ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
Описание предшествующего уровня техники
[0002] В навигационном устройстве предшествующего уровня техники отображение стрелки, указывающее направление движения к выездной дороге, отображается в каждой точке разветвления, соединяющейся с круговым перекрестком (перекрестком с круговым движением), и стрелка удаляется, если перекресток проезжают. При приближении к передней части выездной дороги стрелка отображается рядом с левой стороной или правой стороной дороги.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2001-336944
Сущность изобретения
Проблема, которую призвано решить изобретение
[0004] Однако, в то время как устройство предшествующего уровня техники представляет метод для обеспечения навигации по маршруту для круговых перекрестков, это устройство также представляет метод представления времени, в которое рассматриваемое транспортное средство выезжает с кругового перекрестка, и поэтому не упоминается направление, указываемое фонарем указателя поворота. Следовательно, с устройством известного уровня техники существует риск того, что, когда рассматриваемое транспортное средство выезжает с перекрестка с круговым движением, план действий для рассматриваемого транспортного средства не будет сообщен посредством указания поворота другим транспортным средствам в окрестностях рассматриваемого транспортного средства.
[0005] Настоящее раскрытие было разработано с упором на проблему, описанную выше, целью настоящего раскрытия является обеспечение способа помощи при вождении и устройства помощи при вождении, с помощью которых план действий рассматриваемого транспортного средства сообщается посредством указания поворота другим транспортным средствам в окрестностях рассматриваемого транспортного средства, когда рассматриваемое транспортное средство выезжает с перекрестка с круговым движением.
Средства для решения этой проблемы
[0006] Для достижения цели, описанной выше, настоящее раскрытие содержит контроллер, который вычисляет маршрут движения, по которому движется рассматриваемое транспортное средство, и выполняет управление помощью при вождении на основе маршрута движения. В этом способе помощи при вождении выездная область свечения, где светится фонарь указателя поворота, указывающий что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением, устанавливается на основании маршрута движения. Пока рассматриваемое транспортное средство движется по перекрестку с круговым движением, оценивается, прибыло ли рассматриваемое транспортное средство к области свечения. Когда рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением и оценено, что рассматриваемое транспортное средство прибыло к области свечения, выполняется управление для определения свечения фонаря указателя поворота, указывающего, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0007] Таким образом, когда рассматриваемое транспортное средство выезжает с перекрестка с круговым движением, план действий для рассматриваемого транспортного средства может сообщаться посредством указания поворота другим транспортным средствам в окрестностях рассматриваемого транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] фиг. 1 - общая схема системы управления автономным вождением, к которой применены способ помощи при вождении и устройство помощи при вождении в соответствии с первым вариантом осуществления;
фиг. 2 - блок-схема управления устройства помощи при вождении, обеспеченного для процессора оценки распознавания;
фиг. 3 - схематическая диаграмма перекрестка с круговым движением;
фиг. 4 - первая блок-схема последовательности операций общего потока процесса управления помощью при вождении, выполняемого устройством помощи при вождении, обеспеченным для процессора оценки распознавания;
фиг. 5 - первая блок-схема последовательности операций общей последовательности операций процесса управления помощью при вождении, выполняемого устройством помощи при вождении, обеспеченным для процессора оценки распознавания;
фиг. 6 - схематическая диаграмма действия управления помощью при вождении и работы рассматриваемого транспортного средства на первом целевом маршруте;
фиг. 7 - схематическая диаграмма второй области свечения, действия управления помощью при вождении и работы рассматриваемого транспортного средства на втором целевом маршруте;
фиг. 8 - схематическая диаграмма второй области свечения, действия управления помощью при вождении и работы рассматриваемого транспортного средства на третьем целевом маршруте;
фиг. 9 - схематическая диаграмма второй области свечения, действия управления помощью при вождении и работы рассматриваемого транспортного средства на четвертом целевом маршруте;
фиг. 10 - схематическая диаграмма второй области свечения, действия управления помощью при вождении и работы рассматриваемого транспортного средства на пятом целевом маршруте; и
фиг. 11 - схематическая диаграмма оценки взаимного расположения, согласно относительному углу, между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства.
Предпочтительные варианты осуществления изобретения
[0009] Наилучший вариант осуществления для реализации способа помощи при вождении и устройства помощи при вождении согласно настоящему изобретению описан ниже на основе первого варианта осуществления, показанного на чертежах.
Первый вариант осуществления
[0010] Способ помощи при вождении и устройство помощи при вождении в первом варианте осуществления применяются к автономно управляемому транспортному средству (одному примеру транспортного средства с помощью при движении; рассматриваемому транспортному средству), который использует информацию маршрута движения, сгенерированную процессором оценки распознавания, и для которого движение, торможение, рулевое управление и фонарь указателя поворота управляются автономно путем выбора режима автономного вождения. Описание конфигурации первого варианта осуществления описаны ниже разделено на разделы «Общая конфигурация системы», «Конфигурация блока управления устройства помощи при вождении» и «Конфигурация процесса управления помощью при вождении».
[0011] Общая конфигурация системы описана на основе фиг. 1.
[0012] Система AD автономного вождения содержит бортовой датчик 1, блок 2 хранения картографических данных, процессор 3 оценки распознавания (контроллер) для автономного вождения, блок 4 управления автономным вождением, исполнительный механизм 5, указатели 6 поворота (фонари указателей поворота) и устройство 7 отображения.
[0013] Бортовой датчик 1 имеет камеру 11, радар 12, GPS 13 и бортовой коммуникатор 14 данных. Информация датчика, полученная бортовым датчиком 1, выводится в процессор 3 оценки распознавания.
[0014] Камера 11 представляет собой датчик распознавания окружения, который реализует функцию получения информации об окружении рассматриваемого транспортного средства, такой как полосы движения, впереди идущие транспортные средства и пешеходы, из данных изображения в качестве функции, необходимой для автономного вождения. Камера 11 конфигурируется путем объединения, например, камеры распознавания спереди рассматриваемого транспортного средства, камеры распознавания сзади, камеры распознавания справа, камеры распознавания слева и т. д.
[0015] Объекты на проезжей части рассматриваемого транспортного средства, полосы движения, объекты за пределами проезжей части рассматриваемого транспортного средства (дорожные конструкции, впереди идущие транспортные средства, сзади идущие транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды, мотоциклы), проезжая часть рассматриваемого транспортного средства (белые линии на дороге, границы дороги, стоп-линии, пешеходные переходы), дорожные знаки (ограничения скорости) и т. д. считываются камерой 11.
[0016] Радар 12 представляет собой датчик измерения расстояния, который реализует функцию определения присутствия объектов в окрестностях рассматриваемого транспортного средства и функцию определения расстояний до объектов в окрестностях рассматриваемого транспортного средства, в качестве функций, необходимых для автономного вождения. «Радар 12» в этом варианте осуществления является общим термином, включающим в себя радар, использующий радиоволны, лидар, использующий свет, и сонар, использующий ультразвуковые волны. Например, в качестве радара 12 можно использовать лазерный радар, радар на основе миллиметровых волн, ультразвуковой радар, лазерный дальномер и т. д. Радар 12 конфигурируется путем объединения, например, переднего радара рассматриваемого транспортного средства, заднего радара, правого радара, левого радара и т.д.
[0017] Определяются местоположения объектов на проезжей части рассматриваемого транспортного средства, объекты за пределами проезжей части рассматриваемого транспортного средства (дорожные конструкции, впереди идущие транспортные средства, сзади идущие транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды, мотоциклы) и т. д. и расстояние до объектов определяется радаром 12. Если угол обзора недостаточен, угол обзора можно при необходимости увеличить.
[0018] GPS 13 представляет собой датчик местоположения рассматриваемого транспортного средства, который имеет антенну 13a GNSS и использует спутниковую связь для определения местоположения рассматриваемого транспортного средства (широты и долготы), когда рассматриваемое транспортное средство остановлено или движется. «GNSS» - это сокращение от «Глобальная навигационная спутниковая система», а «GPS» - это сокращение от «Глобальная система определения местоположения».
[0019] Бортовой коммуникатор 14 данных представляет собой датчик внешних данных, который осуществляет беспроводную связь с коммуникатором 8 внешних данных через антенны 8а, 14а приемопередатчика и, таким образом, получает от внешнего источника информацию, которую невозможно получить от рассматриваемого транспортного средства.
[0020] Когда, например, коммуникатор 8 внешних данных является коммуникатором данных, установленным в другом транспортном средстве, движущемся в окрестностях рассматриваемого транспортного средства, коммуникатор 8 внешних данных выполняет связь «транспортное средство-транспортное средство» между рассматриваемым транспортным средством и другим транспортным средством. Из разных частей информации, которой обладает другое транспортное средство, информация, необходимая для рассматриваемого транспортного средства, может быть получена посредством связи «транспортное средство-транспортное средство» по запросу от бортового коммуникатора 14 данных.
[0021] Когда, например, коммуникатор 8 внешних данных является коммуникатором данных, предназначенным для инфраструктурного оборудования, коммуникатор 8 внешних данных выполняет связь «транспортное средство-инфраструктура» между рассматриваемым транспортным средством и инфраструктурным оборудованием. Из разных частей информации, которой обладает инфраструктурное оборудование, информация, необходимая для рассматриваемого транспортного средства, может быть получена посредством связи «транспортное средство-инфраструктура» по запросу от бортового коммуникатора 14 данных. Когда, например, имеется недостаточная информация в картографических данных, сохраненных в блоке 2 хранения картографических данных, или информация, которая была изменена из картографических данных, недостаточная информация или измененная информация может быть дополнена. Также возможно получить информацию о заторах, информацию об ограничениях движения и другую информацию о дорожном движении на целевом маршруте, по которому предполагается движение рассматриваемого транспортного средства.
[0022] Блок 2 хранения картографических данных конфигурируется из бортовой памяти, содержащей «электронные картографические данные», в которых связаны широта/долгота и картографическая информация. Из картографических данных, содержащихся в блоке 2 хранения картографических данных, картографические данные с центром в местоположении рассматриваемого транспортного средства отправляются в процессор 3 оценки распознавания, когда местоположение рассматриваемого транспортного средства, определенная GPS 13, распознается как информация о местоположении рассматриваемого транспортного средства процессором 3 оценки распознавания.
[0023] Картографические данные включают в себя дорожную информацию, связанную с местоположениями, и дорожная информация задана соединениями, соединяющими узлы вместе. Информация о дорогах включает в себя информацию, указывающую дороги в соответствии с их местоположениями и областями дорог, классификацию дороги для каждой дороги, ширину дороги для каждой дороги и информацию о форме дорог. Информация о дорогах включает в себя местоположения перекрестков, направления для въезда на перекрестки, классификации перекрестков и другую информацию, относящуюся к перекресткам, хранящуюся в ассоциации с каждой частью идентифицирующей информации соединения дорог. Информация о дорогах также включает в себя классификацию дорог, ширину дорог, форму дорог, возможность движения прямо вперед, приоритетное отношение движения, возможность обгона (возможность въезда на соседнюю полосу движения), ограничения скорости, дорожные знаки и другую информацию, относящуюся к дорогам, хранящуюся в ассоциации с каждой частью идентифицирующей информации соединения дорог.
[0024] Процессор 3 оценки распознавания выполняет комплексную обработку входной информации от бортового датчика 1 или блока 2 хранения картографических данных и генерирует целевой маршрут (маршрут движения), профиль целевой скорости транспортного средства (включая профиль ускорения и профиль замедления) и др. Сгенерированная информация о целевом маршруте и информация о профиле целевой скорости транспортного средства выводятся вместе с информацией о местоположении рассматриваемого транспортного средства и т. д. в блок 4 управления автономным вождением. В частности, целевой маршрут от текущего местоположения до пункта назначения генерируется на основе информации о дорогах из блока 2 хранения картографических данных, метода поиска маршрута и т. д., и генерируется профиль целевой скорости транспортного средства и т. д. вдоль целевого маршрута. Кроме того, когда оценивается, что автономное вождение не может поддерживаться в соответствии с результатом обнаружения окружения рассматриваемого транспортного средства бортовым датчиком 1, когда рассматриваемое транспортное средство остановлено или движется по целевому маршруту, целевой маршрут, профиль целевой скорости транспортного средства и т. д. последовательно уточняются на основе результата обнаружения окружения рассматриваемого транспортного средства. Маршрут, когда целевой маршрут уточнен, также называется целевым маршрутом. Другими словами, целевой маршрут также включает в себя уточненные маршруты. Кроме того, процессор 3 оценки распознавания выполняет управление либо для определения, какой из указателей 6 поворота, указывающих левое и правое направления, должен светиться, либо для определения, что ни один из них не должен светиться. Определенная информация указателей поворота выводится в блок 4 управления автономным вождением.
[0025] На основании входной информации из процессора 3 оценки распознавания блок 4 управления автономным вождением вычисляет значение команды движения, значение команды торможения или значение команды угла поворота рулевого колеса, которое заставляет рассматриваемое транспортное средство двигаться или останавливаться при автономном вождении по целевому маршруту. Результат вычисления значения команды движения выводится в исполнительный механизм 51 движения, результат вычисления значения команды торможения выводится в исполнительный механизм 52 торможения, а результат вычисления значения команды угла поворота рулевого колеса выводится в исполнительный механизм 53 угла поворота рулевого колеса. Кроме того, блок 4 управления автономным вождением выводит информацию указателей поворота из процессора 3 оценки распознавания в устройство 54 приведения в действие указателей поворота.
[0026] Исполнительный механизм 5 представляет собой управляющий исполнительный механизм, который заставляет рассматриваемое транспортное средство двигаться или останавливаться при автономном движении по целевому маршруту, и исполнительный механизм 5 содержит исполнительный механизм 51 движения, исполнительный механизм 52 торможения и исполнительный механизм 53 угла поворота рулевого колеса.
[0027] Исполнительный механизм 51 движения представляет собой исполнительный механизм, который принимает ввод значения команды движения от блока 4 управления автономным вождением и управляет движущей силой, передаваемой на ведущие колеса. В качестве исполнительного механизма 51 движения, например, двигатель используется в случае транспортного средства с двигателем, двигатель и электродвигатель-генератор (движущая сила) используются в случае гибридного транспортного средства, а электродвигатель-генератор (движущая сила) используется в случае электромобиля.
[0028] Исполнительный механизм 52 торможения представляет собой исполнительный механизм, который принимает ввод значения команды торможения от блока 4 управления автономным движением и управляет тормозной силой, передаваемой на ведущие колеса. Например, гидроусилитель, электрический усилитель, исполнительный механизм давления тормозной жидкости, исполнительный механизм тормозного электродвигателя, электродвигатель-генератор (регенеративный) и т. д. используются в качестве исполнительного механизма 52 торможения.
[0029] Исполнительный механизм 53 угла поворота рулевого колеса представляет собой исполнительный механизм, который принимает ввод значения команды угла поворота рулевого колеса от блока 4 управления автономным вождением и управляет углом поворота управляемых колес. Электродвигатель поворота и т. д., предусмотренный в системе передачи усилия рулевого управления системы рулевого управления, используется в качестве исполнительного механизма 53 угла поворота рулевого колеса.
[0030] Устройство 54 приведения в действие указателей поворота принимает ввод информации указателей поворота от блока 4 управления автономным движением и управляет тем, какой из указателей 6 поворота, указывающих левое и правое направления, светится, или управляет сигналами поворота так, чтобы ни один из них не светился. Соленоид указателя поворота и т. д. используется в качестве устройства 54 приведения в действие указателей поворота.
[0031] Указатели 6 поворота представляют собой фонари указателей поворота, указывающие левое и правое направления. Включением и выключением фонарей указателей 6 поворота управляет устройство 54 приведения в действие указателей поворота. Указатели поворота 6, которые светятся, являются указателем левого поворота и указателем правого поворота.
[0032] Устройство 7 отображения 7 представляет собой устройство, которое отображает на экране, в частности, когда ведущее транспортное средство движется согласно карте, и предоставляет водителю или пассажиру транспортного средства визуальную информацию о местоположении рассматриваемого транспортного средства, когда рассматриваемое транспортное средство остановлено или движется при автономном вождении. Устройство 7 отображения принимает ввод информации о целевом маршруте, информации о местоположении рассматриваемого транспортного средства, информации о пункте назначения и т. д., сгенерированные процессором 3 оценки распознавания, и отображает карту, дороги, целевой маршрут (маршрут движения рассматриваемого транспортного средства), местоположение рассматриваемого транспортного средства, пункт назначения и т. д. визуально распознаваемым образом на экране дисплея.
[0033] Конфигурация блока управления устройства помощи при вождении будет описана на основе фиг. 2 и 3.
[0034] Процессор 3 оценки распознавания содержит блок 31 генерации, блок 32 оценки прибытия к перекрестку с круговым движением и блок 33 установки области свечения. Процессор 3 оценки распознавания дополнительно содержит блок 34 оценки прибытия к первой области свечения, блок 35 оценки прибытия ко второй области свечения (блок оценки прибытия к области свечения), блок 36 оценки взаимного расположения, блок 37 оценки выезда с перекрестка с круговым движением и блок 38 управления указателями поворота (блок управления фонарями указателя поворота).
[0035] Блок 31 генерации принимает ввод информации об окружении рассматриваемого транспортного средства, информации о местоположении рассматриваемого транспортного средства, информации картографических данных и информации о пункте назначения и генерирует целевой маршрут, профиль целевой скорости транспортного средства и т. д. Сгенерированная информация о целевом маршруте и информация о профиле целевой скорости транспортного средства выводятся в блок 32 оценки прибытия к перекрестку с круговым движением, блок 37 оценки выезда с перекрестка с круговым движением и блок 4 управления автономным движением.
[0036] Блок 32 оценки прибытия к перекрестку с круговым движением принимает ввод информации о местоположении рассматриваемого транспортного средства, информации картографических данных и информации о целевом маршруте, оценивает, прибыло ли рассматриваемое транспортное средство к перекрестку с круговым движением, и выводит результат оценки вместе с информацией о целевом маршруте и т.д. в блок 33 установки области свечения и в блок 36 оценки взаимного расположения. В блоке 32 оценки прибытия к перекрестку с круговым движением оценка того, прибыло ли рассматриваемое транспортное средство к перекрестку с круговым движением, оценивает, что рассматриваемое транспортное средство V прибыло к перекрестку с круговым движением, когда рассматриваемое транспортное средство вошло в пределы заданного расстояния от перекрестка с круговым движением.
[0037] «Перекресток RA с круговым движением» является областью, ограниченной круговой пунктирной линией L1, как показано на фиг. 3. Термин «перекресток RA с круговым движением» относится к круговому перекрестку, на котором три или более дорог с R1 по R6 соединены с круговым пространством S (круговая пунктирная линия L2). В центре кругового пространства S предусмотрен центральный островок C в форме островка, через который транспортное средство не может проехать, а вокруг центрального островка C предусмотрена круговая проезжая часть (проезжая часть с движением по замкнутому кругу).
[0038] Транспортные средства проезжают с односторонним движением по круговой проезжей части CR перекрестка RA с круговым движением. Другими словами, направление кругового движения при проезде по круговой проезжей части CR является либо правым направлением, либо левым направлением. В частности, в случае левостороннего движения, как показано на фиг. 3, направление кругового движения при проезде по круговой проезжей части CR является правым, и транспортные средства проезжают по круговой проезжей части CR, поворачивая направо (см. фиг. 6-10). Дорожный знак Si устанавливается для указания направления кругового движения при проезде по круговой проезжей части CR, как показано на фиг. 3. В случае правостороннего движения направление кругового движения при проезде по круговой проезжей части CR является левым, и транспортные средства проезжают по круговой проезжей части CR, поворачивая налево.
[0039] Кроме того, на перекрестке RA с круговым движением транспортные средства, движущиеся по круговой проезжей части CR, имеют право проезда над транспортными средствами, которые собираются въехать на круговую проезжую часть CR, и транспортные средства, собирающиеся въехать на круговую проезжую часть CR, поэтому не должны препятствовать проезду транспортных средств, движущихся на круговой проезжей части CR.
[0040] На перекрестке RA с круговым движением на фиг. 3 шесть дорог R1-R6 соединены с круговой проезжей частью CR. Другими словами, шесть дорог R1-R6 соединены друг с другом посредством круговой проезжей части CR. Дороги, соединенные с круговой проезжей частью CR, далее именуются «соединительными проезжими частями». Перекресток RA с круговым движением включает в себя центральный островок C, круговую проезжую часть CR, соединительные участки круговой проезжей части CR и соединительные проезжие части R1-R6, а также участки соединительных проезжих частей R1-R6. Границы круговой пунктирной линии L1 и соединительных проезжих частей R1-R6 эквивалентны выездам и въездам соединительных проезжих частей R1-R6 и перекрестку RA с круговым движением.
[0041] Когда первая соединительная проезжая часть R1 имеет первую въездную проезжую часть R11 и первую выездную проезжую часть R12, разделительный островок SP в форме островка обеспечен между первой въездной проезжей частью R11 и первой выездной проезжей частью R12, как показано на фиг. 3. Первая въездная проезжая часть R11 в данном случае является дорогой, по которой транспортные средства въезжают на перекресток RA с круговым движением. Первая выездная проезжая часть R12 является дорогой, по которой транспортные средства выезжают с перекрестка RA с круговым движением. Назначением разделительного островка SP является разделение транспортных средств, въезжающих на перекресток RA с круговым движением, и транспортных средств, выезжающих с перекрестка RA с круговым движением. Когда таким образом обеспечен разделительный островок SP, и, например, въезд EN рассматриваемого транспортного средства для рассматриваемого транспортного средства V на перекрестке RA с круговым движением представляет собой первую проезжую часть R11, соединительная проезжая часть, соединенная с выездом EX рассматриваемого транспортного средства для рассматриваемого транспортного средства V на перекрестке RA с круговым движением является любой из со второй по шестую соединительных проезжих частей R2-R6 и первой выездной проезжей части R12. Был описан разделительный островок SP, предусмотренный для первой соединительной проезжей части R1, но разделительные островки SP также могут быть предусмотрены для со второй по шестую соединительных проезжих частей R2-R6 (см. фиг. 6-10).
[0042] Блок 33 установки области свечения принимает ввод результата оценки блока 32 оценки прибытия к перекрестку с круговым движением, информацию о целевом маршруте и т. д. Когда блок 32 оценки прибытия к перекрестку с круговым движением оценивает, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением, блок 33 установки области свечения на основе информации о целевом маршруте устанавливает область свечения, в которой будет светиться указатель 6 поворота. Блок 33 установки области свечения содержит блок 33a установки первой области свечения и блок 33b установки второй области свечения (блоки установки).
[0043] Когда блок 32 оценки прибытия к перекрестку с круговым движением оценивает, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением, блок 33a установки первой области свечения на основе информации о целевом маршруте устанавливает первую область свечения (въездную область свечения), в которой указатель 6 поворота светится, чтобы указать, что рассматриваемое транспортное средство должно въехать на перекресток с круговым движением. Первая область свечения является областью перед въездом рассматриваемого транспортного средства на перекресток с круговым движением. Блок 33a установки первой области свечения выводит первую область свечения вместе с информацией о целевом маршруте и т.д. в блок 34 оценки прибытия к первой области свечения.
[0044] Когда блок 32 оценки прибытия к перекрестку с круговым движением оценивает, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением, блок 33b установки второй области свечения на основе информации о целевом маршруте устанавливает вторую область свечения (выездную область свечения), в которой указатель 6 поворота светится, чтобы указать, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением. Бывают моменты, когда вторая область свечения устанавливается из взаимного расположения между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства на перекрестке с круговым движением на основе информации о целевом маршруте, и моменты, когда вторая область свечения не устанавливается. Вторая область свечения устанавливается, когда выезд рассматриваемого транспортного средства является выездом после первого выезда, следующего за въездом на перекресток с круговым движением. В этом момент вторая область свечения устанавливается между переходным положением, в котором рассматриваемое транспортное средство проезжает выезд, который непосредственно предшествует выезду рассматриваемого транспортного средства, и ближайшим местоположением, которое находится близко к выезду рассматриваемого транспортного средства. Вторая область свечения не устанавливается, когда направление, указываемое указателем 6 поворота, светящимся при въезде рассматриваемого транспортного средства на перекресток с круговым движением, противоположно направлению кругового движения при проезде по перекрестку с круговым движением, а выезд рассматриваемого транспортного средства является первым выездом после въезда на перекресток с круговым движением. Блок 33b установки второй области свечения выводит вторую область свечения вместе с информацией о целевом маршруте в блок 35 оценки прибытия ко второй области свечения.
[0045] Блок 34 оценки прибытия к первой области свечения принимает ввод первой области свечения блока 33a установки первой области свечения, информацию о местоположении рассматриваемого транспортного средства и информацию о целевом маршруте. Блок 34 оценки прибытия к первой области свечения оценивает, прибыло ли рассматриваемое транспортное средство к первой области свечения, в то время как рассматриваемое транспортное средство движется по соединительной проезжей части, соединенной с перекрестком с круговым движением. Блок 34 оценки прибытия к первой области свечения выводит результат оценки вместе с информацией о местоположении рассматриваемого транспортного средства и информацией о целевом маршруте в блок 38 управления указателями поворота. В блоке 34 оценки прибытия к первой области свечения оценка того, прибыло ли рассматриваемое транспортное средство к первой области свечения, оценивается согласно соотношению расстояний проезда.
[0046] Блок 35 оценки прибытия ко второй области свечения принимает ввод второй области свечения блока 33b установки второй области свечения, информацию о местоположении рассматриваемого транспортного средства и информацию о целевом маршруте. Блок 35 оценки прибытия ко второй области свечения оценивает, прибыло ли рассматриваемое транспортное средство ко второй области свечения, пока рассматриваемое транспортное средство движется по перекрестку с круговым движением. Блок 35 оценки прибытия ко второй области свечения затем выводит результат оценки вместе с информацией о местоположении рассматриваемого транспортного средства и информацией о целевом маршруте в блок 38 управления указателями поворота. В блоке 35 оценки прибытия ко второй области свечения оценка того, прибыло ли рассматриваемое транспортное средство ко второй области свечения, оценивается согласно соотношению расстояний проезда.
[0047] Блок 36 оценки взаимного расположения принимает ввод результата оценки блока 32 оценки прибытия к перекрестку с круговым движением, информацию о целевом маршруте и т. д. Когда блок 32 оценки прибытия к перекрестку с круговым движением оценивает, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением, блок 36 оценки взаимного расположения оценивает взаимное расположение между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства на перекрестке с круговым движением на основе информации о местоположении рассматриваемого транспортного средства и информации о целевом маршруте. Блок 36 оценки взаимного расположения затем выводит результат оценки вместе с информацией о целевом маршруте и т. д. в блок 38 управления указателями поворота. Взаимное расположение оценивается по относительному углу между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства.
[0048] Блок 37 оценки выезда с перекрестка с круговым движением принимает ввод информации о местоположении рассматриваемого транспортного средства, информации картографических данных и информации о целевом маршруте, оценивает, выехало ли рассматриваемое транспортное средство с перекрестка с круговым движением, и выводит результат оценки вместе с информацией о целевом маршруте и т. д. в блок 38 управления указателями поворота.
[0049] Блок 38 управления указателями поворота принимает ввод результатов оценки блоков 34-37 оценки, информацию о целевом маршруте и т. д. и выполняет управление, которое определяет, какой из указателей 6 поворота, указывающих левое и правое направления, должен светиться, и какой не должен светиться. Отсутствие свечения ни одного из указателей 6 поворота, указывающих левое и правое направления, соответствует состоянию, в котором как указатель левого поворота, так и указатель правого поворота погашены.
[0050] Когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением, и блок 34 оценки прибытия к первой области свечения оценивает, что рассматриваемое транспортное средство прибыло к первой области свечения, блок 38 управления указателями поворота выполняет управление, которое определяет направление, которое должно быть указано указателями 6 поворота в соответствии с оценкой взаимного расположения блока 36 оценки взаимного расположения. Затем блок 38 управления указателями поворота выводит определенное направление, указываемое указателями 6 поворота, в качестве информации указателей поворота в блок 4 управления автономным движением. Блок 38 управления указателями поворота также выводит определение того, что ни один из указателей 6 поворота, указывающих левое и правое направления, не будет светиться в качестве информации указателей поворота в блок 4 управления автономным движением.
[0051] От въезда рассматриваемого транспортного средства до тех пор, пока рассматриваемое транспортное средство не выезжает с перекрестка с круговым движением, блок 38 управления указателями поворота последовательно сравнивает текущее взаимное расположение между текущим местоположением рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства и оценивает, выполнено ли условие переключения для переключения направления, указываемого указателями 6 поворота. Кроме того, когда условие переключения выполнено, блок 38 управления указателями поворота переключает направление, указываемое указателями 6 поворота, на основе условия переключения. Затем блок 38 управления указателями поворота выводит переключаемое направление, указываемое указателями 6 поворота, в качестве информации указателей поворота в блок 4 управления автономным движением.
[0052] В следующих двух ситуациях блок 38 управления указателями поворота гасит указатель левого поворота после того, как рассматриваемое транспортное средство въехало на перекресток с круговым движением. Во-первых, направление, указываемое фонарем указателя поворота, когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением, противоположно направлению кругового движения, когда рассматриваемое транспортное средство проезжает по перекрестку с круговым движением. Во-вторых, выезд рассматриваемого транспортного средства является выездом после первого выезда после въезда на перекресток с круговым движением.
[0053] Когда рассматриваемое транспортное средство выезжает с перекрестка с круговым движением и блок 35 оценки прибытия ко второй области свечения оценивает, что рассматриваемое транспортное средство прибыло ко второй области свечения, блок 38 управления указателями поворота выполняет управление, которое определяет включить указатель поворота 6, который указывает, что рассматриваемое транспортное средство выезжает с перекрестка с круговым движением. Направление указателя поворота 6, которое указывает, что рассматриваемое транспортное средство выезжает с перекрестка с круговым движением, то есть направление, указываемое светящимся в конце указателем поворота 6, противоположно направлению кругового движения, когда рассматриваемое транспортное средство проезжает по перекрестку с круговым движением. Блок 38 управления указателями поворота выводит направление, указываемое определенным указателем 6 поворота, в качестве информации указателей поворота в блок 4 управления автономным движением.
[0054] Когда блок 37 оценки выезда с перекрестка с круговым движением оценивает, что рассматриваемое транспортное средство выехало с перекрестка с круговым движением, блок 38 управления указателями поворота выполняет управление, которое определяет погасить указатель 6 поворота. Затем блок 38 управления указателями поворота выводит гашение указателей 6 поворота в качестве информации указателей поворота в блок 4 управления автономным вождением.
[0055] Конфигурация процесса управления помощью при вождении будет описана на основе фиг. с 3 по 11. Этапы управления процесса на фиг. 4 и 5 описаны ниже.
[0056] На этапе S1, получают необходимую информацию, зависящую от информации об окружении рассматриваемого транспортного средства, информации о местоположении рассматриваемого транспортного средства, информации картографических данных, информации о пункте назначения и т. д., генерируют целевой маршрут и т. д., и процесс переходит к этапу S2. Этап S1 соответствует блоку 31 генерации.
[0057] На этапе S2, в продолжение генерации целевого маршрута и т. д. на этапе S1, получают информацию об окружении рассматриваемого транспортного средства и информацию о местоположении рассматриваемого транспортного средства от бортового датчика 1, пока рассматриваемое транспортное средство движется, и процесс переходит на этап S3.
[0058] На этапе S3, в продолжение получения информации об окружении рассматриваемого транспортного средства и информации о местоположении рассматриваемого транспортного средства на этапе S2, выполняется оценка того, прибыло ли рассматриваемое транспортное средство к перекрестку RA с круговым движением. Когда оценкой является ДА (рассматриваемое транспортное средство прибыло к перекрестку с круговым движением), процесс переходит к этапу S4, а когда оценкой является НЕТ (рассматриваемое транспортное средство не прибыло к перекрестку с круговым движением), процесс возвращается к этапу S1. Этап S3 соответствует блоку 32 оценки прибытия к перекрестку с круговым движением.
[0059] «Прибыло ли рассматриваемое транспортное средство к перекрестку RA с круговым движением» является оценкой того, что рассматриваемое транспортное средство V прибыло к перекрестку RA с круговым движением, когда рассматриваемое транспортное средство V вошло в пределы заданного расстояния D от перекрестка RA с круговым движением. «Заданное расстояние D» является расстоянием от перекрестка RA с круговым движением до заданного местоположения 100, как показано на фиг. 3; например, заданное расстояние составляет 50 м. Вошло ли рассматриваемое транспортное средство V в пределы заданного расстояния D от перекрестка RA с круговым движением, оценивается на основе информации о местоположении рассматриваемого транспортного средства и т. д.
[0060] На этапе S4, в продолжение оценки того, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением на этапе S3, устанавливаются первая область свечения и вторая область свечения, и процесс переходит к этапу S5. Этап S4 соответствует блоку 33 установки области свечения. В частности, этап S4 соответствует блоку 33a установки первой области свечения и блоку 33b установки второй области свечения.
[0061] В этом примере «первая область A1 свечения» установлена между перекрестком RA с круговым движением и первым местоположением 101 свечения, как показано на фиг. 3. Расстояние от перекрестка RA с круговым движением до первого местоположения 101 свечения устанавливается, например, равным 30 м.
[0062] Далее будет описана «вторая область свечения» на основе фиг. с 6 по 10. Вторая область свечения изменяется в зависимости от информации картографических данных и целевого маршрута; поэтому для удобства вторая область свечения классифицируется в зависимости от того, выполняет ли рассматриваемое транспортное средство левый поворот, первый правый поворот, второй правый поворот или движется прямо.
[0063] Во-первых, в первом целевом маршруте TR1, показанном на фиг. 6, выезд EX рассматриваемого транспортного средства является первым выездом, и поэтому этот маршрут подходит для времени, когда вторая область свечения не установлена. Следовательно, вторая область свечения не установлена в первом целевом маршруте TR1.
[0064] В от второго целевого маршрута TR2, показанного на фиг. 7, до пятого целевого маршрута TR5 на фиг. 10, выезд EX рассматриваемого транспортного средства является выездом после первого выезда, и эти маршруты, следовательно, подходят для времени, когда устанавливается вторая зона свечения. Следовательно, вторая область свечения устанавливается в от второго до пятого целевых маршрутах TR2 - TR5. Вторая область свечения устанавливается на область, простирающуюся от переходного местоположения, где рассматриваемое транспортное средство проезжает выезд (соединительную проезжую часть), который непосредственно предшествует выезду EX рассматриваемого транспортного средства, до ближайшего местоположения, которое находится близко к выезду EX рассматриваемого транспортного средства (соединительной проезжей части).
[0065] Здесь будет описано «переходное местоположение». Во-первых, прямой участок соединительной проезжей части, соединенный с непосредственно предшествующим выездом (называемый ниже также «непосредственно предшествующей соединительной дорогой», продолжается до перекрестка RA с круговым движением, а две продолжающиеся линии устанавливаются на круговой проезжей части CR. Из местоположений пересечения между двумя продолжающимися линиями и целевым маршрутом рассматриваемого транспортного средства V местоположение пересечения дальше от целевого маршрута рассматриваемого транспортного средства V обозначается как переходное местоположение. Будет описано «ближайшее» местоположение. Во-первых, прямой участок соединительной проезжей части, соединенной с выездом рассматриваемого транспортного средства (именуемый ниже также «соединительной дорогой выезда рассматриваемого транспортного средства»), продолжается до перекрестка RA с круговым движением, и две продолжающиеся линии устанавливаются на круговой проезжей части CR. Из двух продолжающихся линий местоположения пересечения, где линии пересекаются с целевым маршрутом рассматриваемого транспортного средства V, обозначены как ближайшие местоположения. Другими словами, из местоположений пересечения между двумя продолжающимися линиями и целевым маршрутом рассматриваемого транспортного средства V ближайшее местоположение пересечения на целевом маршруте рассматриваемого транспортного средства V обозначается как ближайшее местоположение. Для случая, когда соединительная проезжая часть разделяется на дорогу, входящую на перекресток с круговым движением, и дорогу, выходящую из перекрестка с круговым движением, описаны только те случаи, которые отличаются от вышеуказанного. Когда непосредственно предшествующая соединительная проезжая часть разделяется, прямой участок выездной проезжей части продолжается до перекрестка RA с круговым движением, и две продолжающие линии устанавливаются на круговой проезжей части CR. Когда выезд рассматриваемого транспортного средства, соединяющий проезжую часть, разделяется, прямой участок выездной проезжей части продолжается до перекрестка RA с круговым движением, и две продолжающие линии устанавливаются на круговой проезжей части CR.
[0066] Конкретный пример переходного местоположения и ближайшего местоположения описано на основе фиг. 3. Описание, относящееся к фиг. 3, относится к случаю, в котором соединительная проезжая часть непосредственно предшествующего выезда обозначена как третья соединительная проезжая часть R3, соединительная проезжая часть выезда рассматриваемого транспортного средства обозначена как четвертая соединительная проезжая часть R4, а целевой маршрут обозначен как целевой маршрут TR. В этом случае сначала описывается переходное местоположение. Прямой участок третьей соединительной проезжей части R3 продолжается до перекрестка RA с круговым движением, а две продолжающиеся линии L11, L12 установлены на круговой проезжей части CR. Из местоположений пересечения между двумя продолжающимися линиями L11, L12 и целевым маршрутом TR рассматриваемого транспортного средства V местоположение пересечения (продолжающаяся линия L12) дальше в целевом маршруте TR рассматриваемого транспортного средства V обозначается как переходное местоположение. Далее описано ближайшее местоположение. Прямой участок четвертой соединительной проезжей части R4 продолжается до перекрестка RA с круговым движением, а две продолжающиеся линии L21, L22 установлены на круговой проезжей части CR. Из двух продолжающихся линий L21, L22 местоположение пересечения (продолжающаяся линия L21), которая пересекает целевой маршрут TR транспортного средства V, обозначается как ближайшее местоположение. Целевой маршрут TR не пересекает продолжающуюся линию L22, как показано на фиг. 3. Описаны каждая из вторых областей свечения в со второго целевого маршрута TR2, показанного на фиг. 7, по пятый целевой маршрут TR5 на фиг. 10.
[0067] Во-первых, во втором целевом маршруте TR2, показанном на фиг. 7, устанавливается вторая область A2 свечения для левого поворота (область, заполненная точками). На основе второго целевого маршрута TR2, показанного на фиг. 7, вторая область A2 свечения для левого поворота устанавливается от второго переходного местоположения 202, где рассматриваемое транспортное средство V проезжает вторую соединительную проезжую часть R2, непосредственно предшествующую выезду EX рассматриваемого транспортного средства, до третьего ближайшего местоположения 300, которое находится рядом с третьей соединительной проезжей частью R3 выезда EX рассматриваемого транспортного средства.
[0068] Затем в третьем целевом маршруте TR3, показанном на фиг. 8, устанавливается вторая область A3 свечения для первого правого поворота (область, заполненная точками). В третьем целевом маршруте TR3, показанном на фиг. 8, четвертая соединительная проезжая часть R4, непосредственно предшествующая выезду EX рассматриваемого транспортного средства, является дорогой с односторонним движением, где транспортные средства въезжают только на четвертую соединительную проезжую часть R4 с перекрестка RA с круговым движением. На основе третьего целевого маршрута TR3, показанного на фиг. 8, вторая область A3 свечения для первого правого поворота устанавливается от четвертого переходного местоположения 402, где рассматриваемое транспортное средство V проезжает четвертую соединительную проезжую часть R4, непосредственно предшествующую выезду EX рассматриваемого транспортного средства, до пятого ближайшего местоположения 500, которое находится рядом с пятой соединительной проезжей частью R5 выезда EX рассматриваемого транспортного средства.
[0069] Затем, в четвертом целевом маршруте TR4, показанном на фиг. 9, устанавливается вторая область A4 свечения для второго правого поворота (область, заполненная точками). В четвертом целевом маршруте TR4, показанном на фиг. 9, четвертая соединительная проезжая часть R4, непосредственно предшествующая выезду EX рассматриваемого транспортного средства, имеет четвертую въездную проезжую часть R41 и четвертую выездную проезжую часть R42. В этом примере четвертая въездная проезжая часть R41 является дорогой, по которой транспортные средства въезжают на перекресток RA с круговым движением с четвертой соединительной проезжей части R4. Четвертая выездная проезжая часть R42 является дорогой, по которой транспортные средства выезжают с перекрестка RA с круговым движением на четвертую соединительную проезжую часть R4. Следовательно, четвертая въездная проезжая часть R41 является дорогой, по которой другие транспортные средства могут въезжать на перекресток RA с круговым движением с четвертой въездной проезжей части R41. На основе четвертого целевого маршрута TR4, показанного на фиг. 9, вторая область A4 свечения для второго правого поворота устанавливается от четвертого разделительного местоположения 401 (переходного местоположения), где рассматриваемое транспортное средство V проезжает четвертую выездную проезжую часть R42, непосредственно предшествующую выезду EX рассматриваемого транспортного средства, до пятого ближайшего местоположения 500, которое находится рядом с пятой соединительной проезжей частью R5 выезда EX рассматриваемого транспортного средства.
[0070] Затем в пятом целевом маршруте TR5, показанном на фиг. 10, устанавливается вторая область A5 свечения для движения прямо (область, заполненная точками). На основе пятого целевого маршрута TR5, показанного на фиг. 10, вторая область свечения A5 для движения прямо устанавливается от третьего переходного местоположения 302, где рассматриваемое транспортное средство V проезжает третью соединительную проезжую часть R3, непосредственно предшествующую выезду EX рассматриваемого транспортного средства, до четвертого ближайшего местоположения 400, которое находится рядом с четвертой соединительной проезжей частью R4 выезда EX рассматриваемого транспортного средства.
[0071] Вторая область свечения также устанавливается аналогичным образом, когда соединительная проезжая часть, соединенная с выездом EX рассматриваемого транспортного средства, является шестой соединительной проезжей частью R6 или первой выездной проезжей частью R12.
[0072] На этапе S5, в продолжение установки первой области A1 свечения и вторых областей A2-A5 свечения на этапе S4, выполняется оценка того, прибыло ли рассматриваемое транспортное средство V к первой области А1 свечения. Когда оценкой является ДА (рассматриваемое транспортное средство прибыло к первой области A1 свечения), процесс переходит на этап S6, а когда оценкой является НЕТ (рассматриваемое транспортное средство не прибыло к первой области A1 свечения), последовательность этапа S5 повторяется. Этап S5 соответствует блоку 34 оценки прибытия к первой области свечения.
[0073] В этом примере, «прибыло ли рассматриваемое транспортное средство V к первой области A1 свечения», оценивается согласно соотношению расстояний проезда. В частности, «прибыло ли рассматриваемое транспортное средство V к первой области A1 свечения» оценивается согласно соотношению между заданным расстоянием D (50 м) и расстоянием проезда (переменным) от заданного местоположения 100 до местоположения рассматриваемого транспортного средства (см. фиг. 3). Например, когда соотношение расстояний проезда составляет от 0,4 до 1,0 (включительно), оценивается, что рассматриваемое транспортное средство V прибыло к первой области A1 свечения.
[0074] На этапе S6, в продолжение оценки того, что рассматриваемое транспортное средство прибыло к первой области A1 свечения на этапе S5, взаимное расположение между въездом EN рассматриваемого транспортного средства и выездом EX рассматриваемого транспортного средства на перекрестке RA с круговым движением оценивается на основе информации о целевом маршруте. Затем на этапе S6 выполняется оценка того, является ли взаимное расположение въезда и выезда условием для свечения указателя поворота. Когда оценкой является ДА (условие свечения указателя левого поворота выполняется), процесс переходит к этапу S11, а когда оценкой является НЕТ (условие свечения указателя левого поворота не выполняется), процесс переходит к этапу S7. Условие свечения (включения) указателя левого поворота описано ниже. Кроме того, этап S6 соответствует блоку 36 оценки взаимного расположения.
[0075] На этапе S7, в продолжение оценки того, что условие свечения указателя левого поворота не выполняется на этапе S6, взаимное расположение между въездом EN рассматриваемого транспортного средства и выездом EX рассматриваемого транспортного средства на перекрестке RA с круговым движением оценивается на основе информация о целевом маршруте. Затем на этапе S7 выполняется оценка того, является ли взаимное расположение въезда и выезда условием для включения указателя правого поворота. Когда оценкой является ДА (условие свечения указателя правого поворота выполняется), процесс переходит к этапу S31, а когда оценкой является НЕТ (условие свечения указателя правого поворота не выполняется), процесс переходит к этапу S41. Этап S7 соответствует блоку 36 оценки взаимного расположения.
[0076] В этом примере оценка взаимного расположения въезда EN рассматриваемого транспортного средства и выезда EX рассматриваемого транспортного средства на этапе S6 и этапе S7 описано на основе фиг. 11. Взаимное расположение оценивается по относительному углу θ между въездом EN рассматриваемого транспортного средства и выездом EX рассматриваемого транспортного средства. Относительный угол θ описывается с точки зрения перекрестка RA с круговым движением, в котором шесть дорог R1-R6 соединены с круговой проезжей частью CR, как показано на фиг. 11. Относительный угол θ вычисляется из местоположений въезда EN рассматриваемого транспортного средства и выезда EX рассматриваемого транспортного средства, если смотреть из центра CE перекрестка RA с круговым движением. Когда весь выезд рассматриваемого транспортного средства (границы круговой пунктирной линии L1 и соединительной проезжей части) находится в пределах относительного угла θ, взаимное расположение соответствует следующим условиям. Таким образом, въезд рассматриваемого транспортного средства обозначается как нулевой градус. В описании, относящемся к фиг. 11, первая въездная проезжая часть R11, которая является въездом EN рассматриваемого транспортного средства, находится у нулевого градуса.
[0077] Когда относительный угол θ больше нуля градусов и равен или меньше первого угла θ 1 (например, 144 градусов), взаимное расположение въезда и выезда соответствует условию для свечения указателя левого поворота. На фиг. 11, когда соединительная проезжая часть, соединенная с выездом EX рассматриваемого транспортного средства, является второй соединительной проезжей частью R2 или третьей соединительной проезжей частью R3, взаимное расположение соответствует условию для свечения указателя левого поворота. В это время оценивается выполнение условия свечения указателя левого поворота на этапе S6.
[0078] Когда относительный угол θ больше, чем первый угол θ 1, и равен или меньше второго угла θ 2 (например, 216 градусов), взаимное расположение въезда и выезда соответствует условию для несвечения ни одного из указателей 6 поворота, указывающих левое и правое направления. На фиг. 11, когда соединительная проезжая часть, соединенная с выездом EX рассматриваемого транспортного средства, является четвертой соединительной проезжей частью R4, взаимное расположение соответствует условию для несвечения ни одного из указателей 6 поворота, указывающих левое и правое направления. В это время условие свечения указателя левого поворота оценивается как невыполненное на этапе S6, а условие свечения сигнала правого поворота оценивается как невыполненное на этапе S7. Когда, например, это третья соединительная проезжая часть R3, которая соединяется с выездом EX рассматриваемого транспортного средства, и участок выезда EX рассматриваемого транспортного средства в это время находится в диапазоне «θ 1 < относительный угол ≤ θ 2», третья соединительная проезжая часть R3 соответствует условию для несвечения ни одного из указателей 6 поворота, указывающих левое и правое направления.
[0079] Когда относительный угол θ больше второго угла θ 2 и равен или меньше третьего угла θ 3 (например, 360 градусов), взаимное расположение въезда и выезда соответствует условию для свечения указателя правого поворота. На фиг. 11, когда соединительная проезжая часть, соединенная с выездом EX рассматриваемого транспортного средства, является пятой соединительной проезжей частью R5, шестой соединительной проезжей частью R6 или первой выездной проезжей частью R12, взаимное расположение соответствует условию для несвечения ни одного из указателей 6 поворота, указывающих левое и правое направления. В это время условие свечения указателя левого поворота оценивается как невыполненное на этапе S6, а условие свечения сигнала правого поворота оценивается как выполненное на этапе S7. Время, «когда выезд EX рассматриваемого транспортного средства является первой выездной проезжей частью R12», соответствует времени, когда рассматриваемое транспортное средство V полностью разворачивается. Когда, например, это четвертая соединительная проезжая часть R4, которая соединена с выездом EX рассматриваемого транспортного средства, и участок выезда EX рассматриваемого транспортного средства в это время находится в диапазоне «θ 2 < относительный угол ≤ θ 3», четвертая соединительная проезжая часть R4 соответствует условию для свечения указателя правого поворота.
[0080] На этапе S11, в продолжение оценки того, что условие свечения указателя левого поворота выполняется на этапе S6, выполняется управление, которое определяет включение (свечение) указателя левого поворота, и процесс переходит к этапу S12. Таким образом, указатель левого поворота включается из состояния погашенного указателя поворота. Термин «состояние погашенного указателя поворота» относится к состоянию, в котором ни один из указателей 6 поворота, указывающих левое и правое направления, не светится. Этапы S11, S16, S20, S21, S24, S31, S33 и S41 соответствуют блоку 38 управления указателями поворота.
[0081] На этапе S12, в продолжение определения свечения указателя левого поворота на этапе S11, взаимное расположение въезда EN рассматриваемого транспортного средства и выезда EX рассматриваемого транспортного средства на перекрестке с круговым движением оценивается на основе информации о целевом маршруте, и оценивается, является ли взаимное расположение въезда и выезда смежным расположением. Когда оценкой является ДА (смежное расположение), процесс переходит к этапу S1, а когда оценкой является НЕТ (несмежное расположение), процесс переходит к этапу S20. Этап S12 соответствует блоку 36 оценки взаимного расположения.
[0082] Фраза «взаимное расположение выезда и въезда является смежным расположением» относится ко времени, когда, например, на фиг. 11, въезд EN рассматриваемого транспортного средства является первой соединительной проезжей частью R1 и соединительная проезжая часть, соединенная с выездом EX рассматриваемого транспортного средства является второй соединительной проезжей частью R2. Другими словами, когда рассматриваемое транспортное средство V движется, как показано на фиг. 6, взаимное расположение выезда и въезда оценивается как смежное расположение. Из-за того, что оценка этапа S6 является отрицательной, когда въезд EN рассматриваемого транспортного средства является первой въездной проезжей частью R11, а соединительная проезжая часть, соединенная с выездом EX рассматриваемого транспортного средства, является шестой соединительной проезжей частью R6 или первой выездной проезжей частью R12 на фиг. 11, взаимное расположение въезда и выезда не оценивается как смежное расположение.
[0083] На этапе S15, в продолжение оценки того, что взаимное расположение является смежным расположением на этапе S12, оценивается, выехало ли рассматриваемое транспортное средство V с перекрестка RA с круговым движением. Когда оценкой является ДА (рассматриваемое транспортное средство выехало), процесс переходит к этапу S16, а когда оценкой является НЕТ (рассматриваемое транспортное средство не выехало), этап S15 повторяется. Этап S15 соответствует блоку 37 оценки выезда с перекрестка с круговым движением.
[0084] В этом примере, «выехало ли рассматриваемое транспортное средство V с перекрестка RA с круговым движением» оценивается на этапе S15 как рассматриваемое транспортное средство, выехавшее, когда рассматриваемое транспортное средство V выехало с перекрестка RA с круговым движением, например, на фиг. 6. Выехало ли рассматриваемое транспортное средство V с перекрестка RA с круговым движением оценивается на основании информации о местоположении рассматриваемого транспортного средства и т. д.
[0085] На этапе S16, в продолжение оценки того, что рассматриваемое транспортное средство выехало на этапе S15 и этапе S25, выполняется управление, которое определяет погасить указатель левого поворота, и процесс переходит на КОНЕЦ. Таким образом, указатель левого поворота гасят, приводя в состояние погашенного указателя поворота.
[0086] На этапе S20, в продолжение оценки того, что взаимное расположение не является смежным расположением на этапе S12, оценивается, въехало ли рассматриваемое транспортное средство на круговую проезжую часть CR. Когда оценкой является ДА (выезд на круговую проезжую часть), процесс переходит к этапу S21, а когда оценкой является НЕТ (невыезд на круговую проезжую часть), этап S20 повторяется.
[0087] В этом примере, «въехало ли рассматриваемое транспортное средство V на круговую проезжую часть CR» оценивается как рассматриваемое транспортное средство V, въехавшее на круговую проезжую часть CR, когда рассматриваемое транспортное средство V проезжает через въезд EN рассматриваемого транспортного средства и въезжает на круговую проезжую часть CR. Въехало ли рассматриваемое транспортное средство V на круговую проезжую часть CR оценивается на основе информации о местоположении рассматриваемого транспортного средства и т. д.
[0088] На этапе S21, в продолжение оценки того, что рассматриваемое транспортное средство V въехало на круговую проезжую часть CR на этапе S20, выполняется управление, которое определяет погасить указатель левого поворота, и процесс переходит к этапу S22. Таким образом, указатель левого поворота гасят, приводя в состояние погашенного указателя поворота.
[0089] На этапе S22, в продолжение определения погасить сигнал левого поворота на этапе S21, оценивается, прибыло ли рассматриваемое транспортное средство V ко второй области A2 свечения для левого поворота, пока рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (см. фиг. 7). Когда оценкой является ДА (прибыло ко второй области А2 свечения), процесс переходит к этапу S24, а когда оценкой является НЕТ (не прибыло ко второй области А2 свечения, этап S22 повторяется. Этап S22 соответствует блоку 35 оценки прибытия ко второй области свечения.
[0090] В этом примере, «прибыло ли рассматриваемое транспортное средство V ко второй области A2 свечения для левого поворота», оценивается согласно соотношению расстояний проезда. В частности, «прибыло ли рассматриваемое транспортное средство V ко второй области А2 свечения для левого поворота» оценивается согласно соотношению между расстоянием проезда от первого местоположения 101 свечения до выезда EX рассматриваемого транспортного средства и расстоянием проезда (переменное) от первого местоположения 101 свечения до местоположения рассматриваемого транспортного средства (см. фиг. 7). Например, когда соотношение расстояний проезда составляет от 0,8 до 1,0 (включительно), оценивается, что рассматриваемое транспортное средство V прибыло ко второй области A2 свечения для левого поворота.
[0091] На этапе S24, в продолжение оценки того, что рассматриваемое транспортное средство прибыло ко второй области A2 свечения на этапе S22 или ко второй области A5 свечения на этапе S42, или определения погасить указатель правого поворота на этапе S33, выполняется управление, которое определяет включить указатель левого поворота, и процесс переходит к этапу S25. Таким образом, указатель левого поворота включается из состояния погашенного указателя поворота.
[0092] На этапе S25, в продолжение определения включить указатель левого поворота на этапе S24, выполняется оценка того, выехало ли рассматриваемое транспортное средство V с перекрестка RA с круговым движением. Когда оценкой является ДА (рассматриваемое транспортное средство выехало), процесс переходит к этапу S16, а когда оценкой является НЕТ (рассматриваемое транспортное средство не выехало), этап S25 повторяется. Этап S25, как и этап S15, соответствует блоку 37 оценки выезда с перекрестка с круговым движением.
[0093] В этом примере, «выехало ли рассматриваемое транспортное средство V с перекрестка RA с круговым движением» оценивается на этапе S25 как рассматриваемое транспортное средство, выехавшее, когда рассматриваемое транспортное средство V выехало с перекрестка RA с круговым движением, например, на фиг. с 7 по 10. Выехало ли рассматриваемое транспортное средство V с перекрестка RA с круговым движением оценивается на основании информации о местоположении рассматриваемого транспортного средства и т. д.
[0094] На этапе S31, в продолжение оценки того, что условие свечения указателя правого поворота выполняется на этапе S7, выполняется управление, которое определяет включить указатель правого поворота, и процесс переходит к этапу S32. Таким образом, указатель правого поворота включается из состояния погашенного указателя поворота.
[0095] На этапе S32, в продолжение определения включения указателя правого поворота на этапе S31, выполняется оценка того, прибыло ли рассматриваемое транспортное средство V ко второй области A3 свечения для первого правого поворота или второй области A4 для второго правого поворота, когда рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (см. фиг. 8 или 9). Когда оценкой является ДА (прибыло ко второй области A3/A4 свечения), процесс переходит на этап S33, а когда оценкой является НЕТ (не прибыло ко второй области A3/A4 свечения), этап S32 повторяется. Этап S32 соответствует блоку 35 оценки прибытия ко второй области свечения.
[0096] В этом примере, «прибыло ли рассматриваемое транспортное средство V ко второй области A3 свечения для первого правого поворота или второй области A4 свечения для второго правого поворота» оценивается согласно соотношению расстояний проезда. Способ оценки согласно соотношению расстояний проезда аналогичен S22 и поэтому не описывается (см. фиг. 8 или 9).
[0097] На этапе S33, в продолжение оценки того, что рассматриваемое транспортное средство прибыло ко второй области A3/A4 свечения на этапе S32, выполняется управление, которое определяет погасить сигнал правого поворота, и процесс переходит к этапу S24. Таким образом, указатель правого поворота гасят, приводя в состояние погашенного указателя поворота.
[0098] На этапе S41, в продолжение оценки того, что условие свечения указателя правого поворота не выполняется на этапе S7, выполняется управление, которое определяет не включать ни один из указателей 6 поворота, указывающих левое и правое направления, и процесс переходит на этап S42. При этом ни один из указателей 6 поворота, указывающих левое и правое направления, не светится.
[0099] На этапе S42, в продолжение определения не включать указатели 6 поворота на этапе S41, выполняется оценка того, прибыло ли рассматриваемое транспортное средство V ко второй области A5 свечения для движения прямо, в то время как рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (см. фиг. 10). Когда оценкой является ДА (прибыло ко второй области A5 свечения), процесс переходит к этапу S24, а когда оценкой является НЕТ (не прибыло ко второй области A5 свечения), этап S42 повторяется, этап S42 соответствует блоку 35 оценки прибытия ко второй области свечения.
[0100] В этом примере, «прибыло ли рассматриваемое транспортное средство V ко второй области A5 свечения для движения прямо», оценивается согласно соотношению расстояний проезда. Способ оценки согласно соотношению расстояний проезда аналогичен S22 и поэтому не описывается (см. фиг. 10).
[0101] Действие первого варианта осуществления будет описано далее как «действие управления помощью при вождении» на основе фиг. 3-11.
[0102] Описание действия по управлению помощью при вождении разделено ниже на «действие управления помощью при вождении для первого целевого маршрута TR1», «действие управления помощью при вождении для второго целевого маршрута TR2», «действие управления помощью при вождении для третьего целевого маршрута TR3, «действие по управлению помощью для четвертого целевого маршрута TR4» и «действие управления помощью при вождении для пятого целевого маршрута TR5».
[0103] Сначала описывается действие управления помощью при вождении для первого целевого маршрута TR1.
[0104] Процесс управления по фиг. 4 запускается, целевой маршрут и т. д. генерируется на S1, информация об окружении рассматриваемого транспортного средства получают на S2, и процесс переходит с S2 на S3. Если оценка прибытия к перекрестку с круговым движением на S3 положительная, процесс переходит с S3 на S4. Первая область A1 свечения устанавливается на S4, и процесс переходит с S4 на S5. В первом целевом маршруте TR1 вторая область свечения не устанавливается на S4. На этапе S5 оценка прибытия к первой области свечения отрицательная через некоторое время. Если оценка прибытия к первой области свечения на S5 положительная, процесс переходит с S5 на S6. На этапе S6 оценка выполнения условия для свечения указателя левого поворота является положительной, и процесс переходит с S6 на S11. Указатель левого поворота светится на S11, и процесс переходит с S11 на S12. Оценка смежного расположения является положительной на этапе S12, и процесс переходит с S12 на S15. На этапе S15 оценка выезда рассматриваемого транспортного средства является отрицательной через некоторое время. Когда оценка выезда рассматриваемого транспортного средства на S15 отрицательная, процесс переходит с S15 на S16. На этапе S16 указатель левого поворота гаснет, и процесс переходит с S16 на КОНЕЦ.
[0105] Далее описывается работа рассматриваемого транспортного средства V, движущегося по первому целевому маршруту TR1, на основе фиг. 6.
[0106] До момента времени t11 рассматриваемое транспортное средство V не прибыло к перекрестку RA с круговым движением. Период до момента времени t11 соответствует последовательности операций, повторяемой в последовательности S1, S2 и «НЕТ» на S3 на фиг. 4.
[0107] В момент времени t11 рассматриваемое транспортное средство V прибывает к перекрестку RA с круговым движением, и устанавливается первая область A1 свечения, и с момента времени t11 до момента времени t12 рассматриваемое транспортное средство V не прибыло к первой области A1 свечения. Вторая область свечения не устанавливается в первом целевом маршруте TR1. Момент времени t11 соответствует последовательности операций, включающей вариант «ДА» в S3 и ведущей к S4 и S5 на фиг. 4, а период от момента времени t11 до момента времени t12 соответствует последовательности операций, в которой вариант «НЕТ» в S5 на фиг. 4 принимается повторно.
[0108] В момент времени t12 рассматриваемое транспортное средство V прибывает к первой области A1 свечения, и условие свечения указателя левого поворота выполняется. Следовательно, состояние указателей поворота переключается из состояния погашенного указателя поворота на свечение указателя левого поворота. В первом целевом маршруте TR1 взаимное расположение въезда и выезда является смежным расположением. Момент времени t12 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S5 на фиг. 4, вариант «ДА» на этапе S6 и варианты «ДА» на этапах S11 и S12 на фиг. 5 и ведущей на этап S15.
[0109] В момент времени t13 рассматриваемое транспортное средство V прибыло к въезду EN рассматриваемого транспортного средства и собирается выехать на круговую проезжую часть CR. С момента времени t13 до момента времени t16 рассматриваемое транспортное средство V движется по круговой проезжей части CR. Период от момента времени t12 до момента времени t16 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S15 на фиг. 5.
[0110] В момент времени t16 рассматриваемое транспортное средство V прошло через выезд EX рассматриваемого транспортного средства, выехало с перекрестка RA с круговым движением и полностью въехало на вторую соединительную проезжую часть R2. Следовательно, состояние указателей поворота переключается со свечения указателя левого поворота на состояние погашенного указателя поворота. Момент времени t16 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S15 на фиг. 5 и ведущей на S16 и КОНЕЦ.
[0111] Когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением, план действий рассматриваемого транспортного средства может, таким образом, сообщаться посредством свечения указателя левого поворота другим транспортным средствам V1, V2 в окружении рассматриваемого транспортного средства. Кроме того, с момента времени въезда рассматриваемого транспортного средства через въезд EN рассматриваемого транспортного средства до тех пор, пока рассматриваемое транспортное средство V не покинет перекресток RA с круговым движением, план действий, указывающий, что рассматриваемое транспортное средство V будет поворачивать на вторую соединительную проезжую часть R2, может быть сообщен другому транспортному средству V2 в частности в окружении основного транспортного средства, продолжая выполнять свечение указателя левого поворота. Другими словами, из-за того, что свечение указателя левого поворота продолжается, другое транспортное средство V2 может быть подготовлено к движению рассматриваемого транспортного средства V с перекрестка RA с круговым движением на вторую соединительную проезжую часть R2 (выезд рассматриваемого транспортного средства V с перекрестка RA с круговым движением).
[0112] Другое транспортное средство V1 представляет сзади идущее транспортное средство, в то время как рассматриваемое транспортное средство V движется по первой въездной проезжей части R11. Другое транспортное средство V2 представляет собой транспортное средство, движущееся по круговой проезжей части CR, когда рассматриваемое транспортное средство V въезжает на круговую проезжую часть CR, а также представляет сзади идущее транспортное средство, когда рассматриваемое транспортное средство V движется по круговой проезжей части CR.
[0113] Далее описывается действие управления помощью при вождении для второго целевого маршрута TR2. Последовательность операций от начала процесса управления на фиг. 4 до S12 на фиг. 5 и последовательность операций, выполняемая от S16 до КОНЕЦ, такие же, как и для действия управления помощью при вождении для первого целевого маршрута TR1, и поэтому не описываются. Для второго целевого маршрута TR2 на этапе S4 устанавливают вторую область A2 свечения для левого поворота, которая отличается от S4 для первого целевого маршрута TR1.
[0114] Оценка смежного расположения отрицательная на S12, и процесс переходит с S12 на S20. На S20 оценка въезда на круговую проезжую часть через некоторое время отрицательная. Если оценка въезда на круговую проезжую часть на S20 положительная, процесс переходит с S20 на S21. Указатель левого поворота гасят на S21, и процесс переходит с S21 на S22. На S22 оценка прибытия ко второй области свечения для левого поворота отрицательная. Когда оценка прибытия ко второй области свечения для левого поворота на S22 является положительной, процесс переходит с S22 на S24. Указатель левого поворота светится на S24, и процесс переходит с S24 на S25. На этапе S25 оценка выезда рассматриваемого транспортного средства является отрицательной через некоторое время. Когда оценка выезда рассматриваемого транспортного средства на S25 отрицательная, процесс переходит с S25 на S16.
[0115] Далее описывается работа рассматриваемого транспортного средства V, движущегося по второму целевому маршруту TR2, на основе фиг. 7. Период до момента времени t22 на фиг. 7 такой же, как период до момента времени t12 на фиг. 6, и поэтому не описывается. Для второго целевого маршрута TR2 вторая область A2 свечения для левого поворота устанавливается в момент времени t21, который отличается от времени t11 для первого целевого маршрута TR1.
[0116] В момент времени t22 рассматриваемое транспортное средство V прибывает к первой области A1 свечения, и условие свечения указателя левого поворота выполняется. Следовательно, состояние указателей поворота переключается из состояния погашенного указателя поворота на свечение указателя левого поворота. Взаимное расположение въезда и выезда не является смежным расположением во втором целевом маршруте TR2. Момент времени t22 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S5 на фиг. 4, вариант «ДА» на этапе S6 на фиг. 5 и варианты «НЕТ» на этапах S11 и S12 и ведущей на этап S20.
[0117] Момент времени t23 является моментом времени, когда рассматриваемое транспортное средство V прибыло к въезду EN рассматриваемого транспортного средства и собирается въехать на круговую проезжую часть CR. Период от момента времени t22 до момента времени t24 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S20 на фиг. 5. С момента времени t23 до момента времени t26 рассматриваемое транспортное средство V движется по круговой проезжей части CR.
[0118] В момент времени t24 рассматриваемое транспортное средство V въезжает на круговую проезжую часть CR. Следовательно, состояние указателей поворота переключается со свечения указателя левого поворота на состояние погашенного указателя поворота. С момента времени 24 до момента времени t25 указатель левого поворота остается погашенным, и рассматриваемое транспортное средство V не прибыло ко второй области A2 свечения для левого поворота. Момент времени t24 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S20 на фиг. 5 и ведущей на S21 и S22. Период от момента времени t24 до момента времени t25 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S22 на фиг. 5.
[0119] В момент времени t25 рассматриваемое транспортное средство V прибывает ко второй области A2 свечения для левого поворота. Следовательно, состояние указателей поворота переключается из состояния погашенного указателя поворота на свечение указателя левого поворота. Момент времени t25 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S22 на фиг. 5 и ведущей на S24 и S25. Период от момента времени t25 до момента времени t26 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S25 на фиг. 5.
[0120] В момент времени t26 рассматриваемое транспортное средство V прошло через выезд EX рассматриваемого транспортного средства, чтобы выехать с перекрестка RA с круговым движением, и въезд на третью соединительную проезжую часть R3 завершен. Следовательно, состояние указателей поворота переключается со свечения указателя левого поворота на состояние погашенного указателя поворота. Момент времени t26 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S25 на фиг. 5 и ведущей на S16 и КОНЕЦ.
[0121] План действий рассматриваемого транспортного средства может, таким образом, сообщаться другим транспортным средствам V1, V2 в окрестностях рассматриваемого транспортного средства посредством свечения указателя левого поворота, когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением. Кроме того, после того, как рассматриваемое транспортное средство V въехало на круговую проезжую часть CR, указатель левого поворота остается погашенным до тех пор, пока рассматриваемое транспортное средство не прибудет ко второй области A2 свечения для левого поворота (пока рассматриваемое транспортное средство V движется по круговой проезжей части CR). План действий, в котором рассматриваемое транспортное средство V не поворачивает на вторую соединительную проезжую часть R2, может, таким образом, быть сообщен другому транспортному средству V2, в частности, в окрестностях рассматриваемого транспортного средства. Кроме того, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, план действий, в котором рассматриваемое транспортное средство V поворачивает на третью соединительную проезжую часть R3, может быть сообщен посредством свечения указателя левого поворота другому транспортному средству V2, в частности, в окрестностях рассматриваемого транспортного средства, когда транспортное средство V прибывает ко второй области A2 свечения для левого поворота. Другими словами, повторное включение указателя левого поворота позволяет другому транспортному средству V2 подготовиться к движению рассматриваемого транспортного средства V с перекрестка RA с круговым движением на третью соединительную проезжую часть R3 (выезд рассматриваемого транспортного средства V с перекрестка RA с круговым движением). Эти другие транспортные средства V1, V2 аналогичны другим транспортным средствам V1, V2 в действии управления помощью при вождении для первого целевого маршрута TR1 и поэтому не описываются.
[0122] Далее будет описано действие управления помощью при вождении для третьего целевого маршрута TR3. Последовательность операций, начинающаяся с начала процесса управления на фиг. 4 и ведущая к этапу S6 на фиг. 5, и последовательность операций, переходящая от S24 на КОНЕЦ, аналогичны операциям для действия управления помощью при вождении для второго целевого маршрута TR2 и поэтому не описаны. Для третьего целевого маршрута TR3 на этапе S4 устанавливается вторая область A3 свечения для первого правого поворота, который отличается от S4 для второго целевого маршрута TR2.
[0123] На S6 оценка выполнения условия для свечения указателя левого поворота является отрицательной, и процесс переходит с S6 на S7. На S7 оценка выполнения условия для свечения указателя правого поворота является положительной, и процесс переходит от S7 к S31. На S31 включается указатель правого поворота, и процесс переходит с S31 на S32. На S32 оценка прибытия ко второй области свечения для первого правого поворота является отрицательной через некоторое время. Когда оценка прибытия ко второй области свечения для первого правого поворота на S32 является положительной, процесс переходит с S32 на S33. На S33 указатель правого поворота гаснет, и процесс переходит с S33 на S24.
[0124] Далее описывается работа рассматриваемого транспортного средства V, движущегося по третьему целевому маршруту TR3, на основе фиг. 8. Период до момента времени t32 на фиг. 8 аналогичен периоду до момента времени t22 на фиг. 7 и поэтому не описывается. Для третьего целевого маршрута TR3 вторая область A3 свечения для первого правого поворота устанавливается в момент времени t31, который отличается от момента времени t21 для второго целевого маршрута TR2.
[0125] В момент времени t32 рассматриваемое транспортное средство V прибывает к первой области A1 свечения, условие свечения указателя левого поворота не выполняется, а условие свечения указателя поворота правого выполняется. Следовательно, состояние указателей поворота переключается из состояния погашенного указателя поворота на свечение указателя правого поворота. Момент времени t32 соответствует последовательности операций, включающей в себя вариант «ДА» в S5 на фиг. 4 и вариант «НЕТ» в S6 и вариант «ДА» в S7 на фиг. 5, и ведущей к этапам S31 и S32.
[0126] Момент времени t33 является моментом времени, когда рассматриваемое транспортное средство V прибыло к въезду EN рассматриваемого транспортного средства и собирается въехать на круговую проезжую часть CR. От момента времени t32 до момента времени t35, указатель правого поворота остается включенным, и рассматриваемое транспортное средство V не прибыло ко второй области A3 свечения для первого правого поворота. С момента времени t33 до момента времени t36 рассматриваемое транспортное средство V движется по круговой проезжей части CR. Период от момента времени t32 до момента времени t35 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S32 на фиг. 5.
[0127] В момент времени t35 рассматриваемое транспортное средство V прибывает ко второй области A3 свечения для первого правого поворота. Следовательно, состояние указателей поворота переключается со свечения указателя правого поворота на состояние погашенного указателя поворота и с состояние погашенного указателя поворота на свечение указателя левого поворота. В частности, свечение переключается с указателя правого поворота на указатель левого поворота. Момент времени t35 соответствует последовательности операций, включающей в себя «ДА» на этапе S32 на фиг. 5 и ведущей на S33, S24 и S25. Период от момента времени t35 до момента времени t36 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S25 на фиг. 5.
[0128] В момент времени t36 рассматриваемое транспортное средство V прошло через выезд EX рассматриваемого транспортного средства, чтобы выехать с перекрестка RA с круговым движением, и въезд на пятую соединительную проезжую часть R5 завершен. Следовательно, состояние указателей поворота переключается со свечения указателя левого поворота на состояние погашенного указателя поворота. Момент времени t36 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S25 на фиг. 5 и ведущей на S16 и КОНЕЦ.
[0129] План действий рассматриваемого транспортного средства, таким образом, может быть сообщен посредством свечения указателя правого поворота другим транспортным средствам V1, V2 в окрестностях рассматриваемого транспортного средства, когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением. Кроме того, пока рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (круговой проезжей части CR) и до тех пор, пока рассматриваемое транспортное средство V не прибудет ко второй области A3 свечения для первого правого поворота, указатель правого поворота остается включенным. План действий, в котором рассматриваемое транспортное средство V не поворачивает на вторую-четвертую соединительные проезжие части R2-R4, может, таким образом, быть сообщен другому транспортному средству V2, в частности, в окрестностях рассматриваемого транспортного средства. Кроме того, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, свечение переключается с указателя правого поворота на указатель левого поворота, когда рассматриваемое транспортное средство V прибывает ко второй области A3 свечения для первого правого поворота. План действий, в котором рассматриваемое транспортное средство V не поворачивает на пятую соединительную проезжую часть R5, может, таким образом, быть сообщен другому транспортному средству V2, в частности, в окрестностях рассматриваемого транспортного средства. Другими словами, переключение свечения с указателя правого поворота на указатель левого поворота позволяет другому транспортному средству V2 подготовиться к движению рассматриваемого транспортного средства V с перекрестка RA с круговым движением на пятую соединительную проезжую часть R5 (выезд рассматриваемого транспортного средства V с перекрестка RA с круговым движением). Другие транспортные средства V1, V2 аналогичны другим транспортным средствам V1, V2 в действии управления помощью при вождении для первого целевого маршрута TR1 и поэтому не описываются.
[0130] Далее будет описано действие управления помощью при вождении для четвертого целевого маршрута TR4. Последовательность операций, начинающаяся с начала процесса управления на фиг. 4 и продолжающаяся до КОНЦА на фиг. 5, аналогична действию управления помощью при вождении для третьего целевого маршрута TR3 и поэтому не описывается. Для четвертого целевого маршрута TR4 на этапе S4 устанавливается вторая область A4 свечения для второго правого поворота, и на этапе S32 оценивается, прибыло ли рассматриваемое транспортное средство ко второй области A4 свечения для второго правого поворота, что отличается от S4 и S32 для третьего целевого маршрута TR3.
[0131] Далее описывается работа рассматриваемого транспортного средства V, движущегося по четвертому целевому маршруту TR4, на основе фиг. 9. Период до момента времени t33 на фиг. 9 аналогичен периоду до момента времени t33 на фиг. 8 и поэтому не описывается. Для четвертого целевого маршрута TR4 вторая область A4 свечения для второго правого поворота устанавливается в момент времени t31, который отличается от момента времени t31 для третьего целевого маршрута TR3.
[0132] От момента времени t32 до момента времени t34, сигнал правого поворота остается включенным, и рассматриваемое транспортное средство V не прибыло ко второй области A4 свечения для второго правого поворота. С момента времени t33 до момента времени t36 рассматриваемое транспортное средство V движется по круговой проезжей части CR. Период от момента времени t32 до момента времени t34 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S32 на фиг. 5.
[0133] С четвертым целевым маршрутом TR4 в этом примере, в отличие от третьего целевого маршрута TR3, другое транспортное средство V3 въезжает на перекресток RA с круговым движением с четвертой въездной проезжей части R41. Следовательно, вторая область A4 свечения для второго правого поворота устанавливается от местоположения, более близкого к третьей соединительной проезжей части R3, чем вторая область A3 свечения для первого правого поворота, до местоположения рядом с пятой соединительной проезжей частью R5 выезда EX рассматриваемого транспортного средства. В четвертом целевом маршруте TR4 рассматриваемое транспортное средство V, таким образом, прибывает ко второй области A4 свечения для второго правого поворота в момент времени t34, который наступает раньше, чем момент времени t35 третьего целевого маршрута TR3. Следовательно, состояние указателей поворота переключается со свечения указателя правого поворота на состояние погашенного указателя поворота и с состояние погашенного указателя поворота на свечение указателя левого поворота. В частности, свечение переключается с указателя правого поворота на указатель левого поворота. Момент времени t34 соответствует последовательности операций, включающей в себя «ДА» на S32 на фиг. 5 и ведущей на S33, S24 и S25. Период от момента времени t34 до момента времени t36 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S25 на фиг. 5. Момент времени t36 аналогичен моменту времени t36 третьего целевого маршрута TR3 и поэтому не описывается.
[0134] План действий рассматриваемого транспортного средства, таким образом, может быть сообщен посредством свечения указателя правого поворота другим транспортным средствам V1, V2 в окрестностях рассматриваемого транспортного средства, когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением. Кроме того, пока рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (круговой проезжей части CR) и до тех пор, пока рассматриваемое транспортное средство V не прибудет ко второй области A4 свечения для второго правого поворота, указатель правого поворота остается включенным. План действий, в котором рассматриваемое транспортное средство V не поворачивает на вторую соединительную проезжую часть R2, третью соединительную проезжую часть R3 или четвертую выездную проезжую часть R42, может быть таким образом сообщен другим транспортным средствам V2, V3, в частности, в окрестностях рассматриваемого транспортного средства. Другими словами, из-за того, что указатель правого поворота остается включенным, другое транспортное средство V3 будет отдавать приоритет рассматриваемому транспортному средству V, не выезжая на круговую проезжую часть CR. Кроме того, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, свечение переключается с указателя правого поворота на указатель левого поворота, когда рассматриваемое транспортное средство V прибывает ко второй области A4 свечения для второго правого поворота. План действий, в котором рассматриваемое транспортное средство V не поворачивает на пятую соединительную проезжую часть R5, может, таким образом, быть сообщен другому транспортному средству V2, в частности, в окрестностях рассматриваемого транспортного средства. Другими словами, переключение свечения с указателя правого поворота на указатель левого поворота позволяет другому транспортному средству V2 подготовиться к движению рассматриваемого транспортного средства V с перекрестка RA с круговым движением на пятую соединительную проезжую часть R5 (выезд рассматриваемого транспортного средства V с перекрестка RA с круговым движением).
[0135] Другие транспортные средства V1, V2 аналогичны другим транспортным средствам V1, V2 в действии управления помощью при вождении для первого целевого маршрута TR1 и поэтому не описываются. Другое транспортное средство V3 является транспортным средством, которое собирается въехать на круговую проезжую часть CR с четвертой въездной проезжей части R41, в то время как рассматриваемое транспортное средство V движется по круговой проезжей части CR.
[0136] Далее будет описано действие управления помощью при вождении для пятого целевого маршрута TR5. Последовательность операций, начинающаяся с начала процесса управления на фиг. 4 и ведущая к этапу S7 на фиг. 5, и последовательность операций, переходящая от S24 на КОНЕЦ, аналогичны операциям для действия управления помощью при вождении для третьего целевого маршрута TR3 и поэтому не описаны. Для пятого целевого маршрута TR5 на этапе S4 устанавливается вторая область A5 свечения для движения прямо, который отличается от S4 для третьего целевого маршрута TR3.
[0137] На S7 оценка выполнения условия для свечения указателя правого поворота является отрицательной, и процесс переходит с S7 на S41. На этапе S41 ни один из указателей 6 поворота, указывающих левое и правое направления, не светятся, и процесс переходит с S41 на S42. На S42 оценка прибытия ко второй области свечения для движения прямо является отрицательной через некоторое время. Когда оценка прибытия ко второй области свечения для движения прямо на S42 является положительной, процесс переходит с S42 на S24.
[0138] Далее описывается работа рассматриваемого транспортного средства V, движущегося по пятому целевому маршруту TR5, на основе фиг. 10. Период до момента времени t42 на фиг. 10 аналогичен периоду до момента времени t22 на фиг. 7 и поэтому не описывается. Для пятого целевого маршрута TR5 вторая область A5 свечения для движения прямо устанавливается в момент времени t41, который отличается от момента времени t21 для второго целевого маршрута TR2.
[0139] В момент времени t42 рассматриваемое транспортное средство V прибывает к первой области A1 свечения, условие свечения указателя левого поворота и условие свечения указателя поворота правого не выполняются. Следовательно, ни один из указателей 6 поворота, указывающих левое и правое направления, не светится (состояние погашенного указателя поворота). Момент времени t42 соответствует последовательности операций, включающей в себя вариант «ДА» в S5 на фиг. 4 и вариант «НЕТ» в S6 и в S7 на фиг. 5, и ведущей к этапам S41 и S42.
[0140] Момент времени t43, в которое рассматриваемое транспортное средство V прибывает к въезду EN рассматриваемого транспортного средства и собирается въехать на круговую проезжую часть CR. С момента времени t42 до момента времени t45 продолжается состояние погашенного указателя поворота, и рассматриваемое транспортное средство V не прибыло ко второй области A5 движения прямо. С момента времени t43 до момента времени t46 рассматриваемое транспортное средство V движется по круговой проезжей части CR. Период от момента времени t42 до момента времени t45 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S42 на фиг. 5.
[0141] В момент времени t45 рассматриваемое транспортное средство V прибывает ко второй области A5 свечения для движения прямо. Следовательно, состояние указателей поворота переключается из состояния погашенного указателя поворота на свечение указателя левого поворота. Момент времени t45 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S42 на фиг. 5 и ведущей на S24 и S25. Период от момента времени t45 до момента времени t46 соответствует последовательности операций, в которой повторно выбирается вариант «НЕТ» на этапе S25 на фиг. 5.
[0142] В момент времени t46 рассматриваемое транспортное средство V прошло через выезд EX рассматриваемого транспортного средства, чтобы выехать с перекрестка RA с круговым движением, и завершило въезд на четвертую соединительную проезжую часть R4. Следовательно, состояние указателей поворота переключается со свечения указателя левого поворота на состояние погашенного указателя поворота. Момент времени t46 соответствует последовательности операций, включающей в себя вариант «ДА» на этапе S25 на фиг. 5 и ведущей на S16 и КОНЕЦ.
[0143] Благодаря процессу, описанному выше, когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением, план действий рассматриваемого транспортного средства может быть сообщен другим транспортным средствам V1, V2 в окрестностях рассматриваемого транспортного средства посредством погашенного состояния, в котором ни один из указателей 6 поворота, указывающих левое и правое направления, не светится. Кроме того, пока рассматриваемое транспортное средство V движется по круговой проезжей части CR и до тех пор, пока рассматриваемое транспортное средство V не прибудет ко второй области A5 свечения для движения прямо, продолжается погашенное состояние, в котором ни один из указателей 6 поворота, указывающих левое и правое направления не светится. План действий, в котором рассматриваемое транспортное средство V не поворачивает на вторую соединительную проезжую часть R2 или третью соединительную проезжую часть R3, может, таким образом, быть сообщен другому транспортному средству V2, в частности, в окрестностях рассматриваемого транспортного средства. Кроме того, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, план действий, в котором рассматриваемое транспортное средство V поворачивает на четвертую соединительную проезжую часть R4, может быть сообщен посредством свечения указателя левого поворота другому транспортному средству V2, в частности, в окрестностях рассматриваемого транспортного средства, когда транспортное средство V прибывает ко второй области A5 свечения для движения прямо. Другими словами, свечение указателя левого поворота позволяет другому транспортному средству V2 подготовиться к движению рассматриваемого транспортного средства V с перекрестка RA с круговым движением на четвертую соединительную проезжую часть R4 (выезд рассматриваемого транспортного средства V с перекрестка RA с круговым движением). Другие транспортные средства V1, V2 аналогичны другим транспортным средствам V1, V2 в действии управления помощью при вождении для первого целевого маршрута TR1 и поэтому не описываются.
[0144] Таким образом, в действиях управления помощью при вождении для целевых маршрутов TR1-TR5 с первого по пятый, когда рассматриваемое транспортное средство V должно въехать на перекресток RA с круговым движением, план действий рассматриваемого транспортного средства может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства в зависимости от того, какой из указателей 6 поворота светится, а какой не светится. Кроме того, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, план действий, в котором рассматриваемое транспортное средство V поворачивает на любую из соединительных дорог с R2 по R5, может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства с помощью свечения указателя левого поворота.
[0145] Для целевых маршрутов TR1-TR5 с первого по пятый описаны случаи, в которых соединительные проезжие части, соединенные с выездами EX рассматриваемого транспортного средства, разделены на въездные проезжие части и выездные проезжие части, и есть другие транспортные средства, которые собираются въехать на круговую проезжую часть CR с въездных проезжих частей. В таких случаях, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, план действий, в котором рассматриваемое транспортное средство V поворачивает на выездную проезжую часть соединительной проезжей части, может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства путем свечения указателя левого поворота. Другими словами, свечение указателя левого поворота позволяет другим транспортным средствам начать въезд на круговую проезжую часть CR.
[0146] Кроме того, для второго целевого маршрута TR2 описан случай, в котором вторая соединительная проезжая часть R2, соединенная с первым выездом, разделяется на въездную проезжую часть и выездную проезжую часть, и существует другое транспортное средство, собирающееся въехать на круговую проезжую часть CR с въездной проезжей части второй соединительной проезжей части R2. В таких случаях указатель левого поворота гаснет после того, как рассматриваемое транспортное средство V въехало на перекресток RA с круговым движением (круговую проезжую часть CR), в результате чего план действий, в котором рассматриваемое транспортное средство V поворачивает на выездную проезжую часть второй соединительной проезжей части R2 может быть сообщен другому транспортному средству в окрестностях рассматриваемого транспортного средства. Другими словами, из-за выключения указателя левого поворота другое транспортное средство не въезжает на круговую проезжую часть CR и отдает приоритет рассматриваемому транспортному средству V.
[0147] Как описано выше, перечисленные ниже эффекты достигаются с помощью способа помощи при вождении и устройства помощи при вождении согласно первому варианту осуществления.
[0148] (1) Обеспечен контроллер (процессор 3 оценки распознавания), контроллер вычисляет маршрут движения (целевой маршрут), по которому должно следовать рассматриваемое транспортное средство V, и выполняет управление помощью при вождении на основе маршрута движения (целевого маршрута) (фиг. 1 и 2). В этом способе помощи при вождении выездная область свечения (вторая область A2-A5 свечения), где светится фонарь указателя поворота (указатель 6 поворота), указывающий что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением, устанавливается на основании маршрута движения (целевого маршрута) (фиг. 7-10). Когда ведущее транспортное средство V движется по перекрестку RA с круговым движением (круговой проезжей части CR), оценивается, прибыло ли рассматриваемое транспортное средство V в область свечения (вторые области A2-A5 свечения) (S22, S32 и S42 на фиг. 5). Когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением и оценено, что рассматриваемое транспортное средство V прибыло к области свечения (второй области A2-A5 свечения), выполняется управление для определения свечения фонаря указателя поворота (указателя 6 поворота, указателя левого поворота), указывающего, что рассматриваемое транспортное средство должно выехать с перекрестка RA с круговым движением (S24 на фиг. 5).
[0149] Таким образом, управление, которое определяет указатель 6 поворота, чтобы указать, что транспортное средство должно выехать с перекрестка RA с круговым движением, выполняется в соответствии с целевым маршрутом, по которому предполагается движение рассматриваемого транспортного средства V, и таким образом управляют указателем левого поворота на основании этого определения. В результате возможно обеспечить способ помощи при вождении, в котором, когда рассматриваемое транспортное средство V должно въехать на перекресток RA с круговым движением, план действий рассматриваемого транспортного средства V сообщается посредством указания поворота другим транспортным средствам в окрестностях рассматриваемого транспортного средства.
[0150] (2) Область свечения (вторая область A2-A5 свечения) устанавливается из взаимного расположения между въездом EN рассматриваемого транспортного средства для рассматриваемого транспортного средства V и выездом EX рассматриваемого транспортного средства для рассматриваемого транспортного средства V на перекрестке RA с круговым движением на основе маршрута движения (целевого маршрута) (S4 на фиг. 4).
[0151] Таким образом, из-за того, что выездная область свечения (вторые области A2-A5 свечения) задается из взаимного расположения между въездом EN рассматриваемого транспортного средства и выездом EX рассматриваемого транспортного средства, сигнал левого поворота светится, когда оценено, что рассматриваемое транспортное средство V прибыло к выездной области свечения (вторым областям A2-A5 свечения). Следовательно, план действий рассматриваемого транспортного средства V может быть сообщен посредством указания поворота другим транспортным средствам в окрестностях рассматриваемого транспортного средства в момент времени, соответствующий взаимному расположению.
[0152] (3) Когда выезд EX рассматриваемого транспортного средства является выездом (третьей соединительной проезжей частью) после того, как рассматриваемое транспортное средство въехало на перекресток RA с круговым движением (вторую соединительную проезжую часть R2), область свечения (вторые области A2-A5 свечения) устанавливается как следует ниже. [Область свечения] устанавливается от переходного местоположения (второго переходного местоположения 202, третьего переходного местоположения 302, четвертого разделительного местоположения 401, четвертого переходного местоположения 402), где рассматриваемое транспортное средство проезжает выезд, непосредственно предшествующий выезду EX рассматриваемого транспортного средства, до ближайшего местоположения (третьего ближайшего местоположения 300, четвертого ближайшего местоположения 400, пятого ближайшего местоположения 500), которое находится рядом с выездом EX рассматриваемого транспортного средства.
[0153] Таким образом, из-за того, что выездная область свечения (вторые области A2-A5 свечения) установлена от переходного местоположения до ближайшего местоположения, указатель левого поворота включается, когда оценено, что рассматриваемое транспортное средство V прибыло к области свечения. Следовательно, транспортное средство, следующее за рассматриваемым транспортным средством V на перекрестке RA с круговым движением, может подготовиться к выезду рассматриваемого транспортного средства V с перекрестка RA с круговым движением. Кроме того, другие транспортные средства, собирающиеся въехать на круговую проезжую часть CR с той же соединительной проезжей части, что и выезд, непосредственно предшествующий выезду EX рассматриваемого транспортного средства, не начинают въезжать на круговую проезжую часть CR, а отдают приоритет движению рассматриваемого транспортного средства V по перекрестку RA с круговым движением. Кроме того, другие транспортные средства, собирающиеся въехать на круговую проезжую часть CR с соединительной проезжей части (въездной проезжей части), соединенной с выездом EX рассматриваемого транспортного средства, могут начать въезд на круговую проезжую часть CR. В результате, пока рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (круговой проезжей части CR), план действий рассматриваемого транспортного средства V может быть точно сообщен посредством указания поворота другим транспортным средствам в окрестностях рассматриваемого транспортного средства в момент времени, когда оценено, что рассматриваемое транспортное средство V прибыло к въездной области свечения (второй области A2-A5 свечения).
[0154] (4) Взаимное расположение оценивают на основе маршрута движения (целевого маршрута). Когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением (круговую проезжую часть CR), управление выполняется в соответствии с оценкой взаимного расположения либо для определения того, какой из фонарей указателей поворота (указателей 6 поворота), указывающих левое и правое направления, должен светиться, либо для определения, что ни один из них не должен светиться (S11, S21, S31 и S41 на фиг. 5). Когда следующие два условия выполняются, область свечения (вторые области A2-A5 свечения) не устанавливается (последовательность операций от S11 до S16 на фиг. 5). Направление, указываемое светящимися фонарями указателей поворота (указателями 6 поворота), когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением (круговую проезжую часть CR), противоположно (указатель левого поворота) направлению кругового движения (направо), когда рассматриваемое транспортное средство V проезжает по перекрестку RA с круговым движением (S11 на фиг. 5). Кроме того, выезд EX рассматриваемого транспортного средства является первым выездом (второй соединительной проезжей частью R2) после того, как рассматриваемое транспортное средство вошло на перекресток RA с круговым движением (последовательность операций от S12 до S15 на фиг. 5).
[0155] Таким образом, из-за того, что выездная область свечения (вторые области A2-A5 свечения) не установлена, когда выезд EX рассматриваемого транспортного средства является первым выездом после того, как рассматриваемое транспортное средство вошло на перекресток RA с круговым движением, свечение указателя левого поворота продолжается. Следовательно, транспортное средство, следующее за рассматриваемым транспортным средством V на круговой проезжей части CR, может подготовиться к выезду рассматриваемого транспортного средства V с перекрестка RA с круговым движением. Кроме того, другие транспортные средства, собирающиеся въехать на круговую проезжую часть CR с соединительной проезжей части (въездной проезжей части), соединенной с выездом EX рассматриваемого транспортного средства, могут начать въезд на круговую проезжую часть CR. В результате, когда выезд EX рассматриваемого транспортного средства является первым выездом после того, как рассматриваемое транспортное средство вошло на перекресток RA с круговым движением, план действий рассматриваемого транспортного средства V может быть точно сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства посредством указания направления, в котором продолжается свечение указателя левого поворота. Кроме того, из-за того, что выездная область свечения (вторые области A2-A5 свечения) не задана, не нужно оценивать, прибыло ли рассматриваемое транспортное средство к выездной области свечения (вторым областям A2-A5 свечения), и прилагаемая нагрузка на управление может быть уменьшена.
[0156] (5) С момента времени, когда рассматриваемое транспортное средство V въезжает через въезд EN рассматриваемого транспортного средства на перекрестке RA с круговым движением, до тех пор, пока рассматриваемое транспортное средство V не выезжает с перекрестка RA с круговым движением, текущее взаимное расположение между текущим местоположением рассматриваемого транспортного средства V и выездом EX рассматриваемого транспортного средства последовательно сравнивают и выполняют оценку, выполняется ли условие переключения для переключения направления, указываемого фонарями указателей поворота (указателями 6 поворота). Когда условие переключения выполняется, направление, указываемое фонарями указателей поворота (указателями 6 поворота), переключается на основе условия переключения (последовательность операций от S11 до S21 на фиг. 5, последовательность операций от S21 до S24 на фиг. 5, последовательность операций от S31 до S33 на фиг. 5, последовательность операций от S33 до S24 на фиг. 5 и последовательность операций от S41 до S24 на фиг. 5).
[0157] Таким образом, с момента времени, когда рассматриваемое транспортное средство V въезжает через въезд EN рассматриваемого транспортного средства до тех пор, пока рассматриваемое транспортное средство V не выезжает с перекрестка RA с круговым движением, план действий рассматриваемого транспортного средства V, находящегося на перекрестке RA с круговым движением, может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства путем переключения направления, указываемого указателями 6 поворота. В результате план действий рассматриваемого транспортного средства V, находящегося на перекрестке RA с круговым движением, может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства с момента времени въезда рассматриваемого транспортного средства V через въезд EN рассматриваемого транспортного средства до момента времени выезда рассматриваемого транспортного средства V с перекрестка RA с круговым движением.
[0158] Все следующие переключения считаются условиями переключения. Одно из них является переключением со свечения указателя левого поворота на состояние погашенного указателя поворота в последовательности операций от S11 до S21 на фиг. 5. Другим из них является переключение из состояния погашенного указателя поворота на свечение указателя левого поворота в последовательности операций от S21 до S24 на фиг. 5, последовательности операций от S33 до S24 на фиг. 5 и последовательности операций от S41 до S24 на фиг. 5. Другим из них является переключение со свечения указателя правого поворота на состояние погашенного указателя поворота в последовательности операций от S31 до S33 на фиг. 5.
[0159] (6) Взаимное расположение оценивают на основе маршрута движения (целевого маршрута). Когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением (круговую проезжую часть CR), управление выполняется в соответствии с оценкой взаимного расположения либо для определения того, какой из фонарей указателей поворота (указателей 6 поворота), указывающих левое и правое направления, должен светиться, либо для определения, что ни один из них не должен светиться (S11, S21, S31 и S41 на фиг. 5). При выполнении следующих двух условий фонари указателей поворота (указатели 6 поворота) гаснут после того, как рассматриваемое транспортное средство V въехало на перекресток RA с круговым движением (круговую проезжую часть CR) (последовательность операций от S20 до S21 на фиг. 5). Во-первых, одно из них заключается в том, что направление, указываемое светящимся фонарем указателя поворота (указателем 6 поворота), когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением, противоположно (указатель левого поворота) направлению кругового движения (направо), когда рассматриваемое транспортное средство проезжает по перекрестку RA с круговым движением (S11 на фиг. 5). Другое из них заключается в том, что выезд EX рассматриваемого транспортного средства является выездом (третьей соединительной проезжей частью), следующим за первым выездом (второй соединительной проезжей частью R2) после того, как рассматриваемое транспортное средство вошло на перекресток RA с круговым движением (последовательность операций от S12 до S20 на фиг. 5).
[0160] Таким образом, из-за гашения указателя левого поворота после того, как рассматриваемое транспортное средство V въехало на перекресток RA с круговым движением (круговую проезжую часть CR), можно сообщить, что выезд EX рассматриваемого транспортного средства не является первым выездом сзади идущим транспортным средствам в окрестностях рассматриваемого транспортного средства и другим транспортным средствам, которые собираются въехать на круговую проезжую часть CR с соединительной проезжей части (въездной проезжей части), соединенной с первым выездом. В результате, пока рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (круговой проезжей части CR), план действий рассматриваемого транспортного средства V во время движения по перекрестку RA с круговым движением может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства в момент времени, когда рассматриваемое транспортное средство V въезжает на перекресток RA с круговым движением (круговую проезжую часть CR).
[0161] (7) Когда рассматриваемое транспортное средство V должно выехать с перекрестка с перекрестком RA с круговым движением, направление, указываемое светящимся в конце фонарем указателя поворота (указателем 6 поворота), противоположно (указатель левого поворота) направлению кругового движения (вправо), когда рассматриваемое транспортное средство проезжает по перекрестку RA с круговым движением (последовательность операций от S11 до S15 на фиг. 5, последовательность операций S21-S24 на фиг. 5, последовательность операций от S31 до S24 на фиг. 5, и последовательность операций от S41 до S24 на фиг. 5).
[0162] Таким образом, посредством свечения указателя левого поворота, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, можно сообщить, что рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением, сзади идущим транспортным средствам в окрестностях рассматриваемого транспортного средства и другим транспортным средствам, собирающимся въехать на круговую проезжую часть CR с соединительной проезжей части (въездной проезжей части), соединенной с выездом EX рассматриваемого транспортного средства. В результате, пока рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (круговой проезжей части CR), план действий рассматриваемого транспортного средства V во время движения по перекрестку RA с круговым движением может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства в момент времени, когда рассматриваемое транспортное средство V выезжает с перекрестка RA с круговым движением.
[0163] (8) Обеспечен контроллер (процессор 3 оценки распознавания), контроллер вычисляет маршрут движения (целевой маршрут), по которому должно следовать рассматриваемое транспортное средство, и выполняет управление помощью при вождении на основе маршрута движения (целевого маршрута) (фиг. 1 и 2). В этом устройстве помощи при вождении контроллер (процессор 3 оценки распознавания) имеет блок установки (блок 33b установки второй области свечения), блок оценки прибытия к области свечения (блок 35 оценки прибытия ко второй области свечения) и блок управления фонарями указателей поворота (блок 38 управления указателями поворота). На основе маршрута движения (целевого маршрута) блок установки (блок 33b установки второй области свечения) устанавливает выездную область свечения (вторые области A2-A5 свечения) для свечения фонаря указателя поворота (указателя 6 поворота), указывающего выезд рассматриваемого транспортного средства V с перекрестка RA с круговым движением (фиг. 7-10). Блок оценки прибытия к области свечения (блок 35 оценки прибытия ко второй области свечения) оценивает, прибыло ли рассматриваемое транспортное средство V к области свечения (вторые области A2-A5 свечения) (S22, S32 и S42 на фиг. 5), в то время как рассматриваемое транспортное средство V движется по перекрестку RA с круговым движением (круговой проезжей части CR). Когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением и оценено, что рассматриваемое транспортное средство V прибыло к области свечения (второй области A2-A5 свечения), блок управления фонарями указателей поворота (блок 38 управления указателями поворота) выполняет управление для определения свечения фонаря указателя поворота (указателя 6 поворота, указателя левого поворота), который указывает, что рассматриваемое транспортное средство должно выехать с перекрестка RA с круговым движением (S24 на фиг. 5).
[0164] Таким образом, управление для определения указателя 6 поворота, который будет указывать, что рассматриваемое транспортное средство выезжает с перекрестка RA с круговым движением, выполняется в соответствии с целевым маршрутом, по которому предполагается движение рассматриваемого транспортного средства V, и таким образом управляют указателем левого поворота на основании этого определения. В результате можно обеспечить устройство и способ помощи при вождении, в котором план действий рассматриваемого транспортного средства V сообщается посредством указания поворота другим транспортным средствам в окрестностях рассматриваемого транспортного средства, когда рассматриваемое транспортное средство V должно выехать с перекрестка RA с круговым движением.
[0165] Способ помощи при вождении и устройство помощи при вождении настоящего раскрытия были описаны выше на основе первого варианта осуществления, но этот пример не предоставляется в качестве ограничения конкретной конфигурации, допускаются изменения конструкции, дополнения и т. д., если нет отклонений от объема изобретения, указанного в формуле изобретения.
[0166] В первом варианте осуществления был представлен пример, в котором рассматриваемое транспортное средство V прибывает к перекрестку RA с круговым движением («ДА» на S3 на фиг. 4), и когда оценивается, что рассматриваемое транспортное средство V прибыло к первой области A1 свечения («ДА» на S5 на фиг. 4), оценивается взаимное расположение между въездом EN рассматриваемого транспортного средства и выездом EX рассматриваемого транспортного средства (S6 и S7 на фиг. 5). Однако этот пример не является ограничивающим. Например, установка первой области свечения на S4 на фиг. 4 и оценка на S5 на фиг. 4 могут быть опущены. В частности, взаимное расположение между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства может быть оценено после того, как рассматриваемое транспортное средство прибыло к перекрестку с круговым движением. Когда оценивается, что рассматриваемое транспортное средство прибыло к перекрестку с круговым движением или когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением (кольцую проезжую часть), управление предпочтительно выполняется в соответствии с оценкой взаимного расположения, чтобы определить, какой из фонарей указателей поворота, указывающих левое и правое направления должен светиться или не должен ли светиться ни один из них.
[0167] В первом варианте осуществления был представлен пример, в котором, когда рассматриваемое транспортное средство оценивается блоком 32 оценки прибытия к перекрестку с круговым движением как прибывшее к перекрестку с круговым движением, блок 33b установки второй области свечения устанавливает вторые области A2-A5 свечения на основе информации о целевом маршруте. Однако этот пример не является ограничивающим по периоду времени, в который устанавливаются вторые области свечения. Например, вторая область свечения может быть установлена, когда рассматриваемое транспортное средство прибыло к въезду рассматриваемого транспортного средства на перекресток с круговым движением. В качестве альтернативы, вторая область свечения может быть установлена в местоположении, где рассматриваемое транспортное средство проезжает выезд, предшествующий выезду рассматриваемого транспортного средства на два выезда, или в местоположении, где рассматриваемое транспортное средство проезжает выезд, предшествующий этому выезду.
[0168] В первом варианте осуществления был представлен пример, в котором блок 33b установки второй области свечения устанавливает вторую область свечения от переходного местоположения (202, 302, 401, 402) до ближайшего местоположения (300, 400, 500). Однако этот пример не является ограничивающим по второй области свечения. Ниже приведены примеры вторых областей свечения.
[0169] Вторая область свечения может быть уже, чем в первом варианте осуществления. Например, вторая область свечения может быть установлена на расстоянии нескольких десятков сантиметров от переходного местоположения. Когда рассматриваемое транспортное средство подъезжает ко второй области освещения и проходит ее, предпочтительно оценивается, что рассматриваемое транспортное средство прибыло ко второй области свечения. Вторая область свечения также может быть шире, чем в первом варианте осуществления.
[0170] Вторая область свечения может быть изменена на основе ограничения скорости на перекрестке с круговым движением, по которому проезжают. Кроме того, блок установки второй области свечения имеет таблицу вторых областей свечения для каждого ограничения скорости. Таблица вторых областей свечения может быть считана в соответствии с ограничением скорости на перекрестке с круговым движением, и вторая область свечения может быть изменена. Таблица вторых областей свечения имеет, например, значения расстояния второй области свечения, которые устанавливаются более длинными при более высоких ограничениях скорости, и, наоборот, значения расстояния области второй области свечения, которые устанавливаются более короткими при более низких ограничениях скорости. Кроме того, вместо использования таблицы вторых областей свечения вторая область свечения может быть изменена на расстояние, полученное путем умножения ограничения скорости на заданное количество секунд. Заданное количество секунд может быть установлено на уровне нескольких секунд независимо от ограничения скорости, или заданное количество секунд может быть изменено в соответствии с ограничением скорости. Термин «расстояние второй области свечения» относится к длине участка, на котором вторая область свечения накладывается на целевой маршрут рассматриваемого транспортного средства.
[0171] Вторая область свечения может быть изменена на основе величины потока транспортных средств из информации об окружении основного транспортного средства, когда рассматриваемое транспортное средство движется по перекрестку с круговым движением (круговой проезжей части). Например, расстояние второй области свечения устанавливается короче для большей величины потока транспортных средств, и расстояние второй области свечения устанавливается длиннее для меньшей величины потока транспортных средств. В качестве альтернативы, расстояние, необходимое для изменения местоположения движения (полосы движения и т. д.) рассматриваемого транспортного средства на перекрестке с круговым движением, может быть добавлено к величине потока транспортных средств, чтобы изменить расстояние второй области свечения. Блок установки второй области свечения принимает ввод информации об окружении рассматриваемого транспортного средства.
[0172] Вторая область свечения устанавливается по результату подсчета, какой номер выезда является выездом рассматриваемого транспортного средства от въезда рассматриваемого транспортного средства. Например, вторая область свечения устанавливается в ближайшем местоположении первого варианта осуществления, которое расположено после области возможности выезда, в которой рассматриваемое транспортное средство может выехать через выезд, непосредственно предшествующий выезду рассматриваемого транспортного средства.
[0173] В первом варианте осуществления был представлен пример, в котором устанавливается вторая область A3/A4 свечения. Также был представлен пример, в котором свечение указателя правого поворота продолжается до тех пор, пока рассматриваемое транспортное средство V не прибудет ко второй области A3/A4 свечения (при этом процесс переходит от S31 к S32 на фиг. 5, и на S32 повторно принимается вариант «НЕТ»). Однако этот пример не является ограничивающим, возможно установить местоположение погашенного указателя поворота или область погашенного указателя поворота, в которой гаснет указатель правого поворота, и предполагается состояние погашенного указателя поворота. Местоположение погашенного указателя поворота или область погашенного указателя поворота отличается от состояния временно погашенного указателя поворота для переключения со свечения указателя правого поворота на свечение указателя левого поворота, как в последовательности операций на фиг. 5, включая S31, вариант «ДА» в S32, S33 и S24; состояние погашенного указателя поворота продолжается от нескольких секунд до нескольких десятков секунд.
[0174] Когда выполняется условие, показанное ниже, также устанавливается местоположение погашенного указателя поворота/область погашенного указателя поворота для фонарей указателей поворота. Таким образом, возможно, пока рассматриваемое транспортное средство движется по перекрестку с круговым движением (круговой проезжей части), сообщить сзади идущим транспортным средствам в окружении рассматриваемого транспортного средства и с другим транспортным средствам, которые собираются выехать на круговую проезжую часть с соединительной проезжей части, что рассматриваемое транспортное средство должно продолжать движение по перекрестку с круговым движением (круговой проезжей части). Фраза «фонарь указателя поворота, светящийся, когда рассматриваемое транспортное средство должно въехать на перекресток с круговым движением» заменена ниже на «фонарь указателя поворота, светящийся во время въезда». Кроме того, «фонарь указателя поворота, указывающий выезд рассматриваемого транспортного средства с перекрестка с круговым движением» заменена ниже на «фонарь указателя выездного поворота».
[0175] Когда выполняется условие, что зазор дороги (ширина дороги) в соединительной проезжей части, непосредственно предшествующей выезду рассматриваемого транспортного средства, больше, чем заданное значение, местоположение/область, где гаснет фонарь указателя поворота, светящийся во время въезда, устанавливается до того, как загорится фонарь указателя выездного поворота. Фонарь указателя поворота, светящийся во время въезда, гаснет в такие моменты времени, как, например, когда рассматриваемое транспортное средство въезжает на круговую проезжую часть или рассматриваемое транспортное средство проезжает выезд, который является двумя выездами перед выездом рассматриваемого транспортного средства. «Заданное значение» в этом случае может быть изменено в соответствии с ограничением скорости на соединительной проезжей части, непосредственно предшествующей выезду рассматриваемого транспортного средства, или может быть изменено в соответствии с ограничением скорости на перекрестке с круговым движением (круговой проезжей части). Таким образом, случай, в котором фонарь указателя поворота, светящийся во время въезда, среди прочего, является случаем, когда соединительная проезжая часть, непосредственно предшествующая выезду рассматриваемого транспортного средства, разделена на множество полос движения. В частности, это тот случай, когда есть свобода выбора при выборе полосы движения на соединительной проезжей части, непосредственно предшествующей выезду рассматриваемого транспортного средства. В этом случае, посредством гашения фонаря указателя поворота, светящегося во время въезда, план действий рассматриваемого транспортного средства, не въезжающего на соединительную проезжую часть, непосредственно предшествующую выезду рассматриваемого транспортного средства (не выезжающего с перекрестка с круговым движением), может быть сообщен транспортным средствам, следующим за рассматриваемым транспортным средством или другим транспортным средствам, собирающимся въехать на круговую проезжую часть с соединительной проезжей части, непосредственно предшествующей выезду рассматриваемого транспортного средства.
[0176] Когда выполняется условие, что въезд рассматриваемого транспортного средства и выезд рассматриваемого транспортного средства на перекрестке с круговым движением разделены по меньшей мере двумя [выездными проезжими частями], местоположение/область, где фонарь указателя поворота, светящийся во время въезда, гаснет, устанавливается до того, как включается фонарь указателя выездного поворота.
[0177] В первом варианте осуществления был представлен пример, в котором, когда выезд EX рассматриваемого транспортного средства является выездом после первого выезда после того, как рассматриваемое транспортное средство вошло на перекресток RA с круговым движением, блок 33b установки второй области свечения устанавливает вторую область свечения от переходного местоположения (202, 302, 401, 402) до ближайшего местоположения (300, 400, 500). Однако этот пример не является ограничивающим. Например, вторая область свечения также может быть областью смены полосы движения, где рассматриваемое транспортное средство меняет полосу движения (или колонну транспортных средств; то же самое применяется ниже) на перекрестке с круговым движением (круговой проезжей части). Этот пример описан ниже для случая, в котором полоса движения, когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением (круговую проезжую часть), является двойной полосой движения. В этом случае одна полоса движения является полосой движения, где [транспортные средства] движутся по внешней стороне круговой проезжей части, а другая полоса движения является полосой движения, где [транспортные средства] движутся по внутренней стороне круговой проезжей части. Когда рассматриваемое транспортное средство въезжает на круговую проезжую часть с другой полосы движения, рассматриваемое транспортное средство переходит на внешнюю полосу движения круговой проезжей части при выезде с перекрестка с круговым движением. В это время область смены полосы движения, где меняют полосу движения, и вторая область свечения являются одной и той же областью. Можно сменить полосу движения при включении фонаря указателя выездного поворота, если обе области будут одной и той же областью. Следовательно, области не нужно устанавливать отдельно. Этот пример применяется к случаям, когда транспортное средство должно выехать с перекрестка с круговым движением и должно перейти на внешнюю полосу движения, и такие случаи, как следование целевому маршруту и переход на внешнюю полосу движения, позволили бы плавно двигаться по маршруту. В этом примере момент времени, когда «рассматриваемое транспортное средство въезжает на круговую проезжую часть с другой полосы движения», является моментом времени, когда, например, оценка в S7 на фиг. 5 является «ДА», как в первом варианте осуществления.
[0178] В первом варианте осуществления был представлен пример, в котором взаимное расположение оценивается по относительному углу θ, показанному на фиг. 11. Однако этот пример не является ограничивающим по свечению. Например, значение первого угла может быть больше, а значение второго угла может быть меньше, чем в первом варианте осуществления. Наоборот, значение первого угла может быть меньше, а угол второго угла может быть больше, чем в первом варианте осуществления. Кроме того, относительный угол может быть установлен в соответствии с количеством дорог, соединенных с круговой проезжей частью. Короче говоря, взаимное расположение предпочтительно оценивается по относительному углу между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства. В первом варианте был представлен пример, в котором выполняются условия, когда весь выезд рассматриваемого транспортного средства (граница круговой пунктирной линии L1 и соединительной проезжей части) находится в пределах относительного угла θ, но этот пример не приведен в качестве ограничения. Например, то, какое условие выполняется, можно оценить, помимо прочего, по процентному соотношению в пределах относительного угла θ.
[0179] В первом варианте осуществления был представлен пример, в котором взаимное расположение въезда EN рассматриваемого транспортного средства и выезда EX рассматриваемого транспортного средства на перекрестке RA с круговым движением оценивается в блоке 36 оценки взаимного расположения по относительному углу θ между въездом EN рассматриваемого транспортного средства и выездом EX рассматриваемого транспортного средства. Кроме того, был представлен пример, в котором относительный угол θ вычисляется из местоположений въезда EN рассматриваемого транспортного средства и выезда EX рассматриваемого транспортного средства, если смотреть из центра CE перекрестка RA с круговым движением. Однако этот пример не является ограничивающим по свечению. Например, относительный угол может быть вычислен из угла соединительной проезжей части, служащей в качестве въездной проезжей части для въезда рассматриваемого транспортного средства, и угла соединительной проезжей части, служащей в качестве выездной проезжей части для выезда рассматриваемого транспортного средства.
[0180] В первом варианте осуществления был представлен пример, в котором взаимное расположение въезда EN рассматриваемого транспортного средства и выезда EX рассматриваемого транспортного средства на перекрестке RA с круговым движением оценивается в блоке 36 оценки взаимного расположения по относительному углу θ между въездом EN рассматриваемого транспортного средства и выездом EX рассматриваемого транспортного средства. Однако этот пример не является ограничивающим. Ниже представлен пример оценки взаимного расположения.
[0181] Взаимное расположение может быть оценено по относительному расстоянию между въездом рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства. В частности, расстояние проезда от въезда рассматриваемого транспортного средства до выезда рассматриваемого транспортного средства вычисляется по осевой линии полосы движения в картографических данных, и вычисляется соотношение к общей длине перекрестка с круговым движением. Взаимное расположение можно оценить по этому соотношению. Например, когда соотношение больше 0 и не больше 0,4, взаимное расположение въезда и выезда предпочтительно является условием для включения указателя левого поворота, как в первом варианте осуществления. Например, когда соотношение больше 0,4 и не больше 0,6, взаимное расположение въезда и выезда предпочтительно является условием для невключения ни одного из указателей 6 поворота, указывающих левое и правое направления, как в первом варианте осуществления. Кроме того, когда соотношение больше 0,6 и не больше 1,0, взаимное расположение въезда и выезда предпочтительно является условием для включения указателя правого поворота, как в первом варианте осуществления.
[0182] Взаимное расположение может быть оценено по результату вычисления, какое количество выездов является выездом рассматриваемого транспортного средства, считая от въезда рассматриваемого транспортного средства. Например, количество соединительных проезжих частей может быть шесть. В этом случае въезд рассматриваемого транспортного средства считается нулевым. Когда выезд рассматриваемого транспортного средства находится в середине первой-пятой соединительных проезжих частей, то есть третьей, взаимное расположение выезда и въезда удовлетворяет условию не включать ни один из указателей 6 поворота, указывающих левое и правое направления. Когда выезд рассматриваемого транспортного средства является первым или вторым, взаимное расположение выезда и въезда предпочтительно удовлетворяет условию для свечения указателя левого поворота, как в первом варианте осуществления. Кроме того, когда выезд рассматриваемого транспортного средства является четвертым или пятым, взаимное расположение выезда и въезда предпочтительно соответствует условию для свечения указателя правого поворота, как в первом варианте осуществления. Кроме того, количество соединительных проезжих частей может составлять шесть, а въезд рассматриваемого транспортного средства и вторая соединительная проезжая часть могут иметь одно и то же название дороги. В этом случае, когда выезд рассматриваемого транспортного средства является вторым, предпочтительно оценивается взаимное расположение первой и с третьей по пятую соединительных проезжих частей, предполагая, что взаимное расположение выезда и въезда удовлетворяет условию для несвечения ни одного из указателей 6 поворота, указывающих левое и правое направления.
[0183] Взаимное расположение может быть оценено на основе направления (влево/прямо вперед/вправо), в котором присутствует выезд рассматриваемого транспортного средства по отношению к въезду рассматриваемого транспортного средства.
[0184] Взаимное расположение может быть оценено на основе информации для поворота налево, движения прямо и поворота направо в информации картографических данных.
[0185] Взаимное расположение может быть оценено путем объединения множества этих оценок взаимного расположения.
[0186] В первом варианте осуществления был представлен пример, в котором указатель левого поворота гаснет после того, как рассматриваемое транспортное средство V въехало на круговую проезжую часть CR, когда выполняются следующие два условия (последовательность операций от S20 до S21 на фиг. 5). Во-первых, одним из них является то, что указатель левого поворота светится, когда рассматриваемое транспортное средство V выезжает на перекресток RA с круговым движением (круговую проезжую часть CR) (S11 на фиг. 5). Другим из них является когда выезд EX рассматриваемого транспортного средства является выездом после первого выезда после того, как рассматриваемое транспортное средство вошло на перекресток RA с круговым движением (последовательность операций от S12 до S20 на фиг. 5). Однако этот пример не является ограничивающим. Короче говоря, левый из фонарей указателей поворота (указатель левого поворота) предпочтительно гаснет после того, как рассматриваемое транспортное средство въехало на круговую проезжую часть.
[0187] В первом варианте осуществления и примере, описанном выше, был представлен пример, в котором перекресток RA с круговым движением включает в себя центральный островок C, круговую проезжую часть CR, соединительные участки (въезд EN рассматриваемого транспортного средства и выезд EX рассматриваемого транспортного средства) между круговой проезжей частью CR и соединительные дороги R1-R6, а также участки соединительных дорог R1-R6. Однако этот пример не является ограничивающим. Например, перекресток с круговым движением может включать в себя центральный островок, круговую проезжую часть CR и соединительные участки (въезд EN рассматриваемого транспортного средства и выезд EX рассматриваемого транспортного средства) между круговой проезжей частью CR первого варианта осуществления, или перекресток с круговым движением может включать в себя центральный островок C и круговую проезжую часть CR первого варианта осуществления. Даже при такой конфигурации достигаются эффекты, описанные в (1)-(7) первого варианта осуществления.
[0188] В первом варианте осуществления и примере, описанном выше, был представлен пример, в котором способ помощи при вождении и устройство помощи при вождении согласно настоящему раскрытию применяются к перекрестку RA с круговым движением, на которой шесть соединительных дорог R1-R6 соединены с круговой проезжей частью CR. Однако этот пример не является ограничивающим. Например, способ и устройство могут быть применены к перекрестку с круговым движением, на котором четыре или восемь дорог соединены с круговой проезжей частью. Короче говоря, способ и устройство могут быть применены, если перекресток с круговым движением содержит три или более дорог, соединенных с круговой проезжей частью.
[0189] В первом варианте осуществления и в примере, описанном выше, был представлен пример, в котором способ помощи при вождении и устройство помощи при вождении согласно настоящему раскрытию применяются в случае левостороннего движения. Однако этот пример не является ограничивающим, способ помощи при вождении и устройство помощи при вождении настоящего раскрытия могут применяться в случае правостороннего движения. В этом случае направление кругового движения при проезде по круговой проезжей части, направление свечения, указанное фонарями указателей поворота и т. д., являются противоположными по отношению к левому и правому направлениям первого варианта осуществления и примера, описанного выше.
[0190] В первом варианте осуществления был представлен пример, в котором способ помощи при вождении и устройство помощи при вождении согласно настоящему раскрытию применяются к автономно управляемому транспортному средству, в котором индикаторы рулевого управления, движения, торможения и поворота автономно управляются посредством выбора автономного режима движения. Однако способ помощи при вождении и устройство помощи при вождении по настоящему раскрытию могут применяться к транспортному средству с помощью при движении, которое помогает в некоторых аспектах вождения при движении, торможении, рулевом управлении и управлении фонарями указателей поворота, которые выполняются водителем. Короче говоря, способ и устройство могут быть применены к транспортному средству, в котором, когда рассматриваемое транспортное средство выезжает на перекресток с круговым движением, водителю предоставляется помощь при вождении, поскольку управление выполняется в соответствии с оценкой взаимного расположения, чтобы определить, какой из фонарей указателей поворота, указывающих левое и правое направления, должен светиться или не должен ли светиться ни один из них. В транспортном средстве, которое обеспечивает помощь при вождении водителю, когда водитель управляет фонарями указателей поворота, например, определение фонарей указателей поворота сообщается водителю с помощью устройства отображения. Водитель предпочтительно управляет фонарями указателей поворота в соответствии с определением фонарей указателей поворота.
[0191] Когда водитель управляет фонарями указателей поворота и оценивается, что рассматриваемое транспортное средство прибыло к выездной области свечения (второй области свечения), свечение фонаря указателя поворота разрешается, когда водитель выполняет управление для свечения фонаря указателя поворота, который указывает, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением. Когда водитель управляет фонарями указателей поворота и оценивается, что рассматриваемое транспортное средство не прибыло к выездной области свечения (второй области свечения), свечение фонаря указателя поворота не разрешается, когда водитель выполняет управление для свечения фонаря указателя поворота, который указывает, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением. Таким образом, ошибочное включение водителем фонаря указателя поворота не допускается, что позволяет предотвратить сообщение плана действий рассматриваемого транспортного средства другим транспортным средствам в окрестностях рассматриваемого транспортного средства посредством ошибочного указания поворота, когда рассматриваемое транспортное средство не должно выезжать с перекрестка с круговым движением. В результате, когда водитель управляет фонарями указателей поворота и рассматриваемое транспортное средство должно выехать с перекрестка RA с круговым движением, план действий рассматриваемого транспортного средства V может быть сообщен другим транспортным средствам в окрестностях рассматриваемого транспортного средства путем правильного указания поворота. То же самое применимо, когда находящийся в транспортном средстве человек, другой, чем водитель, управляет сигналами поворота.
[0192] Транспортное средство, к которому применяются способ помощи при вождении и устройство помощи при вождении согласно настоящему раскрытию, будет соответствовать законам любой страны или региона при фактическом движении по дороге.
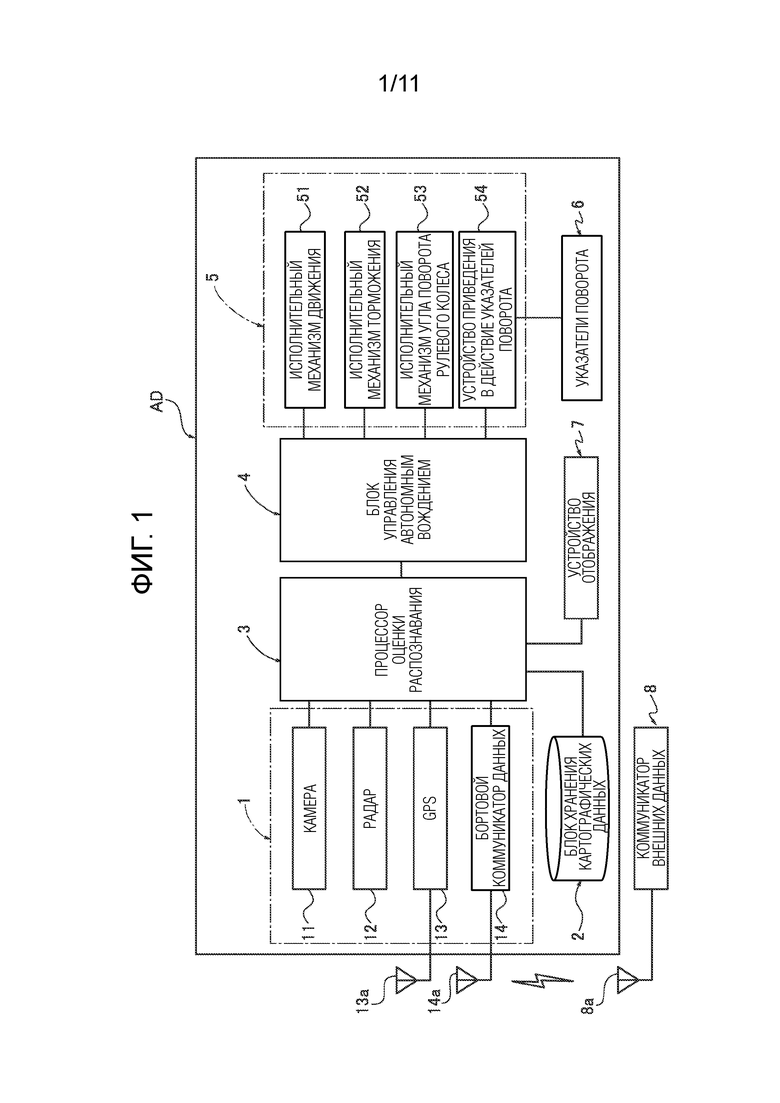
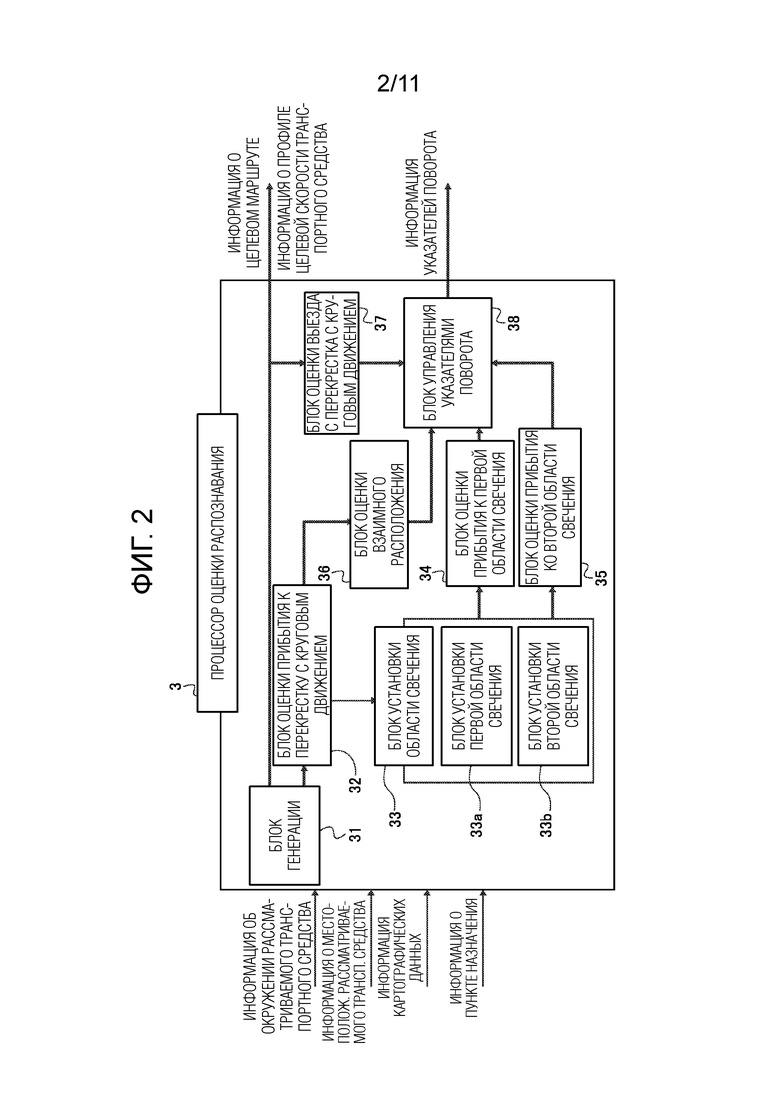

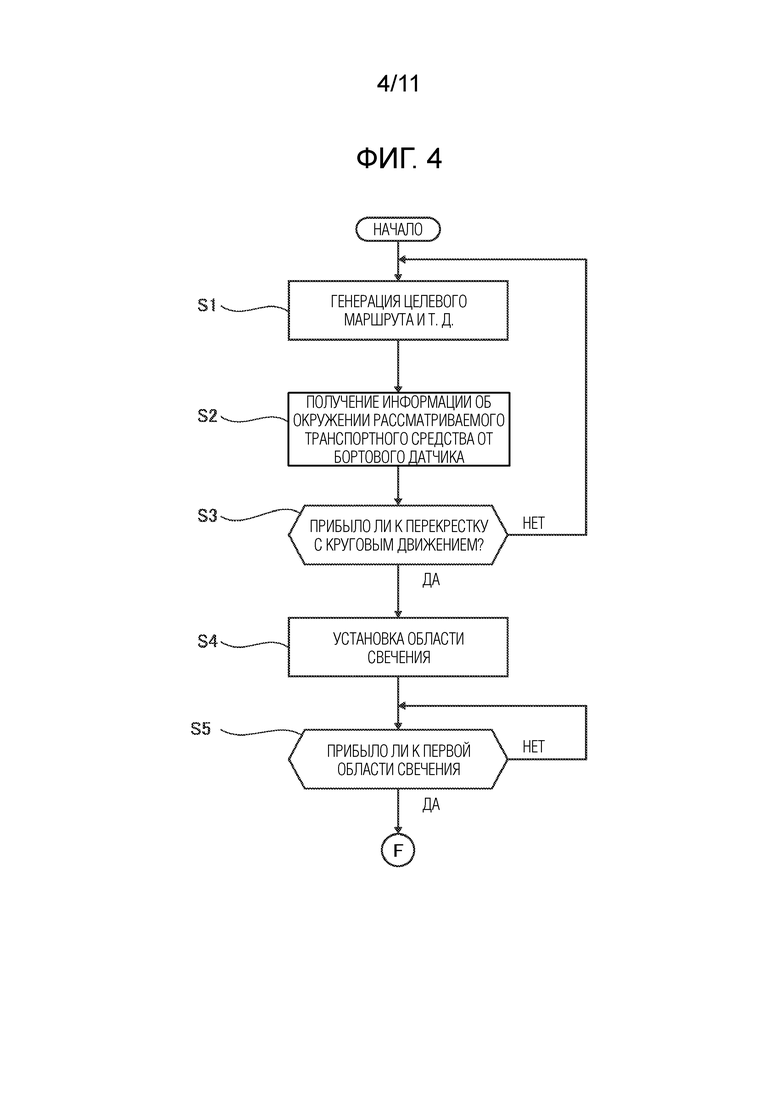
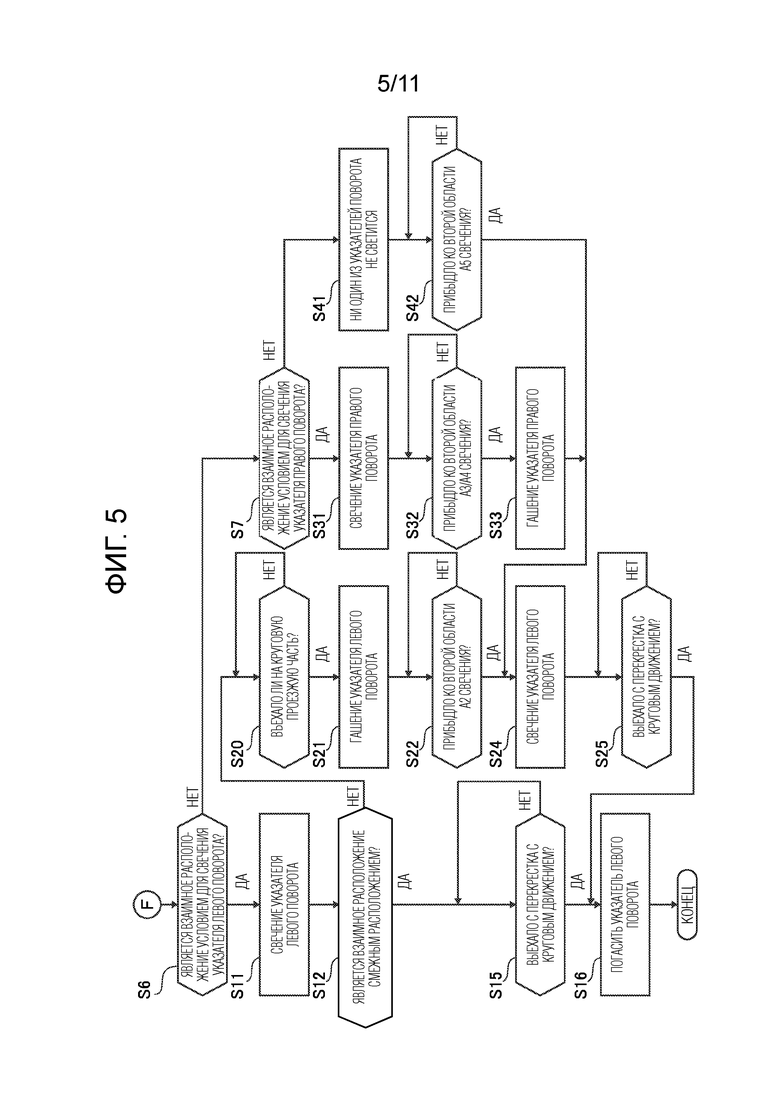
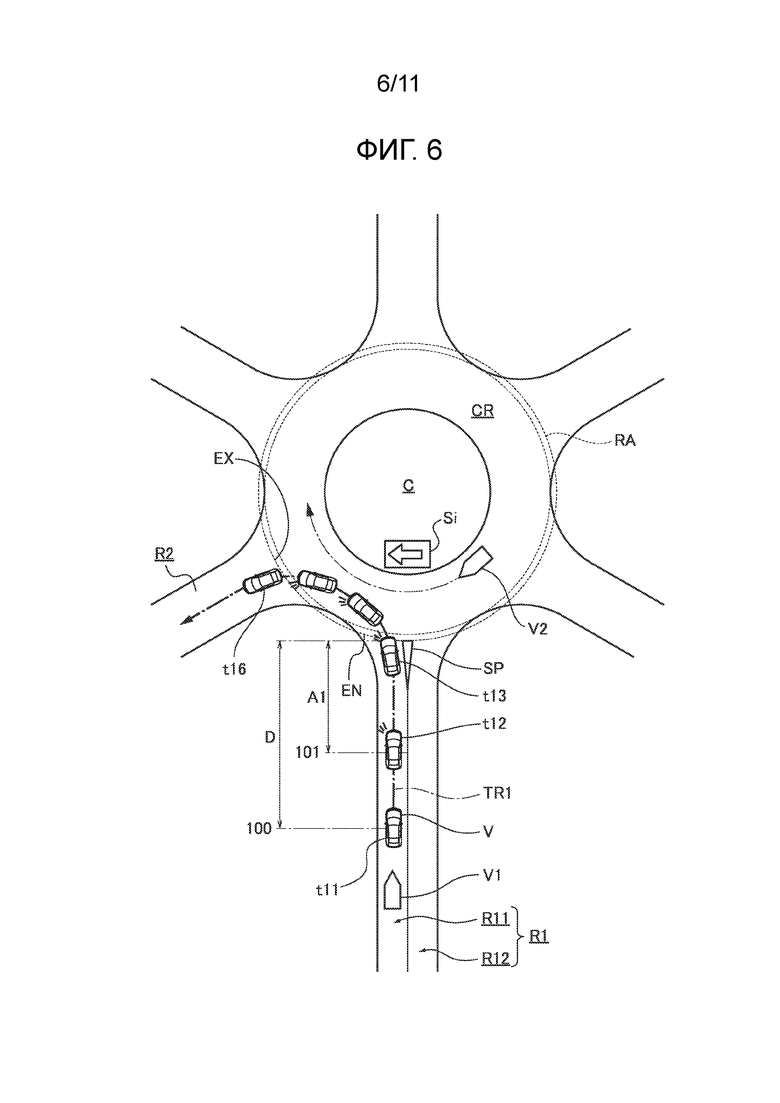
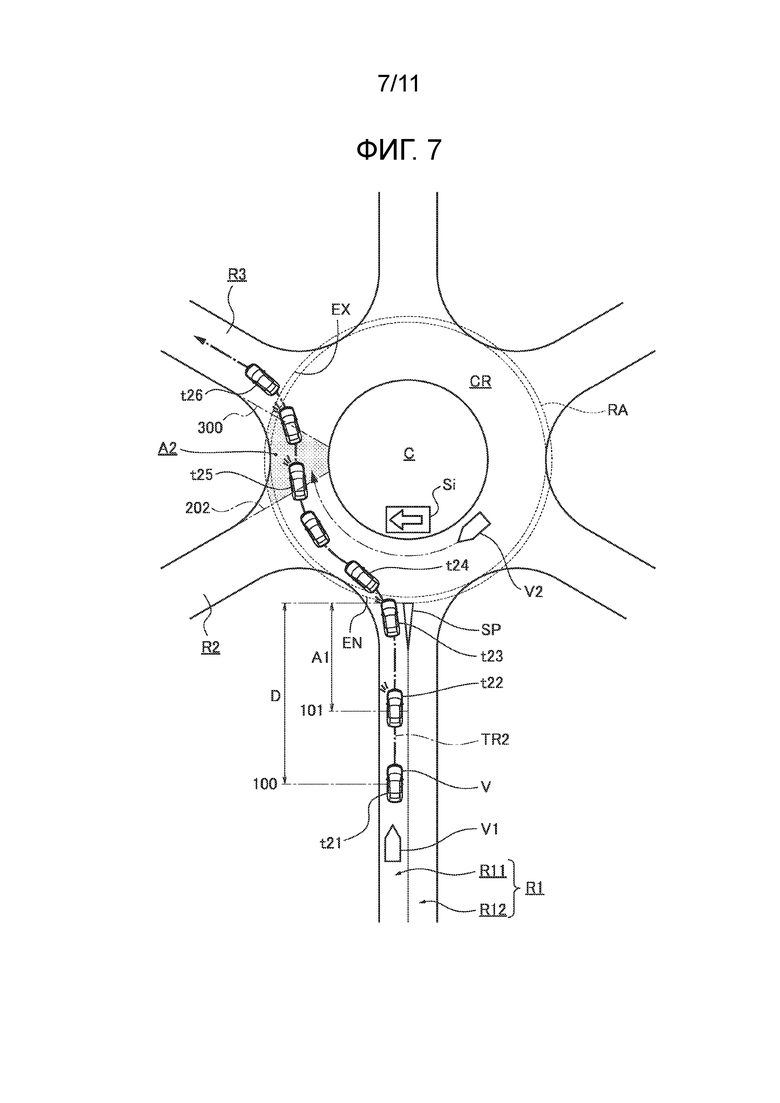
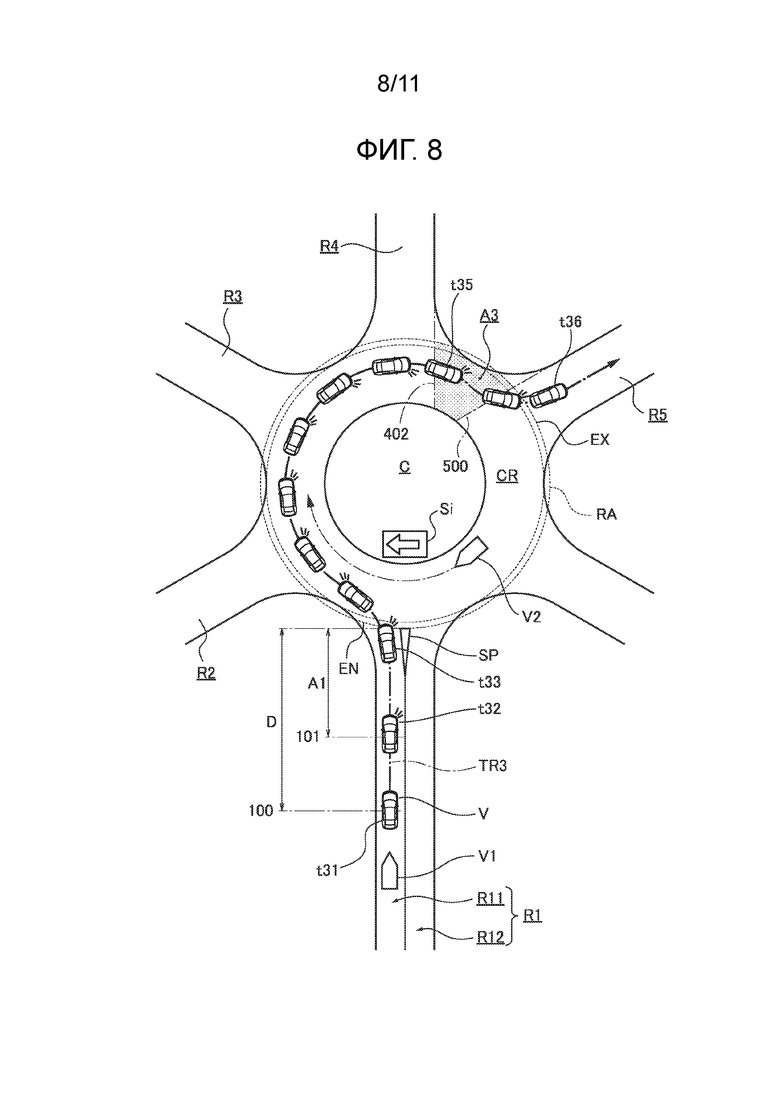
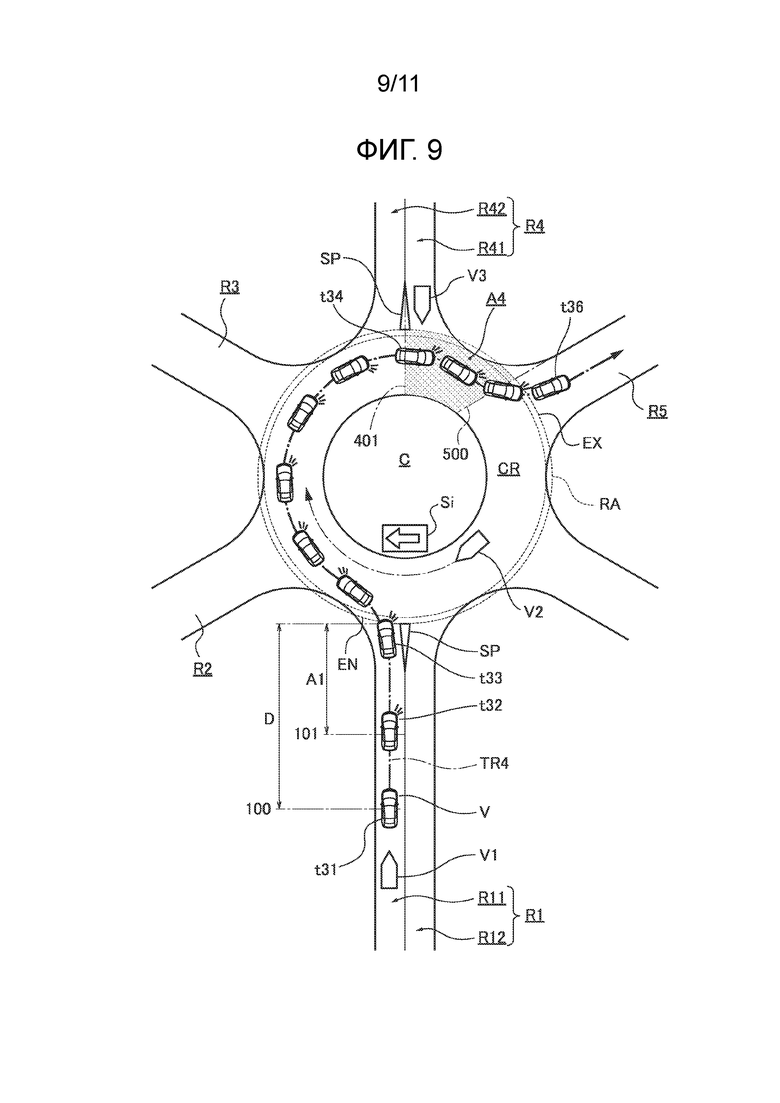

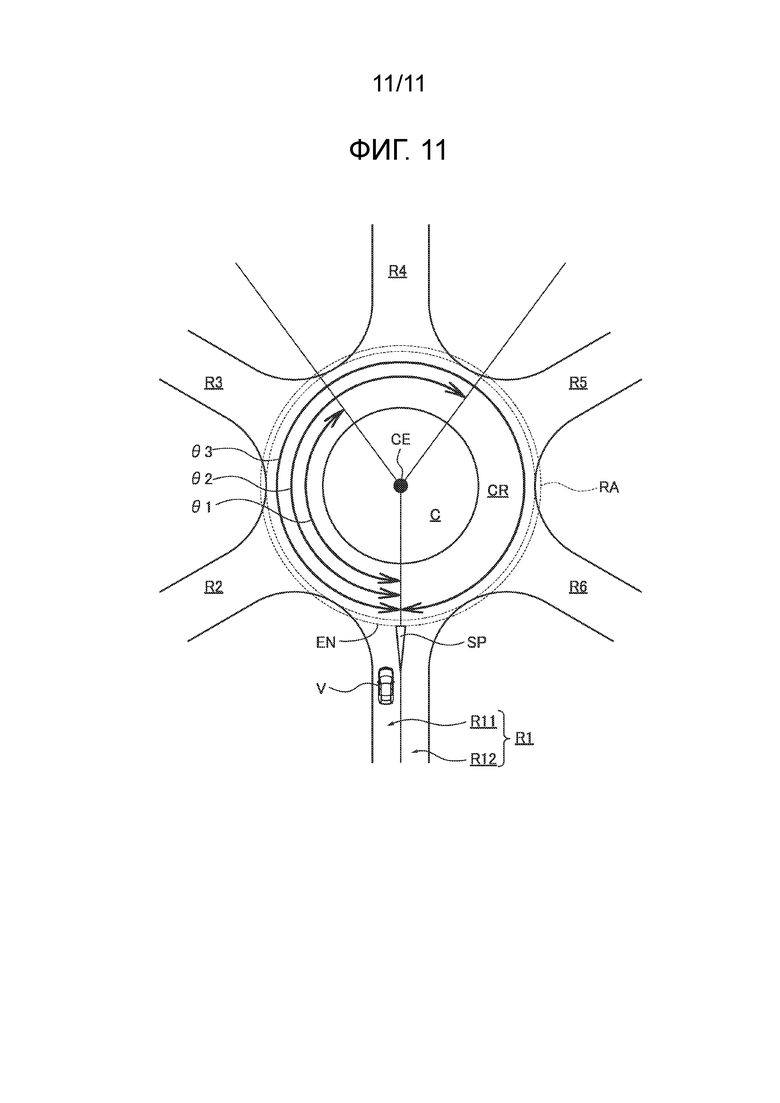
Группа изобретений относится к способу и устройству помощи при вождении. Устройство помощи при вождении содержит контроллер (3), выполненный с возможностью вычисления маршрута движения транспортного средства и выполнения управления помощью при вождении на основе маршрута движения. Контроллер включает блок (33) установки, блок (34) оценки прибытия к области свечения и блок (38) управления фонарями указателей поворота. Блок (33) установки выполнен с возможностью установки области свечения на основе маршрута движения, где фонарь указателя поворота должен светиться. Блок (34) оценки прибытия к области свечения выполнен с возможностью оценки, прибыло ли рассматриваемое транспортное средство к области свечения. Блок (38) управления фонарями указателей поворота выполнен с возможностью выполнения управления для определения свечения фонаря указателя поворота, который указывает, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением. Блок (33) установки выполнен с возможностью установки области свечения до въезда рассматриваемого транспортного средства на перекресток с круговым движением. Достигается обеспечение помощи при вождении. 2 н. и 6 з.п. ф-лы, 11 ил.
1. Способ помощи при вождении с использованием контроллера для вычисления маршрута движения, по которому должно следовать рассматриваемое транспортное средство, и для выполнения управления помощью при вождении на основе маршрута движения, при этом упомянутый способ помощи при вождении содержит этапы, на которых:
устанавливают (S4) область (A2) свечения для выезда на основе маршрута движения для свечения фонаря указателя поворота, указывающего, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением;
оценивают (S22), прибыло ли рассматриваемое транспортное средство к области свечения, когда рассматриваемое транспортное средство движется по перекрестку с круговым движением; и
выполняют (S24) управление для определения свечения фонаря указателя поворота, который указывает, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением, когда рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением, и оценено, что рассматриваемое транспортное средство прибыло к области свечения,
отличающийся тем, что
область свечения устанавливают до въезда рассматриваемого транспортного средства на перекресток с круговым движением из взаимного расположения между въездом рассматриваемого транспортного средства для рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства для рассматриваемого транспортного средства на перекрестке с круговым движением на основе маршрута движения.
2. Способ помощи при вождении по п. 1, в котором:
когда выезд рассматриваемого транспортного средства является выездом после первого выезда после того, как рассматриваемое транспортное средство вошло на перекресток с круговым движением, область свечения устанавливают от переходного местоположения, где рассматриваемое транспортное средство проезжает выезд, непосредственно предшествующий выезду рассматриваемого транспортного средства, до ближайшего местоположения рядом с выездом рассматриваемого транспортного средства (S4).
3. Способ помощи при вождении по п. 1 или 2, в котором:
взаимное расположение оценивают на основе маршрута движения (S12);
способ помощи при вождении дополнительно содержит этапы, на которых:
когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением, выполняют (S4) управление в соответствии с оценкой взаимного расположения, чтобы определить, какой из фонарей указателей поворота, указывающих левое и правое направления, должен светиться или не должен ли светиться ни один из них; при этом
когда направление, указываемое фонарем указателя поворота, светящимся при въезде рассматриваемого транспортного средства на перекресток с круговым движением, противоположно направлению кругового движения, когда рассматриваемое транспортное средство проезжает по перекрестку с круговым движением, и выезд рассматриваемого транспортного средства является первым выездом после того, как рассматриваемое транспортное средство прибыло на перекресток с круговым движением, область свечения не устанавливают.
4. Способ помощи при вождении по любому из пп. 1-3, в котором
с момента времени, когда рассматриваемое транспортное средство въезжает через въезд рассматриваемого транспортного средства на перекрестке с круговым движением до тех пор, пока рассматриваемое транспортное средство не выезжает c перекрестка с круговым движением, текущее взаимное расположение между текущим местоположением рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства для рассматриваемого транспортного средства на перекрестке с круговым движением последовательно сравнивают и выполняют оценку того, выполнено ли условие переключения для переключения направления, указываемого фонарями указателей поворота (S32); и
направление, указываемое фонарями указателей поворота, переключают на основе условия переключения, когда условие переключения выполнено (S33, S24).
5. Способ помощи при вождении по любому из пп. 1-4, в котором
взаимное расположение оценивают на основе маршрута движения;
когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением, выполняют управление в соответствии с оценкой взаимного расположения, чтобы определить, какой из фонарей указателей поворота, указывающих левое и правое направления, должен светиться или не должен ли светиться ни один из них (S6, S7); и
когда направление, указываемое фонарем указателя поворота, светящимся, когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением, противоположно направлению кругового движения, когда рассматриваемое транспортное средство проезжает по перекрестку с круговым движением, и выезд рассматриваемого транспортного средства является выездом после первого выезда после того, как рассматриваемое транспортное средство прибыло на перекресток с круговым движением, фонарь указателя поворота гасят после въезда рассматриваемого транспортного средства на перекресток с круговым движением (S21).
6. Способ помощи при вождении по любому из пп. 1-5, в котором
когда рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением, направление, указываемое светящимся в конце фонарем указателя поворота, противоположно направлению кругового движения, когда рассматриваемое транспортное средство проезжает по перекрестку с круговым движением (S11, S24).
7. Способ помощи при вождении по любому из пп. 1-6, в котором,
когда оценено, что рассматриваемое транспортное средство не прибыло к области свечения, свечение фонарей указателей поворота не допускают, даже если находящийся в рассматриваемом транспортном средстве человек выполняет управление для свечения фонаря указателя поворота, который указывает, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением.
8. Устройство помощи при вождении, содержащее:
контроллер (3), выполненный с возможностью вычисления маршрута движения, по которому должно следовать рассматриваемое транспортное средство, и выполнения управления помощью при вождении на основе маршрута движения, при этом контроллер, включает в себя:
блок (33) установки, выполненный с возможностью установки области свечения на основе маршрута движения, где фонарь указателя поворота, указывающий, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением, должен светиться;
блок (34) оценки прибытия к области свечения, выполненный с возможностью оценки, прибыло ли рассматриваемое транспортное средство к области свечения, установленной упомянутым блоком установки, когда рассматриваемое транспортное средство движется по перекрестку с круговым движением; и
блок (38) управления фонарями указателей поворота, выполненный с возможностью, когда рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением и оценено блоком оценки прибытия к области свечения, что рассматриваемое транспортное средство прибыло к области свечения, выполнения управления для определения свечения фонаря указателя поворота, который указывает, что рассматриваемое транспортное средство должно выехать с перекрестка с круговым движением,
отличающееся тем, что
упомянутый блок установки выполнен с возможностью установки области свечения до въезда рассматриваемого транспортного средства на перекресток с круговым движением из взаимного расположения между въездом рассматриваемого транспортного средства для рассматриваемого транспортного средства и выездом рассматриваемого транспортного средства для рассматриваемого транспортного средства на перекрестке с круговым движением на основе маршрута движения.
| JP 2016138866 A, 04.08.2016 | |||
| JP 2009115530 A, 28.05.2009 | |||
| JP 2017109657 A, 22.06.2017 | |||
| DE 102009047436 A1, 09.06.2011 | |||
| US 5428512 A, 27.06.1995 | |||
| FR 2913930 A1, 26.09.2008. |

