью измерять время, когда предварительно определенная часть каждого транспортного средства проезжает предварительно определенную позицию внутри перекрестка. Различные части транспортного средства проезжают предварительно определенную позицию на перекрестке в различные моменты времени, в силу чего часть, которая достигает конкретной позиции внутри перекрестка первой, может задаваться в качестве вышеуказанной предварительно определенной части транспортного средства.
[0019] В соответствии с определением посредством модуля 23 определения временных остановок, модуль 25 выполнения подтверждений выполняет процесс запроса пассажира для подтверждения проезда через перекресток, и прием подтверждения от пассажира. В частности, если определяется то, что временная остановка потребуется, модуль 25 выполнения подтверждений управляет моментом времени, чтобы запрашивать пассажира для подтверждения проезда через перекресток таким образом, что момент времени должен задерживаться по сравнению с моментом времени, который должен использоваться, если определяется то, что временная остановка не требуется. Кроме того, модуль 25 выполнения подтверждений задает зону приема подтверждений, в которой подтверждение проезжать через перекресток принимается от пассажира перед перекрестком, к которому приближается рассматриваемое транспортное средство.
[0020] Модуль 27 выполнения автономного вождения управляет рассматриваемым транспортным средством таким образом, что оно движется посредством выполнения автономного вождения в соответствии с пунктом назначения, введенным пассажиром в рассматриваемом транспортном средстве, и намеченным путем движения, заданным на основе ситуации около рассматриваемого транспортного средства. Например, согласно намеченному пути движения, модуль 27 выполнения автономного вождения включает указатели поворота и инструктирует рассматриваемому транспортному средству поворачивать направо или налево на перекрестке или выполнять временную остановку. Между тем, чтобы выполнять такое автономное вождение, модуль 27 выполнения автономного вождения выводит управляющие сигналы в актуатор 11.
[0021] Следует отметить, что устройство 1 помощи при вождении сконфигурировано из электронной схемы общего назначения, включающей в себя микрокомпьютер, микропроцессор и CPU и периферийное устройство, такое как запоминающее устройство. Дополнительно, посредством выполнения конкретной программы, устройство 1 помощи при вождении работает в качестве вышеописанного детектора 21 ситуаций на перекрестке, модуля 23 определения временных остановок, модуля 25 выполнения подтверждений и модуля 27 выполнения автономного вождения. Каждая из этих функций устройства 1 помощи при вождении может реализовываться с помощью одной или более схем обработки. Примеры схем обработки включают в себя программируемые обрабатывающие устройства, такие как обрабатывающие устройства, включающие в себя электрические схемы, а также включают в себя устройства, такие как специализированные интегральные схемы (ASIC) и традиционные схемные компоненты, выполненные с возможностью выполнять функции, описанные в варианте осуществления.
[0022] Процедура процесса помощи при вождении
Далее описывается процедура процесса помощи при вождении посредством устройства 1 помощи при вождении согласно этому варианту осуществления со ссылкой на блок-схему последовательности операций способа на фиг. 2. Процесс помощи при вождении, проиллюстрированный на фиг. 2, начинается, когда зажигание транспортного средства включается, и движение начинается. Следует отметить, что в нижеприведенном описании, главным образом поясняется случай, в котором транспортное средство выполняет правый поворот, но аналогичный процесс является применимым к случаям, в которых транспортное средство выполняет левый поворот. Кроме того, в нижеприведенном описании, главным образом поясняется случай, в котором используется левостороннее движение, но процесс также является применимым к случаям, в которых используется правостороннее движение.
[0023] Как проиллюстрировано на фиг. 2, во-первых на этапе S101, детектор 21 ситуаций на перекрестке получает текущее местоположение рассматриваемого транспортного средства и определяет расстояние до приближающегося перекрестка впереди рассматриваемого транспортного средства, чтобы за счет этого определять то, имеется или нет перекресток для того, чтобы поворачивать направо или налево, в пределах 200 м впереди рассматриваемого транспортного средства. Если отсутствует перекресток для того, чтобы поворачивать направо или налево, процесс этапа S101 продолжается. Если имеется перекресток для того, чтобы поворачивать направо или налево, процедура переходит к этапу S103.
[0024] На этапе S103, модуль 27 выполнения автономного вождения представляет оповещающее сообщение для правого или левого поворота. Например, как проиллюстрировано на фиг. 3, если рассматриваемое транспортное средство должно поворачивать направо, модуль 27 выполнения автономного вождения выводит голосовое сообщение 31 "Поворот направо на перекрестке через 200 м", и изображение 32, указывающее стрелку правого поворота, в модуль 9 представления информации в точке P200, которая находится за 200 м до перекрестка. Модуль 9 представления информации выводит голосовое сообщение 31 из громкоговорителя и отображает изображение 32 на дисплее на лобовом стекле (HUD).
[0025] На этапе S105, детектор 21 ситуаций на перекрестке определяет то, уменьшено или нет расстояние до приближающегося перекрестка впереди рассматриваемого транспортного средства в пределах 100 м, либо то, приближается или нет рассматриваемое транспортное средство в пределы 6-секундного расстояния к перекрестку с учетом своей скорости. Если перекресток не приближается в пределы 100 м, процесс этапа S105 продолжается. Если перекресток приближается в пределы 100 м, процедура переходит к этапу 107.
[0026] На этапе S107, модуль 23 определения временных остановок определяет то, требуется или нет временная остановка на перекрестке, к которому приближается рассматриваемое транспортное средство, на основе ситуации на перекрестке, обнаруженной посредством детектора 21 ситуаций на перекрестке. Здесь, состояние сигнала светофора на перекрестке, к которому приближается рассматриваемое транспортное средство, уже обнаружено посредством детектора 21 ситуаций на перекрестке. Таким образом, на основе обнаруженного состояния сигнала светофора, модуль 23 определения временных остановок определяет то, требуется или нет временная остановка на перекрестке, к которому приближается рассматриваемое транспортное средство. Например, модуль 23 определения временных остановок определяет то, что временная остановка не потребуется, если светофор является зеленым, и то, что временная остановка потребуется, если светофор является красным или желтым. Дополнительно, модуль 23 определения временных остановок определяет то, что временная остановка не потребуется, если светофор является красным или желтым, но разрешение на проезд обнаруживается из сигнала светофора, выделенного для правого-левого поворота (стрелки или сигнала светофора с другим временем), в качестве состояния сигнала светофора, т.е. если выдано разрешение на проезд, к примеру, как стрелка в направлении движения рассматриваемого транспортного средства.
[0027] Между тем, детектор 21 ситуаций на перекрестке прогнозирует ситуацию на перекрестке в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке. Например, при обнаружении того, что светофор в данный момент является красным или желтым, детектор 21 ситуаций на перекрестке прогнозирует то, что светофор будет красным также в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке. Кроме того, если светофор для проезжей части является зеленым, но светофоры для пешеходных переходов являются красными, детектор 21 ситуаций на перекрестке прогнозирует то, что светофор для проезжей части будет красным через несколько секунд. Таким образом, на основе такого прогнозирования, модуль 23 определения временных остановок определяет то, что светофор будет красным в то время, когда рассматриваемое транспортное средство проезжает через перекресток, и в силу этого определяет то, что потребуется временная остановка. Кроме того, детектор 21 ситуаций на перекрестке может принимать момент времени, в который переключается светофор, через связь между транспортным средством и дорожной инфраструктурой и вычислять время, которое требуется для того, чтобы достигать перекрестка, из текущей скорости рассматриваемого транспортного средства и текущего расстояния до перекрестка, чтобы прогнозировать состояние светофора в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке.
[0028] Дополнительно, поскольку детектор 21 ситуаций на перекрестке уже обнаружил ситуации на пешеходных переходах на перекрестке, к которому приближается рассматриваемое транспортное средство, модуль 23 определения временных остановок может определять то, потребуется или нет временная остановка на перекрестке, на основе обнаруженных ситуаций на пешеходных переходах. Например, модуль 23 определения временных остановок определяет то, что временная остановка потребуется, если пешеход, велосипед и т.п. переходит через пешеходный переход впереди рассматриваемого транспортного средства в направлении движения, и определяет то, что временная остановка не потребуется, если пешеход, велосипед и т.п. не переходит через пешеходный переход. Здесь, как проиллюстрировано на фиг. 4, целевой пешеходный переход варьируется в зависимости от направления движения рассматриваемого транспортного средства, того, рассматриваемое транспортное средство поворачивает направо, поворачивает налево или движется по прямой. Таким образом, модуль 23 определения временных остановок определяет то, что временная остановка потребуется, при обнаружении пешехода или велосипеда, в данный момент переходящего через целевой пешеходный переход впереди рассматриваемого транспортного средства в направлении движения, либо при обнаружении пешехода или велосипеда, который прогнозированно должен переходить через пешеходный переход, когда рассматриваемые транспортные средства достигают его. Таким образом, детектор 21 ситуаций на перекрестке прогнозирует ситуацию на целевом пешеходном переходе из намеченного пути движения и скорости рассматриваемого транспортного средства, расстояния до пешеходного перехода, расстояния до любого целевого объекта, присутствующего около перекрестка, и его направления движения и скорости, и модуль 23 определения временных остановок определяет на основе этого прогнозирования то, потребуется или нет временная остановка.
[0029] Кроме того, поскольку детектор 21 ситуаций на перекрестке уже обнаружил, перегружена или нет встречная полоса движения дороги, по которой движется рассматриваемое транспортное средство, модуль 23 определения временных остановок может определять то, потребуется или нет временная остановка на перекрестке, на основе обнаруженной ситуации затора во встречной полосе движения. Детектор 21 ситуаций на перекрестке измеряет скорости других транспортных средств, движущихся во встречной полосе движения, расстояния между транспортными средствами и т.д., чтобы обнаруживать затор. Например, детектор 21 ситуаций на перекрестке определяет то, что встречная полоса движения перегружена, при обнаружении, по меньшей мере, одного встречного транспортного средства, движущегося на 30 км/ч или ниже приблизительно в пределах 100 м от рассматриваемого транспортного средства. Следует отметить, что пороговое значение скорости для определения может изменяться в соответствии с типом дороги или ограничением скорости. Например, пороговое значение задается равным 30 км/ч или ниже, когда ограничение скорости составляет 50 км/ч или выше, и пороговое значение задается равным 20 км/ч или ниже, когда ограничение скорости составляет 40 км/ч или ниже. Между тем, что касается способа обнаружения затора, затор может считываться с помощью датчика, установленного на рассматриваемом транспортном средстве, или обнаруживаться через связь между транспортным средством и дорожной инфраструктурой либо через связь между транспортными средствами.
[0030] Кроме того, как проиллюстрировано на фиг. 5, диапазон обнаружения затора может представлять собой зону 51 между рассматриваемым транспортным средством и приближающимся перекрестком или зону 53 на другой стороне перекрестка, к которому приближается рассматриваемое транспортное средство. Еще альтернативно, диапазон обнаружения затора может представлять собой зону 55, охватывающую зоны 51 и 53 и внутреннюю часть перекрестка.
[0031] Дополнительно, поскольку детектор 21 ситуаций на перекрестке уже обнаружил любое встречное транспортное средство, которое должно въезжать на перекресток, к которому приближается рассматриваемое транспортное средство, модуль 23 определения временных остановок может определять то, потребуется или нет временная остановка на перекрестке, на основе временного промежутка между обнаруженным встречным транспортным средством и рассматриваемым транспортным средством. Временной промежуток означает разность между временем, когда встречное транспортное средство достигает перекрестка, и временем, когда рассматриваемое транспортное средство достигает перекрестка. В дальнейшем описывается временной промежуток в точке, когда рассматриваемое транспортное средство начинает правый поворот на перекрестке, со ссылкой на фиг. 6. Как проиллюстрировано на фиг. 6, при условии, что время, которое требуется для рассматриваемого транспортного средства 61, чтобы достигать позиции P10 стоп-линии из текущего местоположения, составляет T1 секунд, и время, которое требуется для обнаруженного встречного транспортного средства, чтобы достигать перекрестка P0 из своего местоположения, составляет T2 секунд, T2-T1 представляет собой временной промежуток.
[0032] Здесь, описывается способ определения того, потребуется или нет временная остановка, на основе временного промежутка. Накопление данных по временному промежутку в начальной точке правого поворота на перекрестке указывает то, что водители, пытающиеся поворачивать направо на перекрестке, принимают решение между выполнением правого поворота и невыполнением правого поворота. Фиг. 7 является схемой, иллюстрирующей примерное накопление временного промежутка для каждого из решений, принимаемых во время попытки поворачивать направо на перекрестке, между выполнением правого поворота и невыполнением правого поворота. Как проиллюстрировано на фиг. 7, посредством накопления временного промежутка Tga в качестве последовательности временных промежутков, предоставляемых водителями, которые выполняют правый поворот, и временного промежутка Tgr в качестве последовательности временных промежутков, предоставляемых водителями, которые не выполняют правый поворот, кумулятивное частотное распределение может получаться для каждого временного промежутка. Критический промежуток Y присутствует в качестве временного промежутка, в который кумулятивная частота равна между временным промежутком Tga, предоставляемым водителями, которые выполняют правый поворот, и временным промежутком Tgr, предоставляемым водителями, которые не выполняют правый поворот (50% выполняют правый поворот, и 50% не выполняют правый поворот), и составляет приблизительно шесть секунд на фиг. 7. Затем если временной промежуток составляет шесть секунд, половина водителей должна выполнять правый поворот, а другая половина водителей не должна выполнять правый поворот. Таким образом, если T2-T1<6 секунд, модуль 23 определения временных остановок определяет то, что требуется временная остановка. Чтобы обеспечивать большую безопасность, временной промежуток может задаваться равным семи-восьми секундам. Следует отметить, что местоположение встречного транспортного средства и время, которое требуется для него, чтобы достигать перекрестка, может считываться посредством рассматриваемого транспортного средства посредством использования картографических данных либо получаться посредством использования связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами.
[0033] Если определяется то, что временная остановка не потребуется, в результате определения того, потребуется или нет временная остановка, на этапе S107, как описано выше, в соответствии с состоянием сигнала светофора, ситуацией затора во встречной полосе движения, ситуациями на пешеходных переходах и временным промежутком с любым встречным транспортным средством, процедура переходит к этапу S109. С другой стороны, если определяется то, что временная остановка потребуется, процедура переходит к этапу S129.
[0034] Во-первых, описывается случай, в котором определяется то, что временная остановка не потребуется. На этапе S109, модуль 25 выполнения подтверждений представляет сообщение с запросом на подтверждение, чтобы запрашивать пассажира для подтверждения проезда через перекресток. В частности, модуль 25 выполнения подтверждений представляет сообщение с запросом на подтверждение, если число N раз, когда сообщение с запросом на подтверждение представлено, равно 0, т.е. если сообщение с запросом на подтверждение никогда не представлялось для перекрестка, к которому приближается рассматриваемое транспортное средство. Например, как проиллюстрировано на фиг. 3, если рассматриваемое транспортное средство должно поворачивать направо, модуль 25 выполнения подтверждений выводит голосовое сообщение 33 "Надо повернуть направо?," и изображение 34, отображающее стрелку правого поворота и индикатор "Да", который предлагает подтверждение, в модуль 9 представления информации в точке P100, которая находится за 100 м до перекрестка. Как результат, голосовое сообщение 33 выводится из громкоговорителя модуля 9 представления информации, и изображение 34 отображается на дисплее на лобовом стекле модуля 9 представления информации.
[0035] Здесь, на основе ситуации на перекрестке, модуль 25 выполнения подтверждений может определять то, необходимо или нет запрашивать пассажира для подтверждения проезда через перекресток, и при определении того, что необязательно осуществлять это, может не запрашивать пассажира для подтверждения проезда через перекресток. Например, модуль 25 выполнения подтверждений может не запрашивать пассажира на предмет подтверждения, если рассматриваемое транспортное средство находится в абсолютно управляемом окружении дороги, к примеру, в конструкции на частной земле, или если рассматриваемое транспортное средство может надежно распознавать состояние светофоров и ситуацию во встречной полосе движения через связь между транспортным средством и дорожной инфраструктурой, связь между транспортными средствами и т.п. Дополнительно, модуль 25 выполнения подтверждений может не запрашивать пассажира на предмет подтверждения также в том случае, если рассматриваемое транспортное средство может надежно определять ситуацию на перекрестке на основе дня недели и времени дня, например, если рассматриваемое транспортное средство может определять то, что отсутствуют встречные транспортные средства, поскольку дорога является односторонней в утренние часы.
[0036] Кроме того, модуль 25 выполнения подтверждений задает зону приема подтверждений перед перекрестком, к которому приближается рассматриваемое транспортное средство. Эта зона приема подтверждений представляет собой зону, в которой подтверждение проезжать через перекресток принимается от пассажира. Как проиллюстрировано на фиг. 3, в ситуации, в которой временная остановка не требуется, зона от точки P100, которая находится за 100 м до перекрестка, до точки P10, которая находится за 10 м до перекрестка и позиции стоп-линии, задается в качестве зоны приема подтверждений.
[0037] На этапе S111, детектор 21 ситуаций на перекрестке определяет то, уменьшено или нет расстояние до приближающегося перекрестка впереди рассматриваемого транспортного средства до в пределах 30 м, либо то, приближается или нет рассматриваемое транспортное средство в пределы 5-секундного расстояния к перекрестку с учетом своей скорости. Если перекресток не приближается в пределы 30 м, процедура переходит к этапу 115. Если перекресток приближается в пределы 30 м, процедура переходит к этапу 113.
[0038] На этапе S113, модуль 27 выполнения автономного вождения включает указатели поворота на стороне, в которую собирается поворачивать рассматриваемое транспортное средство. Здесь, в случае если рассматриваемое транспортное средство должно поворачивать на перекрестке согласно намеченному пути движения, заданному заранее, модуль 27 выполнения автономного вождения включает указатели поворота независимо от того, запрошено или принято либо нет подтверждение. В частности, модуль 27 выполнения автономного вождения включает указатели поворота рассматриваемого транспортного средства независимо от того, запрошен или нет пассажир для подтверждения проезда через перекресток, либо того, принято или нет подтверждение проезжать через перекресток от пассажира.
[0039] На этапе S115, модуль 25 выполнения подтверждений определяет то, принято или нет подтверждение от пассажира внутри зоны приема подтверждений. В частности, модуль 25 выполнения подтверждений определяет то, подтверждает либо нет пассажир правый или левый поворот рассматриваемого транспортного средства. Если подтверждение принято от пассажира, "Да" в изображении 35 подсвечивается, как проиллюстрировано на фиг. 3, чтобы указывать то, что подтверждение выдано. После этого процедура переходит к этапу S121. С другой стороны, если подтверждение не принято от пассажира, процедура переходит к этапу S117. Следует отметить, что модуль 25 выполнения подтверждений может регулировать изображение, представленное пассажиру, когда он запрашивается на предмет подтверждения таким образом, что чем ближе рассматриваемое транспортное средство приближается к перекрестку, тем с большей вероятностью пассажир должен выбирать изображение. Примеры включают в себя увеличение размера "Да" в изображении 35, чем ближе рассматриваемое транспортное средство приближается к перекрестку, увеличение области на дисплее для ответа на нажатие "Да" в изображении 35, чем ближе рассматриваемое транспортное средство приближается к перекрестку, и т.д.
[0040] На этапе S117, детектор 21 ситуаций на перекрестке определяет то, уменьшено или нет расстояние до приближающегося перекрестка впереди рассматриваемого транспортного средства до в пределах 10 м, т.е. то, достигает или нет рассматриваемое транспортное средство позиции стоп-линии на перекрестке. Если рассматриваемое транспортное средство не достигает позиции в 10 м от перекрестка, процедура переходит к этапу S119, число N раз, которое представлено сообщение с запросом на подтверждение, задается равным "1", и процедура возвращается к этапу S107. С другой стороны, если рассматриваемое транспортное средство достигает позиции в 10 м от перекрестка, процедура переходит к этапу S137. На этапе S137, который описывается ниже, рассматриваемому транспортному средству инструктируется выполнять временную остановку в обозначенной позиции. Таким образом, если подтверждение проезжать через перекресток не принимается от пассажира внутри зоны приема подтверждений, рассматриваемому транспортному средству инструктируется выполнять временную остановку на перекрестке.
[0041] С другой стороны, если подтверждение принято на этапе S115, детектор 21 ситуаций на перекрестке на этапе S121 определяет то, уменьшено или нет расстояние до приближающегося перекрестка впереди рассматриваемого транспортного средства до в пределах 10 м, т.е. то, достигает или нет рассматриваемое транспортное средство позиции стоп-линии на перекрестке. На этом этапе, как проиллюстрировано на фиг. 3, отображается изображение 36, указывающее то, что правый поворот должен выполняться. Если рассматриваемое транспортное средство не достигает позиции в 10 м от перекрестка, детектор 21 ситуаций на перекрестке продолжает процесс этапа S121. Если рассматриваемое транспортное средство достигает позиции в 10 м от перекрестка, процедура переходит к этапу S123.
[0042] На этапе S123, модуль 27 выполнения автономного вождения представляет индикатор относительно выполнения правого или левого поворота. Например, как проиллюстрировано на фиг. 3, модуль 27 выполнения автономного вождения выводит изображение 37, отображающее стрелку правого поворота со сплошной линией, в модуль 9 представления информации в позиции P0 внутри перекрестка. Как результат, изображение 37 отображается на дисплее на лобовом стекле модуля 9 представления информации.
[0043] На этапе S125, модуль 27 выполнения автономного вождения определяет то, закончен либо нет правый или левый поворот рассматриваемого транспортного средства. Если правый или левый поворот не закончен, процедура возвращается к этапу S123, чтобы продолжать представление индикатора относительно выполнения. Если правый или левый поворот закончен, процедура переходит к этапу S127.
[0044] На этапе S127, модуль 27 выполнения автономного вождения сбрасывает индикатор относительно выполнения правого или левого поворота и выключает указатели поворота. Затем, процесс помощи при вождении повторяется до тех пор, пока зажигание транспортного средства с. Процесс помощи при вождении согласно этому варианту осуществления завершается, когда зажигание выключается.
[0045] Далее описывается случай, в котором на этапе S107 определяется то, что временная остановка потребуется. На этапе S129, модуль 23 определения временных остановок представляет сообщение с причиной остановки. Например, как проиллюстрировано на фиг. 8, в случае остановки на красный свет, модуль 23 определения временных остановок выводит команду, чтобы выводить голосовое сообщение 81 "Остановка, красный свет впереди" и включать значок 82 красного света в приборном панельном блоке в точке P100, которая находится за 100 м до перекрестка. Как результат, голосовое сообщение 81 выводится из громкоговорителя модуля 9 представления информации, и значок 82 красного света в приборном панельном блоке включается. Другие примеры голосового сообщения включают в себя "Остановка, встречное транспортное средство впереди", "Остановка, пешеход впереди" и т.д. Кроме того, другие примеры отображения включают в себя отображение встречного транспортного средства или значка пешехода на дисплее, отображение подсветки и т.д. Следует отметить, что в случае, если определяется то, что временная остановка потребуется, причина временной остановки должна представляться пассажиру, по меньшей мере, акустически или визуально независимо от того, запрошен или нет пассажир для подтверждения проезда через перекресток, либо того, принято или нет подтверждение проезжать через перекресток от пассажира.
[0046] На этапе S131, детектор 21 ситуаций на перекрестке определяет то, уменьшено или нет расстояние до приближающегося перекрестка впереди рассматриваемого транспортного средства до в пределах 30 м, либо то, приближается или нет рассматриваемое транспортное средство в пределы 5-секундного расстояния к перекрестку с учетом своей скорости. Если перекресток не приближается в пределы 30 м, процесс этапа S131 продолжается. Если перекресток приближается в пределы 30 м, процедура переходит к этапу 133.
[0047] На этапе S133, модуль 27 выполнения автономного вождения включает указатели поворота на стороне, в которую собирается поворачивать рассматриваемое транспортное средство. Здесь, в случае если рассматриваемое транспортное средство должно поворачивать на перекрестке согласно намеченному пути движения, заданному заранее, модуль 27 выполнения автономного вождения включает указатели поворота независимо от того, запрошено или принято либо нет подтверждение. В частности, модуль 27 выполнения автономного вождения включает указатели поворота рассматриваемого транспортного средства независимо от того, запрошен или нет пассажир для подтверждения проезда через перекресток, либо того, принято или нет подтверждение проезжать через перекресток от пассажира.
[0048] На этапе S135, детектор 21 ситуаций на перекрестке определяет то, уменьшено или нет расстояние до приближающегося перекрестка впереди рассматриваемого транспортного средства до в пределах 10 м, т.е. то, достигает или нет рассматриваемое транспортное средство позиции стоп-линии на перекрестке. Если рассматриваемое транспортное средство не достигает позиции в 10 м от перекрестка, процесс этапа S135 продолжается. С другой стороны, если рассматриваемое транспортное средство достигает позиции в 10 м от перекрестка, процедура переходит к этапу S137.
[0049] На этапе S137, модуль 27 выполнения автономного вождения инструктирует рассматриваемому транспортному средству выполнять временную остановку в обозначенной позиции. Например, в ситуации, в которой светофор является красным, или перекресток представляет собой перекресток, требующий временной остановки, модуль 27 выполнения автономного вождения инструктирует рассматриваемому транспортному средству выполнять временную остановку на стоп-линии. В ситуации, в которой рассматриваемое транспортное средство должно ожидать, чтобы поворачивать направо, модуль 27 выполнения автономного вождения инструктирует рассматриваемому транспортному средству выполнять временную остановку внутри перекрестка. Кроме того, в ситуации, в которой имеется едущее впереди транспортное средство, переходящий через дорогу пешеход и т.п., модуль 27 выполнения автономного вождения инструктирует рассматриваемому транспортному средству выполнять временную остановку перед ним. Следует отметить, что если определено то, что временная остановка требуется, модуль 27 выполнения автономного вождения инструктирует рассматриваемому транспортному средству выполнять временную остановку на перекрестке независимо от того, запрошен или нет пассажир для подтверждения проезда через перекресток, либо того, принято или нет подтверждение проезжать через перекресток от пассажира.
[0050] На этапе S139, модуль 27 выполнения автономного вождения определяет то, может либо нет рассматриваемое транспортное средство поворачивать направо или налево, на основе ситуации на перекрестке, обнаруженной посредством детектора 21 ситуаций на перекрестке. Определение может выполняться посредством способа, аналогичного способу вышеуказанного определения относительно того, требуется или нет временная остановка, на этапе S107. Например, модуль 27 выполнения автономного вождения определяет то, может либо нет рассматриваемое транспортное средство поворачивать направо или налево, в соответствии с состоянием сигнала светофора, ситуацией затора во встречной полосе движения, ситуацией на пешеходном переходе и временного промежутка с любым встречным транспортным средством. Если определяется то, что рассматриваемое транспортное средство не может поворачивать направо или налево, процесс этапа S139 продолжается. Если определяется то, что рассматриваемое транспортное средство может поворачивать направо или налево, процедура переходит к этапу S141. В общем, после того, как причина необходимости временной остановки разрешается, процедура переходит к этапу S141, на котором пассажир запрашивается для подтверждения проезда через перекресток. Следует отметить, что этот вариант осуществления описывается на основе случая, в котором пассажир не запрашивается для подтверждения проезда через перекресток, когда определяется то, что временная остановка требуется. Тем не менее, возникают случаи, когда пассажир уже запрошен для подтверждения проезда через перекресток, когда определяется то, что временная остановка требуется. Примеры включают в себя случай, в котором встречное транспортное средство обнаруживается после запроса подтверждения, случай, в котором светофор переключается с желтого света на красный свет после запроса подтверждения, и т.д. В этих случаях, пассажир запрашивается для подтверждения проезда через перекресток снова после того, как разрешается причина необходимости временной остановки.
[0051] На этапе S141, модуль 25 выполнения подтверждений представляет сообщение с запросом на подтверждение, чтобы запрашивать пассажира для подтверждения проезда через перекресток. Например, как проиллюстрировано на фиг. 8, если рассматриваемое транспортное средство должно поворачивать направо, модуль 25 выполнения подтверждений выводит голосовое сообщение 83 "Надо повернуть направо?" и изображение 84, отображающее стрелку правого поворота и индикатор "Да", который предлагает подтверждение, в модуль 9 представления информации в позиции P0 внутри перекрестка. Как результат, голосовое сообщение 83 выводится из громкоговорителя модуля 9 представления информации, и изображение 84 отображается на дисплее на лобовом стекле модуля 9 представления информации. Как описано выше, модуль 25 выполнения подтверждений запрашивает подтверждение в позиции временной остановки и принимает подтверждение в этой позиции. Таким образом, в ситуации, в которой временная остановка требуется, зона приема подтверждений представляет собой позицию временной остановки.
[0052] Здесь, в ситуации, в которой временная остановка не потребуется, к примеру, в ситуации, описанной с использованием фиг. 3, подтверждение запрашивается, когда рассматриваемое транспортное средство находится в точке P100, которая находится в пределах 100 м от перекрестка. С другой стороны, в ситуации, в которой временная остановка требуется, подтверждение запрашивается, когда рассматриваемое транспортное средство находится в позиции P0 внутри перекрестка, как проиллюстрировано на фиг. 8. Таким образом, если определяется то, что временная остановка потребуется, момент времени, чтобы запрашивать пассажира для подтверждения проезда через перекресток, задерживается по сравнению с моментом времени, который в противном случае должен использоваться, если определяется то, что временная остановка не потребуется. Таким образом, даже если время, которое требуется для того, чтобы проезжать через перекресток, является длительным вследствие определенной ситуации, запрос на подтверждение не должен представляться многократно. Это может уменьшать раздражение, испытываемое пассажиром. Например, в современном уровне техники, даже в ситуации, в которой временная остановка потребуется, подтверждение запрашивается много раз перед перекрестком. Тем не менее, в этом варианте осуществления, в ситуации, в которой временная остановка потребуется, подтверждение запрашивается только в позиции временной остановки внутри перекрестка. Это предотвращает многократное представление запроса на подтверждение и, соответственно, может уменьшать раздражение, испытываемое пассажиром.
[0053] На этапе S143, модуль 25 выполнения подтверждений определяет то, принято или нет подтверждение от пассажира. В частности, модуль 25 выполнения подтверждений определяет то, подтверждает либо нет пассажир правый или левый поворот рассматриваемого транспортного средства. Если подтверждение не принято от пассажира, процесс этапа S143 продолжается. Если подтверждение принято от пассажира, "Да" в изображении 85 подсвечивается, как проиллюстрировано на фиг. 8, чтобы указывать то, что подтверждение выдано. После этого, процедура переходит к этапу S123, чтобы представлять индикатор относительно выполнения правого поворота, проиллюстрированного в изображении 86 на фиг. 8. После того, как правый поворот заканчивается, процесс помощи при вождении повторяется до тех пор, пока зажигание транспортного средства не будет выключено. Затем процесс помощи при вождении согласно этому варианту осуществления завершается, когда зажигание выключается.
[0054] Преимущества варианта осуществления
Как подробно описано выше, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживается ситуация на перекрестке, к которому приближается рассматриваемое транспортное средство, и то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, определяется на основе обнаруженной ситуации на перекрестке. Затем если определяется то, что временная остановка потребуется, момент времени, чтобы запрашивать пассажира для подтверждения проезда через перекресток, задерживается по сравнению с моментом времени, который должен использоваться, если определяется то, что временная остановка не потребуется. Таким образом, можно уменьшать раздражение, испытываемое пассажиром из-за инструкций во время проезда через перекресток.
[0055] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, если определяется то, что временная остановка потребуется, на основе ситуации на перекрестке, определяется то, разрешается или нет причина необходимости временной остановки, и если определяется то, что причина разрешается, пассажир запрашивается для подтверждения проезда через перекресток. Таким образом, подтверждение не запрашивается при условии, что ситуация, когда временная остановка требуется, продолжается. Следовательно, можно запрашивать пассажира на предмет подтверждения в соответствующий момент времени. Это может уменьшать раздражение, испытываемое пассажиром.
[0056] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, если пассажир уже запрошен для подтверждения проезда через перекресток, когда определяется то, что временная остановка потребуется, на основе ситуации на перекрестке, определяется то, разрешается или нет причина необходимости временной остановки, и если определяется то, что причина необходимости временной остановки разрешается, пассажир запрашивается снова для подтверждения проезда через перекресток. Таким образом, даже если подтверждение уже запрошено, подтверждение не должно запрашиваться при условии, что ситуация, когда временная остановка требуется, продолжается. Следовательно, можно запрашивать пассажира на предмет подтверждения в соответствующий момент времени. Это может уменьшать раздражение, испытываемое пассажиром.
[0057] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, если определяется то, что требуется временная остановка, рассматриваемому транспортному средству инструктируется выполнять временную остановку на перекрестке независимо от того, запрошен или нет пассажир для подтверждения проезда через перекресток, либо того, принято или нет подтверждение проезжать через перекресток от пассажира. Таким образом, решению посредством автономного вождения касательно того, чтобы выполнять временную остановку, отдается приоритет относительно решения пассажиром въезжать на перекресток. Это обеспечивает возможность безопасного проезда через перекресток.
[0058] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, если определяется то, что временная остановка потребуется, причина временной остановки представляется пассажиру, независимо от того, запрошен или нет пассажир для подтверждения проезда через перекресток, либо того, принято или нет подтверждение проезжать через перекресток от пассажира. Таким образом, пассажир может выяснять причину временной остановки. Следовательно, можно предоставлять ощущение безопасности пассажиру.
[0059] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, если рассматриваемое транспортное средство должно поворачивать на перекрестке, указатели поворота рассматриваемого транспортного средства включаются независимо от того, запрошено или нет подтверждение проезжать через перекресток, либо того, принято или нет подтверждение проезжать через перекресток. Таким образом, можно позволять пассажиру выяснять то, что рассматриваемое транспортное средство поворачивает направо или налево на перекрестке, а также позволять окружающим транспортным средствам распознавать то, что рассматриваемое транспортное средство поворачивает.
[0060] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживается то, перегружена или нет встречная полоса движения дороги, по которой движется рассматриваемое транспортное средство, и если встречная полоса движения перегружена, определяется то, что рассматриваемое транспортное средство должно выполнять временную остановку на перекрестке. Таким образом, если встречная полоса движения перегружена, рассматриваемое транспортное средство начинает временную остановку на перекрестке. Следовательно, можно предоставлять ощущение безопасности пассажиру.
[0061] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживается то, перегружена или нет встречная полоса движения между рассматриваемым транспортным средством и перекрестком. Таким образом, используется информация относительно транспортных средств, которые проезжают перекресток. Соответственно, можно точно определять ситуацию на перекрестке.
[0062] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживается то, перегружена или нет встречная полоса движения перед перекрестком, к которому приближается рассматриваемое транспортное средство. Таким образом, используется информация относительно нижележащей стороны перекрестка, т.е. стороны, которая ближе к рассматриваемому транспортному средству и которую проще обнаруживать. Это позволяет точно определять ситуацию на перекрестке.
[0063] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживается то, перегружена или нет встречная полоса движения за пределами перекрестка, к которому приближается рассматриваемое транспортное средство. Таким образом, используется информация относительно вышележащей стороны перекрестка, т.е. транспортных средств, которые должны въезжать на перекресток, через который проезжает рассматриваемое транспортное средство. Это позволяет точно определять ситуацию на перекрестке.
[0064] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживается состояние сигнала светофора на перекрестке, к которому приближается рассматриваемое транспортное средство, и то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, определяется на основе состояния сигнала светофора. Таким образом, состояние сигнала светофора может использоваться для того, чтобы точно определять то, потребуется или нет временная остановка на перекрестке.
[0065] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, определяется то, что рассматриваемому транспортному средству не потребуется выполнять временную остановку на перекрестке, если разрешение на проезд обнаруживается из сигнала светофора, выделенного для правого-левого поворота, в качестве состояния сигнала светофора. Таким образом, рассматриваемое транспортное средство может проезжать через перекресток без встречных транспортных средств или переходящих через дорогу пешеходов и в силу этого может проезжать через перекресток безопасно.
[0066] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, прогнозируется ситуация на перекрестке в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии. Таким образом, можно определять то, требуется или нет временная остановка, посредством выяснения фактической ситуации в то время, когда рассматриваемое транспортное средство въезжает на перекресток. В силу этого, рассматриваемое транспортное средство может проезжать через перекресток безопасно.
[0067] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживаются ситуации на пешеходных переходах на перекрестке, к которому приближается рассматриваемое транспортное средство, и то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, определяется на основе ситуаций на пешеходных переходах. Таким образом, с учетом присутствия пешеходов и велосипедов, можно более точно определять то, требуется или нет временная остановка на перекрестке.
[0068] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, обнаруживается любое встречное транспортное средство, которое должно въезжать на перекресток, к которому приближается рассматриваемое транспортное средство, и то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, определяется в соответствии с временным промежутком между временем, когда встречное транспортное средство проезжает перекресток, и временем, когда рассматриваемое транспортное средство проезжает перекресток. Таким образом, можно выполнять естественное определение относительно того, следует или нет выполнять временную остановку в ситуации, в которой имеется приближающееся встречное транспортное средство.
[0069] Дополнительно, в способе и устройстве помощи при вождении согласно этому варианту осуществления, зона приема подтверждений задается перед перекрестком, к которому приближается рассматриваемое транспортное средство, и рассматриваемому транспортному средству инструктируется выполнять временную остановку на перекрестке, если подтверждение проезжать через перекресток не принимается внутри зоны приема подтверждений от пассажира. Таким образом, момент времени для того, чтобы принимать подтверждение, задается, и рассматриваемому транспортному средству инструктируется выполнять временную остановку, если подтверждение не принимается внутри этой зоны. Это может повышать уровень безопасности.
[0070] Кроме того, в способе и устройстве помощи при вождении согласно этому варианту осуществления, то, необходимо или нет запрашивать пассажира для подтверждения проезда через перекресток, определяется на основе ситуации на перекрестке, и пассажир не запрашивается для подтверждения проезда через перекресток, если определяется то, что необязательно это делать. Таким образом, пассажир не запрашивается на предмет подтверждения в ситуации, в которой рассматриваемое транспортное средство может безопасно проезжать через перекресток без подтверждения пассажира. Это может уменьшать раздражение, испытываемое пассажиром.
[0071] Следует отметить, что вышеприведенный вариант осуществления представляет собой один пример настоящего изобретения. Таким образом, настоящее изобретение не ограничено вышеописанным вариантом осуществления, и различные изменения могут вноситься в соответствии с проектным решением и т.д. в качестве режимов, отличных от этого варианта осуществления, без отступления от технической идеи настоящего изобретения, как и следовало ожидать. Например, хотя вышеописанный вариант осуществления описывается при рассмотрении в качестве примера случая, в котором используется левостороннее движение, настоящее изобретение является применимым аналогично к случаям, в которых используется правостороннее движение, как и следовало ожидать.
Список номеров ссылок
[0072] 1 - устройство помощи при вождении
3 - модуль обнаружения состояния движения
5 - модуль обнаружения окружающей ситуации
7 - переключатель приема подтверждений
9 - модуль представления информации
11 - актуатор
21 - детектор ситуаций на перекрестке
23 - модуль определения временных остановок
25 - модуль выполнения подтверждений
27 - модуль выполнения автономного вождения
100 - система помощи при вождении.

Изобретение относится к способу и устройству помощи при вождении для автономного транспортного средства. Способ помощи при вождении для автономного транспортного средства, который содержит этапы, на которых запрашивают пассажира в рассматриваемом транспортном средстве для подтверждения проезда через перекресток и при приеме подтверждения от пассажира управляют рассматриваемым транспортным средством таким образом, чтобы проезжать через перекресток. Способ содержит этапы, на которых обнаруживают ситуацию на перекрестке, к которому приближается рассматриваемое транспортное средство, определяют то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку, на перекрестке на основе ситуации на перекрестке и, если определяется то, что временная остановка потребуется, задерживают момент времени для запроса пассажира для подтверждения проезда через перекресток по сравнению с моментом времени, который должен использоваться, если определено то, что временная остановка не потребуется. Достигается повышение безопасности управления транспортным средством 2 н. и 17 з.п. ф-лы, 8 ил.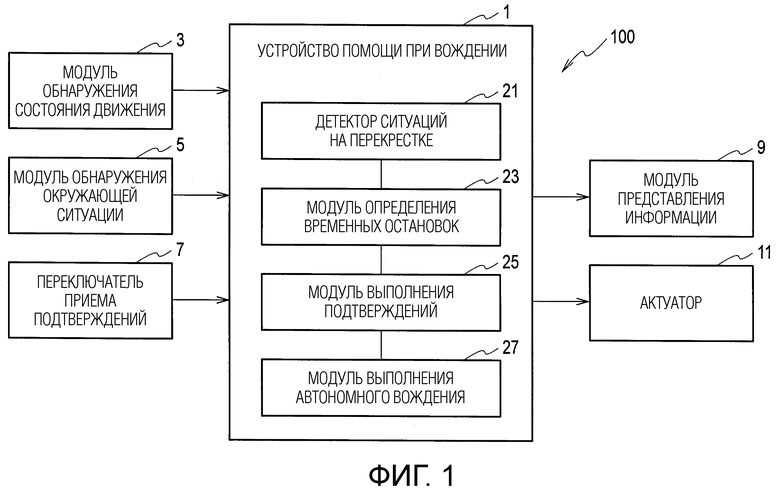
1. Способ помощи при вождении для автономного транспортного средства, содержащий этапы, на которых:
- запрашивают пассажира в рассматриваемом транспортном средстве для подтверждения проезда через перекресток, и
- при приеме подтверждения от пассажира, управляют рассматриваемым транспортным средством таким образом, чтобы проезжать через перекресток,
при этом способ дополнительно содержит этапы, на которых:
- обнаруживают ситуацию на перекрестке, к которому приближается рассматриваемое транспортное средство;
- определяют то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, на основе ситуации на перекрестке; и,
- если определяется то, что временная остановка потребуется, задерживают момент времени для запроса пассажира для подтверждения проезда через перекресток по сравнению с моментом времени, который должен использоваться, если определено то, что временная остановка не потребуется.
2. Способ помощи при вождении по п. 1, дополнительно содержащий этапы, на которых:
- если определяется то, что временная остановка потребуется, на основе ситуации на перекрестке, определяют то, решена или нет причина необходимости временной остановки; и
- если определяется то, что причина решена, запрашивают пассажира для подтверждения проезда через перекресток.
3. Способ помощи при вождении по п. 1, дополнительно содержащий этапы, на которых:
- если пассажир уже запрошен для подтверждения проезда через перекресток, когда определяется то, что временная остановка потребуется, на основе ситуации на перекрестке, определяют то, решена или нет причина необходимости временной остановки; и
- если определяется то, что причина необходимости временной остановки решена, запрашивают пассажира снова для подтверждения проезда через перекресток.
4. Способ помощи при вождении по любому из пп. 1-3, дополнительно содержащий этап, на котором:
- если определяется то, что временная остановка потребуется, на основе ситуации на перекрестке, инструктируют рассматриваемому транспортному средству выполнять временную остановку на перекрестке независимо от того, запрошен ли пассажир для подтверждения проезда через перекресток, либо того, принято ли подтверждение проезжать через перекресток от пассажира.
5. Способ помощи при вождении по п. 4, дополнительно содержащий этап, на котором:
- если определяется то, что временная остановка потребуется, на основе ситуации на перекрестке, представляют причину временной остановки пассажиру, по меньшей мере, акустически или визуально, независимо от того, запрошен ли пассажир для подтверждения проезда через перекресток, либо того, принято ли подтверждение проезжать через перекресток от пассажира.
6. Способ помощи при вождении по любому из пп. 1-3, дополнительно содержащий этап, на котором:
- если рассматриваемое транспортное средство должно поворачивать на перекрестке, включают указатель поворота рассматриваемого транспортного средства независимо от того, запрошен ли пассажир для подтверждения проезда через перекресток, либо того, принято ли подтверждение проезжать через перекресток от пассажира.
7. Способ помощи при вождении по любому из пп. 1-3, в котором:
- обнаруживается то, перегружена или нет встречная полоса движения дороги, по которой движется рассматриваемое транспортное средство, и,
- если встречная полоса движения перегружена, определяется то, что рассматриваемое транспортное средство должно будет выполнить временную остановку на перекрестке.
8. Способ помощи при вождении по п. 7, в котором обнаруживается то, перегружена или нет встречная полоса движения между рассматриваемым транспортным средством и перекрестком.
9. Способ помощи при вождении по п. 8, в котором обнаруживается то, перегружена или нет встречная полоса движения перед перекрестком, к которому приближается рассматриваемое транспортное средство.
10. Способ помощи при вождении по п. 8, в котором обнаруживается то, перегружена или нет встречная полоса движения за пределами перекрестка, к которому приближается рассматриваемое транспортное средство.
11. Способ помощи при вождении по любому из пп. 1-3, в котором:
- обнаруживается состояние сигнала светофора на перекрестке, к которому приближается рассматриваемое транспортное средство, и
- то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, определяется на основе состояния сигнала светофора.
12. Способ помощи при вождении по п. 11, в котором определяется то, что рассматриваемому транспортному средству не потребуется выполнять временную остановку на перекрестке, если разрешение на проезд обнаруживается из сигнала светофора, выделенного для правого-левого поворота, в качестве состояния сигнала светофора.
13. Способ помощи при вождении по любому из пп. 1-3, в котором ситуация на перекрестке представляет собой прогнозированную ситуацию в то время, когда рассматриваемое транспортное средство проезжает позицию стоп-линии на перекрестке.
14. Способ помощи при вождении по любому из пп. 1-3, в котором:
- обнаруживается ситуация на пешеходном переходе на перекрестке, к которому приближается рассматриваемое транспортное средство, и
- то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, определяется на основе ситуации на пешеходном переходе.
15. Способ помощи при вождении по любому из пп. 1-3, в котором:
- обнаруживается встречное транспортное средство, которое должно въезжать на перекресток, к которому приближается рассматриваемое транспортное средство,
- вычисляется временной промежуток между временем, когда встречное транспортное средство проезжает перекресток, и временем, когда рассматриваемое транспортное средство проезжает перекресток, и
- то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, определяется в соответствии с временным промежутком.
16. Способ помощи при вождении по любому из пп. 1-3, дополнительно содержащий этапы, на которых:
- задают зону приема подтверждений перед перекрестком, к которому приближается рассматриваемое транспортное средство, причем зона приема подтверждений представляет собой зону, в которой подтверждение проезжать через перекресток принимается от пассажира; и
- инструктируют рассматриваемому транспортному средству выполнять временную остановку на перекрестке, если подтверждение проезжать через перекресток не принимается внутри зоны приема подтверждений.
17. Способ помощи при вождении по любому из пп. 1-3, дополнительно содержащий этапы, на которых:
- определяют то, необходимо или нет запрашивать пассажира для подтверждения проезда через перекресток, на основе ситуации на перекрестке; и
- не запрашивают пассажира для подтверждения проезда через перекресток, если определяется то, что необязательно запрашивать пассажира для подтверждения проезда через перекресток.
18. Устройство помощи при вождении для автономного транспортного средства, которое запрашивает пассажира в рассматриваемом транспортном средстве для подтверждения проезда через перекресток и при приеме подтверждения от пассажира управляет рассматриваемым транспортным средством, чтобы проезжать через перекресток, причем устройство содержит:
- детектор, который обнаруживает ситуацию на перекрестке, к которому приближается рассматриваемое транспортное средство;
- контроллер, который определяет то, потребуется или нет рассматриваемому транспортному средству выполнять временную остановку на перекрестке, на основе ситуации на перекрестке,
при этом, если определяется, что временная остановка потребуется, контроллер задерживает момент времени для запроса пассажира для подтверждения проезда через перекресток по сравнению с моментом времени, который должен использоваться, если определено то, что временная остановка не потребуется.
19. Способ помощи при вождении по п. 1, дополнительно содержащий этапы, на которых:
- когда определяется то, что временная остановка не потребуется, на основе ситуации на перекрестке, запрашивают пассажира для подтверждения проезда через перекресток в момент времени, когда рассматриваемое транспортное средство достигло интервала в пределах предварительно определенного расстояния или предварительно определенного времени от перекрестка,
- если подтверждение не принято от пассажира в ответ на запрос подтверждения, запрашивают пассажира для подтверждения проезда через перекресток в более поздний момент времени, чем момент времени приближения к перекрестку,
- когда определяется то, что временная остановка потребуется, на основе ситуации на перекрестке, запрашивают пассажира для подтверждения проезда через перекресток только в более поздний момент времени, чем момент времени приближения к перекрестку.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОЙ ПОДДЕРЖКИ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ ТЕХНИЧЕСКОЙ ПОДДЕРЖКИ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2566326C1 |

