Область техники, к которой относится изобретение
Настоящее изобретение относится к периферийному контрольному устройству для имитации эндоскопических процедур и, в частности, к портативному периферийному контрольному устройству для эндоскопического тренажера.
Уровень техники
Настоящее изобретение относится к периферийному контрольному устройству для имитации эндоскопических процедур и, в частности, к портативному периферийному контрольному устройству для эндоскопического тренажера.
Периферийное устройство предназначено для ряда систем по изучению эндоскопических процедур, которые также могут быть определены как тренажеры.
Традиционная концепция обучения эндоскопии включает в себя прямое взаимодействие между учащимся, например, студентом-медиком, и преподавателем, т.е. обучающим врачом, во время эндоскопического обследования, проводимого на пациенте, проходящем лечение, т.е. обучение «один на один».
Этот способ обеспечивает более эффективное обучение учащегося эндоскопическим процедурам, но, тем не менее, имеет несколько недостатков, таких как, например, увеличение времени, необходимого для выполнения обследования, с возможными осложнениями, и неудобство для пациента, с последующим увеличением общих затрат, которые несет медицинское учреждение.
Для устранения вышеуказанных недостатков были разработаны эндоскопические тренажеры, которые позволяют учащимся проводить эндоскопические процедуры в контролируемой среде, без риска для пациентов, что позволяет учащимся проводить эндоскопические процедуры для приобретения требуемой чувствительности перед тем, как приступить к проведению процедур на пациентах.
В настоящее время известны, по существу, четыре типа эндоскопических тренажеров: механические тренажеры, тренажеры, использующие животных, живых или мертвых, компьютеризированные модели и составные тренажеры, т.е. механические тренажеры, содержащие компоненты животных, с наличием или без электронно-вычислительных машин.
В настоящее время на рынке присутствуют только эндоскопические тренажеры, проверенные путем клинических исследований.
Модели, в которых используются живые животные, фактически были отменены, поскольку они причиняли ненужные физические и психологические страдания животным, и они были заменены составными моделями, в которых используются механические части, изготовленные с использованием неживых органов.
Например, некоторые тренажеры имеют компонент, который точно повторяет человеческую грудную клетку, внутри которой расположены органы, полученные из живых животных. Эти составные модели могут использоваться для имитации большого спектра медицинских процедур, таких как гастроскопия, колоноскопия, гемостатические методы, эндоскопическая резекция слизистой и подслизистой оболочки, эндоскопическая ретроградная холангио-панкреатография, эхо-эндоскопия, двухбалонная энтероскопия, чрескожная гастростомия и т.д.
Несмотря на свою эффективность, составные модели очень дороги, имеют не очень большую гибкость, требуют постоянной замены органических частей и оставляют мало места для ошибок.
Чисто механические модели, т.е. не использующие органические части, взятые у живых животных, избавлены от некоторых из вышеуказанных недостатков составных эндоскопических моделей, но они не обеспечивают тот же уровень реализма, что другие модели.
Компьютеризированные модели, обеспечивающие особенно реалистичную имитацию, были введены впервые в 1980 годах.
С того времени, по мере развития электронных и информационных технологий, эти тренажеры претерпели обширное технологическое развитие.
Передовая технология позволяет этим тренажерам использовать графические эндоскопические изображения, отображаемые на экране в зависимости от задания учащегося или в зависимости от сложности выполняемой процедуры.
Обучающие процедуры могут включать в себя движение принадлежностей в режиме реального времени и возрастающую сложность с различными сценариями.
В предшествующем уровне техники известны компьютеризированные тренажеры, состоящие из интегрированной и автономной консоли, оснащенной экранами и операционной системой.
Эти тренажеры точно имитируют форму и конструкцию эндоскопа, а также физическую реакцию тела, в которое вводится эндоскоп, благодаря управлению с обратной связью. В некоторых известных тренажерах для их эксплуатации используются настоящие эндоскопы, применяемые в медицинских целях.
К недостаткам можно отнести то, что известные компьютеризированные эндоскопические тренажеры, будучи очень точными, являются очень сложными, громоздкими, неудобными в перемещении и дорогими, каковые признаки оказывают негативное влияние на их широкое распространение и возможность использования учащимися вне медицинских учреждений.
Кроме того, интеграция в тренажере блоков обработки и управляющего программного обеспечения затрудняет подключение к Интернету, установку обновлений и использование цифровых учебных платформ, доступных онлайн. Эти недостатки ограничивают реальные возможности доступа учащихся к эндоскопическим тренажерам, размещенным в медицинских учреждениях, что несовместимо с требованиями обучения, предоставляемого учащимся.
Также было установлено, что во время обучения учащихся-новичков, физическая достоверность известных тренажеров в отношении реальных эндоскопических устройств является слишком точной для учащихся-новичков.
Цель изобретения
В этом контексте один аспект настоящего изобретения заключается в создании портативного периферийного контрольного устройства для имитации эндоскопических процедур, выполненного с возможностью подключения к компьютеру и содержащего монтажный элемент и рычаг управления, прикрепленный к монтажному элементу, воспроизводящий рукоятку гибкого эндоскопа для медицинского применения; рычаг управления имеет группу исполнительных устройств, воспроизводящих соответствующие приводные механизмы, представленные на рукоятке гибкого эндоскопа для медицинского применения.
Периферийное контрольное устройство выполнено с возможностью преобразования по меньшей мере одного срабатывания рычага управления в электрический сигнал, означающий срабатывание.
Периферийное контрольное устройство выполнено с возможностью преобразования по меньшей мере одной активации приводного механизма в электрический сигнал, означающий активацию.
Периферийное контрольное устройство выполнено с возможностью преобразования движения устройства движения в электрический сигнал, означающий движение.
Периферийное контрольное устройство содержит, по меньшей мере, один выход для электрических сигналов.
В соответствии с одним аспектом изобретения, периферийное устройство содержит группу разъемов для обеспечения этих выходов.
Преимущество состоит в том, что периферийное контрольное устройство, сконструированное таким образом, позволяет учащимся выполнять упражнения с имитацией эндоскопических процедур в любых условиях, даже бытовых, по меньшей мере для приобретения базовых навыков, и оно легко переносится, так как обладает уменьшенными габаритами и весом.
В соответствии с одним аспектом изобретения, изобретение относится к тренажеру для эндоскопии, который содержит периферийное контрольное устройство, в соответствии с одним из указанных аспектов, и компьютер, подключенный к периферийному контрольному устройству.
Преимущество состоит в том, что периферийное контрольное устройство, в соответствии с изобретением, представляет собой недорогой тренажер по сравнению с известными тренажерами и, следовательно, является доступным для огромного числа пользователей.
Краткое описание чертежей
Дополнительные особенности и преимущества настоящего изобретения являются более очевидными в неограничивающем описании, которое следует из предпочтительного неограничивающего варианта осуществления периферийного контрольного устройства для имитации эндоскопических процедур, как показано на прилагаемых чертежах, на которых:
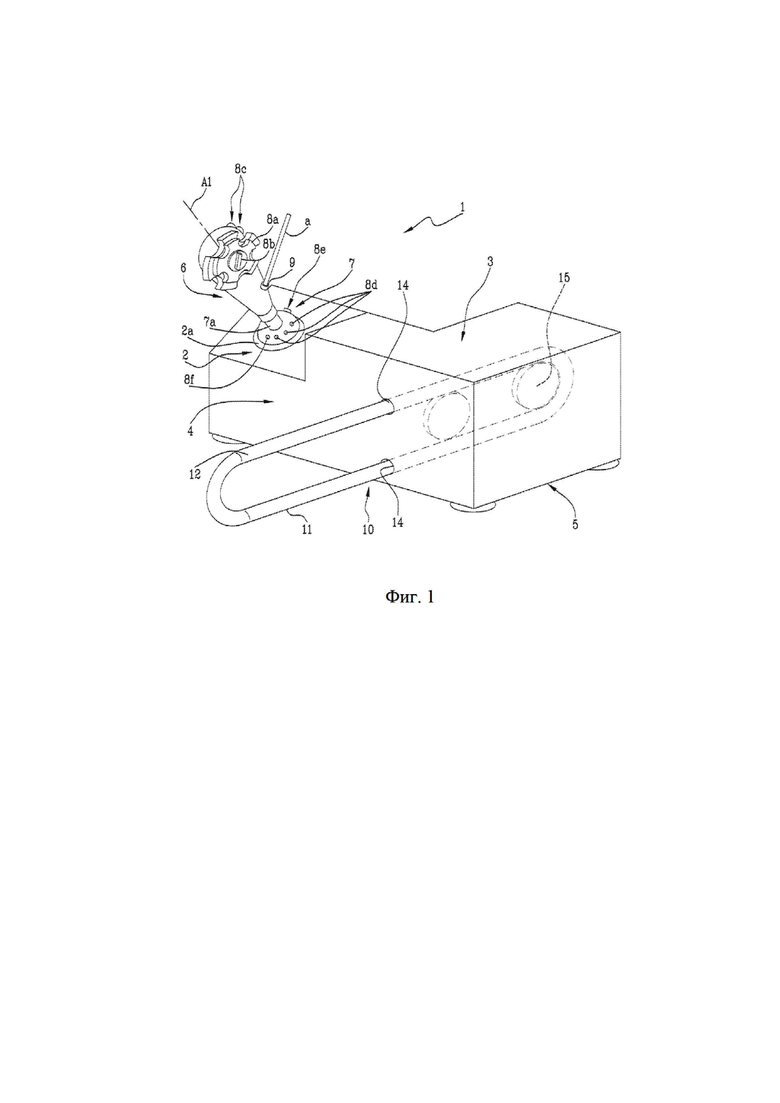
- фиг. 1 представляет собой схематический вид в перспективе периферийного контрольного устройства для имитации эндоскопических процедур, выполненного в соответствии с настоящим изобретением;
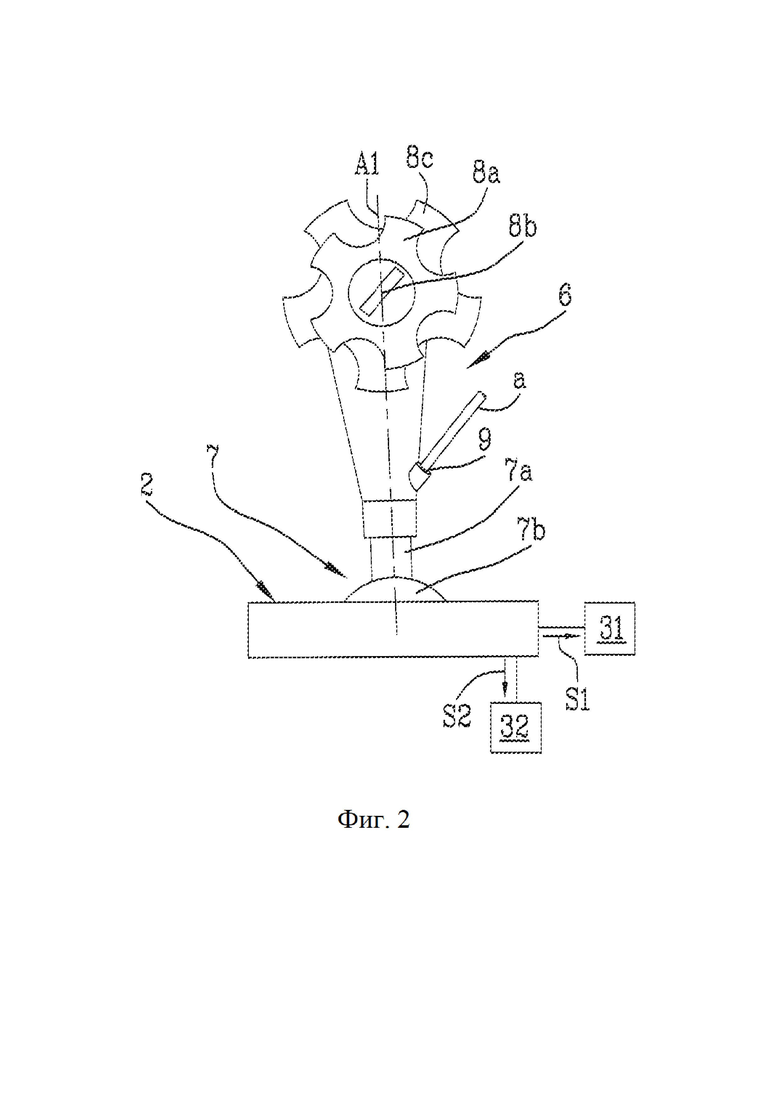
- фиг. 2 представляет собой дополнительный схематический вид в перспективе периферийного контрольного устройства, показанного на фиг. 1, на котором некоторые части удалены для лучшего представления других;
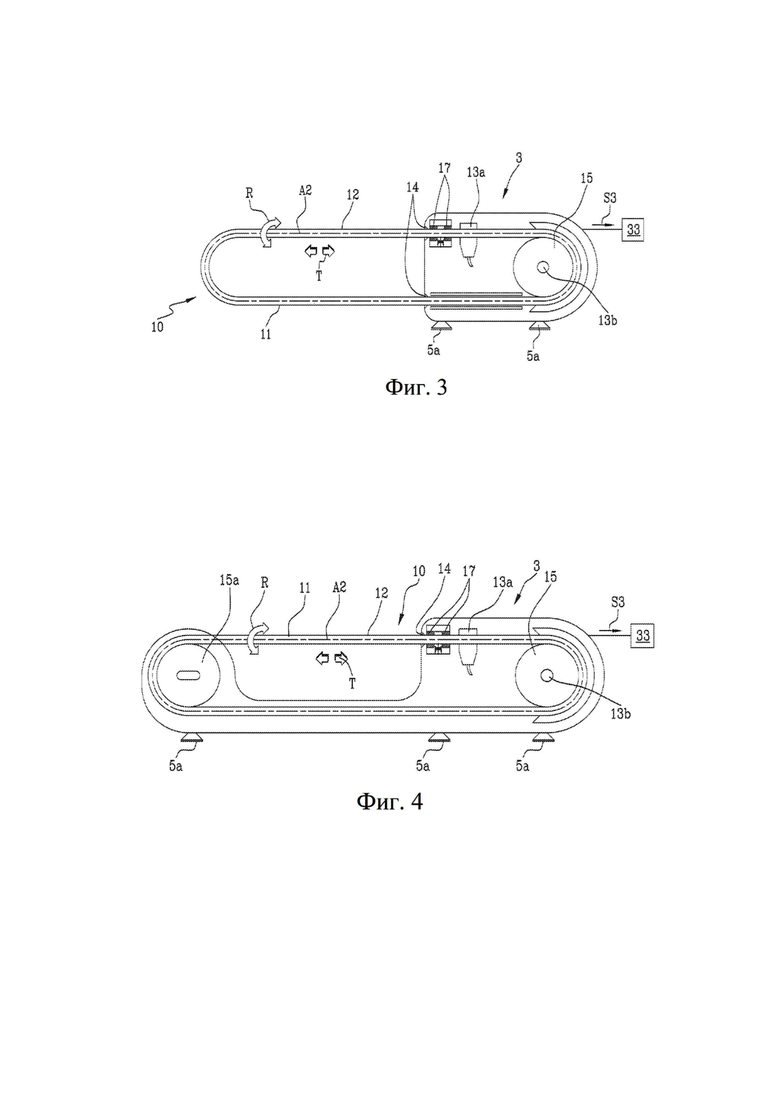
- фиг. 3 представляет собой схематический вид в поперечном разрезе фрагмента периферийного контрольного устройства, показанного на фиг. 1;
- на фиг. 4 показан второй вариант осуществления фрагмента, показанного на фиг. 3;
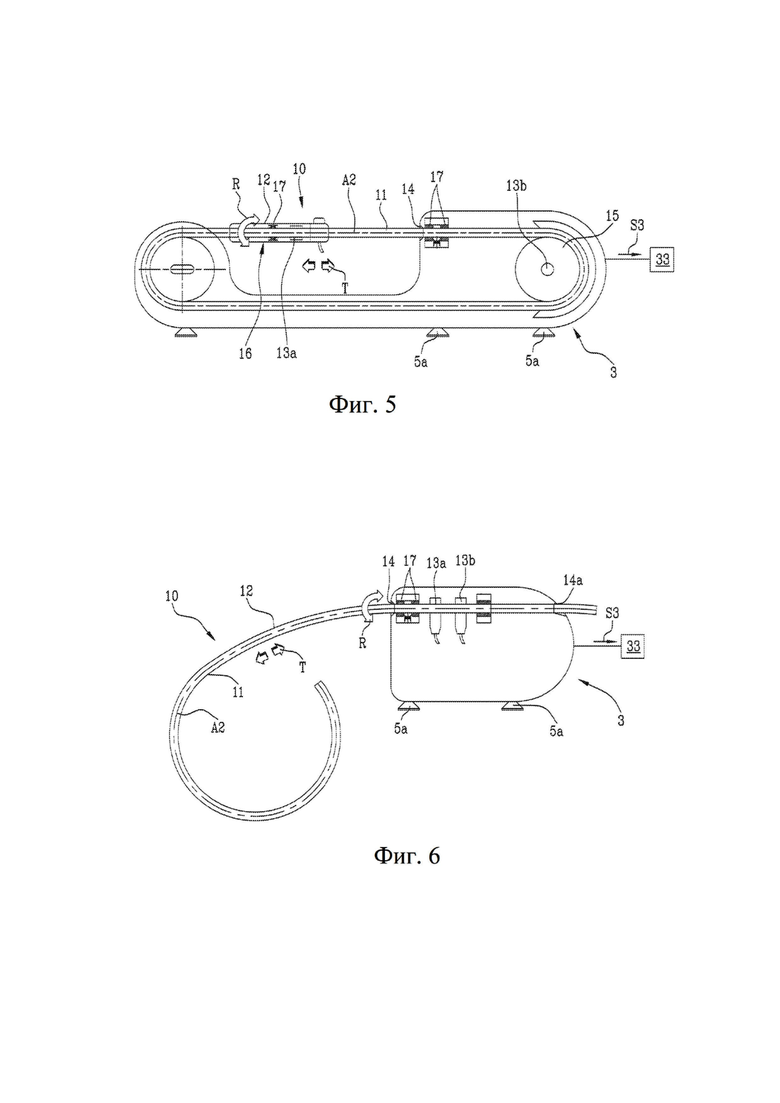
- на фиг. 5 показан вариант второго варианта осуществления фрагмента, показанного на фиг. 4;
- на фиг. 6 показан третий вариант осуществления фрагмента, показанного на фиг. 3;
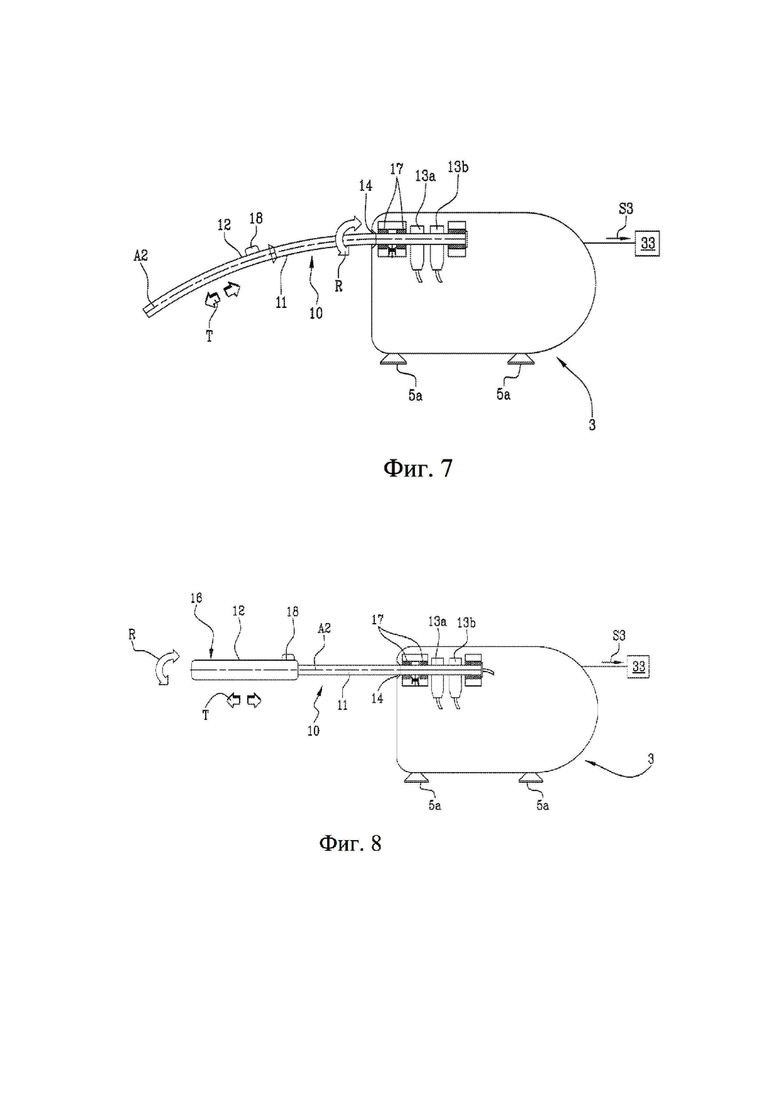
- на фиг. 7 показан вариант третьего варианта осуществления фрагмента, показанного на фиг. 6;
- на фиг. 8 показан четвертый вариант осуществления фрагмента, показанного на фиг. 3;
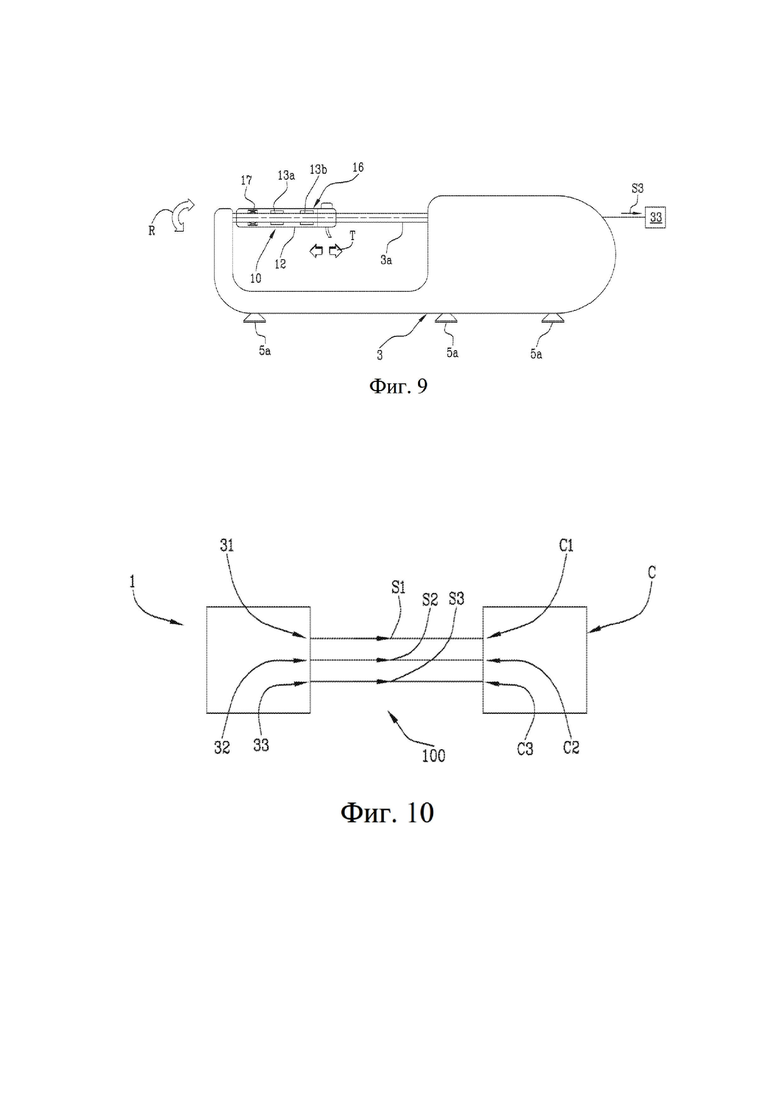
- на фиг. 9 показан вариант четвертого варианта осуществления фрагмента, показанного на фиг. 8;
- на фиг. 10 представлено схематическое изображение периферийного контрольного устройства в соответствии с настоящим изобретением;
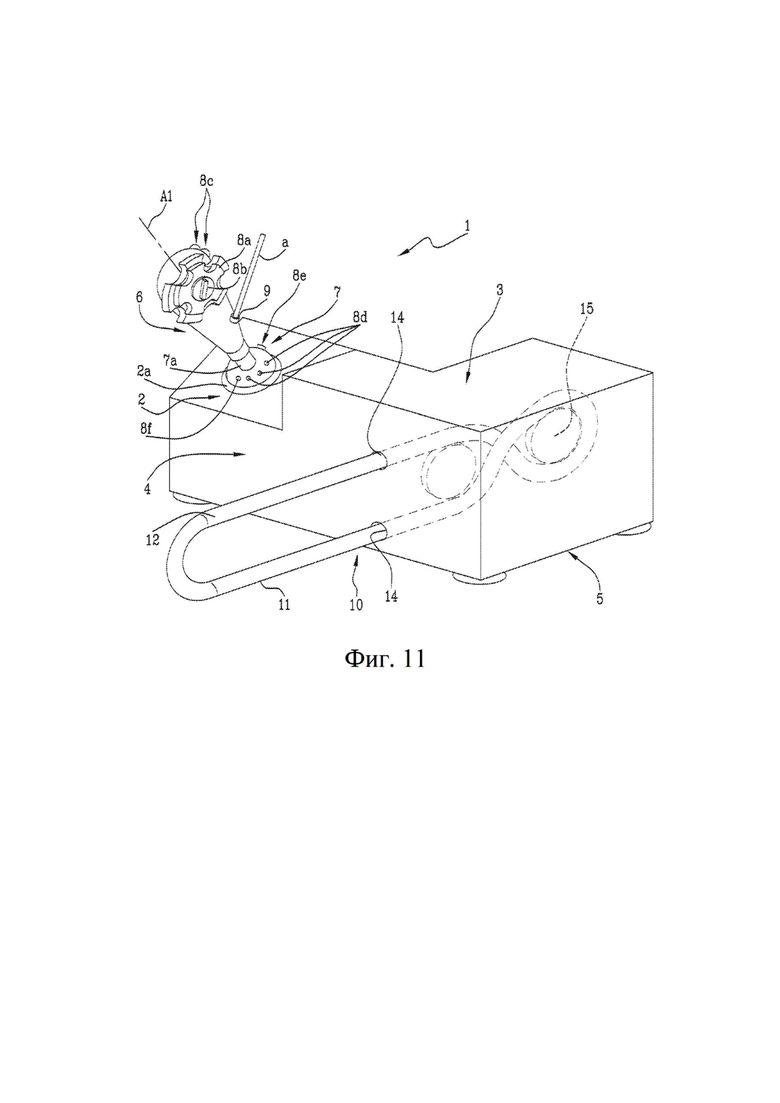
- на фиг. 11 представлен дополнительный вариант осуществления по фиг. 1.
Подробное описание предпочтительных вариантов осуществления изобретения
Со ссылкой на прилагаемые чертежи, цифра 1 обозначает в общем портативное периферийное контрольное устройство для имитации эндоскопических процедур.
Термин «портативное» означает, что периферийное устройство 1 может переноситься, легко перемещаться и транспортироваться из одного места в другое, или не требует стационарной установки и может быть использовано в любом месте, где, как описано более подробно ниже, оно может быть соединено с соответствующим образом запрограммированным или программируемым компьютером.
Периферийное контрольное устройство 1 выполнено с возможностью подключения к компьютеру «C».
В некоторых вариантах осуществления соединение с компьютером «C» выполняется посредством физического соединения, например, кабеля для передачи данных, предпочтительно типа USB, и периферийное контрольное устройство 1 выполнено с возможностью соединения с вышеупомянутым кабелем.
В соответствии с альтернативными вариантами осуществления, соединение осуществляется посредством беспроводного подключения для передачи данных, такого как, например, Wi-Fi® или Bluetooth®, и периферийное контрольное устройство 1 содержит устройства, предназначенные для установления соединения для беспроводной передачи данных.
Периферийное контрольное устройство 1, в соответствии с настоящим изобретением, содержит рычаг 6 управления, выполненный с возможностью воспроизведения ручки или рукоятки гибкого эндоскопа для медицинского применения, снабженный соответствующими приводными механизмами 8а, 8b, 8c, 8d, 9, «а», 8e, 8f.
Рычаг 6 управления соединен с соответствующим монтажным элементом 2.
Монтажный элемент 2 составляет опорную базу, которая является устойчивой во время использования рычага 6 управления.
Монтажный элемент 2 снабжен одной или несколькими присосками 2а, обеспечивающими крепление на опорной поверхности.
Рычаг 6 управления соединен с монтажным элементом 2 посредством шарнира 7.
В предпочтительном варианте осуществления шарнир 7 позволяет осуществление вращений рычага 6 управления вокруг своей оси вращения «А1» и вариации наклона оси вращения «A1» по отношению к монтажному элементу 2.
По меньшей мере в одном конкретном варианте осуществления шарнир 7 содержит упругое соединение 7а, предпочтительно состоящее из упругого элемента и сферической муфты 7b.
Упругое соединение 7а предпочтительно состоит из упругого зажима с длиной менее 5 см.
Назначением упругого соединения 7а является увеличение свободы перемещения рычага 6 управления для лучшей имитации движения ручки гибкого эндоскопа для медицинского применения.
Рычаг 6 управления содержит направляющие ручки 8а, выполненные с возможностью имитации вращения наконечника эндоскопа, и элемент 8b для блокировки положения направляющих ручек 8а.
Рычаг 6 управления содержит один или несколько активирующих элементов 8с, выполненных с возможностью имитации действия продувочного/промывочного клапана и всасывающего клапана 8c.
Рычаг 6 управления имеет канал 9, выполненный для приема стержня «а».
Канал 9 выполнен с возможностью имитации проксимальной части операционного канала внутри эндоскопа для медицинского применения, например, канала для биопсии или канала для инструментов, которые часто совпадают.
Канал 9 предназначен для приема стержня «а» для имитации вспомогательных устройств эндоскопа для медицинского применения.
Рычаг 6 управления содержит одну или несколько вспомогательных кнопок 8d для имитации выбора принадлежности и имитации действий, выполняемых с принадлежностью.
Эти действия могут быть совмещены с продвижением стержня «а» в канале 9.
Рычаг 6 управления содержит один или несколько элементов 8f для активации вспомогательных действий, таких как, например, промывка, подведение тока и т.д.
Рычаг 6 управления содержит регулятор 8e для имитации жесткости конструкции эндоскопа.
Направляющие ручки 8а, элемент 8b для блокировки положения направляющих ручек 8а, активирующие элементы 8c, канал 9, выполненный с возможностью приема стержня «а», вспомогательные кнопки 8d, активирующие элементы 8f и регулятор 8е определяют вышеупомянутые приводные механизмы рычага 6.
Периферийное контрольное устройство 1 выполнено с возможностью преобразования движений рычага 6 управления по отношению к монтажному элементу 2 в первые электрические сигналы «s1» и передачи их на компьютер «C».
Периферийное контрольное устройство 1 содержит выход, схематически представленный в виде блока 31, для сигналов «s1», которые, таким образом, могут быть переданы на упомянутый выше компьютер «C».
Более конкретно, движения рычага 6 управления, преобразующиеся в электрические сигналы «s1», содержат вращения рычага 6 управления вокруг его продольной оси «А1» и вариации наклона продольной оси «А1».
Периферийное контрольное устройство 1 выполнено с возможностью преобразования движений рычага 6 управления в электрические сигналы «s2» и передачи их на компьютер «C».
Периферийное устройство 1 содержит выход, схематически представленный в виде блока 32, для сигналов «s2», которые, таким образом, могут быть переданы на упомянутый выше компьютер «C».
Движения рычага 6 управления представляют собой движения, выполняемые пользователем с помощью вышеупомянутых средств 8а, 8b 8c, 8d, 9, «а», 8e, 8f движения.
Более конкретно, со ссылкой на вышеуказанное, периферийное контрольное устройство 1 выполнено с возможностью преобразования движения стержня «а» в канале 9, вращения направляющих ручек 8а, перемещения блокирующего элемента 8b, активации кнопок 8c движения, активации вспомогательных кнопок 8d, активирующих элементов 8f и регулятора 8e в электрические сигналы «s2».
Периферийное контрольное устройство 1 выполнено с возможностью обнаружения присутствия стержня «а» в канале 9 и преобразования первого срабатывания стержня «а» в канале 9 в первый электрический сигнал «s2».
Периферийное контрольное устройство 1 выполнено с возможностью преобразования срабатывания направляющей ручки и/или блокирующего элемента 8b во второй электрический сигнал «s2».
Периферийное контрольное устройство 1 выполнено с возможностью преобразования срабатывания активирующего элемента 8f в третий электрический сигнал «s2».
Периферийное контрольное устройство 1 выполнено с возможностью преобразования срабатывания регулятора 8е в четвертый электрический сигнал «s2».
Согласно настоящему изобретению, периферийное контрольное устройство 1 содержит устройство 10 движения, выполненное с возможностью имитации функций и физического поведения трубчатой части эндоскопа для медицинского применения.
Периферийное контрольное устройство 1 выполнено с возможностью преобразования движений устройства 10 движения в электрические сигналы «s3» и передачи их на компьютер «C».
Устройство 10 движения содержит основной элемент 11 и основной несущий корпус 3 основного элемента 11.
Элемент 11 воспроизводит, как поясняется ниже, гибкий элемент настоящего эндоскопа; в этом смысле элемент 11 также упоминается как трубчатый элемент, поскольку настоящий эндоскоп является полым внутри.
Несущий корпус 3 содержит опорное основание 5, предпочтительно содержащее группу присосок 5а для закрепления несущего корпуса 3 на опорной поверхности.
Следует отметить, что в показанном варианте осуществления опорный элемент 3 рычага 6 управления и несущий корпус 3 устройства 10 движения составляют единый корпус 4.
В качестве альтернативы, опорный элемент 3 рычага 6 управления и несущий корпус 3 устройства 10 движения отличаются друг от друга и физически разделены.
Согласно этой конфигурации, можно закрепить опорный элемент 3 рычага 6 управления и несущий корпус 3 устройства 10 движения на соответствующих опорных подушках и на расстоянии, определенном пользователем.
Следует отметить, однако, что, независимо от того, являются ли опорный элемент 3 рычага 6 управления и несущий корпус 3 устройства 10 движения физически соединенными или разделенными, компьютер «С» выполнен с возможностью одновременной обработки электрических сигналов, вырабатываемых рычагом 6 управления и устройством 10 движения для имитации правильной работы эндоскопа.
Термин «компьютер «С» используется для обозначения любого компьютера, такого как персональный компьютер, который способен обрабатывать эти сигналы «s1», «s2», «s3».
Обработка может осуществляться с помощью программного обеспечения, установленного на компьютере, или онлайн по известным методикам.
Различные варианты осуществления формы устройства 10 движения описаны ниже.
В целом, трубчатый элемент 11 имеет главную продольную ось простирания «A2», по отношению к поперечному простиранию.
В соответствии с вариантами осуществления, показанными на фиг. 1-7, трубчатый элемент 11 является гибким, поскольку он выполнен с возможностью изгиба на 180° вдоль главной оси простирания «А2» без разлома или пластической деформации.
Предпочтительно, в соответствии с этими вариантами осуществления, трубчатый элемент 11 выполнен из эластомера.
В предпочтительном варианте осуществления трубчатый элемент 11 обладает механическими характеристиками, которые воспроизводят характеристики трубчатой части гибкого эндоскопа для медицинского применения.
Как можно заключить из чертежей, по меньшей мере часть трубчатого элемента 11 расположена внутри несущего корпуса 3, и по меньшей мере часть его расположена вне корпуса.
В соответствии с вариантами осуществления, показанными на фиг. 1-8, трубчатый элемент 11 может двигаться вручную пользователем внутри и снаружи несущего корпуса 3, вдоль направления, параллельного его оси простирания «A2» (перемещение «Т»), и может вращаться вокруг своей главной оси простирания «A2» (вращение «R»), имитируя движения, которые могут быть выполнены врачом с использованием трубчатой части эндоскопа.
Для этой цели на наружной части трубчатого элемента 11 расположена захватная поверхность 12, которая способствует удержанию трубчатого элемента 11 пользователем для выполнения движения вдоль его главной оси простирания «A2» или вокруг нее.
В вариантах осуществления, показанных на фиг. 1, 4, 6 и 7, захватная поверхность 12 совпадает с наружной поверхностью трубчатого элемента 11.
В вариантах осуществления на фиг. 5 и 8 устройство 10 движения содержит ручку 16, имеющую захватную поверхность 12 для движения гибкого элемента 11.
Согласно первому варианту осуществления, показанному на фиг. 1-3 и 11, трубчатый элемент 11 представляет собой замкнутый элемент, без свободных концов.
Другими словами, трубчатый элемент 11 образует замкнутый контур.
Другими словами, со ссылкой на фиг. 1-3, трубчатый элемент 11 имеет кольцеобразную форму.
Со ссылкой на фиг. 12, трубчатый элемент 11 имеет форму цифры восемь.
В альтернативном варианте трубчатый элемент 11 может иметь любую форму при условии, что он является замкнутым элементом.
В соответствии с этим вариантом осуществления, по меньшей мере часть трубчатого элемента 3 расположена внутри коробчатого корпуса 3.
Более конкретно, несущий корпус 3 имеет два отверстия 14, каждое из которых предназначено для соответствующего ответвления трубчатого элемента 11, для обеспечения прохождения между внутренней и наружной стороной несущего корпуса 3.
Еще более конкретно, несущий корпус 3 имеет два отверстия 14 для прохождения верхней и нижней части трубчатого элемента 11 по отношению к опорному основанию 5.
Этот вариант осуществления значительно снижает габаритные размеры и позволяет существенно упростить конструкцию по отношению к классической конфигурации, в которой трубчатая часть эндоскопа является элементом с длиной около 2 метров.
В результате, благодаря своей закрытой форме, трубчатый элемент 11 может бесконечно скользить внутри несущего корпуса 3, не достигая конечного упора.
Для обеспечения движения трубчатого элемента 11 внутри и снаружи несущего корпуса 3, несущий корпус 3 содержит барабан 15, выполненный с возможностью вращения вокруг своей собственной оси вращения 15а.
Вращающийся барабан 15 имеет внешнюю поверхность, которая может быть соединена с частью трубчатого элемента 11, который расположен на ней, повторяя ее кривизну.
Предпочтительно, вращение вращающегося барабана 15 вокруг своей собственной оси вращения 15а ограничивается перемещением «T» трубчатого элемента 11 вдоль его главной оси простирания «А2» и, следовательно, является мерой вышеупомянутого перемещения.
Периферийное контрольное устройство 1 содержит первый датчик 13а вращения трубчатого элемента 11 вокруг его главной оси простирания «А2».
Первый датчик 13а вращения расположен внутри несущего корпуса 3 и взаимодействует с частью трубчатого элемента 3.
Периферийное контрольное устройство 1 содержит второй датчик 13b, выполненный с возможностью измерения перемещения «T» трубчатого элемента 11 вдоль его главной оси простирания «А2», предпочтительно путем измерения вращения вращающегося барабана 15.
В варианте первого варианта осуществления, показанного на фиг 4, периферийное контрольное устройство 1 имеет все признаки, описанные выше, и второй вращающийся барабан 15b, расположенный внутри несущего корпуса 3, который может быть соединен с частью трубчатого элемента 11, который расположен на нем, повторяя его кривизну.
Две вращающихся барабана 15 и 15а удерживают трубчатый элемент 11 под натяжением.
Предпочтительно, трубчатый элемент 11 предварительно нагружен и не подвержен неустойчивости при сжатии.
Третий вариант осуществления, показанный на фиг. 5, аналогичен второму решению, описанному выше.
В отличие от второго решения, устройство 10 движения содержит ручку 16, имеющую захватную поверхность 12 для движения гибкого элемента 11.
Ручка 16 может быть соединена с трубчатым элементом 11 таким образом, что перемещение ручки 16 ограничивается перемещением «T» трубчатого элемента 11 вдоль его главной оси простирания «А2».
В этом варианте осуществления ручка 16 обеспечивает вращение трубчатого элемента 11 вокруг его главной оси простирания «А2».
В альтернативном варианте ручка 16 может вращаться (вращение «R») вокруг оси простирания «А2», как в вариантах, показанных на фиг. 8 и 9. В этом случае первый датчик 13а для измерения вышеупомянутого вращения располагается внутри ручки 16.
Варианты осуществления, показанные на фиг. 6, 7 и 8, отличаются от первого варианта тем, что трубчатый элемент 11 имеет соответствующие свободные концы с двух сторон.
В этом варианте отсутствует вращающийся барабан 15, 15b.
Согласно этому варианту осуществления, несущий корпус 3 имеет одно проходное отверстие 14 для прохождения одного трубчатого элемента 11 внутри несущего корпуса 3.
Согласно этому решению, для измерения перемещения «T» трубчатого элемента 11 вдоль его главной оси простирания «A2» периферийное контрольное устройство 1 содержит второй датчик 13b, расположенный внутри коробчатого корпуса 3, который взаимодействует с соответствующей частью трубчатого элемента 11.
У четвертого варианта осуществления имеется два варианта: «длинный» и «короткий». В «длинном» варианте, изображенном на фиг. 6, трубчатый элемент 11 имеет длину, сравнимую с трубчатой частью эндоскопа для медицинского применения.
Предпочтительно, несущий корпус 3 имеет проход 14а сзади для выхода концевой части трубчатого элемента 11. В «коротком» варианте, изображенном на фиг. 7, трубчатый элемент 11 имеет длину, существенно меньшую, чем у трубчатой части гастрического эндоскопа.
Согласно этому варианту, несущий корпус 3 не имеет прохода 14 сзади для выхода концевой части трубчатого элемента 11.
Пятый вариант осуществления, показанный на фиг. 8, можно сравнить с «коротким» вариантом, описанным выше, с той разницей, что трубчатый элемент 11 состоит из жесткого стержня, предпочтительно имеющего длину, существенно меньшую, чем у трубчатой части эндоскопа для медицинского применения. Вышеупомянутый стержень является жестким в том, что он не испытывает заметных деформаций в условиях усилий, которые создаются при нормальной имитации эндоскопической процедуры.
В этом пятом решении несущий корпус 3 содержит внутри направляющую 20, которая соответствует форме трубчатого элемента 11, обеспечивающую перемещение «T» и/или вращение «R».
В шестом варианте осуществления, показанном на фиг. 9, несущий корпус 3 содержит жесткий опорный стержень 3а, составляющий одно целое с ним, предпочтительно имеющий длину, существенно меньшую, чем у трубчатой части эндоскопа для медицинского применения.
В соответствии с этим вариантом осуществления, устройство 10 движения состоит из корпуса, имеющего внутреннюю соединительную поверхность с формой, которая соответствует внешней поверхности опорного стержня 3а.
Устройство 10 движения также имеет наружную поверхность, определяющую захватную поверхность 12.
Захватная поверхность 12 определяется ручкой 16.
В соответствии с этим вариантом осуществления, ручка 16 установлена на опорном стержне 3a с возможностью скольжения вдоль продольной оси «А2» (перемещение «Т»).
Предпочтительно, ручка 16 вращается вокруг вышеупомянутой продольной оси «A2» (вращение «R»).
В этом варианте осуществления ручка 16 содержит первый датчик 13а для измерения вращения «R» устройства 10 движения вокруг опорного стержня 3а и второй датчик 13b для измерения перемещения «T» устройства 10 движения вдоль опорного стержня 3a. Предпочтительно, во всех вариантах осуществления, описанных выше, периферийное контрольное устройство 1 выполнено с возможностью обнаружения и/или измерения движений устройства 10 движения и преобразования их в электрические сигналы «s3», и передачи их на компьютер «C».
Первый датчик 13а выполнен с возможностью преобразования вращения захватной поверхности 12 в первый электрический сигнал «s3».
Второй датчик 13b выполнен с возможностью преобразования перемещения захватной поверхности 12 во второй электрический сигнал «s3».
Более конкретно, он измеряет перемещение «T», которое может осуществляться посредством ручного усилия, оказываемого на захватную поверхность 12 вдоль оси перемещения, предпочтительно совпадающей с главной осью простирания «А2» трубчатого элемента 11, посредством второго датчика 13b.
Аналогичным образом, периферийное контрольное устройство 1 измеряет вращение «R», которое может осуществлять посредством ручного вращения захватной поверхности 12 вокруг упомянутой выше оси перемещения, с помощью первого датчика 13а.
Предпочтительно, периферийное контрольное устройство 1, в соответствии с показанными вариантами осуществления, содержит устройства 17 обратной связи, выполненные с возможностью приложения усилия отклика к ручному перемещению гибкого элемента 11. Вышеупомянутое усилие отклика имитирует, при использовании, физиологическую реакцию на введение эндоскопа для медицинского применения в организм.
В соответствии с вариантами осуществления, в которых трубчатый элемент 11 короче, чем трубчатая часть эндоскопа для медицинского применения, или, в любом случае, максимальный диапазон устройства 10 движения меньше, чем необходимо, периферийное устройство 1 содержит элемент 18 управления подвеской, предпочтительно, расположенный на захватной поверхности 12.
Элемент 18 управления подвеской, предпочтительно, может управляться вручную пользователем.
Предпочтительно, чтобы он был выполнен с возможностью временной отсрочки усилия обратной связи на гибкий элемент 11.
Он также делает возможным изменение электрических сигналов «s3» таким образом, что компьютер «С» может игнорировать любое движение устройства 10 движения, когда приводится в действие элемент 18 управления подвеской.
Назначением элемента 18 управления подвеской является возврат гибкого элемента 11, если он достигает конечного положения.
Компьютер «С» выполнен с возможностью обеспечения вывода, с помощью средства отображения, подключенного к нему, ответа, производимого при обработке электрических сигналов, полученных им.
Компьютер «С» выполнен с возможностью подключения к Интернету посредством соединения для передачи данных.
Изобретение достигает поставленной цели путем преодоления недостатков предшествующего уровня техники.
Фактически периферийное контрольное устройство 1 эффективно имитирует механику эндоскопа для медицинского применения и поэтому подходит для обучения базового уровня. В то же время, благодаря изменению конструкции относительно известных тренажеров, оно значительно дешевле, является компактным и портативным.
В результате, периферийное контрольное устройство 1, как таковое, имеет низкую стоимость и простую конструкцию.
Выходы 31, 32, 33 обеспечивают возможность подключения периферийного устройства 1 к любой внешней вычислительной машине «C», выполненной с возможностью обработки сигналов s1, s2, s3, поступающих из периферийного устройства 1.
На фиг. 10 цифрой 100 обозначен тренажер для эндоскопии в соответствии с настоящим изобретением.
Тренажер 100 содержит портативное периферийное контрольное устройство 1 и компьютер «C».
Компьютер «С» выполнен с возможностью одновременной обработки электрических сигналов «s1», «s2», «s3», производимых рычагом 6 управления и устройством 10 движения, и имитации работы настоящего эндоскопа.
Как показано, в качестве примера, компьютер «С» содержит группу входов С1, С2, С3 для подключения к выходам 31, 32, 33, в соответствии с, например, способами, упомянутыми выше.
В одном варианте осуществления тренажер 100 содержит программное обеспечение для имитации, установленное на компьютер «C».
В одном варианте осуществления работа компьютера «C» обеспечивается относительной возможностью подключения к сети, например, благодаря программному обеспечению для имитации, доступному онлайн.
Такой тренажер является «портативным», поскольку на практике периферийное устройство 1 может с легкостью транспортироваться и подключаться к любому компьютеру или ПК.
Таким образом, настоящее изобретение предлагает периферийное контрольное устройство, имитирующее эндоскопическую процедуру, подходящее для широкого распространения и домашнего обучения. Кроме того, благодаря возможностям подключения, настоящее изобретение может быть эффективно использовано для подключения к любому персональному компьютеру. Этот аспект облегчает обновление программного обеспечения и позволяет создать онлайн-платформу, которая будет использоваться для обучения использованию эндоскопа, и может иметь, в случае необходимости, учебные пособия и систему оценок, таким образом, сокращая время, которое требуется опытным хирургам на проведение базового обучения.
В отличие от известных тренажеров, периферийное устройство и вычислительные мощности компьютера не объединены в единый инструмент, но отделены друг от друга, предоставляя пользователю возможность подключения периферийного контрольного устройства к наиболее удобному или предпочтительному компьютеру.
Более конкретно, периферийное устройство является портативным и может использоваться в любом желаемом месте или среде.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС РАЗЪЕМНОГО УПРАВЛЯЕМОГО ЭНДОСКОПА | 2018 |
|
RU2728186C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2666261C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТРЕНАЖЕР | 2017 |
|
RU2734188C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2662277C2 |
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| ИНСТРУМЕНТЫ НАВЕДЕНИЯ ДЛЯ РУЧНОГО УПРАВЛЕНИЯ ЭНДОСКОПОМ С ПОМОЩЬЮ 3D-ИЗОБРАЖЕНИЙ, ПОЛУЧЕННЫХ ДО ОПЕРАЦИИ И ВО ВРЕМЯ ОПЕРАЦИИ | 2013 |
|
RU2668490C2 |
| ВАКУУМНАЯ СИСТЕМА И ЭНДОСКОПИЧЕСКАЯ СИСТЕМА ДЛЯ ЭНДОСКОПИЧЕСКОЙ ВАКУУМ-ТЕРАПИИ | 2012 |
|
RU2562680C2 |
| Устройство для эндоскопии и способ его использования (варианты) | 2023 |
|
RU2805798C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| МИНИИНВАЗИВНОЕ УСТРОЙСТВО ДЛЯ ЭНДОУРОЛОГИЧЕСКОГО ЛЕЧЕНИЯ | 2017 |
|
RU2731804C2 |
Группа изобретений относится к медицине. Портативное периферийное контрольное устройство для тренажера имитации эндоскопической процедуры содержит: монтажный элемент; рычаг управления, прикрепленный к монтажному элементу и воспроизводящий рукоятку гибкого эндоскопа для медицинского применения, при этом рычаг управления имеет группу приводных механизмов, выполненных с возможностью копирования соответствующих приводных механизмов, содержащихся на рукоятке гибкого эндоскопа для медицинского применения, устройство движения, выполненное с возможностью имитации движения трубчатого элемента гибкого эндоскопа; периферийное контрольное устройство, выполненное с возможностью преобразования по меньшей мере одного срабатывания рычага управления в электрический сигнал «s1», означающий срабатывание, периферийное контрольное устройство, выполненное с возможностью преобразования по меньшей мере одной активации приводного механизма в электрический сигнал «s2», означающий активацию, периферийное контрольное устройство, выполненное с возможностью преобразования движения устройства движения в электрический сигнал «s3», означающий движение, периферийное контрольное устройство, содержащее по меньшей мере один выход для электрических сигналов «s1», «s2» «s3». При этом устройство движения содержит несущий корпус и основной элемент, соединенный с несущим корпусом; при этом устройство движения включает захватную поверхность, посредством которой имитируется движение трубчатого элемента гибкого эндоскопа; при этом захватная поверхность является частью основного элемента или выполнена с возможностью движения относительно основного элемента. Тренажер для эндоскопии содержит портативное периферийное контрольное устройство и компьютер, выполненный с возможностью одновременной обработки электрических сигналов «s1», «s2», «s3», производимых рычагом управления и устройством движения, и имитации работы эндоскопа. Применение данной группы изобретений позволит учащимся выполнять упражнения с имитацией эндоскопических процедур в любых условиях, даже бытовых, по меньшей мере для приобретения базовых навыков, и устройство легко переносится, так как обладает уменьшенными габаритами и весом. 2 н. и 21 з.п. ф-лы, 11 ил.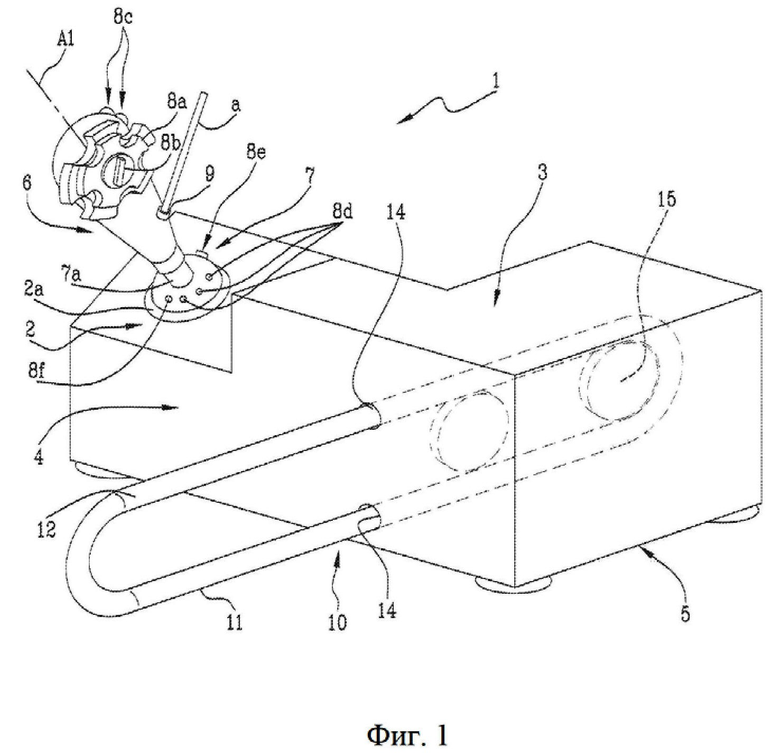
1. Портативное периферийное контрольное устройство (1) для тренажера имитации эндоскопической процедуры, содержащее:
- монтажный элемент (2);
- рычаг (6) управления, прикрепленный к монтажному элементу (2) и воспроизводящий рукоятку гибкого эндоскопа для медицинского применения, при этом рычаг (6) управления имеет группу приводных механизмов (8а, 8b 8c, 8d, 9, «а», 8е, 8f), выполненных с возможностью копирования соответствующих приводных механизмов, содержащихся на рукоятке гибкого эндоскопа для медицинского применения;
- устройство (10) движения, выполненное с возможностью имитации движения трубчатого элемента гибкого эндоскопа;
периферийное контрольное устройство (1), выполненное с возможностью преобразования по меньшей мере одного срабатывания рычага (6) управления в электрический сигнал «s1», означающий срабатывание,
периферийное контрольное устройство (1), выполненное с возможностью преобразования по меньшей мере одной активации приводного механизма (8a, 8b 8c, 8d, 9, «а», 8e, 8f) в электрический сигнал «s2», означающий активацию,
периферийное контрольное устройство (1), выполненное с возможностью преобразования движения устройства (10) движения в электрический сигнал «s3», означающий движение,
периферийное контрольное устройство, содержащее по меньшей мере один выход (31, 32, 33) для электрических сигналов «s1», «s2» «s3»,
при этом устройство (10) движения содержит несущий корпус (3) и основной элемент (11), соединенный с несущим корпусом (3); при этом устройство (10) движения включает захватную поверхность (12), посредством которой имитируется движение трубчатого элемента гибкого эндоскопа; при этом захватная поверхность (12) является частью основного элемента (11) или выполнена с возможностью движения относительно основного элемента (11).
2. Портативное периферийное контрольное устройство (1) по п. 1, в котором рычаг (6) управления крепится к монтажному элементу (2) таким образом, что после приведения в действие допускаются вариации наклона относительной продольной оси (А1) по отношению к монтажному элементу (2).
3. Портативное периферийное контрольное устройство (1) по п. 1 или 2, в котором рычаг (6) управления крепится к монтажному элементу (2) таким образом, что после приведения в действие допускаются вращения рычага (6) управления вокруг относительной продольной оси (А1).
4. Портативное периферийное контрольное устройство (1) по любому из предшествующих пунктов, в котором приводные механизмы содержат канал (9) и стержень, который может быть вставлен в канал, при этом канал (9) воспроизводит проксимальную часть операционного канала внутри гибкого эндоскопа для медицинского применения, при этом периферийное контрольное устройство (1) выполнено с возможностью обнаружения присутствия стержня «а» в канале (9) и преобразования первого срабатывания стержня «а» в канале (9) в первый электрический сигнал «s2».
5. Портативное периферийное контрольное устройство (1) по п. 4, в котором приводные механизмы содержат по меньшей мере одну вспомогательную кнопку (8d) для выбора по меньшей мере одного способа преобразования первого срабатывания, в зависимости от типа инструмента, имитируемого стержнем «а».
6. Портативное периферийное контрольное устройство (1) по любому из предшествующих пунктов, в котором приводные механизмы содержат по меньшей мере одну направляющую ручку (8а), выполненную с возможностью имитации вращения наконечника гибкого эндоскопа, и блокирующий элемент (8b) направляющей ручки (8а); при этом периферийное контрольное устройство (1) выполнено с возможностью преобразования срабатывания направляющей ручки и/или блокирующего элемента (8b) во второй электрический сигнал «s2».
7. Портативное периферийное контрольное устройство (1) по любому из предшествующих пунктов, в котором приводные механизмы содержат по меньшей мере один элемент (8f) для активации вспомогательных приспособлений; при этом периферийное контрольное устройство (1) выполнено с возможностью преобразования срабатывания активирующего элемента (8f) в третий электрический сигнал «s2».
8. Портативное периферийное контрольное устройство (1) по любому из предшествующих пунктов, в котором приводные механизмы содержат регулятор (8e) для имитации жесткости гибкого эндоскопа; при этом периферийное контрольное устройство (1) выполнено с возможностью преобразования срабатывания регулятора (8e) в четвертый электрический сигнал «s2».
9. Портативное периферийное контрольное устройство (1) по любому из пп. 1-8, в котором захватная поверхность (12) выполнена с возможностью движения вдоль оси перемещения для выполнения перемещений (T) как функции ручного усилия, оказываемого на захватную поверхность (12), при этом движения устройства (10) движения содержат перемещения (Т) для имитации перемещения трубчатого элемента гибкого эндоскопа.
10. Портативное периферийное контрольное устройство (1) по любому из пп. 1-9, в котором захватная поверхность (12) выполнена с возможностью вращения вокруг оси перемещения для выполнения вращений (R) как функции ручного скручивающего усилия, оказываемого на захватную поверхность; при этом движения устройства (10) движения содержат вращения (R) для имитации вращения трубчатого элемента гибкого эндоскопа.
11. Портативное периферийное контрольное устройство (1) по любому из предшествующих пунктов, содержащее по меньшей мере одно устройство (17) обратной связи, выполненное с возможностью приложения усилия отклика на ручное перемещение устройства (10) движения, при этом усилие отклика имитирует, при использовании, физиологическую реакцию на введение эндоскопа для медицинского применения в организм.
12. Портативное периферийное контрольное устройство (1) по любому из пп. 1-11, в котором устройство (10) движения содержит первый датчик (13а) для измерения вращения (R) захватной поверхности (12); при этом первый датчик (13а) выполнен с возможностью преобразования вращения захватной поверхности (12) в первый электрический сигнал «s3».
13. Портативное периферийное контрольное устройство (1) по любому из пп. 1-12, в котором устройство (10) движения содержит второй датчик (13b) для измерения перемещения захватной поверхности (12); при этом второй датчик (13b) выполнен с возможностью преобразования перемещения захватной поверхности (12) во второй электрический сигнал «s3».
14. Портативное периферийное контрольное устройство (1) по п. 1, в котором основной элемент (11) частично закрыт несущим корпусом (3), при этом несущий корпус (3) содержит по меньшей мере один проход (14) для основного элемента (11).
15. Портативное периферийное контрольное устройство (1) по п. 14, в котором основной элемент (11) является гибким.
16. Портативное периферийное контрольное устройство (1) по п. 15, в котором основной элемент (11) является замкнутым элементом; при этом трубчатый элемент (11) составляет замкнутый контур.
17. Портативное периферийное контрольное устройство (1) по п. 1, содержащее вращающийся барабан (15), при этом вращающийся барабан (15) имеет внешнюю поверхность, которая может быть соединена с основным элементом (11), при этом вращение барабана (15) привязано к перемещению (T) основного элемента (11).
18. Портативное периферийное контрольное устройство (1) по п. 1, в котором трубчатый элемент (11) представляет собой жесткий стержень, при этом несущий корпус (3) содержит продольную направляющую (20) с формой, соответствующей жесткому стержню, предназначенную для обеспечения перемещения (Т) жесткого стержня.
19. Портативное периферийное контрольное устройство (1) по п. 1, в котором несущий корпус (3) содержит опорный стержень (3а), при этом захватная поверхность (12) выполнена с возможностью перемещения на опорном стержне (3а).
20. Тренажер для эндоскопии, содержащий портативное периферийное контрольное устройство по любому из предшествующих пунктов, и компьютер (C), выполненный с возможностью одновременной обработки электрических сигналов «s1», «s2», «s3», производимых рычагом (6) управления и устройством (10) движения, и имитации работы эндоскопа, при этом компьютер (C) содержит по меньшей мере один вход (С1, С2, С3) для соединения с выходом (31, 32, 33),
при этом устройство (10) движения содержит несущий корпус (3) и основной элемент (11), соединенный с несущим корпусом (3); при этом устройство (10) движения включает захватную поверхность (12), посредством которой имитируется движение трубчатого элемента гибкого эндоскопа; при этом захватная поверхность (12) является частью основного элемента (11) или выполнена с возможностью движения относительно основного элемента (11).
21. Тренажер для эндоскопии по п. 20, содержащий программное обеспечение для имитации, установленное на компьютере (C).
22. Тренажер для эндоскопии по п. 20, содержащий программное обеспечение для имитации, доступное онлайн с использованием компьютера (C).
23. Тренажер для эндоскопии по любому из пп. 20-22, в котором компьютер (C) выполнен с возможностью подключения средства отображения, подключенного к нему для вывода ответа, полученного посредством обработки электрических сигналов «s1», «s2», «s3».
| EP 2899711 A1, 29.07.2015 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "КОТЛЕТЫ ОБЖАРЕННЫЕ В ЧИЛИЙСКОМ СОУСЕ" | 2012 |
|
RU2511338C1 |
| RU 2012148377 A, 20.05.2014. | |||

