Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к устройству помощи при вождении и способу помощи при вождении, которые помогают управлять транспортным средством.
Уровень техники
[0002]
Известные технологии для этого типа устройств включают в себя устройство распознавания изображений, которое позволяет водителю рассматриваемого автомобиля распознавать действие замедления движущихся впереди автомобилей (Патентный документ 1: JP2012–118795A). Движущиеся впереди автомобили включают в себя первый движущийся впереди автомобиль, который движется непосредственно перед рассматриваемым автомобилем, и второй движущийся впереди автомобиль, который движется впереди первого движущегося впереди автомобиля. Устройство распознавания изображений работает для распознавания, когда первый или второй движущиеся впереди автомобили включают стоп–сигналы или аварийные огни, и, таким образом, для обеспечения водителю рассматриваемого автомобиля распознавать замедление второго движущегося впереди автомобиля.
Документ из уровня техники
Патентный документ
[0003]
[Патентный Документ 1] JP2012–118795A
Раскрытие изобретения
Задачи, решаемые изобретением
[0004]
В уровне техники, когда светится указатель поворота движущегося впереди транспортного средства, невозможно различить, означает ли освещение поворот направо или налево на перекрестке или остановку на обочине дороги. Следовательно, возникает проблема, состоящая в том, что, когда движущееся впереди транспортное средство останавливается с освещённым указателем поворота, не может быть выполнена надлежащая помощь при вождении для рассматриваемого транспортного средства, что может вызвать неприятные ощущения у пользователей рассматриваемого транспортного средства.
[0005]
Задача, решаемая настоящим изобретением, состоит в выполнении надлежащей помощи при вождении и уменьшении неприятных ощущений, которые испытывают пользователи рассматриваемого транспортного средства, даже когда движущееся впереди транспортное средство останавливается при включении указателя поворота.
Средство для решения проблем
[0006]
Настоящее изобретение решает вышеупомянутую проблему посредством: определения, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрестка; когда движущееся впереди транспортное средство движется за пределами упомянутой области, определения, освещён ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги; и когда указатель поворота освещён, выполнении второй помощи при вождении, отличной от первой помощи при вождении, для следования за движущимся впереди транспортным средством.
Эффекты изобретения
[0007]
Согласно настоящему изобретению, в соответствии с ситуацией с движущимся впереди транспортным средством может быть выполнена надлежащая помощь при вождении , и могут быть смягчены неприятные ощущения, вызываемые у пользователей рассматриваемого транспортного средства.
Краткое описание чертежей
[0008]
На фиг.1 показана блок–схема конфигурации системы помощи при вождении в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 2 является схемой для описания примера процесса помощи при вождении в первом варианте осуществления.
Фиг.3 – блок–схема, иллюстрирующая процедуру управления, выполняемую системой помощи при вождении по первому варианту осуществления.
Фиг.4 – схема для описания примера процесса помощи при вождении во втором варианте осуществления настоящего изобретения.
Фиг. 5 является схемой для описания другого примера процесса помощи при вождении во втором варианте осуществления.
Фиг. 6 является схемой для описания другого примера процесса помощи при вождении во втором варианте осуществления.
На фиг.7А показана блок–схема, иллюстрирующая процедуру управления, выполняемую системой помощи при вождении во втором варианте осуществления.
На Фиг. 7B является блок–схемой, иллюстрирующей процедуру управления, выполняемую системой помощи при вождении второго варианта осуществления.
Осуществление изобретения
[0009]
Ниже со ссылкой на чертежи будут описаны варианты осуществления настоящего изобретения.
[0010]
«Первый вариант осуществления»
В настоящем варианте осуществления будет описан примерный случай, в котором устройство помощи при вождении согласно настоящему изобретению применяется в системе помощи при вождении, выполненной таким образом, что устройство помощи при вождении взаимодействует с бортовым устройством 200, установленным в транспортном средстве.
[0011]
На Фиг. 1 показана схема, иллюстрирующая конфигурацию блоков системы 1 помощи при вождении. Система 1 помощи при вождении по настоящему варианту осуществления включает в себя устройство 100 помощи при вождении и бортовое устройство 200. Варианты осуществления устройства 100 помощи при вождении по настоящему изобретению не ограничены, и устройство помощи при вождении может быть установлено в транспортном средстве или также может быть применено в устройстве портативного терминала, способном обмениваться информацией с бортовым устройством 200. Примеры такого устройства терминала включают в себя оборудование, такое как смартфон или КПК. Каждое из системы 1 помощи при вождении, устройства 100 помощи при вождении, бортового устройства 200 и различных устройств, включенных в них, могут представлять собой компьютер, который включает в себя блок арифметической обработки, такой как один или более ЦП, и выполняет арифметическую обработку.
[0012]
Сначала будет описано бортовое устройство 200.
Бортовое устройство 200 по настоящему варианту осуществления включает в себя контроллер 210 транспортного средства, навигационное устройство 220, устройство 230 обнаружения объектов и устройство 240 вывода. Эти устройства, которые составляют бортовое устройство 200, соединены друг с другом через локальную сеть контроллера (CAN) или другую бортовую локальную сеть для обмена информацией между собой. Бортовое устройство 200 может обмениваться информацией с устройством 100 помощи при вождении через такую бортовую локальную сеть. Контроллер 210 транспортного средства управляет устройством 240 вывода, устройством 260 привода и устройством 270 рулевого управления.
[0013]
Контроллер 210 транспортного средства по настоящему варианту осуществления снабжен устройством 250 обнаружения. Устройство 250 обнаружения имеет датчик 251 угла поворота рулевого колеса, датчик 252 скорости транспортного средства и датчик 253 ориентации. Датчик 251 угла поворота рулевого колеса обнаруживает информацию о величине рулевого управления, скорости рулевого управления, ускорении рулевого управления и тому подобном и выводит результаты обнаружения в контроллер 210 транспортного средства. Датчик 252 скорости транспортного средства обнаруживает скорость и/или ускорение транспортного средства и выводит результаты обнаружения на контроллер 210 транспортного средства. Датчик 253 ориентации определяет положение транспортного средства, угол наклона транспортного средства, угол поворота транспортного средства и угол крена транспортного средства и выводит результаты обнаружения на контроллер 210 транспортного средства. Датчик 253 ориентации включает в себя гироскопический датчик.
[0014]
Контроллер 210 транспортного средства по настоящему варианту осуществления, который является бортовым компьютером, таким как блок управления двигателем (ECU), электронным образом управляет вождением транспортного средства. Транспортное средство может быть, например, электромобилем, имеющим в качестве источника движущей силы при движении электродвигатель, автомобилем с двигателем внутреннего сгорания в качестве источника движущей силы при движении, или гибридным автомобилем, имеющим в качестве источников движущей силы при движении как электродвигатель, так и двигатель внутреннего сгорания.. Примеры электромобиля или гибридного автомобиля, имеющего электродвигатель в качестве источника движущей силы при движении, включают в себя устройства, в которых источником питания для электродвигателя является вторичная батарея, и типа, в котором источником питания для электродвигателя является топливный элемент.
[0015]
Устройство 260 привода по настоящему варианту осуществления включает в себя приводной механизм рассматриваемого транспортного средства. Приводной механизм включает в себя электродвигатель и/или двигатель внутреннего сгорания в качестве вышеописанных источников движущей силы при движении, устройство передачи мощности, включающее в себя ведущий вал, и автоматическую коробку передач, которая передаёт выходной сигнал от источника или источников движущей силы при движении на ведущие колеса, тормозное устройство 261, которое тормозит колеса, и другие необходимые компоненты. Устройство 260 привода выполняет управление движением, которое включает в себя ускорение и замедление транспортного средства, посредством формирования управляющих сигналов для этих компонентов механизма привода на основании входных сигналов при операции акселератором и операции тормозом, а также управляющих сигналов, полученных от контроллера 210 транспортного средства или устройства 100 помощи при вождении. Управление движением, включающее в себя ускорение и замедление транспортного средства, может выполняться в автоматическом или автономном режиме путем передачи управляющей информации в устройство 260 привода. В случае гибридного автомобиля отношение выходного крутящего момента на электродвигателе и выходного крутящего момента на двигателе внутреннего сгорания в соответствии с состоянием движения транспортного средства также передается на устройство 260 привода.
[0016]
Устройство 270 рулевого управления по настоящему варианту осуществления включает в себя рулевой исполнительный механизм. Рулевой исполнительный механизм включает в себя мотор и другие необходимые компоненты, прикрепленные к валу колонки рулевого управления. Устройство 270 рулевого управления выполняет управление изменением направления движения транспортного средства на основании управляющих сигналов, полученных от контроллера 210 транспортного средства, или входных сигналов вследствие операции рулевым управлением. Контроллер 210 транспортного средства передает управляющую информацию, которая включает в себя величину рулевого управления, на устройство 270 рулевого управления, чтобы таким образом выполнять управление рулевым управлением рассматриваемого транспортного средства так, чтобы рассматриваемое транспортное средство двигалось по маршруту движения. В дополнение или в качестве альтернативы, устройство 100 помощи при вождении может выполнять управление направлением движения транспортного средства посредством управления величиной торможения для каждого колеса транспортного средства. В этом случае контроллер 210 транспортного средства передает управляющую информацию, которая включает в себя величину торможения для каждого колеса, в тормозное устройство 261, таким образом, чтобы выполнять управление направлением движения транспортного средства. Управление устройством 260 привода и/или управление устройством 270 рулевого управления может быть осуществляться полностью автоматизированным или автономным способом или в виде помощи в операции вождения (операции движения) для водителя. Управление устройством 260 привода и управление устройством 270 рулевого управления могут быть приостановлены/отменены операцией вмешательства со стороны водителя. Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства в соответствии с процессом помощи при вождении, выполняемым процессором 11.
[0017]
Бортовое устройство 200 по настоящему варианту осуществления включает в себя навигационное устройство 220. Навигационное устройство 220 рассчитывает маршрут из текущего положения рассматриваемого транспортного средства до пункта назначения. Схема вычисления маршрута может быть известной на момент подачи настоящей заявки схемой на основе алгоритма поиска графа, такого как алгоритм Дейкстры или алгоритм поиска A*. Рассчитанный маршрут передается в контроллер 210 транспортного средства для использования для помощи при вождении рассматриваемого транспортного средства. Вычисленный маршрут также выводится в качестве информации указаний в отношении маршрута через устройство 240 вывода, которое будет описано ниже.
Навигационное устройство 220 включает в себя устройство 221 обнаружения положения. Устройство 221 обнаружения положения отвечает за глобальную систему определения местоположения (GPS) и обнаруживает положение движения (широта/долгота) транспортного средства.
[0018]
Навигационное устройство 220 включает в себя доступную картографическую информацию 222 и дорожную информацию 223. Достаточно того, чтобы картографическая информация 222 и дорожная информация 223 могут быть прочитаны навигационным устройством 220. Картографическая информация 222 и дорожная информация 223 могут быть сохранены в базе данных, выполненной с возможностью быть физически отдельной от навигационного устройства 220, или также могут быть сохранены на сервере, с которого сохраненная информация может быть считана через устройство 30 связи (или устройство связи, предусмотренное в бортовом устройстве 200).
Картографическая информация 222 является так называемой электронной картой, которая представляет информацию, в которой с картографической информацией связаны широта и долгота. Картографическая информация 222 имеет дорожную информацию 223, которая связана с каждой точкой.
[0019]
Дорожная информация 223 определяется узлами и связями, соединяющими узлы между собой. Дорожная информация 223 включает в себя информацию для указания дороги по положению/области дороги, информацию о типе дороги и ширине дороги для каждой дороги и информацию о форме дороги. Дорожная информация 223 хранится таким образом, что идентификационная информация каждой дорожной связи связана с положением перекрестка, направлением выезда на перекресток, типом перекрестка и другой информацией, относящейся к перекрестку. В дополнение или в качестве альтернативы, дорожная информация 223 может храниться таким образом, что идентификационная информация каждого участка дороги связана с типом дороги, шириной дороги, формой дороги, с тем, разрешено ли движение в прямом направлении, с отношением приоритетности при движении, с тем, разрешён ли обгон (разрешено ли изменение полосы движения на смежную полосу движения) и с другой информацией в отношении дороги. В варианте осуществления, дорожная информация 223 содержит информацию о том, разрешен ли обгон, на основании правил дорожного движения.
[0020]
Навигационное устройство 220 задает маршрут движения, по которому движется рассматриваемое транспортное средство, на основании текущего положения рассматриваемого транспортного средства, обнаруживаемого устройством 221 обнаружения положения. Маршрут движения представляет собой запланированный маршрут движения для рассматриваемого транспортного средства и/или маршрут движения, по которому фактически двигалось рассматриваемое транспортное средство. Маршрут движения также может быть маршрутом к пункту назначения, указанному пользователем, или маршрутом к пункту назначения, оцененным на основании истории движения рассматриваемого транспортного средства/пользователя. Маршрут движения, по которому движется рассматриваемое транспортное средство, может указываться для каждой дороги, указываться для каждой дороги, на которой обозначено направление въезда/выезда, или указываться для каждой полосы, по которой фактически движется рассматриваемое транспортное средство. Навигационное устройство 220 обращается к дорожной информации 223, которая будет описана ниже, для указания участка дороги для каждой полосы маршрута движения, по которому движется рассматриваемое транспортное средство.
Маршрут движения включает в себя указание информации (информации о координатах) для одной или более точек, через которые транспортное средство будет двигаться в будущем. Маршрут движения включает в себя по меньшей мере точку, которая предлагает следующее положение движения, в которое движется рассматриваемое транспортное средство. Маршрут движения может состоять из непрерывной линии или также может состоять из отдельных точек. Хотя это и не ограничено конкретно, маршрут движения определяется идентификатором дороги, идентификатором полосы движения и/или идентификатором участка движения. Эти идентификатор дороги, идентификатор полосы движения и идентификатор участка движения определены в картографической информации 222 и/или в дорожной информации 223.
[0021]
Бортовое устройство 200 включает в себя устройство 230 обнаружения объектов. Устройство 230 обнаружения объектов обнаруживает ситуацию вокруг рассматриваемого транспортного средства. Устройство 230 обнаружения объектов рассматриваемого транспортного средства обнаруживает присутствие и положения присутствующих объектов, включая препятствия, которые могут присутствовать вокруг рассматриваемого транспортного средства. Хотя это не ограничено конкретно, устройство 230 обнаружения объектов включает в себя камеру 231. Камера 231 представляет собой, например, устройство формирования изображений, содержащее элемент формирования изображений, такой как ПЗС. Камера 231 также может быть инфракрасной камерой или стереокамерой. Камера 231 расположена в определенном положении на рассматриваемом транспортном средстве и снимает изображения объектов вокруг рассматриваемого транспортного средства. Термин «вокруг рассматриваемого транспортного средства» в контексте настоящего описания охватывает понятия «впереди рассматриваемого транспортного средства», «сзади рассматриваемого транспортного средства», «сбоку от рассматриваемого транспортного средства с левой стороны» и «сбоку от рассматриваемого транспортного средства с правой стороны». Объекты включают в себя двумерные знаки, такие как линии остановки или линии разграничения полос движения, нанесённые на поверхности дороги. Объекты включают в себя трехмерные объекты. Объекты включают в себя стационарные объекты, такие как дорожные знаки. Объекты включают в себя движущиеся объекты, такие как пешеходы, двухколесные транспортные средства и четырехколесные транспортные средства (другие транспортные средства). Объекты включают в себя дорожные конструкции, такие как ограждения, разделительные полосы и бордюрные камни.
[0022]
Устройство 230 обнаружения объектов может анализировать данные изображения и идентифицировать тип объекта на основании результата анализа. Устройство 230 обнаружения объектов использует метод сопоставления с образцом или другой подобный метод, чтобы идентифицировать, является ли объект, включенный в данные изображения, транспортным средством, пешеходом, дорожным знаком или двумерным знаком, нанесенным на поверхности дороги. Устройство 230 обнаружения объектов обрабатывает полученные данные изображения, чтобы определить расстояние от рассматриваемого транспортного средства до объекта, присутствующего в окружении рассматриваемого транспортного средства, на основании положения объекта. В частности, устройство 230 обнаружения объектов получает взаимное расположение между объектом и рассматриваемым транспортным средством.
[0023]
Устройство 230 обнаружения объектов может включать в себя радарное устройство 232. Примеры радарного устройства 232 включают в себя такие, как радар миллиметрового диапазона, лазерный радар, ультразвуковой радар и лазерный дальномер, схемы которых известны на момент подачи настоящей заявки. Устройство 230 обнаружения объектов обнаруживает присутствие или отсутствие объектов, положения объектов, расстояния до объектов, относительные скорости объектов по отношению к рассматриваемому транспортному средству на основании принятых сигналов от радарного устройства 232. Устройство 230 обнаружения объектов может обнаруживать присутствие или отсутствие объектов, положения объектов, расстояния до объектов и относительные скорости объектов по отношению к рассматриваемому транспортному средству на основании результатов кластеризации информации облака точек, полученной с использованием лазерного радара.
[0024]
Когда другое транспортное средство и рассматриваемое транспортное средство способны осуществлять связь между транспортными средствами, устройство 230 обнаружения объектов может получать скорость транспортного средства и ускорение другого транспортного средства, которые обнаруживаются датчиком скорости транспортного средства у другого транспортного средства, и/или факт присутствия другого транспортного средства, в качестве информации об объектах. В дополнение или в качестве альтернативы, устройство 230 обнаружения объектов может получать информацию об объектах, которая включает в себя положение, скорость и ускорение другого транспортного средства, от внешних устройств интеллектуальных транспортных систем (ITS).
[0025]
Бортовое устройство 200 включает в себя устройство 240 вывода. Устройство 240 вывода включает в себя дисплей 241 и громкоговоритель 242. Устройство 240 вывода выводит пользователю или пользователям окружающих транспортных средств различные элементы информации, относящиеся к помощи при вождении. Устройство 240 вывода выводит информацию, относящуюся к управлению движением. Устройство 240 вывода заранее информирует пользователей рассматриваемого транспортного средства о том, что будет выполняться операция рулевого управления и/или ускорения или замедления, посредством дисплея 241 и/или громкоговорителя 242, в качестве информации, представляющей управляющую информацию для движения рассматриваемого транспортного средства, по маршруту движения (целевому маршруту). В дополнение или в качестве альтернативы, пользователи рассматриваемого транспортного средства или пользователи других транспортных средств могут быть заранее проинформированы о таких элементах информации, относящихся к помощи при вождении, посредством наружных ламп и/или внутренних ламп. В дополнение или в качестве альтернативы, устройство 240 вывода может выводить различные элементы информации, относящиеся к помощи при вождении, на внешние устройства интеллектуальных транспортных систем и т.п. через устройство связи (не показано). Когда маршрут движения корректируется, устройство вывода может выводить информацию о том, что маршрут движения скорректирован, и информацию о скорректированном маршруте движения.
[0026]
Далее будет описано устройство 100 помощи при вождении.
Устройство 100 помощи при вождении включает в себя устройство 10 управления, устройство 20 вывода и устройство 30 связи. Устройство 20 вывода имеет те же функции, что и описанное выше устройство 240 вывода бортового устройства 200. В качестве компонентов устройства 20 вывода используются дисплей 241 и громкоговоритель 242. Устройство 10 управления и устройство 20 вывода могут обмениваться информацией друг с другом по проводной или беспроводной линии связи. Устройство 30 связи выполняет обмен информацией с бортовым устройством 200, обмен информацией в устройстве 100 помощи при вождении и обмен информацией с внешним окружением системы 1 помощи при вождении.
[0027]
Сначала будет описано устройство 10 управления.
Устройство 10 управления включает в себя процессор 11. Процессор 11 является вычислительным устройством, которое выполняет процесс помощи при вождении. В частности, процессор 11 представляет собой компьютер, содержащий постоянное запоминающее устройство (ПЗУ), в котором хранятся программы для выполнения процесса помощи при вождении, центральный процессор (ЦП) в качестве операционной схемы, которая выполняет программы, хранящиеся в ПЗУ, чтобы служить в качестве устройства 100 помощи при вождении, и оперативное запоминающее устройство (ОЗУ), которое служит в качестве доступного запоминающего устройства.
[0028]
Процессор 11 согласно настоящему варианту осуществления выполняет следующие процессы:
(1) процесс распознавания присутствия движущегося впереди транспортного средства (процесс распознавания движущегося впереди транспортного средства);
(2) процесс сохранения постоянного расстояния между транспортными средствами до движущегося впереди транспортного средства при распознавании движущегося впереди транспортного средства (процесс сохранения расстояния между транспортными средствами);
(3) процесс определения, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрестка, при распознавании движущегося впереди транспортного средства (процесс определения положения движения);
(4) процесс определения, освещён ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, когда движущееся впереди транспортное средство движется за пределами области, включающей в себя перекресток и окрестности перекрестка (процесс обнаружения освещения указателя поворота); и
(5) процесс замедления рассматриваемого транспортного средства при определении того, что указатель поворота со стороны обочины дороги освещён (процесс замедления).
[0029]
Процессор 11 выполняет каждую из вышеупомянутых функций посредством взаимодействия программного обеспечения для реализации каждой функции или для выполнения каждого процесса и вышеописанного аппаратного обеспечения.
[0030]
Сначала будет описан процесс распознавания движущегося впереди транспортного средства .
Процессор 11 определяет, присутствует ли движущееся впереди транспортное средство, которое движется впереди рассматриваемого транспортного средства, на основании результата обнаружения посредством устройства 230 обнаружения объектов. Например, процессор 11 выполняет обработку изображения для изображения, снятого камерой 231, которая установлена на передней части рассматриваемого транспортного средства. Когда захваченное изображение включает в себя движущееся впереди транспортное средство, процессор 11 определяет, что движущееся впереди транспортное средство присутствует. С другой стороны, когда захваченное изображение не включает в себя движущееся впереди транспортное средство, процессор 11 определяет, что движущееся впереди транспортное средство не присутствует. Движущиеся впереди транспортные средства включают в себя не только транспортные средства, которые движутся впереди рассматриваемого транспортного средства, но также и транспортные средства, которые останавливаются впереди рассматриваемого транспортного средства. Способ определения присутствия движущегося впереди транспортного средства не ограничен вышеописанным способом. Например, определение может быть выполнено с использованием результата обнаружения радарного устройства 232, установленного в передней части рассматриваемого транспортного средства, или результата получения информации об объектах, полученной посредством связи между транспортными средствами.
[0031]
Далее будет описан процесс сохранения расстояния между транспортными средствами.
При распознавании движущегося впереди транспортного средства процессор 11 формирует управляющую команду для управления движением рассматриваемого транспортного средства на основании результата обнаружения посредством устройства 230 обнаружения объектов, для сохранения постоянного расстояния между рассматриваемым транспортным средством и движущимся впереди транспортным средством (расстояния между транспортными средствами). Например, процессор 11 использует результат обнаружения радарного устройства 232, установленного в передней части транспортного средства. Используя взаимное расположение с движущимся впереди транспортным средством и относительную скорость движущегося впереди транспортного средства, процессор 11 формирует управляющую команду таким образом, что расстояние между транспортными средствами относительно движущегося впереди транспортного средства поддерживается постоянным. Управляющая команда включает в себя команду для управления устройством 260 привода (например, команду для управления скоростью транспортного средства, ускорением и/или замедлением). Процессор 11 отправляет сформированную управляющую команду в контроллер 210 транспортного средства через устройство 30 связи. Контроллер 210 транспортного средства управляет движением рассматриваемого транспортного средства в соответствии с процессом помощи при вождении таким образом, что рассматриваемое транспортное средство поддерживает постоянное расстояние между транспортными средствами относительно движущегося впереди транспортного средства.
[0032]
Процесс распознавания движущегося впереди транспортного средства и процесс удержания расстояния между транспортными средствами не ограничены вышеописанными способами, и может надлежащим образом использоваться процесс распознавания движущегося впереди транспортного средства или процесс удержания расстояния между транспортными средствами, известный на момент подачи настоящей заявки.
[0033]
Далее со ссылкой на фиг. 2 будет описан процесс определения положения движения.
Фиг. 2 является схемой для описания примера процесса помощи при вождении в настоящем варианте осуществления. Рассматриваемое транспортное средство V1 движется по дороге с одной полосой движения в каждом направлении (полоса L1 движения), а впереди рассматриваемого транспортного средства V1 движется движущееся впереди транспортное средство V2. Рассматриваемое транспортное средство V1 следует за движущимся впереди транспортным средством V2, сохраняя постоянное расстояние между транспортными средствами относительно движущегося впереди транспортного средства V2 (расстояние D2) посредством вышеописанного процесса поддержания расстояния между транспортными средствами. Полоса L1 движения включена в дорогу, которая ведет к перекрестку J1. Фиг. 2 иллюстрирует ситуацию, в которой рассматриваемое транспортное средство V1 и движущееся впереди транспортное средство V2 достигнут перекрестка J1, если продолжат движение по полосе L1 движения. В примере по фиг. 2 полоса L1 движения показана как прямая дорога, но форма полосы L1 движения не ограничена конкретно.
[0034]
Когда присутствует движущееся впереди транспортное средство, процессор 11 сначала указывает пересечение, на котором движущееся впереди транспортное средство может повернуть вправо или влево. Например, процессор 11 использует запланированный маршрут движения рассматриваемого транспортного средства и положение движения рассматриваемого транспортного средства, вычисленные навигационным устройством 220. Используя запланированный маршрут движения и положение движения, процессор 11 определяет пересечение, расположенное ближе всего к текущему положению движения, из пересечений, имеющихся на запланированном маршруте движения. В частности, процессор 11 указывает номер узла, который представляет пересечение в картографической информации 222. Способ указания пересечения не ограничен вышеописанным способом. Например, среди множества пересечений, имеющихся на заданном расстоянии от положения движения рассматриваемого транспортного средства, в качестве пересечения также может быть указано первое пересечение, которое пройдет рассматриваемое транспортное средство, или первое пересечение, на котором рассматриваемое транспортное средство повернет вправо или влево, на запланированном маршруте движения. В примере по фиг. 2 процессор 11 определяет пересечение J1 с использованием вышеописанного способа.
[0035]
Затем, используя результат обнаружения устройства 221 обнаружения положения и результат обнаружения устройства 230 обнаружения объектов, процессор 11 вычисляет положение (координаты) движения движущегося впереди транспортного средства в картографической информации 222. Например, процессор 11 вычисляет положение движения движущегося впереди транспортного средства, отражая взаимное расположение движущегося впереди транспортного средства и рассматриваемого транспортного средства в положение движения рассматриваемого транспортного средства в картографической информации 222. В примере по фиг. 2 процессор 11 вычисляет координаты движущегося впереди транспортного средства V2 в картографической информации 222.
[0036]
Затем процессор 11 вычисляет расстояние от движущегося впереди транспортного средства до перекрестка на основании картографической информации 222. Например, процессор 11 вычисляет расстояние от движущегося впереди транспортного средства до перекрестка в картографической информации 222 на основании координат движущегося впереди транспортного средства, координат перекрестка и участка полосы движения. В частности, процессор 11 вычисляет расстояние участка, имеющегося между координатами движущегося впереди транспортного средства и координатами пересечения. Вычисляемое расстояние является расстоянием, соответствующим фактической форме дороги, а не линейным расстоянием, соединяющим два набора координат. Координаты пересечения не ограничены координатами узла, включенного в картографическую информацию 222, и могут быть, например, координатами линии остановки, предусмотренной перед пересечением. В примере по фиг. 2 процессор 11 вычисляет расстояние D1 от движущегося впереди транспортного средства V2 до перекрестка J1 на основании координат движущегося впереди транспортного средства V2, координат перекрестка J1 и линии полосы L1 движения.
[0037]
Способ вычисления расстояния от движущегося впереди транспортного средства до перекрестка не ограничен вышеописанным способом. Например, процессор 11 также может вычислять расстояние от рассматриваемого транспортного средства до перекрестка, используя координаты рассматриваемого транспортного средства, координаты перекрестка и информацию об участке полосы движения. Затем процессор 11 может вычислить расстояние от движущегося впереди транспортного средства до перекрестка путем вычитания расстояния между транспортными средствами для рассматриваемого транспортного средства и движущегося впереди транспортного средства, которое является результатом обнаружения устройства 230 обнаружения объектов, из вычисленного расстояния.
[0038]
Процессор 11 определяет, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрестка, в соответствии с тем, превышает ли расстояние от движущегося впереди транспортного средства до перекрестка заданную пороговую величину. Когда расстояние от движущегося впереди транспортного средства до перекрестка превышает заданную пороговую величину, процессор 11 определяет, что движущееся впереди транспортное средство движется за пределами области, включающей в себя перекресток и окрестности перекрестка. С другой стороны, когда вычисленное расстояние не превышает заданную пороговую величину, процессор 11 определяет, что движущееся впереди транспортное средство движется в области, включающей в себя перекресток и окрестности перекрестка. В примере по фиг. 2, когда расстояние D1 превышает заданную пороговую величину, процессор 11 определяет, что движущееся впереди транспортное средство V2 движется за пределами области, включающей в себя перекресток J1 и окрестности перекрестка J1.
[0039]
Окрестности перекрестка относятся к области до перекрестка, в которой указатель поворота может быть освещён для указания поворота вправо или влево на перекрестке. В примере по фиг. 2, окрестности перекрестка J1 включают в себя область (область R1), в которой водитель выполняет операцию указателем поворота с левой стороны таким образом, чтобы он был освещён до перекрестка J1, для поворота влево на перекрестке J1. Окрестности перекрестка J1 относятся, например, к области за 30 м до перекрестка от линии остановки на перекрестке.
[0040]
Процессор 11 может устанавливать вышеописанную заданную пороговую величину в единицах по несколько метров и может соответствующим образом устанавливать заданную пороговую величину в соответствии с типом перекрестка, типом дороги, количеством полос движения, интенсивностью движения и т.д. Процессор 11 может устанавливать заданную пороговую величину для каждой наземной зоны, в которой движется рассматриваемое транспортное средство. Предпочтительно, заданная пороговая величина устанавливается с учетом расстояния между пересечениями. Предпочтительно, например, минимальное значение заданной пороговой величины устанавливается равным расстоянию от линии остановки на пересечении до положения, в котором указатель поворота освещается перед перекрестком, а максимальное значение заданной пороговой величины устанавливается равным расстоянию между перекрестками. Это позволяет точно определить, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрестка.
[0041]
Далее будет описан процесс обнаружения освещения указателя поворота.
Когда движущееся впереди транспортное средство движется за пределами области, включающей в себя перекресток и окрестности перекрестка, процессор 11 определяет, освещён ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, на основании результата обнаружения устройства 230 обнаружения объектов. Например, процессор 11 обнаруживает освещение указателя поворота со стороны обочины дороги по изображению, захваченному камерой 231, впереди рассматриваемого транспортного средства. В частности, процессор 11 может обнаруживать освещение указателя поворота в соответствии с яркостью одного или более пикселей в захваченном изображении, которые представляют указатель поворота. Когда величина изменения яркости превышает заданную пороговую величину в течение заданного времени, процессор 11 обнаруживает освещение указателя поворота. «Освещение» указателя поворота включает в себя «мигание» указателя поворота. В примере по фиг. 2 процессор 11 обнаруживает, что освещён указатель I1 поворота с левой стороны движущегося впереди транспортного средства V2.
[0042]
В случае левостороннего движения обочина дороги относится к участку в виде пояса, предусмотренному для соединения с левой стороной полосы L1 движения по отношению к направлению движения. В примере по фиг. 2, обочина E1 дороги предусмотрена на левой стороне полосы L1 движения по отношению к направлению движения. Соответственно, указатель I1 поворота с левой стороны движущегося впереди транспортного средства V2 является тем указателем поворота, который находится со стороны обочины E1 дороги из указателей поворота, предусмотренных с правой и левой стороны движущегося впереди транспортного средства V2.
[0043]
Наконец, будет описан процесс замедления.
При определении, что освещён указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, процессор 11 формирует управляющую команду для замедления рассматриваемого транспортного средства. В частности, процессор 11 формирует управляющую команду для прекращения вышеописанного процесса сохранения расстояния между транспортными средствами и для замедления рассматриваемого транспортного средства. Управляющая команда включает в себя команду для управления устройством 260 привода (например, команду для управления скоростью и/или ускорением транспортного средства). Процессор 11 отправляет сформированную управляющую команду на контроллер 210 транспортного средства посредством устройства 30 связи. Контроллер 210 транспортного средства управляет движением рассматриваемого транспортного средства в соответствии с процессом помощи при вождении таким образом, что рассматриваемое транспортное средство замедляется. В примере по Фиг. 2, когда движущееся впереди транспортное средство V2 собирается остановиться на обочине E1 дороги при освещённом указателе I1 поворота с левой стороны, рассматриваемое транспортное средство V1 может заранее замедляться для увеличения расстояния между транспортными средствами относительно движущегося впереди транспортного средства V2.
[0044]
Процессор 11 выполняет вышеописанный процесс помощи при вождении таким образом, чтобы определить, находится ли положение движения движущегося впереди транспортного средства в пределах области, включающей в себя перекресток и окрестности перекрестка. Процессор 11 может определить, освещён ли указатель поворота у движущегося впереди транспортного средства для поворота на перекрестке вправо или влево. Это может предотвратить прекращение следования рассматриваемого транспортного средства за движущимся впереди транспортным средством даже когда указатель поворота у движущегося впереди транспортного средства освещён для остановки на обочине дороги. Кроме того, процессор 11 может предварительно оценить движение движущегося впереди транспортного средства до того, как движущееся впереди транспортное средство остановится на обочине дороги. Это позволяет выполнять помощь при вождении с запасом до того, как движущееся впереди транспортное средство замедлится, изменив направление влево.
[0045]
Фиг. 3 представляет собой схему, иллюстрирующую процедуру управления, выполняемую системой помощи при вождении по настоящему варианту выполнения. Процесс управления для помощи при вождении согласно настоящему варианту выполнения будет описан со ссылкой на блок-схему по Фиг. 3. Процесс управления для помощи при вождении, описанный ниже, выполняется повторно с заданными временными интервалами.
На этапе S101 процессор 11 определяет, присутствует ли движущееся впереди транспортное средство. Например, процессор 11 получает изображение, захваченное впереди рассматриваемого транспортного средства, от устройства 230 обнаружения объектов рассматриваемого транспортного средства. Затем процессор 11 выполняет обработку изображения в отношении захваченного изображения для определения, присутствует ли движущееся впереди транспортное средство. Когда определено, что движущееся впереди транспортное средство присутствует, процесс переходит к этапу S102, а при определении того, что движущегося впереди транспортного средства нет, процесс управления для помощи при вождении завершается.
[0046]
На этапе S102 процессор 11 формирует управляющую команду для того, чтобы рассматриваемое транспортное средство следовало за движущимся впереди транспортным средством, сохраняя при этом постоянным расстояние между транспортными средствами по отношению к движущемуся впереди транспортному средству. Процессор 11 получает относительную скорость движущегося впереди транспортного средства из результата обнаружения радарного устройства 232 рассматриваемого транспортного средства. Процессор 11 формирует управляющую команду для следования за движущимся впереди транспортным средством таким образом, чтобы получаемая относительная скорость оставалась постоянной, и отправляет сформированную управляющую команду на контроллер 210 транспортного средства.
[0047]
На этапе S103 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S102. Это позволяет рассматриваемому транспортному средству следовать за движущимся впереди транспортным средством, сохраняя при этом постоянное расстояние между транспортными средствами.
[0048]
На этапе S104 процессор 11 определяет, движется ли движущееся впереди транспортное средство за пределами зоны, включающей в себя перекресток и окрестности перекрестка. Например, процессор 11 указывает в картографической информации 222 перекресток, расположенный ближе всего к текущему положению движения движущегося впереди транспортного средства. Затем процессор 11 вычисляет расстояние от текущего положения движения движущегося впереди транспортного средства до указанного перекрестка. Если вычисленное расстояние превышает заданную пороговую величину, процессор 11 определяет, что движущееся впереди транспортное средство движется за пределами области, включающей в себя перекресток и окрестности перекрестка. С другой стороны, если вычисленное расстояние не превышает заданную пороговую величину, процессор 11 определяет, что движущееся впереди транспортное средство движется в области, включающей в себя перекресток и окрестности перекрестка. Когда движущееся впереди транспортное средство движется за пределами области, включающей в себя перекресток и окрестности перекрестка, процесс переходит к этапу S104. С другой стороны, когда движущееся впереди транспортное средство движется в области, включающей в себя перекресток и окрестности перекрестка, процесс управления для помощи при вождении завершается.
[0049]
На этапе S105 процессор 11 определяет, освещён ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги. Например, процессор 11 определяет, светится ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, по изображению, снятому впереди рассматриваемого транспортного средства. Если определено, что указатель поворота со стороны обочины дороги освещён, процесс переходит к этапу S106. С другой стороны, если определено, что указатель поворота со стороны обочины дороги не освещён, процесс управления для помощи при вождении завершается.
[0050]
На этапе S106 процессор 11 формирует управляющую команду для замедления и отправляет сформированную управляющую команду в контроллер 210 транспортного средства. Процессор 11 определяет, что движущееся впереди транспортное средство собирается остановиться на обочине дороги, на основании результата определения на этапе S104 и результата определения на этапе S105.
[0051]
На этапе S107 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S106. Это позволяет рассматриваемому транспортному средству снизить скорость, чтобы увеличить расстояние между транспортными средствами относительно движущегося впереди транспортного средства. После того, как контроллер 210 транспортного средства управляет рассматриваемым транспортным средством для замедления, процесс управления для помощи при вождении завершается.
[0052]
Как описано выше, устройство 100 помощи при вождении согласно настоящему варианту осуществления включает в себя устройство 30 связи, выполненное с возможностью получения результата обнаружения устройства 230 обнаружения объектов, которое обнаруживает ситуацию вокруг рассматриваемого транспортного средства, и процессор 11, выполненный с возможностью выполнения процесса помощи при вождении для рассматриваемого транспортного средства на основании результата обнаружения устройства 230 обнаружения объекта. Процессор 11 определяет, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрестка. Затем, если движущееся впереди транспортное средство движется за пределами упомянутой области, процессор 11 определяет, освещён ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги. Когда указатель поворота движущегося впереди транспортного средства со стороны обочины дороги освещён, процессор 11 формирует управляющую команду для выполнения помощи при вождении, отличную от помощи при вождении для следования за движущимся впереди транспортным средством, и передает сформированную управляющую команду на контроллер 210 транспортного средства. Это может предотвратить следование рассматриваемого транспортного средства за движущимся впереди транспортным средством, даже когда у движущегося впереди транспортного средства освещён указатель поворота для остановки на обочине дороги, и может быть смягчено неприятное ощущение, причиняемое пользователям рассматриваемого транспортного средства.
[0053]
В настоящем варианте осуществления помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством, представляет собой помощь при вождении для управления скоростью транспортного средства для рассматриваемого транспортного средства. Это позволяет выполнить соответствующую помощь при вождении в соответствии с ситуацией с движущимся впереди транспортным средством.
[0054]
В настоящем варианте осуществления помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством, представляет собой помощь при вождении для замедления рассматриваемого транспортного средства. Это может увеличить расстояние между транспортными средствами относительно движущегося впереди транспортного средства до того, как движущееся впереди транспортное средство остановится на обочине дороги, и может быть выполнена помощь в движении для уменьшения ощущения риска у пользователей.
[0055]
В настоящем варианте осуществления, когда рассматриваемое транспортное средство следует за движущимся впереди транспортным средством, при этом сохраняя постоянное расстояние между транспортными средствами относительно движущегося впереди транспортного средства, помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством, представляет собой помощь при вождении для увеличения расстояния между транспортными средствами относительно движущегося впереди транспортного средства. Это может увеличить расстояние между транспортными средствами относительно движущегося впереди транспортного средства, даже когда движущееся впереди транспортное средство замедляется для остановки на обочине дороги. В результате помощь при вождении может быть выполнена с запасом для последующих действий.
[0056]
«Второй вариант осуществления»
Ниже будет описано устройство 110 помощи при вождении согласно второму варианту осуществления. Устройство 110 помощи при вождении согласно настоящему варианту осуществления включает в себя устройство 10 управления, устройство 20 вывода и устройство 30 связи. Устройство 10 управления включает в себя процессор 111. Процессор 111 имеет ту же конфигурацию, что и процессор 11 в соответствии с вышеописанным вариантом осуществления, за исключением того, что отличается процесс помощи при вождении. Соответственно, здесь будет учтено описание вышеописанного варианта осуществления, приведённое со ссылкой на фиг. 1.
[0057]
Процессор 111 согласно настоящему варианту осуществления выполняет следующие процессы:
(1) процесс распознавания присутствия движущегося впереди транспортного средства (процесс распознавания движущегося впереди транспортного средства);
(2) процесс следования по маршруту движения движущегося впереди транспортного средства при распознавании движущегося впереди транспортного средства (процесс следования по маршруту движения);
(3) процесс сохранения постоянного расстояния между транспортными средствами относительно движущегося впереди транспортного средства при распознавании движущегося впереди транспортного средства (процесс сохранения расстояния между транспортными средствами);
(4) процесс определения, является ли движущееся впереди транспортное средство автобусом, при распознавании движущегося впереди транспортного средства (процесс определения автобуса);
(5) процесс определения, движется ли движущееся впереди транспортное средство в области, включающей в себя автобусную остановку и окрестности автобусной остановки, когда движущееся впереди транспортное средство является автобусом (процесс определения положения движения автобуса);
(6) процесс определения, освещён ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, когда движущееся впереди транспортное средство движется в области, включающей в себя автобусную остановку и окрестности автобусной остановки (процесс обнаружения указателя поворота) ;
(7) процесс замедления рассматриваемого транспортного средства при определении, что освещён указатель поворота со стороны обочины дороги (процесс замедления);
(8) процесс отмены следования по маршруту движения движущегося впереди транспортного средства при определении, что освещён указатель поворота со стороны обочины дороги (процесс отмены следования по маршруту движения);
(9) процесс задания маршрута движения для сохранения заданного расстояния относительно противоположной стороны по отношению к обочине дороги (процесс подготовки к обгону);
(10) процесс определения, возможно ли обогнать движущееся впереди транспортное средство (процесс определения обгона); и
(11) процесс обгона движущегося впереди транспортного средства при определении возможности обгона движущегося впереди транспортного средства (процесс обгона).
[0058]
Процесс распознавания движущегося впереди транспортного средства является тем же процессом, что и процесс распознавания движущегося впереди транспортного средства, выполняемый процессором 11 в вышеописанном варианте осуществления, поэтому описание вышеописанного варианта осуществления будет учтено здесь.
[0059]
Далее будет описан процесс следования по маршруту движения.
При распознавании движущегося впереди транспортного средства процессор 111 формирует на основании результата обнаружения устройства 230 обнаружения объектов управляющую команду для рассматриваемого транспортного средства следовать по маршруту движения движущегося впереди транспортного средства. Например, процессор 111 использует результат обнаружения радарного устройства 232, установленного в передней части рассматриваемого транспортного средства. Процессор 111 формирует управляющую команду таким образом, что отношение между положением рассматриваемого транспортного средства в направлении ширины транспортного средства и положением движущегося впереди транспортного средства в направлении ширины транспортного средства является фиксированным. Управляющая команда включает в себя команду для управления устройством 270 рулевого управления или тормозным устройством 261 (например, команду для управления величиной рулевого управления рулевого управления и/или величиной торможения для каждого колеса). Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства в соответствии с процессом помощи при вождении таким образом, что маршрут движения рассматриваемого транспортного средства совпадает с маршрутом движения движущегося впереди транспортного средства.
[0060]
Процесс следования по маршруту движения не ограничен вышеописанным способом, и может быть надлежащим образом использован процесс следования по маршруту движения, известный на момент подачи настоящей заявки.
[0061]
Процесс сохранения расстояния между транспортными средствами является тем же процессом, что и процесс сохранения расстояния между транспортными средствами, выполняемый процессором 11 в вышеописанном варианте осуществления, поэтому описание вышеописанного варианта осуществления будет учтено здесь.
[0062]
Процесс определения автобуса будет описан ниже.
При распознавании движущегося впереди транспортного средства процессор 111 определяет, является ли движущееся впереди транспортное средство автобусом, на основании результата обнаружения устройства 230 обнаружения объектов. Например, процессор 111 выполняет процесс сопоставления с образцом для изображения, снятого камерой 231, установленной в передней части рассматриваемого транспортного средства, для определения того, является ли движущееся впереди транспортное средство автобусом. Размер, тип и форма автобуса особо не ограничены. Пассажиры, которые используют автобус в настоящем варианте осуществления, садятся в автобус и выходят из автобуса на автобусных остановках, предусмотренных на дороге общего пользования. Способ определения автобуса не ограничен вышеописанным способом.
[0063]
Далее процесс определения положения движения автобуса будет описан со ссылкой на фиг. 4.
Фиг.4 представляет собой схему для описания примера процесса помощи при вождении в настоящем варианте осуществления. Рассматриваемое транспортное средство V3 движется по дороге с одной полосой движения в каждом направлении (полоса L2 движения), а автобус B1 движется в качестве движущегося впереди транспортного средства впереди рассматриваемого транспортного средства V3. Рассматриваемое транспортное средство V3 следует за движущимся впереди транспортным средством, сохраняя постоянное расстояние между транспортными средствами относительно автобуса B1 (расстояние D4) посредством вышеописанного процесса сохранения расстояния между транспортными средствами. В то же время рассматриваемое транспортное средство V3 следует по маршруту движения (маршруту P1 движения), по которому двигался автобус B1, в соответствии с вышеописанным процессом следования по маршруту движения. Автобусная остановка S1 расположена перед автобусом B1 с левой стороны относительно направления движения автобуса B1. Фиг. 4 иллюстрирует ситуацию, в которой рассматриваемое транспортное средство V3 и автобус B1 достигнут автобусной остановки S1, если продолжат движение по полосе L2 движения. В примере по фиг. 4 полоса L2 движения проиллюстрирована как прямая дорога, но форма полосы L2 движения не ограничена конкретным образом.
[0064]
Когда движущееся впереди транспортное средство является автобусом, процессор 111 сначала указывает автобусную остановку, на которой может останавливаться движущееся впереди транспортное средство. Например, процессор 111 использует запланированный маршрут движения рассматриваемого транспортного средства и положение движения рассматриваемого транспортного средства, которые вычисляются навигационным устройством 220. Используя запланированный маршрут движения и положение движения, процессор 111 определяет автобусную остановку, расположенную ближе всего к текущему положению движения среди автобусных остановок, имеющихся на запланированном маршруте движения. В частности, процессор 111 указывает координаты, которые представляют автобусную остановку, в картографической информации 222. Способ указания автобусной остановки не ограничен вышеописанным способом. Например, из множества автобусных остановок, существующих в пределах заданного расстояния от положения движения рассматриваемого транспортного средства, в качестве автобусной остановки также может быть указана автобусная остановка, которую транспортное средство пройдет первой на запланированном маршруте движения. В примере по фиг. 4 процессор 111 определяет автобусную остановку S1 с использованием вышеописанного способа.
[0065]
Затем процессор 111 вычисляет положение (координаты) движения движущегося впереди транспортного средства в картографической информации 222, используя результат обнаружения устройства 221 обнаружения положения и результат обнаружения устройства 230 обнаружения объектов. Способ вычисления является тем же, что и процесс определения положения движения, выполняемый процессором 11 в соответствии с вышеописанным вариантом осуществления, поэтому описание для вышеописанного варианта осуществления будет учтено здесь.
[0066]
Затем процессор 111 вычисляет расстояние от движущегося впереди транспортного средства до автобусной остановки на основании картографической информации 222. Например, процессор 111 вычисляет расстояние от движущегося впереди транспортного средства до автобусной остановки в картографической информации 222 на основании координат движущегося впереди транспортного средства, координат автобусной остановки и участка полосы движения. В частности, процессор 111 вычисляет расстояние участка, имеющегося между координатами движущегося впереди транспортного средства и координатами автобусной остановки. Вычисленное расстояние представляет собой расстояние, соответствующее фактической форме дороги, а не линейное расстояние, соединяющее два набора координат. В примере по фиг. 4 процессор 111 вычисляет расстояние D3 от автобуса B1 до автобусной остановки S1.
[0067]
Способ вычисления расстояния от движущегося впереди транспортного средства до автобусной остановки не ограничен вышеописанным способом. Например, процессор 111 также может вычислять расстояние от рассматриваемого транспортного средства до автобусной остановки из координат рассматриваемого транспортного средства, координат автобусной остановки и информации об участке полосы движения. Затем процессор 111 может вычислить расстояние от движущегося впереди транспортного средства до автобусной остановки путём вычитания расстояния между транспортными средствами между рассматриваемым транспортным средством и движущимся впереди транспортным средством, которое является результатом обнаружения устройства 230 обнаружения объектов, из вычисленного расстояния.
[0068]
Процессор 111 определяет, движется ли движущееся впереди транспортное средство в области, включающей в себя автобусную остановку и окрестности автобусной остановки, в соответствии с тем, находится ли расстояние от движущегося впереди транспортного средства до автобусной остановки в пределах заданной пороговой величины. Если расстояние от движущегося впереди транспортного средства до автобусной остановки не превышает заданную пороговую величину, процессор 111 определяет, что движущееся впереди транспортное средство движется в области, включающей в себя автобусную остановку и окрестности автобусной остановки. С другой стороны, если вычисленное расстояние превышает заданную пороговую величину, процессор 111 определяет, что движущееся впереди транспортное средство движется за пределами области, включающей в себя автобусную остановку и окрестности автобусной остановки. В примере по фиг. 4, если расстояние D3 не превышает заданную пороговую величину, процессор 111 определяет, что автобус B1 движется в области, включающей в себя автобусную остановку S1 и окрестности автобусной остановки S1.
[0069]
Окрестности автобусной остановки относятся к области перед автобусной остановкой, в которой может быть освещён указатель поворота для остановки на автобусной остановке. В примере по фиг. 4, окрестности автобусной остановки включают в себя область, в которой водитель управляет левым указателем поворота для его освещения перед автобусной остановкой S1, чтобы остановиться на автобусной остановке S1. Окрестности автобусной остановки S1 относятся, например, к области за 30 м до автобусной остановки от дорожного знака, который указывает автобусную остановку.
[0070]
Процессор 111 может устанавливать вышеописанную заданную пороговую величину в единицах по несколько метров и может соответствующим образом устанавливать заданную пороговую величину в соответствии с типом дороги, количеством полос движения, интенсивностью движения и т.д. Процессор 111 может устанавливать заданную пороговую величину для каждой наземной области, в которой движется рассматриваемое транспортное средство. Предпочтительно заданная пороговая величина устанавливается с учетом расстояния между автобусными остановками. Предпочтительно, например, минимальное значение заданной пороговой величины устанавливается равным расстоянию от дорожного знака, указывающего автобусную остановку, до положения, в котором указатель поворота освещается перед автобусной остановкой, и максимальное значение заданной пороговой величины устанавливается равным расстоянию между автобусными остановками. Это позволяет точно определить, движется ли движущееся впереди транспортное средство в области, включающей в себя автобусную остановку и окрестности автобусной остановки.
[0071]
В настоящем варианте осуществления движущееся впереди транспортное средство может освещать указатель поворота для остановки на автобусной остановке, поскольку движущееся впереди транспортное средство является автобусом. Таким образом, процессор 111 определяет, освещает ли движущееся впереди транспортное средство указатель поворота за пределами области, включающей в себя перекресток и окрестности перекрестка, в соответствии с расстоянием от движущегося впереди транспортного средства до автобусной остановки. Например, когда расстояние от движущегося впереди транспортного средства до автобусной остановки не превышает заданное пороговое значение, движущееся впереди транспортное средство движется в окрестностях автобусной остановки. В общем, поскольку в окрестностях перекрестка не предусмотрена автобусная остановка, процессор 111 может определить, что движущееся впереди транспортное средство движется за пределами области, включающей в себя перекресток и окрестности перекрестка.
[0072]
Далее будет описан процесс обнаружения освещения указателя поворота.
Когда движущееся впереди транспортное средство движется в области, включающей в себя автобусную остановку и окрестности автобусной остановки, процессор 111 определяет, начал ли светиться указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, на основании результата обнаружения устройства 230 обнаружения объектов. Способ обнаружения освещения указателя поворота является тем же, что и процесс обнаружения освещения, выполняемый процессором 11 в соответствии с вышеописанным вариантом осуществления, поэтому описание для вышеописанного варианта осуществления будет учтено здесь. В примере по фиг. 4 указатель I2 поворота с левой стороны автобуса B1 является указателем поворота со стороны обочины E2 дороги. Процессор 111 обнаруживает, что указатель I2 поворота с левой стороны автобуса B1 освещён.
[0073]
Процесс замедления является тем же процессом, что и процесс замедления, выполняемый процессором 11 в вышеописанном варианте осуществления, поэтому описание для вышеописанного варианта осуществления будет учтено здесь.
[0074]
Далее будет описан процесс отмены следования по маршруту движения.
При определении того, что освещён указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, процессор 111 формирует управляющую команду для отмены следования по маршруту движения движущегося впереди транспортного средства. Например, процессор 111 формирует управляющую команду для движения рассматриваемого транспортного средства без влияния положения движущегося впереди транспортного средства в направлении ширины транспортного средства. Управляющая команда включает в себя команду для управления устройством 270 рулевого управления или устройством 261 торможения. Процессор 111 отправляет сформированную управляющую команду в контроллер 210 транспортного средства через устройство 30 связи. Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства в соответствии с процессом помощи при вождении таким образом, что рассматриваемое транспортное средство движется независимо от положения движущегося впереди транспортного средства в направлении ширины транспортного средства. В примере по фиг. 4 процесс отмены следования по маршруту движения, выполняемый процессором 111, позволяет рассматриваемому транспортному средству V3 следовать по маршруту движения, отличному от маршрута P1 движения, по которому двигался автобус B1.
[0075]
Далее будет описан процесс подготовки к обгону.
Процессор 111 формирует управляющую команду для движения рассматриваемого транспортного средства вблизи белой линии с правой стороны относительно направления движения рассматриваемого транспортного средства на основании результата обнаружения устройства 230 обнаружения объектов. Например, процессор 111 выполняет процесс обнаружения белой линии на изображении, снятом камерой 231. Когда процессор 111 обнаруживает белые линии, предусмотренные с обеих сторон полосы движения, процессор 111 формирует управляющую команду для изменения расстояний от рассматриваемого транспортного средства до белых линий. В частности, процессор 111 формирует управляющую команду для движения рассматриваемого транспортного средства в состоянии сохранения заданного расстояния относительно белой линии справа. Заданное расстояние предпочтительно является расстоянием, которое позволяет рассматриваемому транспортному средству двигаться вблизи белой линии с правой стороны. Управляющая команда включает в себя команду для управления устройством 270 рулевого управления или устройством 261 торможения. Процессор 111 отправляет сформированную управляющую команду в контроллер 210 транспортного средства через устройство 30 связи. Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства в соответствии с процессом помощи при вождении таким образом, что рассматриваемое транспортное средство движется в состоянии сохранения заданного расстояния относительно белой линии с правой стороны. Способ движения по правой стороне полосы движения не ограничен вышеописанным способом. Например, когда в полосе движения предусмотрена осевая линия, процессор 111 также может формировать управляющую команду для движения в состоянии сохранения заданного расстояния от осевой линии с правой стороны.
[0076]
Далее со ссылкой на фиг. 5 будет описан процесс определения обгона.
Фиг. 5 является схемой для описания другого примера процесса помощи при вождении в настоящем варианте осуществления. Фиг. 5 иллюстрирует ситуацию, в которой с ситуации, показанной на фиг. 4, прошло определенное время . Автобус B1 замедляется при включённом левом указателе I2 поворота и собирается остановиться на автобусной остановке S1. Рассматриваемое транспортное средство V3 замедляется посредством описанного выше процесса замедления. В то же время, рассматриваемое транспортное средство V3 находится в состоянии возможности движения по маршруту, отличному от маршрута движения (маршрут P1), по которому двигался автобус B1, за счёт вышеописанного процесса отмены следования маршруту движения. Кроме того, рассматриваемое транспортное средство V3 движется рядом с белой линией WL1 с правой стороны в состоянии сохранения заданного расстояния W3 относительно белой линии WL1 с правой стороны посредством вышеописанного процесса подготовки к обгону.
[0077]
Процессор 111 определяет, возможен ли обгон движущегося впереди транспортного средства, на основании результата обнаружения устройства 230 обнаружения объектов. Например, процессор 111 вычисляет расстояние от движущегося впереди транспортного средства до белой линии с правой стороны, используя изображение, снятое камерой 231, установленной в передней части рассматриваемого транспортного средства. Если вычисленное расстояние превышает ширину транспортного средства для рассматриваемого транспортного средства, которая заранее сохранена в запоминающем устройстве, таком как ПЗУ, процессор 111 определяет, что рассматриваемое транспортное средство может обогнать движущееся впереди транспортное средство. С другой стороны, если вычисленное расстояние не превышает ширину транспортного средства для рассматриваемого транспортного средства, процессор 111 определяет, что рассматриваемое транспортное средство не может обогнать движущееся впереди транспортное средство. В примере по фиг. 5 процессор 111 сравнивает расстояние W1 от автобуса B1 до белой линии WL1 с правой стороны с шириной W2 транспортного средства для рассматриваемого транспортного средства V3. В примере по фиг. 5, если расстояние W1 превышает ширину W2 транспортного средства для рассматриваемого транспортного средства V3, процессор 111 определяет, что рассматриваемое транспортное средство V3 может пройти через пространство между автобусом B1 и белой линией WL1 с правой стороны, чтобы обогнать автобус B1.
[0078]
Процессор 111 может учитывать скорость транспортного средства или ускорение/замедление движущегося впереди транспортного средства для определения, возможен ли обгон движущегося впереди транспортного средства. Например, если расстояние от движущегося впереди транспортного средства до белой линии с правой стороны больше ширины транспортного средства для рассматриваемого транспортного средства, процессор 111 может получать скорость или ускорение движущегося впереди транспортного средства от устройства 230 обнаружения объектов. Затем, если скорость транспортного средства для движущегося впереди транспортного средства не превышает заданную скорость, процессор 111 может определить, что возможен обгон движущегося впереди транспортного средства. В этом случае рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство посредством процесса обгона, который будет описан ниже, в состоянии, в котором движущееся впереди транспортное средство замедлилось и, следовательно, можно предотвратить неприятные ощущения, возникающие у пользователей рассматриваемого транспортного средства в отношении движения рассматриваемого транспортного средства.
[0079]
Наконец, со ссылкой на фиг. 6 будет описан процесс обгона.
Фиг. 6 является схемой для описания другого примера процесса помощи при вождении в настоящем варианте осуществления. Фиг. 6 иллюстрирует ситуацию, в которой прошло определенное время с ситуации, показанной на фиг. 5. Автобус B1 останавливается на остановке S1 при освещённом указателе I2 поворота с левой стороны. Процессор 111 определяет, что возможен обгон автобуса B1, посредством вышеописанного процесса определения обгона. Фиг. 6 иллюстрирует ситуацию, в которой рассматриваемое транспортное средство V3 обгоняет автобус B1.
[0080]
При определении того, что возможен обгон движущегося впереди транспортного средства, посредством процесса определения обгона процессор 111 формирует управляющую команду для обгона движущегося впереди транспортного средства. Управляющая команда включает в себя команду для управления устройством 270 рулевого управления, тормозным устройством 261 или устройством 260 привода.
[0081]
В частности, процессор 111 устанавливает маршрут движения для обгона движущегося впереди транспортного средства на основании обнаруженной белой линии. Например, процессор 111 устанавливает маршрут движения для движения в состоянии сохранения заданного расстояния от белой линии с правой стороны в качестве маршрута движения, используемого при прохождении движущегося впереди транспортного средства. Заданное расстояние предпочтительно составляет половину расстояния от движущегося впереди транспортного средства до белой линии с правой стороны. Заданное расстояние конкретно не ограничено, и процессор 111 может соответствующим образом установить заданное расстояние на основании дорожной ситуации и/или состояния движения движущегося впереди транспортного средства (такого как направление движения, скорость транспортного средства или ускорение/замедление).
[0082]
Затем процессор 111 устанавливает маршрут движения, используемый после прохождения движущегося впереди транспортного средства. Например, процессор 111 устанавливает маршрут движения для движения в состоянии удержания середины полосы движения в качестве маршрута движения, используемого после прохождения движущегося впереди транспортного средства. Процессор 111 не только устанавливает маршрут движения, но также устанавливает скорость транспортного средства и/или ускорение/замедление рассматриваемого транспортного средства. Например, процессор 111 устанавливает скорость транспортного средства или ускорение/замедление рассматриваемого транспортного средства таким образом, чтобы оно замедлялось при прохождении движущегося впереди транспортного средства и ускорялось после прохождения движущегося впереди транспортного средства.
[0083]
Затем процессор 111 отправляет управляющую команду, которая включает в себя маршрут движения и скорость транспортного средства и т.п. для рассматриваемого транспортного средства, в контроллер 210 транспортного средства через устройство 30 связи. Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство в соответствии с процессом помощи при вождении.
[0084]
В примере по фиг. 6 маршрут P2 движения является маршрутом движения, установленным процессором 111. Рассматриваемое транспортное средство V3 движется, чтобы пройти через пространство между автобусом B1 и белой линией WL1 с правой стороны вдоль маршрута P2 движения посредством процесса обгона для обгона движущегося впереди транспортного средства. При обгоне автобуса B1 рассматриваемое транспортное средство V3 движется в состоянии сохранения расстояния W4 от боковой линии WL1 с правой стороны. Расстояние W4 составляет половину расстояния W1 от автобуса B1 до белой линии WL1 с правой стороны.
[0085]
Процесс обгона для обгона движущегося впереди транспортного средства не ограничен вышеописанным процессом. Например, процессор 111 может рассматривать движущееся впереди транспортное средство как препятствие, когда движущееся впереди транспортное средство останавливается. В этом случае процессор 111 формирует управляющую команду для обгона при движении по границе полосы движения в соответствии с ситуацией вокруг рассматриваемого транспортного средства. Информация о линии границы полосы движения включена в дорожную информацию 223 навигационного устройства 220 рассматриваемого транспортного средства, и поэтому процессор 111 получает информацию о линии границы полосы движения из дорожной информации 223. Ситуация вокруг рассматриваемого транспортного средства включает в себя не только дорожную ситуацию на полосе движения, по которой движется рассматриваемое транспортное средство, но также и дорожную ситуацию на противоположной полосе движения. Примеры линии границы полосы движения включают в себя сплошную белую линию и прерывистую белую линию.
[0086]
Например, для распознавания ситуации вокруг рассматриваемого транспортного средства процессор 111 получает результат обнаружения устройства 230 обнаружения объектов. Используя полученный результат обнаружения, процессор 111 определяет, присутствует ли следующее транспортное средство и/или присутствует ли встречное транспортное средство. Затем, когда, исходя из ситуации вокруг рассматриваемого транспортного средства и информации о границе полосы движения, процессор 111 определяет подходящую ситуацию, в которой на основании правил дорожного движения не является проблематичным пересечение границы полосы движения, процессор 111 формирует управляющую команду для обгона движущегося впереди транспортного средства с пересечением границы полосы движения. Процессор 111 отправляет сформированную управляющую команду в контроллер 210 транспортного средства через устройство 30 связи. Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство с пересечением границы полосы движения в соответствии с процессом помощи при вождении.
[0087]
Фиг. 7А и 7В – блок–схемы, иллюстрирующие процедуру управления, выполняемую системой помощи при вождении по настоящему варианту осуществления. Процесс управления для помощи при вождении по настоящему варианту осуществления будет описан со ссылкой на блок–схемы по фиг. 7А и 7В. Процесс управления для помощи при вождении, описанный ниже, выполняется многократно с заданными временными интервалами.
Этап S201 является этапом, соответствующим этапу S101 в вышеописанном варианте осуществления, поэтому описание для вышеописанного варианта осуществления будет учтено здесь. То есть, если определено, что перед рассматриваемым транспортным средством присутствует движущееся впереди транспортное средство, процесс переходит к этапу S202, тогда как, если определено, что перед рассматриваемым транспортным средством не присутствует движущееся впереди транспортное средство, процесс управления для помощи в вождении завершается.
[0088]
На этапе S202 процессор 111 формирует управляющую команду для следования по маршруту движения движущегося впереди транспортного средства. Процессор 111 получает относительное положение движущегося впереди транспортного средства в направлении ширины транспортного средства из результата обнаружения радарного устройства 232 рассматриваемого транспортного средства. Процессор 111 формирует управляющую команду для следования за движущимся впереди транспортным средством таким образом, что сохраняется постоянное относительное положение движущегося впереди транспортного средства в направлении ширины транспортного средства, и отправляет сформированную управляющую команду на контроллер 210 транспортного средства.
[0089]
На этапе S203 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S202. Это позволяет рассматриваемому транспортному средству следовать маршруту движения движущегося впереди транспортного средства.
[0090]
Этапы S204 и S205 являются этапами, соответствующими, соответственно, этапам S102 и S103 в вышеописанном варианте осуществления, поэтому описание для вышеописанного варианта осуществления будет учтено здесь. Таким образом, на этапе S204 процессор 111 формирует управляющую команду для сохранения расстояния между транспортными средствами до движущегося впереди транспортного средства постоянным и отправляет сформированную управляющую команду в контроллер 210 транспортного средства. На этапе S205 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S204. Рассматриваемое транспортное средство следует за движущимся впереди транспортным средством, сохраняя постоянное расстояние между транспортными средствами.
[0091]
На этапе S206 процессор 111 определяет, является ли движущееся впереди транспортное средство автобусом. Процессор 111 получает изображение, захваченное впереди рассматриваемого транспортного средства, от устройства 230 обнаружения объектов рассматриваемого транспортного средства. Затем процессор 111 выполняет обработку изображения для определения, является ли движущееся впереди транспортное средство автобусом. Если определено, что движущееся впереди транспортное средство является автобусом, процесс переходит к этапу S207, в то время как, если определено, что движущееся впереди транспортное средство не является автобусом, процесс управления для помощи в вождении завершается.
[0092]
На этапе S207 процессор 111 определяет, движется ли движущееся впереди транспортное средство в области, включающей в себя автобусную остановку и окрестности автобусной остановки. Например, процессор 111 указывает в картографической информации 222 автобусную остановку, расположенную ближе всего к текущему положению движения движущегося впереди транспортного средства. Затем процессор 111 вычисляет расстояние от текущего положения движения движущегося впереди транспортного средства до указанной автобусной остановки. Если вычисленное расстояние не превышает заданную пороговую величину, процессор 111 определяет, что движущееся впереди транспортное средство движется в области, включающей в себя автобусную остановку и окрестности автобусной остановки. С другой стороны, если вычисленное расстояние превышает заданную пороговую величину, процессор 111 определяет, что движущееся впереди транспортное средство движется за пределами области, включающей в себя автобусную остановку и окрестности автобусной остановки. Если движущееся впереди транспортное средство движется в области, включающей в себя автобусную остановку и окрестности автобусной остановки, процесс переходит к этапу S208. С другой стороны, если движущееся впереди транспортное средство движется за пределами области, включающей в себя автобусную остановку и окрестности автобусной остановки, или если движущееся впереди транспортное средство движется в области, включающей в себя перекресток и окрестности перекрестка, процесс управления для помощи при вождении завершается.
[0093]
Этап S208 является этапом, соответствующим этапу S105 в вышеописанном варианте осуществления, поэтому описание для вышеописанного варианта осуществления будет учтено здесь. То есть, если определено, что освещён указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, процесс переходит к этапу S209. С другой стороны, если определено, что указатель поворота со стороны обочины дороги не освещён, процесс управления для помощи при вождении завершается.
[0094]
Этапы S209 и S210 являются этапами, соответствующими, соответственно, этапам S106 и S107 в вышеописанном варианте осуществления, поэтому описание для вышеописанного варианта осуществления будет учтено здесь. Таким образом, на этапе S209 процессор 111 формирует управляющую команду для замедления и отправляет сформированную управляющую команду в контроллер 210 транспортного средства. На этапе S210 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S209. Расстояние между транспортными средствами до движущегося впереди транспортного средства увеличивается, поскольку рассматриваемое транспортное средство замедляется.
[0095]
На этапе S211 процессор 111 формирует управляющую команду для отмены следования маршруту движения движущегося впереди транспортного средства. Процессор 111 формирует управляющую команду для прекращения следования маршруту движения движущегося впереди транспортного средства и отправляет сформированную управляющую команду в контроллер 210 транспортного средства.
[0096]
На этапе S212 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S211. Это позволяет рассматриваемому транспортному средству следовать по маршруту, отличному от маршрута движущегося впереди транспортного средства.
[0097]
На этапе S213 процессор 111 формирует управляющую команду для движения вблизи белой линии с правой стороны относительно направления движения рассматриваемого транспортного средства. Процессор 111 обнаруживает белые линии, предусмотренные с обеих сторон полосы движения, из изображения, снятого впереди рассматриваемого транспортного средства. Процессор 111 формирует управляющую команду для рассматриваемого транспортного средства в состоянии сохранения заданного расстояния относительно белой линии с правой стороны и отправляет сформированную управляющую команду в контроллер 210 транспортного средства.
[0098]
На этапе S214 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S213. Рассматриваемое транспортное средство движется вблизи правой стороны полосы движения, сохраняя заданное расстояние до белой линии с правой стороны.
[0099]
На этапе S215 процессор 111 определяет, возможен ли обгон движущегося впереди транспортного средства. Например, процессор 111 вычисляет расстояние от движущегося впереди транспортного средства до белой линии с правой стороны с использованием изображения, снятого перед рассматриваемым транспортным средством, и определяет, превышает ли вычисленное расстояние ширину транспортного средства для рассматриваемого транспортного средства. Если вычисленное расстояние превышает ширину транспортного средства для рассматриваемого транспортного средства, процессор 111 определяет, что возможен обгон движущегося впереди транспортного средства. С другой стороны, если вычисленное расстояние не превышает ширину транспортного средства для рассматриваемого транспортного средства, процессор 111 определяет, что обгон движущегося впереди транспортного средства невозможен. Если обгон движущегося впереди транспортного средства возможен, процесс переходит к этапу S216, в то время как если обгон движущегося впереди транспортного средства невозможен, процесс управления для помощи при вождении завершается.
[0100]
На этапе S216 процессор 111 формирует управляющую команду для обгона движущегося впереди транспортного средства. Например, процессор 111 устанавливает маршрут движения для движения в середине пространства между движущимся впереди транспортным средством и белой линией с правой стороны в качестве маршрута движения, используемого при прохождении движущегося впереди транспортного средства. Процессор 111 также устанавливает маршрут движения для движения по середине полосы движения в качестве маршрута движения, используемого после прохождения движущегося впереди транспортного средства. Процессор 111 не только устанавливает маршрут движения, но также устанавливает соответствующую скорость транспортного средства или ускорение/замедление для обгона. Процессор 111 отправляет управляющую команду, которая включает в себя маршрут движения и скорость транспортного средства и т.п. для рассматриваемого транспортного средства, в контроллер 210 транспортного средства.
[0101]
На этапе S217 контроллер 210 транспортного средства выполняет управляющую команду, сформированную на этапе S216. Рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство, которое останавливается на автобусной остановке или замедляется возле автобусной остановки.
[0102]
Как описано выше, в настоящем варианте осуществления помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством, является помощью при вождении для управления рулевым управлением рассматриваемого транспортного средства. Это позволяет выполнить соответствующую помощь при вождении в соответствии с ситуацией с движущимся впереди транспортным средством.
[0103]
В настоящем варианте осуществления помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством, является помощью при вождении для движения в состоянии сохранения заданного расстояния относительно белой линии с правой стороны. Это позволяет занять надлежащее положение для обгона перед обгоном движущегося впереди транспортного средства, и соответствующая помощь при вождении может быть выполнена в соответствии с окружающей ситуацией.
[0104]
В настоящем варианте осуществления помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством, является помощью при вождении для обгона движущегося впереди транспортного средства, когда скорость транспортного средства для движущегося впереди транспортного средства не превышает заданную скорость транспортного средства. Это может препятствовать тому, чтобы рассматриваемое транспортное средство оставалось позади движущегося впереди транспортного средства, и может быть выполнена помощь при вождении, не вызывая неприятные ощущения у пользователей.
[0105]
В настоящем варианте осуществления помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством, представляет собой помощь при вождении для обгона движущегося впереди транспортного средства при пересечении линии границы полосы движения с правой стороны. Это позволяет выполнить помощь при вождении для надлежащего обгона движущегося впереди транспортного средства в соответствии с окружающей ситуацией, шириной полосы движения и шириной транспортного средства для движущегося впереди транспортного средства.
[0106]
В настоящем варианте осуществления, когда рассматриваемое транспортное средство следует маршруту движения движущегося впереди транспортного средства, помощь при вождении, отличная от помощи при вождении для следования за движущимся впереди транспортным средством является помощью при вождении для неследования маршруту движения движущегося впереди транспортного средства. Это может препятствовать тому, чтобы рассматриваемое транспортное средство остановилось на обочине дороги, следуя за движущимся впереди транспортным средством, и могут быть смягчены неприятные ощущения, вызываемые у пользователей.
[0107]
В настоящем варианте осуществления процессор 111 определяет, является ли движущееся впереди транспортное средство автобусом, и если движущееся впереди транспортное средство является автобусом, процессор 111 определяет, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрёстка, исходя из расстояния от движущегося впереди транспортного средства до автобусной остановки. Это позволяет точно определить, освещён ли указатель поворота с целью поворота вправо или влево на перекрестке или с целью остановки на обочине дороги.
[0108]
Варианты осуществления, пояснённые выше, описаны для облегчения понимания настоящего изобретения, но не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеприведённых вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, находящиеся в рамках технического объема настоящего изобретения.
[0109]
Например, в вышеописанном втором варианте осуществления в качестве примера приведена конфигурация, в которой процесс обгона, выполняемый процессором 111, включает в себя задание маршрута движения из взаимного расположения между движущимся впереди транспортным средством и белой линией с правой стороны, но настоящее изобретение не ограничено этим. Например, когда имеется следующее транспортное средство, которое движется, следуя за рассматриваемым транспортным средством, процессор 111 может использовать маршрут движения следующего транспортного средства. Когда следующее транспортное средство обогнало движущееся впереди транспортное средство прежде чем рассматриваемое транспортное средство обгонит движущееся впереди транспортное средство, процессор 111 может установить маршрут движения, по которому следующее транспортное средство обогнало движущееся впереди транспортное средство, в качестве маршрута движения для обгона. В этом случае рассматриваемое транспортное средство следует по маршруту движения следующего транспортного средства, чтобы обогнать движущееся впереди транспортное средство в соответствии с процессом помощи при вождении, выполняемым процессором 111. Это позволяет выполнять помощь при вождении с облегчением неприятных ощущений, вызываемых у пользователей.
[0110]
В вышеописанных двух вариантах осуществления в качестве примера использованы случаи, в которых рассматриваемое транспортное средство движется по дороге с одной полосой движения в каждом направлении, но настоящее изобретение не ограничено этим. Например, процессор 11 или 111 может выполнять различные описанные выше процессы помощи при вождении в ситуации с двумя полосами движения в каждом направлении, в ситуации с двусторонним движением (дорога без разделительной полосы в середине) и на других дорогах.
[0111]
В настоящем описании устройство помощи при вождении в соответствии с настоящим изобретением описано в отношении примерного устройства 100 или 110 помощи при вождении, содержащего устройство 10 управления, устройство 20 вывода и устройство 30 связи, но настоящее изобретение не ограничено этим.
[0112]
В настоящем описании устройство связи согласно настоящему изобретению описано в отношении примерного устройства 30 связи, но настоящее изобретение не ограничено этим.
Описание ссылочных позиций
[0113]
1 Система помощи при вождении
100 Устройство помощи при вождении
10 Устройство управления
11 Процессор
20 Устройство вывода
30 Устройство связи
200 Бортовое устройство
210 Контроллер транспортного средства
220 Навигационное устройство
221 Устройство обнаружения положения
222 Картографическая информация
223 Дорожная информация
230 Устройство обнаружения объектов
231 Камера
232 Радарное устройство
240 Устройство вывода
241 Дисплей
242 Громкоговоритель
250 Устройство обнаружения
251 Датчик угла поворота рулевого колеса
252 Датчик скорости автомобиля
253 Датчик ориентации
260 Устройство привода
261 Тормозное устройство
270 Устройство рулевого управления

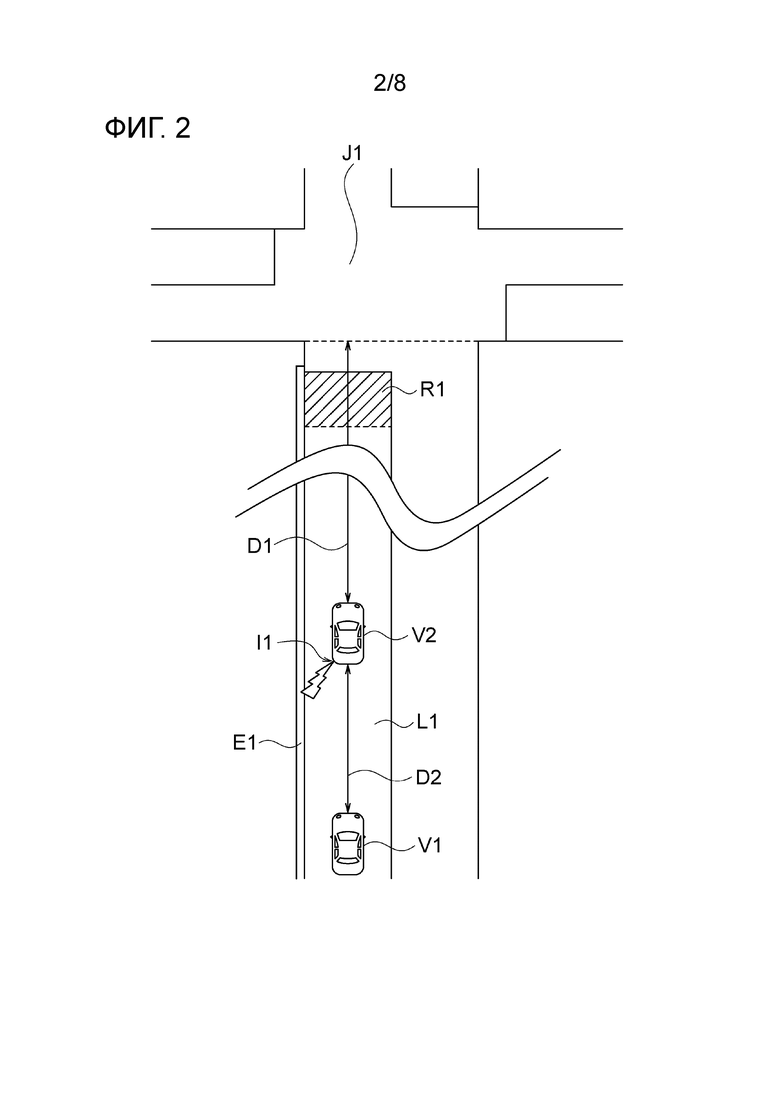
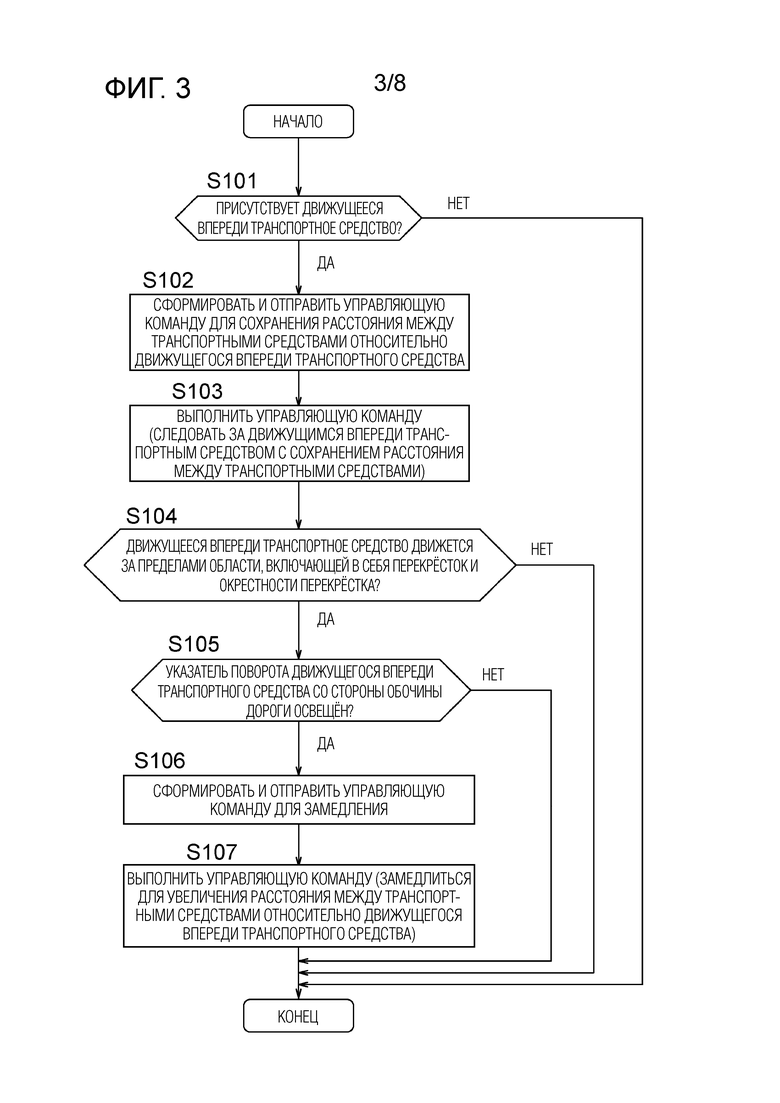


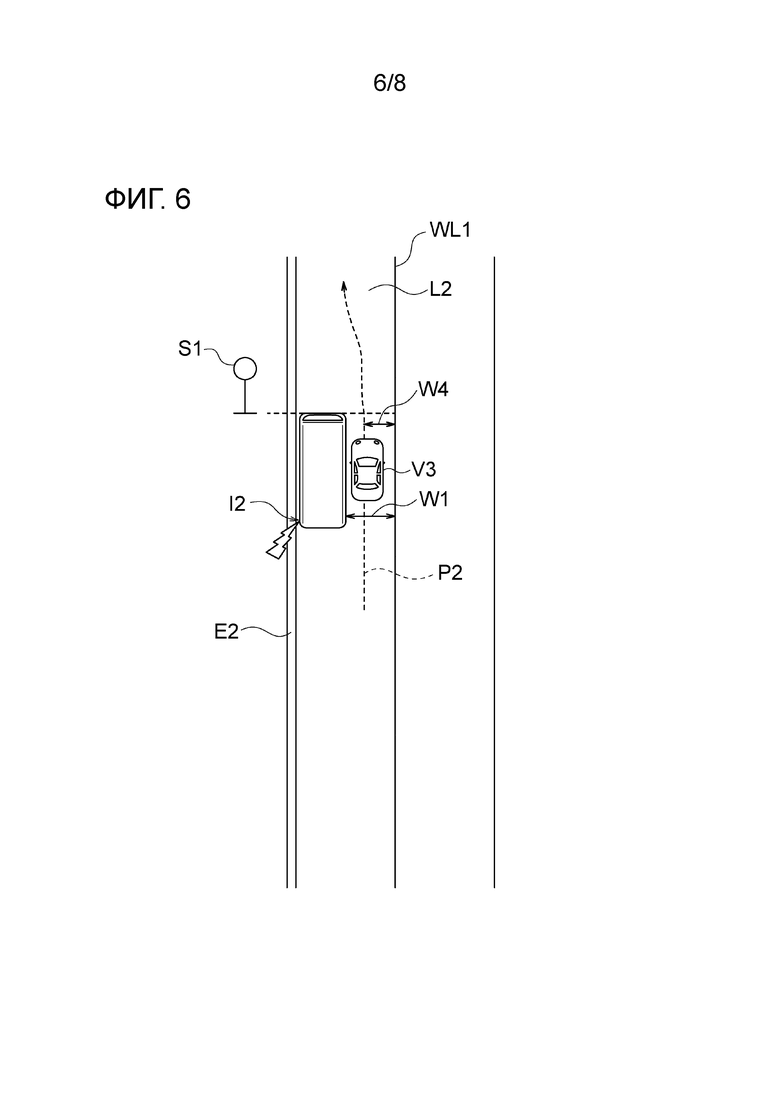


Изобретение относится к устройству и способу помощи при вождении. Устройство помощи при вождении содержит процессор, который позволяет выполнять процесс помощи при вождении для рассматриваемого транспортного средства на основании результата обнаружения от датчика. Причем процессор выполнен с возможностью, когда датчиком распознано движущееся впереди транспортное средство, выполнения первого процесса помощи при вождении для сохранения постоянного расстояния между транспортными средствами относительно движущегося впереди транспортного средства и определения, движется ли движущееся впереди транспортное средство за пределами области, если движущееся впереди транспортное средство движется за пределами упомянутой области, определения, освещен ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги, и если указатель поворота движущегося впереди транспортного средства освещен, формирования управляющей команды для прекращения первого процесса помощи при вождении и выполнения второго процесса помощи при вождении, отличного от первого процесса помощи при вождении. Способ помощи при вождении, выполненный с использованием процессора, используемого в процессе помощи при вождении для рассматриваемого транспортного средства. Достигается повышение безопасности водителя транспортного средства. 2 н. и 9 з.п. ф-лы, 8 ил.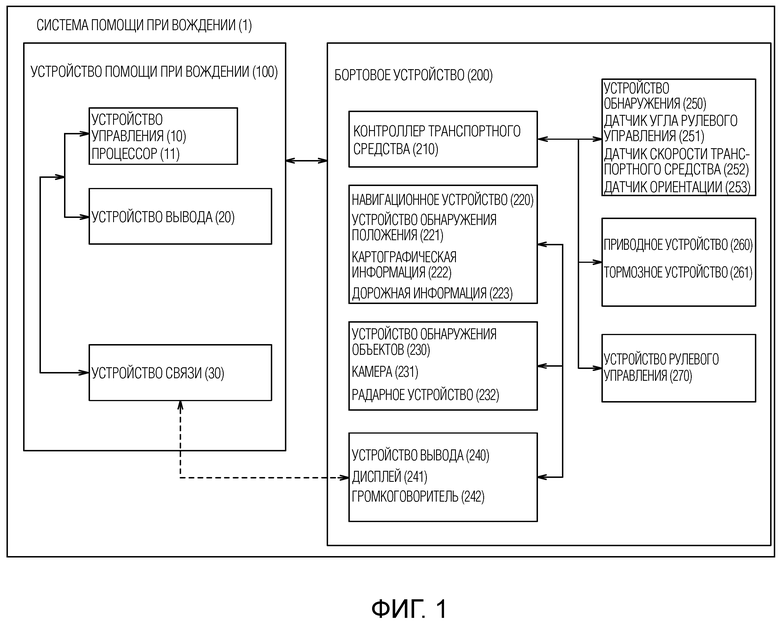
1. Устройство помощи при вождении, содержащее процессор, который позволяет выполнять процесс помощи при вождении для рассматриваемого транспортного средства на основании результата обнаружения от датчика, который обнаруживает ситуацию вокруг рассматриваемого транспортного средства,
причем процессор выполнен с возможностью: когда датчиком распознано движущееся впереди транспортное средство,
выполнения первого процесса помощи при вождении для сохранения постоянного расстояния между транспортными средствами относительно движущегося впереди транспортного средства; и
определения, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрестка;
если движущееся впереди транспортное средство движется за пределами упомянутой области, определения, освещен ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги; и
если указатель поворота движущегося впереди транспортного средства освещен, формирования управляющей команды для прекращения первого процесса помощи при вождении и выполнения второго процесса помощи при вождении, отличного от первого процесса помощи при вождении, причем первый процесс помощи при вождении выполняется для следования за движущимся впереди транспортным средством,
причем второй процесс помощи при вождении представляет собой процесс помощи при вождении для увеличения расстояния между транспортными средствами относительно движущегося впереди транспортного средства.
2. Устройство помощи при вождении по п. 1, в котором второй процесс помощи при вождении представляет собой процесс помощи при вождении для замедления рассматриваемого транспортного средства, чтобы таким образом увеличить расстояние между транспортными средствами относительно движущегося впереди транспортного средства.
3. Устройство помощи при вождении по п. 1 или 2, в котором второй процесс помощи при вождении включает в себя процесс помощи при вождении для движения в состоянии сохранения заданного расстояния по отношению к линии границы полосы движения или осевой линии со стороны, противоположной стороне обочины дороги, в полосе движения рассматриваемого транспортного средства, в которой движется рассматриваемое транспортное средство.
4. Устройство помощи при вождении по п. 1, в котором второй процесс помощи при вождении представляет собой процесс помощи при вождении для управления скоростью транспортного средства для рассматриваемого транспортного средства.
5. Устройство помощи при вождении по п. 1, в котором второй процесс помощи при вождении представляет собой процесс помощи при вождении для движения рассматриваемого транспортного средства с сохранением заданного расстояния по отношению к противоположной стороне относительно стороны обочины дороги.
6. Устройство помощи при вождении по п. 1, в котором второй процесс помощи при вождении представляет собой процесс помощи при вождении для обгона движущегося впереди транспортного средства, если скорость транспортного средства для движущегося впереди транспортного средства не превышает заданную скорость транспортного средства.
7. Устройство помощи при вождении по п. 6, в котором второй процесс помощи при вождении представляет собой процесс помощи при вождении для обгона движущегося впереди транспортного средства с пересечением линии границы определенной полосы движения.
8. Устройство помощи при вождении по п. 1, в котором второй процесс помощи при вождении представляет собой процесс помощи при вождении для увеличения расстояния между транспортными средствами между рассматриваемым транспортным средством и движущимся впереди транспортным средством, когда рассматриваемое транспортное средство сохраняет расстояние между транспортными средствами посредством первого процесса помощи при вождении.
9. Устройство помощи при вождении по п. 1, в котором процессор дополнительно выполнен с возможностью:
определения, является ли движущееся впереди транспортное средство автобусом; и
если движущееся впереди транспортное средство является автобусом, определения, движется ли автобус за пределами упомянутой области, на основании расстояния между автобусом и автобусной остановкой.
10. Устройство помощи при вождении по п. 6 или 7, в котором
процессор дополнительно выполнен с возможностью определения, имеется ли другое транспортное средство, обгоняющее движущееся впереди транспортное средство, и
второй процесс помощи при вождении представляет собой процесс помощи при вождении для следования маршруту движения, по которому другое транспортное средство обогнало движущееся впереди транспортное средство, когда другое транспортное средство обогнало движущееся впереди транспортное средство.
11. Способ помощи при вождении, выполняемый с использованием процессора, используемого в процессе помощи при вождении для рассматриваемого транспортного средства, причем способ помощи при вождении содержит этапы, на которых:
если датчиком, который обнаруживает ситуацию вокруг рассматриваемого транспортного средства, распознано движущееся впереди транспортное средство,
выполняют первую помощь при вождении для сохранения постоянного расстояния между транспортными средствами относительно движущегося впереди транспортного средства; и
определяют, движется ли движущееся впереди транспортное средство за пределами области, включающей в себя перекресток и окрестности перекрестка;
если движущееся впереди транспортное средство движется за пределами упомянутой области, определяют, освещен ли указатель поворота движущегося впереди транспортного средства со стороны обочины дороги; и
если указатель поворота движущегося впереди транспортного средства освещен, прекращают первый процесс помощи при вождении и выполняют второй процесс помощи при вождении, отличный от первого процесса помощи при вождении, причем первый процесс помощи при вождении выполняется для следования за движущимся впереди транспортным средством,
причем второй процесс помощи при вождении представляет собой процесс помощи при вождении для увеличения расстояния между транспортными средствами относительно движущегося впереди транспортного средства.
| WO 2016027349 A1, 25.02.2016 | |||
| US 2015353087 A1, 10.12.2015 | |||
| JP 5024015 B2, 12.09.2012. |

