Предлагаемое изобретение относится к области удовлетворения жизненных потребностей человека, конкретно - к эндоскопии и может быть использовано в медицине и ветеринарии, в сочетании с эндоскопическими инструментами для малоинвазивных медицинских вмешательств.
Использованные в описании термины и сокращения:
ЖКТ - желудочно-кишечный тракт.
ВПС - верхний пищеводный сфинктер.
Внутреннее операционное пространство - в контексте настоящего описания внутренний просвет (исследуемая полость) любого полого органа, например, желудка или прямой кишки, раздутый воздухом или иной газообразной средой под небольшим давлением для последующей диагностики и/или лечебно-операционного вмешательства.
Дистальный конец эндоскопа - дальний от оператора управляемый конец гибкой рабочей части эндоскопа, вводимый в просвет внутренних органов (внутренний конец).
Проксимальный конец эндоскопа - ближний к оператору конец гибкой рабочей части эндоскопа, расположенный снаружи пациента (наружный конец).
Штатные каналы - каналы, размещенные внутри гибкой рабочей части эндоскопа, рукоятке и в соединительном кабеле с разъемом осветителя: штатный рабочий аспирационно-инструментальный/биопсийный канал (далее - штатный рабочий канал); канал передачи освещения; канал передачи изображения; канал комбинированный для подачи воздуха и воды; каналы для размещения кинематики [Хацевич Т.Н. Эндоскопы: учебн. пособие/ Т.Н. Хацевич, И.О. Михайлов. -2-е изд., доп. и расш. - Новосибирск: СГГА, 2012. - С.81.].
КД - клипса-держатель.
НИК - навесной инструментальный канал.
Угол «атаки» - угол наклона оси операционного действия [http://www.redov.ru/ medicina/sovety_molodomu_hirurgu/p10.php] или угол наклона инструмента к объекту операции.
Замок zip lock -замок-застежка из двух полос: шов соединяется внахлест плавно, у него нет зубцов. Застегивание происходит по мере надавливания на направляющие элементы друг в друга [https://vyvoz.org/blog/chto-takoe-zip-lock-pakety-i-upakovka /?ysclid=ldlqcysxr7376380077].
Расположение навесных инструментальных каналов (НИК) по часовому циферблату - в зависимости от ситуации для обеспечения доступа эндоскопического инструмента к любому участку исследуемого или оперируемого органа навесные инструментальные каналы располагают по периметру (окружности) гибкой рабочей части эндоскопа с возможностью их фиксации по часовому циферблату, например, на 3-х, 5-ти, 6-ти и 8-ми часах.
Наружные размеры медицинских гибких эндоскопов (длина и диаметр/поперечное сечение гибкой рабочей части) ограничиваются природными факторами - местонахождением исследуемой полости и напрямую зависят от размеров естественных отверстий тела людей и животных, растяжимости биологических тканей (кожи, слизистых оболочек и сфинктеров) вокруг отверстий, например, вокруг глотки или вокруг анального канала, проходного сечения просвета полых органов. Цепочка взаимосвязанных ограничений является ключевой особенностью, вносящей существенные технические ограничения в конструкцию всех типов гибких эндоскопов. Это существенно ограничивает область применения эндоскопов.
Диагностику и большинство малоинвазивных медицинских вмешательств производят в рядовых лечебно-профилактических учреждениях (поликлиника, районный стационар) с использованием наиболее доступных серийных эндоскопов с одним штатным рабочим каналом, с применением разнообразных эндоскопических инструментов, ассортимент и количество которых при проведении эндоскопических вмешательств превосходит количество рабочих каналов эндоскопа.
В процессе работы, по мере необходимости, неоднократно производят замену инструментов путем введения и извлечения их через штатный рабочий канал эндоскопа, что увеличивает продолжительность медицинского вмешательства, сопровождается длительным пребыванием пациента в состоянии дискомфорта, нарастающей утомляемостью оператора и снижением концентрации его внимания.
Для удовлетворения потребности одновременной работы  количеством инструментов необходимо увеличить количество штатных рабочих каналов серийных эндоскопов, что технически невозможно вследствие ограниченности размеров - наружного и внутреннего диаметров гибкой рабочей части эндоскопа, обусловленной проходным сечением просвета внутренних органов. Уплотнение монтажа размещаемых внутри гибкой рабочей части эндоскопов оптико-механических частей ради увеличения количества рабочих каналов нецелесообразно - это снижает гибкость эндоскопов (возрастает их жесткость), что существенно ухудшает управляемость эндоскопа в процессе работы оператора и качество визуализации объекта, причиняет боль пациенту во время исследования. Эти недостатки и ограничения усложняют работу оператора и снижают качество лечебно-диагностического процесса.
количеством инструментов необходимо увеличить количество штатных рабочих каналов серийных эндоскопов, что технически невозможно вследствие ограниченности размеров - наружного и внутреннего диаметров гибкой рабочей части эндоскопа, обусловленной проходным сечением просвета внутренних органов. Уплотнение монтажа размещаемых внутри гибкой рабочей части эндоскопов оптико-механических частей ради увеличения количества рабочих каналов нецелесообразно - это снижает гибкость эндоскопов (возрастает их жесткость), что существенно ухудшает управляемость эндоскопа в процессе работы оператора и качество визуализации объекта, причиняет боль пациенту во время исследования. Эти недостатки и ограничения усложняют работу оператора и снижают качество лечебно-диагностического процесса.
Заявителем из исследованного уровня техники выявлены аналоги предполагаемого изобретения. При описании аналогов использована терминология их (аналогов) описаний.
Из исследованного уровня техники известен гибкий диагностический эндоскоп [Хацевич Т.Н. Эндоскопы: учебн. пособие/ Т.Н. Хацевич, И.О. Михайлов. - 2-е изд., доп. и расш. - Новосибирск: СГГА, 2012. - С. 80]. Известный эндоскоп имеет штатное оснащение: гибкую рабочую часть с управляемым дистальным концом, содержащую внутри штатные каналы: освещения, передачи изображения, комбинированный подачи воздуха и воды, штатный рабочий аспирационно-инструментальный/биопсийный (далее - рабочий канал), размещения кинематики, при этом каналы освещения и передачи изображения заканчиваются на торце управляемого дистального конца гибкой рабочей части линзами, рабочий канал выходным отверстием, комбинированный канал подачи воздуха и воды - форсункой; рукоятку с расположенными на ней ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопку управления аспирацией, кнопку подачи воздуха и воды, отверстие входное в рабочий канал, механизмы привода управляемого дистального конца гибкой рабочей части, расположенные внутри рукоятки; соединительный кабель с разъемом (далее - соединительный кабель) для соединения эндоскопа с внешним источником света, помпой для подачи воздуха и воды, и аспиратором; снаружи эндоскоп покрыт эластичной герметичной оболочкой.
Недостатками известного эндоскопа являются:
- ограниченность количества рабочих каналов, что не позволяет выполнять одновременные манипуляции количеством инструментов при возникновении такой потребности;
- отсутствие возможности изменения угла «атаки» инструментов без изменения позиции эндоскопа;
- отсутствие возможности перехода от диагностики к лечебным манипуляциям без замены диагностического эндоскопа на операционный вследствие ограниченности количества рабочих каналов и, вследствие этого, используемых инструментов, из-за чего вынужденно и последовательно используют сначала диагностический эндоскоп, затем - операционный. При этом возникает разрыв во времени между процессами диагностики и лечебными манипуляциями, который может составлять от нескольких минут до нескольких часов и даже суток;
- необходимость пополнения раздувающего газа в ходе медицинского вмешательства вследствие того, что при работе происходит постоянная утечка раздувающего газа из исследуемой полости через зазор между стенкой рабочего канала и трубчатым корпусом инструментов.
Известно изобретение по патенту RU 2553499 «Устройство для фиксации внешнего катетера эндоскопа». Сущностью является устройство для фиксации внешнего катетера эндоскопа, содержащее крепящие элементы, отличающиеся тем, что крепящие элементы выполнены в виде двух механически сопряженных полуколец, обращенных в противоположные стороны, внутренний диаметр которых соответствует внешнему диаметру катетера и внешнему диаметру эндоскопа, причем диаметр меньшего полукольца составляет 2 - 6 диаметра катетера, а диаметр полукольца составляет 1- 4 диаметра эндоскопа.
Недостатками известного технического решения являются:
- устройство для фиксации внешнего катетера позволяет крепить на эндоскопе только один дополнительный катетер и/или один дополнительный инструмент, судя по Рис. 1 и Рис. 2 описания патента RU 2553499;
- несмотря на наличие дополнительного катетера с инструментом на эндоскопе и свободного штатного рабочего канала, исключается одновременное использование на одном эндоскопе более 2-х инструментов (при потребности 3 -х и более инструментов);
- увеличенное (после оснащения полукольцами) поперечное сечение управляемого дистального конца гибкой рабочей части эндоскопа существенно затрудняет ввод такого эндоскопа в просвет полого органа, что весьма дискомфортно и травмоопасно для пациента;
- отсутствие возможности замены эндоскопического инструмента без извлечения эндоскопа из полого органа. Извлечение эндоскопа с целью замены инструмента в ходе одного эндоскопического вмешательства всегда сопровождается его (эндоскопа) повторным вводом. Многократный повторный ввод периодически переоснащаемого эндоскопа в процессе операции причиняет дополнительную боль и дискомфорт пациенту, повышает риск травматизации внутренних органов, продлевает продолжительность операции, доставляет неудобство в работе и повышенную утомляемость оперирующей бригаде.
Известно изобретение по патенту RU 2409305 «Устройство для многоцелевой эндоскопии».
Сущностью является устройство для многоцелевой эндоскопии, включающее гибкий каркас, канал передачи освещения, канал подачи воздуха/воды, аспирационный канал, отличающееся тем, что на дистальном конце эндоскопа установлен колпачок, снабженный по меньшей мере одним желобом с размещенным в нем трубчатым каналом с возможностью установки в нем инструментального средства, при этом размер прорези желоба составляет 0,65-0,75 диаметра желоба, внешний диаметр трубчатого канала составляет 0,95-0,98 внутреннего диаметра желоба (терминология прототипа).
Согласно описанию известное техническое решение используют следующим образом. На дистальном конце эндоскопа устанавливают колпачок, снабженный от одного до четырех желобами, с размещенными в них дополнительными трубчатыми каналами. Фиксируют трубчатый канал специальным зажимом (не показан). При этом в описании отсутствует информация о конфигурации и размерах специального зажима (или зажимов). В каждый трубчатый канал размещают петлю для электроэксцизии, коагулятор, форцепт или через один из каналов осуществляют ирригацию. С помощью механизма управления дистальным концом эндоскопа осматривают и диагностируют обследуемый орган пациента, подводят дистальный отдел эндоскопа с установленным на нем колпачком к месту производства лечебных действий и осуществляют лечебные действия с использованием зафиксированных в 4-х трубчатых каналах колпачка инструментов - петли для электроэксцизии, коагулятора, форцепта и установленного в одном из 4-х каналов ирригатора.
Недостатками известного технического решения являются:
- затрудненное введение эндоскопа в исследуемую полость пациента даже в состоянии глубокого эндотрахеального наркоза и мышечной релаксации, так как после установки колпачка существенно возрастает поперечное сечение вводимого в исследуемую/оперируемую полость управляемого дистального конца гибкого каркаса эндоскопа;
- ограниченность количества рабочих каналов и, вследствие этого, одновременно используемых инструментов (не более 4-х) не позволяет выполнять одновременные манипуляции большим количеством инструментов при возникновении такой потребности;
- отсутствие возможности изменения угла «атаки» инструментов;
- отсутствие возможности обеспечения взаимозаменяемости и ротации инструментов между собой без выемки эндоскопа из тела пациента;
- невозможность перехода от проведения диагностики к лечебным манипуляциям без замены диагностического эндоскопа на операционный вследствие ограниченности количества используемых рабочих каналов и, вследствие этого, инструментов, из-за чего вынужденно и последовательно используют сначала диагностический эндоскоп, затем - операционный. При этом возникает разрыв во времени между процессами диагностики и лечебными манипуляциями, который может составлять от нескольких минут до нескольких часов и даже суток;
- отсутствие возможности замены инструментов в трубчатых каналах без извлечения эндоскопа из исследуемой/оперируемой полости вследствие неконтролируемого смещения трубчатых каналов вплоть до их перегибов и/или переплетения между собой и гибким каркасом в результате единственного места фиксации трубчатых каналов прототипа - на колпачке, и отсутствия фиксации трубчатых каналов вдоль гибкого каркаса эндоскопа;
- наличие вероятности переплетения рукояток эндоскопических инструментов, введенных в трубчатые каналы;
- повышенная травмоопасность, болезненность, возникновение осложнений для пациента и наличие повышенной усталости оператора вследствие неоднократно выполняемых (повторных) вводов переоснащенного эндоскопа;
- необходимость пополнения раздувающего газа в ходе медицинского вмешательства вследствие того, что при работе происходит постоянная утечка раздувающего газа из исследуемой/оперируемой полости через зазор между стенкой рабочего канала и трубчатым корпусом инструментов.
Выявленные аналоги совпадают с заявленным техническим решением по отдельным совпадающим признакам, поэтому прототип не выявлен и формула изобретения составлена без ограничительной части.
Техническим результатом заявленного технического решения является устранение недостатков аналогов путем разработки устройства для эндоскопии и способа его использования (варианты), а именно - обеспечивающее:
– облегчённое введение гибкой рабочей части эндоскопа внутрь полых органов вследствие меньшего диаметра гибкой рабочей части и обтекаемой формы управляемого дистального конца;
– увеличение количества рабочих каналов и, вследствие этого, одновременно используемых инструментов, что позволяет выполнять одновременные манипуляции бóльшим количеством инструментов при возникновении такой потребности;
– возможность изменения угла «атаки» инструментов к оперируемому объекту без изменения позиции эндоскопа вследствие расположения рабочих каналов по окружности эндоскопа;
– возможность взаимозаменяемости и ротации инструментов между собой без выемки эндоскопа из тела пациента;
– возможность перехода от диагностики к лечебным манипуляциям без замены диагностического эндоскопа на операционный вследствие увеличения количества рабочих каналов и используемых в них инструментов. При этом не возникает разрыва во времени между процессами диагностики и лечебными манипуляциями;
– стабильную фиксацию навесных инструментальных каналов вдоль гибкой рабочей части и на рукоятке эндоскопа за счёт клипс-держателей и столешницы-держателя;
– надёжное расположение эндоскопических инструментов в навесных инструментальных каналах вдоль гибкой рабочей части эндоскопа;
– устранение вероятности переплетения наружных рукояток эндоскопических инструментов вследствие их фиксации на столешнице-держателе;
– снижение травмоопасности внутренних органов и риска возможных осложнений;
– снижение утомляемости оператора вследствие отсутствия повторных введений эндоскопа;
– уменьшение утечки раздувающего газа из полого органа вследствие наличия клапана.
Сущностью заявленного технического решения является устройство для эндоскопии, состоящее из эндоскопа, не менее одного навесного инструментального канала, клипс-держателей, столешницы-держателя; при этом эндоскоп содержит гибкую рабочую часть с управляемым дистальным концом, содержащую внутри штатные каналы: освещения, передачи изображения, комбинированный подачи воздуха и воды, размещения кинематики, штатный рабочий аспирационно-инструментальный/биопсийный; рукоятку с расположенными на ней ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопки управления аспирацией и подачи воздуха и воды, соединительный кабель; при этом навесные инструментальные каналы выполнены в виде трубок из диэлектрического материала, разрешённого к применению в медицине, инертного, не разрушающегося при дезинфекции, упруго-эластичного, прочного на разрыв, при этом дистальные концы навесных инструментальных каналов выполнены атравматичными – скошенными или закруглёнными, а проксимальные концы выполнены в виде воронки с возможностью введения в навесные инструментальные каналы эндоскопических инструментов и оснащены эластичным клапаном с возможностью предупреждения утечки раздувающего газа, в виде двух встречно размещённых эластичных мембран, причём каждая из мембран одним краем присоединена к краю проксимального конца навесного инструментального канала, а свободные края мембран плотно и внахлёст прилегают друг к другу, заходя одна за другую с возможностью перекрывания просвета навесного инструментального канала и предупреждения утечки раздувающего газа из оперируемой полости, а также с возможностью пропускания эндоскопического инструмента путём охвата его в виде манжеты; по всей длине наружной поверхности каждого навесного инструментального канала монолитно с ним выполнен шип продольный в виде выступа таким образом, что место соединения навесного инструментального канала и шипа продольного выполнено зауженным в виде «талии» с возможностью фиксации навесного инструментального канала в клипсах-держателях; при этом длина навесных инструментальных каналов выполнена не превышающей длину самого длинного из намеченных к применению эндоскопических инструментов; навесные инструментальные каналы зафиксированы на клипсах-держателях по окружности гибкой рабочей части по часовому циферблату с возможностью обеспечения доступа эндоскопического инструмента к участку исследуемого или оперируемого органа; при этом клипсы-держатели содержат ведущую клипсу-держатель, промежуточные клипсы-держатели и замыкающую клипсу-держатель, при этом внешняя поверхность всех клипс-держателей выполнена с продольными пазами с возможностью крепления навесных инструментальных каналов, при этом форма и размеры продольных пазов выполнены по типу замка zip lock с возможностью охвата талии шипа продольного; при этом ведущая клипса-держатель выполнена в виде трубки с возможностью её натяжения на управляемый дистальный конец; конец ведущей клипсы-держателя, обращённый в сторону полости органа, выполнен в виде юбки без продольных пазов, при этом диаметр и длина юбки зависит от пропускной способности анального сфинктера или верхнего пищеводного сфинктера пациента и от вида эндоскопического вмешательства; при этом промежуточные клипсы-держатели выполнены в виде витых пружин в количестве не менее двух, с количеством витков от 1,5 до 3,5, при этом промежуточные клипсы-держатели расположены на гибкой рабочей части на равном удалении друг от друга; при этом замыкающая клипса-держатель выполнена в виде желоба подковообразного сечения с возможностью надёжной фиксации на проксимальном конце гибкой рабочей части вплотную к рукоятке; столешница-держатель выполнена произвольной формы с U-образной выемкой, сквозными отверстиями и приталенными пазами, при этом U-образная выемка выполнена соответствующей сечению рукоятки с возможностью фиксации столешницы-держателя к рукоятке, при этом сквозные отверстия и приталенные пазы выполнены по периметру столешницы-держателя с возможностью фиксации навесных инструментальных каналов, при этом размеры сквозных отверстий соответствуют внешнему диаметру навесных инструментальных каналов; при этом элементы заявленного устройства соединены между собой следующим образом: навесные инструментальные каналы закреплены на гибкой рабочей части эндоскопа с помощью ведущей клипсы-держателя, промежуточных клипс-держателей и замыкающей клипсы-держателя, проксимальные концы навесных инструментальных каналов зафиксированы в сквозных отверстиях столешницы-держателя, которая закреплена на рукоятке. Устройство для эндоскопии, состоящее из эндоскопа, не менее одного навесного инструментального канала, клипс-держателей, столешницы-держателя; при этом эндоскоп содержит гибкую рабочую часть с управляемым дистальным концом, содержащую внутри штатные каналы: освещения, передачи изображения, комбинированный подачи воздуха и воды, размещения кинематики; рукоятку с расположенными на ней ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопку подачи воздуха и воды, соединительный кабель; при этом навесные инструментальные каналы выполнены в виде трубок из диэлектрического материала, разрешённого к применению в медицине, инертного, не разрушающегося при дезинфекции, упруго-эластичного, прочного на разрыв, при этом дистальные концы навесных инструментальных каналов выполнены атравматичными – скошенными или закруглёнными, а проксимальные концы выполнены в виде воронки с возможностью введения в навесные инструментальные каналы эндоскопических инструментов и оснащены эластичным клапаном с возможностью предупреждения утечки раздувающего газа, в виде двух встречно размещённых эластичных мембран, причём каждая из мембран одним краем присоединена к краю проксимального конца навесного инструментального канала, а свободные края мембран плотно и внахлёст прилегают друг к другу, заходя одна за другую с возможностью перекрывания просвета навесного инструментального канала и предупреждения утечки раздувающего газа из оперируемой полости, а также с возможностью пропускания эндоскопического инструмента путём охвата его в виде манжеты; по всей длине наружной поверхности каждого навесного инструментального канала монолитно с ним выполнен шип продольный в виде выступа таким образом, что место соединения навесного инструментального канала и шипа продольного выполнено зауженным в виде «талии» с возможностью фиксации навесного инструментального канала в клипсах-держателях; при этом длина навесных инструментальных каналов выполнена не превышающей длину самого длинного из намеченных к применению эндоскопических инструментов; навесные инструментальные каналы зафиксированы на клипсах-держателях по окружности гибкой рабочей части по часовому циферблату с возможностью обеспечения доступа эндоскопического инструмента к участку исследуемого или оперируемого органа; при этом клипсы-держатели содержат ведущую клипсу-держатель, промежуточные клипсы-держатели и замыкающую клипсу-держатель, при этом внешняя поверхность всех клипс-держателей выполнена с продольными пазами с возможностью крепления навесных инструментальных каналов, при этом форма и размеры продольных пазов выполнены по типу замка zip lock с возможностью охвата талии шипа продольного; при этом ведущая клипса-держатель выполнена в виде трубки с возможностью её натяжения на управляемый дистальный конец; конец ведущей клипсы-держателя, обращённый в сторону полости органа, выполнен в виде юбки без продольных пазов, при этом диаметр и длина юбки зависит от пропускной способности анального сфинктера или верхнего пищеводного сфинктера пациента и от вида эндоскопического вмешательства; при этом промежуточные клипсы-держатели выполнены в виде витых пружин в количестве не менее двух, с количеством витков от 1,5 до 3,5, при этом промежуточные клипсы-держатели расположены на гибкой рабочей части на равном удалении друг от друга; при этом замыкающая клипса-держатель выполнена в виде желоба подковообразного сечения с возможностью надёжной фиксации на проксимальном конце гибкой рабочей части вплотную к рукоятке; столешница-держатель выполнена произвольной формы с U-образной выемкой, сквозными отверстиями и приталенными пазами, при этом U-образная выемка выполнена соответствующей сечению рукоятки с возможностью фиксации столешницы-держателя к рукоятке, при этом сквозные отверстия и приталенные пазы выполнены по периметру столешницы-держателя с возможностью фиксации навесных инструментальных каналов, при этом размеры сквозных отверстий соответствуют внешнему диаметру навесных инструментальных каналов; при этом элементы заявленного устройства соединены между собой следующим образом: навесные инструментальные каналы закреплены на гибкой рабочей части эндоскопа с помощью ведущей клипсы-держателя, промежуточных клипс-держателей и замыкающей клипсы-держателя, проксимальные концы навесных инструментальных каналов зафиксированы в сквозных отверстиях столешницы-держателя, которая закреплена на рукоятке. Устройство для эндоскопии по п.1 и по п.2, отличающееся тем, что шип продольный выполнен доходящим до кончика дистального конца и не доходящим до края проксимального конца навесного инструментального канала. Устройство для эндоскопии по п.1 и по п.2, отличающееся тем, что шип продольный выполнен не доходящим до кончика дистального и края проксимального концов навесного инструментального канала. Устройство для эндоскопии по п.1 и по п.2, отличающееся тем, что юбка ведущей клипсы-держателя выполнена с одной циркулярной бороздой по краю внешней поверхности юбки с возможностью фиксации эндоскопического инструмента. Устройство для эндоскопии по п.1 и по п.2, отличающееся тем, что юбка ведущей клипсы-держателя выполнена без циркулярной борозды. Способ использования устройства для эндоскопии по п.1, заключающееся в том, что берут заявленное устройство за рукоятку и вводят в исследуемый или оперируемый полый орган пациента гибкую рабочую часть, оснащённую навесными инструментальными каналами, закреплёнными на клипсах-держателях и столешнице-держателе; для проведения диагностики осматривают и диагностируют обследуемый орган пациента с использованием штатного оснащения эндоскопа и не менее одного навесного инструментального канала, для чего сначала через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем навесной инструментальный канал подсоединяют к аквапуратору для подачи воды под давлением, подают воду и отмывают слизистую оболочку от биологических загрязнений, а через штатный рабочий аспирационно-инструментальный/биопсийный канал проводят аспирацию промывных вод и биологических жидкостей; проводят диагностику и по ее результатам определяют программу лечения; для проведения лечения через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем дистальный конец гибкой рабочей части подводят к месту производства лечебных действий, через навесные инструментальные каналы в количестве не менее одного вводят эндоскопические инструменты, в случае использования двух и более навесных инструментальных каналов их либо используют полностью, либо часть оставляют свободными для резерва, штатный рабочий аспирационно-инструментальный/биопсийный канал либо оставляют свободным для подачи воды и аспирации промывных вод и биологических жидкостей, либо используют для введения эндоскопического инструмента; затем с введёнными эндоскопическими инструментами выполняют лечебные действия; при возникновении потребности отработавший эндоскопический инструмент извлекают из навесных инструментальных каналов и штатного рабочего аспирационно-инструментального/биопсийного канала и вместо него вводят ситуативно необходимый эндоскопический инструмент, не извлекая гибкую рабочую часть из полого органа пациента, взаимоперемещают эндоскопические инструменты между собой, изменяют угол «атаки» эндоскопических инструментов, работают эндоскопическими инструментами одновременно; по завершении лечебных действий из штатного рабочего аспирационно-инструментального/биопсийного канала и навесных инструментальных каналов поочерёдно удаляют эндоскопические инструменты, затем удаляют воздух из внутреннего операционного пространства, после чего удаляют заявленное устройство, завершая медицинское вмешательство. Способ использования устройства для эндоскопии по п.2, заключающееся в том, что берут заявленное устройство за рукоятку и вводят в исследуемый или оперируемый полый орган пациента гибкую рабочую часть, оснащённую навесными инструментальными каналами, закреплёнными на клипсах-держателях и столешнице-держателе; для проведения диагностики осматривают и диагностируют обследуемый орган пациента с использованием штатного оснащения эндоскопа и не менее одного навесного инструментального канала, для чего сначала через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем навесной инструментальный канал подсоединяют к аквапуратору для подачи воды под давлением, подают воду и отмывают слизистую оболочку от биологических загрязнений, затем аквапуратор отсоединяют от навесного инструментального канала и подсоединяют аспиратор, и через навесной инструментальный канал проводят аспирацию промывных вод и биологических жидкостей; проводят диагностику и по результатам диагностики определяют программу лечения; для проведения лечения через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем дистальный конец гибкой рабочей части подводят к месту производства лечебных действий, через навесные инструментальные каналы в количестве не менее одного вводят эндоскопические инструменты, в случае использования двух и более навесных инструментальных каналов их либо используют полностью, либо часть оставляют свободными для резерва, затем с введёнными в навесные инструментальные каналы эндоскопическими инструментами выполняют лечебные действия; при возникновении потребности отработавший эндоскопический инструмент извлекают из навесных инструментальных каналов и вместо него вводят ситуативно необходимый эндоскопический инструмент, не извлекая гибкую рабочую часть из полого органа пациента, взаимоперемещают эндоскопические инструменты между собой, изменяют угол «атаки» эндоскопических инструментов, работают эндоскопическими инструментами одновременно; по завершении лечебных действий из навесных инструментальных каналов поочерёдно удаляют эндоскопические инструменты, затем удаляют воздух из внутреннего операционного пространства, после чего удаляют заявленное устройство, завершая медицинское вмешательство. Способ использования устройства для эндоскопии по любому из пунктов 7, 8, отличающийся тем, что ситуативно необходимый эндоскопический инструмент выбирают по меньшей мере из ряда: биопсийные щипцы, инжектор, электрохирургическая петля, щипцы типа «крысиный зуб», клипатор.
Заявленное техническое решение иллюстрируют Фиг.1 – Фиг.12.
На Фиг. 1 показан внешний вид подготовленного к использованию заявленного устройства для эндоскопии: 1А – по варианту, 1Б – по варианту 2.
На Фиг. 2 показана гибкая рабочая часть эндоскопа по варианту 1.
На Фиг. 3 показана гибкая рабочая часть эндоскопа по варианту 2.
На Фиг. 4 показаны навесные инструментальные каналы (далее по тексту – НИК) с шипом продольным 18 выполненным доходящим до кончика дистального конца 14 НИК (поз. А) и не доходящим до кончика дистального конца 14 НИК (поз. Б и В), а также не доходящими до края проксимального конца 15 НИК, при этом на поз. А, Б дистальные концы 14 НИК выполнены скошенными, на поз. В – закруглёнными.
На Фиг. 5 показан эластичный клапан.
На Фиг. 6 показано поперечное сечение НИК.
На Фиг. 7 показаны разновидности ведущей клипсы-держателя КД: 7А – без циркулярной борозды, 7Б – с циркулярной бороздой).
На Фиг. 8 показана промежуточная клипса-держатель КД в рабочем состоянии.
На Фиг. 9 показана промежуточная клипса-держатель КД в нерабочем (развёрнутом) состоянии.
На Фиг. 10 показана замыкающая КД.
На Фиг. 11 показан охват талии шипа продольного продольными пазами по типу замка zip lock.
На Фиг. 12 показана столешница-держатель в форме окружности и треугольной формы.
Позиции на Фиг.1 - Фиг.12 обозначают:
1 - навесные инструментальные каналы (далее НИК),
2 - ведущая клипса-держатель КД,
3 - промежуточные клипсы -держатели КД,
4 - замыкающая клипса-держатель КД,
5 - столешница-держатель,
6 - гибкая рабочая часть,
7 - управляемый дистальный конец гибкой рабочей части,
8 - штатный рабочий аспирационно-инструментальный/биопсийный канал (далее - штатный рабочий канал),
8а - отверстие входное штатного рабочего аспирационно-инструментального/биопсийного канала,
8б - отверстие выходное штатного рабочего аспирационно-инструментального/биопсийного канала,
9 - форсунка штатного канала подачи воздуха и воды,
10 - линзы штатных каналов передачи освещения,
11 - линза штатного канала передачи изображения,
12 - рукоятка,
13 - соединительный кабель с разъемом осветителя,
14 - дистальный конец НИК,
15 - проксимальный конец НИК,
16 - эластичный клапан,
16.1 и 16.2 - мембраны,
17 - эндоскопический инструмент,
18 - шип продольный,
19 - талия шипа продольного (далее - талия),
20 - продольные пазы КД,
21 - юбка,
22 - циркуляционная борозда,
23 - U-образная выемка столешницы-держателя,
24 - сквозные отверстия,
25 - приталенные пазы.
Далее заявителем приведено описание заявленного технического решения с примерами конкретного выполнения.
Заявленный технический результат достигают разработкой заявленного устройства для эндоскопии (варианты) и способа его использования.
Выявленные конструктивные и функциональные недостатки прототипа заявитель устраняет размещением (поверх эластичной герметичной оболочки) по всей длине гибкой рабочей части 6 эндоскопа навесных инструментальных каналов (НИК) 1, дополнительных к штатному рабочему каналу 8 (Фиг.1, Фиг.2). НИК 1 обеспечивают оснащение эндоскопа большим, по сравнению с аналогами, количеством эндоскопических инструментов 17 с целью достижения заявленного технического результата.
Далее заявителем приведено описание заявленного устройства.
Заявленное устройство для эндоскопии включает (Фиг. 1):
- эндоскоп (на Фиг. позицией не обозначен) (по варианту 1 и по варианту 2),
- не менее одного навесного инструментального канала НИК 1;
- клипсы-держатели КД, включающие ведущую КД 2, промежуточные КД 3 и замыкающую КД 4;
- столешницу-держатель 5.
Далее заявителем приведено подробное описание составных частей заявленного устройства.
Варианты 1 и 2 заявленного устройства отличаются конструкцией эндоскопа.
Эндоскоп по варианту 1 (Фиг.1А).
Эндоскоп по варианту 1 содержит: гибкую рабочую часть 6 (Фиг.2) с управляемым дистальным концом 7, содержащую внутри штатные каналы (на Фиг. позициями не указаны): освещения, передачи изображения, комбинированный подачи воздуха и воды, размещения кинематики, а также штатный рабочий канал 8, при этом каналы освещения и передачи изображения заканчиваются на торце управляемого дистального конца гибкой рабочей части линзами 10 и 11, штатный рабочий канал выходным отверстием 8б, комбинированный канал подачи воздуха и воды - форсункой 9, при этом выходное отверстие 8б рабочего канала расположено, например, на 7-ми часах по часовому циферблату (если смотреть на него зеркально); рукоятку 12 с расположенными на ней ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопку управления аспирацией, кнопку подачи воздуха и воды (на Фиг. позициями не указаны), отверстие входное 8а в штатный рабочий канал 8, механизмы привода управляемого дистального конца гибкой рабочей части, расположенные внутри рукоятки; соединительный кабель 13 для соединения эндоскопа с внешним источником света, помпой для подачи воздуха и воды, и аспиратором (на Фиг. позициями не указаны); эндоскоп покрыт эластичной герметичной оболочкой.
Эндоскоп по варианту 2 (Фиг.1Б).
Эндоскоп по варианту 2 содержит: гибкую рабочую часть 6 (Фиг.3) с управляемым дистальным концом 7, содержащую внутри штатные каналы (на Фиг. позициями не указаны): освещения, передачи изображения, комбинированный подачи воздуха и воды, размещения кинематики, при этом каналы освещения и передачи изображения заканчиваются на торце управляемого дистального конца гибкой рабочей части линзами 10 и 11, комбинированный форсункой 9; рукоятку 12 с расположенными на ней ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопку управления аспирацией, кнопку подачи воздуха и воды, механизмы привода управляемого дистального конца гибкой рабочей части, расположенные внутри рукоятки; соединительный кабель 13 для соединения эндоскопа с внешним источником света, помпой для подачи воздуха и воды, и аспиратором (на Фиг. позициями не указаны); эндоскоп покрыт эластичной герметичной оболочкой.
Заявитель поясняет, что отличием эндоскопов по вариантам 1 и 2 является количество штатных рабочих каналов в гибкой рабочей части 6: в варианте 2 штатный рабочий канал 8 отсутствует (Фиг.3), за счет чего гибкая рабочая часть 6 имеет меньший диаметр поперечного сечения, что облегчает доступ в полые органы пациента и снижает травмоопасность. При этом эндоскопические инструменты 17 в варианте 1 вводят через штатный рабочий канал 8 и навесные инструментальные каналы 1, в варианте 2 вводят только через навесные инструментальные каналы 1, что в обоих вариантах способствует достижению заявленного технического результата.
Варианты 1 и 2 являются альтернативными вариантами по назначению и достигаемому техническому результату и расширяют арсенал средств указанного назначения.
Навесные инструментальные каналы НИК 1.
НИК 1 (Фиг. 4) выполнены в виде трубок из диэлектрического материала, разрешенного к применению в медицине, инертного, не разрушающегося при дезинфекции высокого уровня, упруго-эластичного (сминаемого под нагрузкой и восстанавливающего форму после снятия нагрузки), с низким коэффициентом трения скольжения между внутренними стенками НИК и материалом эндоскопических инструментов, высокопрочного на разрыв, например - силикона или силиконовой резины [https://arthouse96.ru/informatsiya/stati_o_produktsii/vyibiraem_tverdost _silikona],
[http://elmica.ru/nashaprodukciya /rezinotehnicheskieizda/ silikonovaya-rezina-plastiny-shnury-trubki.html].
При этом дистальные концы 14 НИК 1 выполнены атравматичными - скошенными (Фиг.4, поз. А, Б) или закругленными (Фиг.4, поз. В), а проксимальные концы 15 выполнены в виде воронки с возможностью обеспечения удобного введения в НИК эндоскопических инструментов и оснащены эластичным клапаном 16 (Фиг.5), предупреждающим утечку раздувающего газа, в виде двух встречно размещенных эластичных мембран 16.1 и 16.2, причем каждая из мембран одним краем присоединена к краю проксимального конца 15, например, приклеиванием, а свободные края мембран 16.1 и 16.2 плотно и внахлест прилегают друг к другу, заходя одна за другую с возможностью перекрывания просвета НИК 1 и предупреждения утечки раздувающего газа из оперируемой полости, а также с возможностью пропускания эндоскопического инструмента 17 (Фиг.1) путем охвата его в виде манжеты.
Заявитель поясняет, что:
- выполнение дистальных концов 14 НИК 1 скошенными (Фиг.4, поз. А, Б) позволяет выполнять безопасное введение управляемого дистального конца 7 гибкой рабочей части 6 с фиксированными на нем КД и НИК, например, через ВПС в пищевод и желудок. При этом фиксация нескольких НИКов по периметру ведущей КД придает управляемому дистальному концу 7 гибкой рабочей части обтекаемую клинообразную (конусовидную) форму, постепенно увеличивающуюся по диаметру в направлении от юбки 21 к гибкой рабочей части 6 (Фиг.2, Фиг.3), что позволяет с учетом сминаемости НИК преодолеть тонус и небольшой диаметр раскрытия ВПС и безопасно пройти в просвет пищевода, плавно и равномерно раздвинув мышцы ВПС по всему периметру;
- выполнение дистальных концов 14 НИК 1 закругленными (Фиг.4, поз. В) позволяет выполнять безопасное введение гибкой рабочей части 6 с фиксированными на нем КД и НИК, например, через анальный канал в прямую кишку. При этом фиксация нескольких НИКов по периметру ведущей КД придает управляемому дистальному концу 7 гибкой рабочей части обтекаемую форму (Фиг.2, Фиг.3), что позволяет с учетом сминаемости НИК преодолеть тонус анального сфинктера и безопасно пройти в просвет прямой кишки, плавно и равномерно раздвинув мышцы анального сфинктера по всему периметру.
По всей длине наружной поверхности каждого НИКа 1 монолитно с ним выполнен шип продольный 18 (Фиг. 4, 5, 6) в виде выступа таким образом, что место соединения НИК 1 и шипа продольного 18 выполнено зауженным в виде «талии» 19 с возможностью надежной фиксации НИК 1 в клипсах-держателях 2, 3, 4.
В частном случае выполнения шип продольный 18 изготовлен доходящим до кончика дистального конца 14 и не доходящим до края проксимального конца 15 НИК (Фиг.4, позиция А). Такое исполнение шипа продольного 18 не позволяет дистальному концу 14 НИК (Фиг.4, поз. А) выйти на юбку 21 ведущей КД 2 при монтаже устройства на управляемом дистальном конце 7 гибкой рабочей части 6 (Фиг.2, Фиг.3, Фиг.7А, 7Б), тем самым достигается постепенное увеличение внешнего диаметра управляемого дистального конца 7 от юбки к гибкой рабочей части 6.
В другом частном случае выполнения шип продольный 18 изготовлен не доходящим до кончика дистального и края проксимального концов НИК (Фиг.4, поз. Б и В). Такое исполнение шипа продольного 18 позволяет дистальному концу 14 НИК (Фиг.4, поз. А) выйти на длину юбки 21 ведущей КД 2 и за ее пределы, при монтаже устройства на управляемом дистальном конце 7 гибкой рабочей части 6 (Фиг.2, Фиг.3, Фиг.7А, 7Б), тем самым достигается визуализация за выходящими из НИК инструментами, наблюдение и контроль за их траекторией движения.
Длину НИК 1 выполняют не превышающей длину самого длинного из намеченных к применению гибких эндоскопических инструментов 17.
НИК зафиксированы на КД 2, 3, 4 по окружности гибкой рабочей части 6 (по часовому циферблату) (Фиг.1, Фиг. 2, Фиг. 3) с возможностью обеспечения доступа эндоскопического инструмента 17 к любому участку исследуемого или оперируемого органа.
Количество НИК 1 зависит от вида и цели эндоскопического вмешательства, но не менее одного по варианту 1 и не менее одного по варианту 2.
Клипсы-держатели (КД) навесных инструментальных каналов НИК.
Клипсы-держатели (КД) включают ведущую КД 2 (Фиг. 7), промежуточные КД 3 (Фиг. 8, 9) и замыкающую КД 4 (Фиг. 10), при этом внешняя поверхность всех КД выполнена с продольными пазами 20 с возможностью крепления НИК 1, при этом форма и размеры продольных пазов 20 выполнены по типу замка zip lock с возможностью охвата талии 19 шипа продольного 18 (Фиг. 11).
Ведущая КД 2 выполнена в виде трубки с возможностью ее натяжения на управляемый дистальный конец 7. Конец ведущей КД 2, обращенный в сторону полости органа, выполнен в виде юбки 21 без продольных пазов 20, при этом диаметр и длина юбки 21 зависит от пропускной способности сфинктерного аппарата пациента и от вида эндоскопического вмешательства.
В одном частном случае юбка 21 ведущей КД 2 выполнена с одной циркулярной бороздой 22 по краю внешней поверхности юбки с возможностью фиксации эндоскопического инструмента (Фиг.7Б).
В другом частном случае юбка 21 ведущей КД 2 выполнена без циркулярной борозды 22 (Фиг. 7А).
Промежуточные КД 3 выполнены в виде витых пружин в количестве не менее двух (Фиг. 8, Фиг. 9), с количеством витков от 1,5 до 3,5. При этом промежуточные КД 3 расположены на гибкой рабочей части 6 на равном удалении друг от друга (Фиг. 1, Фиг. 2, Фиг. 3).
Замыкающая КД 4 (Фиг. 10) выполнена в виде желоба подковообразного сечения с возможностью надежной фиксации сочленением на проксимальном конце 15 гибкой рабочей части 6 вплотную к рукоятке 12 (Фиг. 1, Фиг. 2, Фиг. 3).
Столешница-держатель 5 (Фиг.1, Фиг. 2, Фиг. 3, Фиг. 12) выполнена произвольной формы (например, в форме окружности, треугольной формы, звездчатой формы и др.) с U-образной выемкой 23, сквозными отверстиями 24 и приталенными пазами 25. При этом U-образная выемка 23 выполнена соответствующей сечению рукоятки 12 с возможностью фиксации столешницы-держателя 5 к рукоятке 12 сочленением. При этом сквозные отверстия 24 и приталенные пазы 25 выполнены по периметру столешницы-держателя 5 с возможностью фиксации НИК 1 сочленением, при этом размеры сквозныx отверстий 24 соответствуют внешнему диаметру НИК 1.
При этом элементы заявленного устройства соединены между собой следующим образом (Фиг. 1, Фиг.2): навесные инструментальные каналы 1 закреплены на гибкой рабочей части 6 эндоскопа с помощью ведущей КД 2, промежуточных КД 3 и замыкающей КД 4, проксимальные концы 15 НИК 1 зафиксированы в сквозных отверстиях 24 столешницы-держателя 5, которая закреплена на рукоятке 12. Все элементы соединены, например, сочленением.
Далее заявителем приведено описание сборки заявленного устройства.
Изготавливают НИКи, клипсы-держатели КД и столешницу в соответствии с описанной выше конструкцией, например, методом литья из разрешенного к применению в медицине инертного, не разрушающегося при дезинфекции высокого уровня, упруго-эластичного (сминаемого под нагрузкой и восстанавливающего форму после снятия нагрузки), с низким коэффициентом трения скольжения между внутренними стенками навесных инструментальных каналов (НИК) и материалом эндоскопических инструментов, высокопрочного на разрыв диэлектрического материала, например - силикона или силиконовой резины [https://arthouse96.ru/informatsiya/stati_o_produktsii/ vyibiraem_tverdost_silikona] и [http://elmica.ru/nashaprodukciya/rezinotehnicheskieizda/ silikonovaya-rezina-plastiny-shnury-trubki.html].
Берут эндоскоп, выполненный по варианту 1 или по варианту 2, фиксируют на рукоятке 12 (Фиг. 1, Фиг. 2, Фиг. 3) столешницу-держатель 5 с использованием U-образной выемки 23 (Фиг. 12), например - сочленением. При этом столешницу-держатель 5 берут с количеством и размерами сквозных отверстий 24, соответствующих количеству и размерам НИК 1.
Далее управляемый дистальный конец 7 гибкой рабочей части 6 соединяют с ведущей КД 2, например - натягиванием КД 2 на управляемый дистальный конец 7 с использованием эластичности материала КД (Фиг. 1, Фиг. 2, Фиг. 3) .
Затем на гибкой рабочей части 6 вплотную к рукоятке 12 фиксируют замыкающую клипсу-держатель 4 (Фиг. 1, Фиг. 2, Фиг. 3) путем охвата клипсой-держателем 4 гибкой рабочей части 6.
Затем фиксируют не менее двух промежуточных клипс-держателей 3 (Фиг. 1, Фиг. 2, Фиг. 3) на гибкой рабочей части 6 на равном расстоянии друг от друга путем обвивания витками спирали КД 3 гибкой рабочей части 6, используя эластичность материала КД. Количество промежуточных КД 3 и расстояние между ними зависит от цели эндоскопического вмешательства.
Затем ориентируют продольные пазы 20 сначала у замыкающей КД 4, затем у промежуточных КД 3, затем у ведущей КД 2, например - проворачивая КД вокруг гибкой рабочей части 6 таким образом, чтобы продольные пазы 20 всех КД были выстроены в одну линию как продолжение друг друга и совпадали между собой и были сориентированы со сквозными отверстиями столешницы-держателя 5 в одной проекции (Фиг. 1, Фиг. 2, Фиг. 3).
Далее берут НИК и располагают их таким образом, чтобы дистальные концы 14 располагались рядом с ведущей КД 2 (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4), а проксимальные концы 15 НИК располагались у столешницы-держателя 5. Далее фиксируют НИК, начиная с их дистального конца 14, на КД 2, КД 3, КД 4, соединяя продольные пазы 20 клипс-держателей и шипы продольные 18 НИК. При этом шипы 18 подводят к продольным пазам 20 (Фиг. 11) и нажимом пальцев рук вдавливают шипы в продольные пазы 20, начиная от ведущей КД 2 на управляемом дистальном конце 7, затем последовательно в промежуточные КД 3 на гибкой рабочей части 6, двигаясь в направлении к рукоятке 12, и заканчивают замыкающей КД 4, тем самым плотно пристегивают НИК по всей длине гибкой рабочей части 6 ко всем КД по типу замка zip lock. После этого фиксируют проксимальные концы 15 НИК в сквозных отверстиях 24 столешницы-держателя 5 путем сочленения через приталенные пазы 25, используя эластичность материала.
Далее заявителем приведено описание заявленного способа работы заявленного устройства (варианты) в целом.
Берут заявленное устройство, выполненное по варианту 1 или по варианту 2, собранное по описанному выше алгоритму.
Пациента укладывают на операционный стол, берут заявленное устройство за рукоятку 12 и вводят в исследуемый или оперируемый полый орган пациента гибкую рабочую часть 6, оснащенную НИКами 1, закрепленными на КД 2, КД 3, КД 4 и столешнице-держателе 5.
При этом благодаря изготовлению НИК из упруго-эластичного материала со стенками толщиной в десятые доли миллиметра и низким коэффициентом трения, НИК сминаются при прохождении сфинктерного аппарата и благодаря обтекаемой конфигурации дистальных концов и клипс-держателей не вызывают затруднений для ввода гибкой рабочей части 6 в исследуемую или оперируемую полость внутренних органов, например, через ВПС в пищевод и желудок. В смятом состоянии НИКи незначительно увеличивают наружный диаметр гибкой рабочей части 6, что создает несущественное, в сравнении с аналогами, сопротивление при ее вводе через сфинктерный аппарат пациента, которое преодолевается благодаря растяжимости биологических тканей. Сочетание упругой эластичности и сминаемости НИК с растяжимостью биологических тканей способствует уменьшению, по сравнению с аналогами, болезненности и травматичности процесса ввода гибкой рабочей части 6 в исследуемый или оперируемый полый орган, что одновременно облегчает работу оператора при диагностике и последующих лечебных манипуляциях.
Для проведения диагностики осматривают и диагностируют обследуемый орган с использованием штатного оснащения эндоскопа и не менее одного навесного инструментального канала, для чего:
- по варианту 1 сначала через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК подсоединяют, например, к аквапуратору для подачи воды под давлением, подают воду и отмывают слизистую оболочку от биологических загрязнений, а через штатный рабочий канал 8 проводят аспирацию промывных вод и биологических жидкостей. Проводят диагностику и по результатам диагностики определяют программу лечения;
- по варианту 2 сначала через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК подсоединяют к аквапуратору для подачи воды под давлением, подают воду и отмывают слизистую оболочку от биологических загрязнений, затем аквапуратор отсоединяют от НИК и подсоединяют аспиратор, и через НИК проводят аспирацию промывных вод и биологических жидкостей. Проводят диагностику и по результатам диагностики определяют программу лечения.
Для проведения лечения через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем:
- по варианту 1 дистальный конец 7 гибкой рабочей части 6 подводят к месту производства лечебных действий, через НИК 1 в количестве не менее одного вводят эндоскопические инструменты, в случае использования двух и более НИК часть НИК оставляют свободными (резерв), например - для изменения угла «атаки» или ввода других инструментов по мере надобности, штатный рабочий канал 8 оставляют свободным, например, для подачи воды и аспирации промывных вод и биологических жидкостей, или для введения эндоскопического инструмента. Затем с введенными в НИКи 1 и штатный рабочий канал 8 инструментами выполняют лечебные действия;
- по варианту 2 дистальный конец 7 гибкой рабочей части 6 подводят к месту производства лечебных действий, через НИК 1 в количестве не менее одного вводят эндоскопические инструменты, в случае использования два и более НИК часть НИК оставляют свободными (резерв), например - для подачи воды и аспирации промывных вод и биологических жидкостей, или для изменения угла «атаки» или введения других эндоскопических инструментов по мере надобности. Затем с введенными в НИКи 1 эндоскопическими инструментами выполняют лечебные действия.
При возникновении потребности, отработавший эндоскопический инструмент извлекают из НИК и вместо него вводят ситуативно необходимый эндоскопический инструмент, не извлекая гибкую рабочую часть 6 из полого органа, взаимоперемещают эндоскопические инструменты между собой, изменяют угол «атаки» инструментов, работают несколькими эндоскопическими инструментами одновременно.
По завершении лечебных действий из НИК 1 поочередно удаляют эндоскопические инструменты, затем удаляют воздух из внутреннего операционного пространства, после чего удаляют заявленное устройство, завершая медицинское вмешательство.
Далее заявителем приведены примеры осуществления заявленного технического решения.
Приведенные примеры иллюстрируют заявленное техническое решение, но не ограничивают объем патентных притязаний.
Для проведения экспериментов по примерам 1 - 6 использованы туши забитых свиней массой 70 - 80 кг, полученных в подсобном хозяйстве. Эксперименты проведены сразу после забоя свиней в течение 1 часа.
ПРИМЕР 1 по варианту 1. Проведение эндоскопического диагностического исследования и лечебного вмешательства на полом органе верхнего отдела ЖКТ, например, желудке, с заявленным устройством с одним НИК и эндоскопом по варианту 1 с одним штатным рабочим каналом (Фиг. 1А, Фиг. 2).
Берут заявленное устройство по варианту 1, собранное по описанному выше алгоритму.
При выборе количества НИК, разновидности их дистального конца 14, вариантов исполнения шипа продольного 18 (Фиг. 4, поз. А, поз. Б, поз. В), количества КД и их расположения на гибкой рабочей части эндоскопа учитывали особенности строения верхнего отдела ЖКТ, например, небольшой диаметр раскрытия ВПС, а также цель эндоскопического вмешательства.
По примеру 1 для взятия биопсии:
- на эндоскопе с помощью КД зафиксировали, например, один НИК на 5-ти часах по часовому циферблату, таким образом, что скошенный дистальный конец НИК (Фиг.4, поз. А) не выходит на юбку 21 ведущей КД 2 (Фиг.7);
- дистальный конец 14 НИК 1 выполнен скошенным (Фиг.4, поз. А);
- шип продольный 18 на НИК выполнен доходящим до кончика дистального скошенного конца и не доходящим до края проксимального конца НИК (Фиг.4, поз. А);
- конец ведущей КД 2, обращенный в сторону полости органа, выполнен в виде юбки 21 без продольных пазов и без циркулярной борозды 22 (Фиг.7А);
- промежуточные КД 3 выполнены в виде двух витых пружин с 1,5 витками вокруг гибкой рабочей части эндоскопа 6 (Фиг.8, Фиг.9);
- столешница-держатель 5 выполнена в форме окружности (Фиг.12).
Тушу свиньи уложили на манипуляционный стол, развели пасть свиньи, зафиксировали пасть в открытом состоянии, взяли заявленное устройство за рукоятку 12, и затем последовательно - вначале в глотку, потом в пищевод и в желудок ввели гибкую рабочую часть 6, оснащенную одним НИКом 1 на 5-ти (пяти) часах по циферблату, закрепленным на ведущей КД 2, на двух промежуточных КД 3, замыкающей КД 4 и столешнице-держателе 5. Введение гибкой рабочей части 6, оснащенной ведущей КД 2, двумя промежуточными КД 3, одной замыкающей КД 4 и одним НИКом 1 прошло беспрепятственно вследствие обтекаемости клиновидной формы управляемого дистального конца 7 гибкой рабочей части вместе с КД 2 и сминаемости НИК при прохождении верхнего пищеводного сфинктера.
Для имитации диагностической биопсии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК 1 подсоединили к аквапуратору и в полость органа подали струю воды под давлением, отмыли слизистую оболочку от слизи и остатков пищи, через штатный рабочий канал 8 выполнили аспирацию промывных жидкостей, осмотрели слизистую оболочку. Условно определили необходимость проведения биопсии слизистой оболочки. Для имитации проведения биопсии слизистой оболочки через НИК1 ввели биопсийные щипцы и отщипнули кусочек слизистой с последующим его извлечением.
Введение и выведение эндоскопического инструмента из просвета органа прошло беспрепятственно. В процессе диагностики спадания исследуемой полости не наблюдалось.
Для имитации проведения полипэктомии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, управляемый дистальный конец 7 гибкой рабочей части 6 подвели к месту условной полипэктомии желудка, через штатный рабочий канал 8 эндоскопа ввели инжектор, подкололись в подслизистый слой желудка, ввели необходимое количество физраствора для создания инфильтрационной «подушки» - условного полипа, после этого инжектор удалили.
Через НИК1 в просвет органа ввели электрохирургическую петлю, раскрыли и накинули на условный полип. Для радикальности резекции условного полипа через штатный рабочий канал 8 ввели второй инструмент - щипцы, ухватили условный полип за верхушку и подтянули к торцу эндоскопа таким образом, чтобы электрохирургическая петля опустилась ближе к желудочной стенке и охватила собой условный полип и его псевдоножку. После этого петлю затянули на псевдоножке условного полипа и подали на петлю электрический ток, условный полип срезали, на месте резекции образовалась раневая поверхность с оголенным подслизистым слоем, удаленный условный полип фрагментировали петлей, затем щипцами, введенными через штатный рабочий канал 8, фрагменты условного полипа извлекли наружу, электрохирургическую петлю извлекли из НИК 1, затем к НИК1 подсоединили аквапуратор. В полость органа на раневую поверхность подали струю воды под давлением, выполнили промывание раневой поверхности, промывную жидкость одновременно аспирировали через штатный рабочий канал 8. Затем оценили расположение раневой поверхности в операционном пространстве на экране монитора. Раневая поверхность расположилась на 7-ми часах по циферблату на передней стенке нижней трети тела желудка ближе к большой кривизне. После этого выбрали оптимальный угол «атаки» для подведения щипцов типа «крысиный зуб» с целью сведения краев раны. В данном случае НИК, расположенный на 5-ти часах по циферблату (на контрлатеральной стороне от раны) оказался наиболее оптимальным для захвата и сведения краев раны. Для этого от НИК на 5-ти часах по циферблату отсоединили аквапуратор, ввели щипцы типа «крысиный зуб», ухватили и свели края раны. Через штатный рабочий канал 8 ввели клипатор с клипсой и фиксировали края раны между собой. Для полного закрытия раны потребовалось наложить вторую клипсу с контрлатеральной стороны - под другим углом «атаки». Для этого из НИК, расположенного на 5-ти часах по циферблату, удалили щипцы типа «крысиный зуб». Затем в него завели клипатор и полностью заклипировали края раны, наложив вторую клипсу. При этом клипатор беспрепятственно извлекали для перезарядки клипс, и меняли его местоположение и угол «атаки», не меняя при этом позицию управляемого дистального конца 7 гибкой рабочей части 6 эндоскопа.
По завершении условных лечебно-диагностических действий из НИК 1 и из штатного рабочего канала 8 удалили эндоскопические инструменты 17 (Фиг. 1), затем через штатный рабочий канал 8 аспирировали воздух из внутреннего операционного пространства, после чего удалили заявленное устройство и завершили условное медицинское вмешательство.
Все манипуляции, начиная от диагностики и заканчивая лечебным вмешательством, выполняли без извлечения эндоскопа из туши свиньи и не меняя позицию его управляемого дистального конца 7 гибкой рабочей части по отношению к условно патологическому образованию и к раневой поверхности. Введение и выведение эндоскопического инструмента через НИК прошло беспрепятственно. В процессе операции спадания внутреннего операционного пространства не наблюдалось. Наличие многоканальности эндоскопа способствовало одновременному использованию min двух инструментов (электрохирургической петли и щипцов, клипатора и щипцов типа «крысиный зуб»), ротации инструментов с изменением их угла «атаки», и оптимизировало доступ инструментами к тяжело доступным участкам операционного поля, а также способствовало раздельному подключению аквапуратора и аспиратора (каждого в свой канал), предоставив возможность одновременного их использования при отмывании раневого дефекта.
ПРИМЕР 2 по варианту 1. Проведение эндоскопического диагностического исследования и лечебного вмешательства на полом органе верхнего отдела ЖКТ, например, желудке, с заявленным устройством с тремя НИК и эндоскопом по варианту 1 с одним штатным рабочим каналом (Фиг. 1А, Фиг. 2).
Берут заявленное устройство по варианту 1, собранное по описанному выше алгоритму.
На выбор разновидности НИК (форму дистального конца 14, вариантов исполнения шипа продольного 18 (Фиг. 4, поз. А, поз. Б, поз. В), количества НИК и количества КД, их расположения на гибкой рабочей части эндоскопа оказывают особенности строения верхнего отдела ЖКТ, например, небольшой диаметр раскрытия ВПС, а также цель эндоскопического вмешательства.
По примеру 2 для взятия биопсии:
- на эндоскопе с помощью КД зафиксировали, например, три НИКа по нижне-правой полуокружности гибкой рабочей части на 3-х, 5-ти и 8-ми часах по часовому циферблату, таким образом, что скошенные дистальные концы всех НИК (Фиг. 4, поз. Б) выходят на юбку 21 ведущей КД 2 (Фиг. 7) и плотно примыкают к ее поверхности;
- дистальные концы 14 НИК 1 выполнены скошенными (Фиг. 4, поз. Б);
- шип продольный 18 на НИК выполнен не доходящими до кончика дистального скошенного конца и не доходящим до края проксимального конца НИК (Фиг. 4, поз. Б);
- конец ведущей КД 2, обращенный в сторону полости органа, выполнен в виде юбки 21 без продольных пазов, с циркулярной бороздой 22 по краю внешней поверхности (Фиг. 7Б);
- НИК, расположенный на 5-ти часах по циферблату предварительно оснастили электрохирургической петлей. Петлю раскрыли и зафиксировали на циркулярной борозде 22 юбки 21 ведущей КД 2, путем затягивания петли, таким образом, чтобы последняя полностью погрузилась в циркулярную борозду 21.
- промежуточные КД 3 выполнены в виде трех витых пружин с 2,5 витками вокруг гибкой рабочей части эндоскопа 6 (Фиг. 8, Фиг. 9);
- столешница-держатель 5 выполнена в форме треугольника (Фиг. 12).
Тушу свиньи уложили на манипуляционный стол, взяли заявленное устройство за рукоятку 12, развели пасть свиньи, зафиксировали пасть в открытом состоянии, и затем последовательно - вначале в глотку, потом в пищевод и в желудок ввели гибкую рабочую часть 6, оснащенную тремя НИКами 1, закрепленными на КД 2, КД 3, КД 4, и столешнице-держателе 5, и одним инструментом в НИК.
Проведение гибкой рабочей части 6, оснащенной ведущей КД 2, тремя промежуточными КД 3, одной замыкающей КД 4, тремя НИКами 1 и с одним инструментом в НИК, через ВПС прошло беспрепятственно, вследствие расположения всех НИК в пределах одной полуокружности, обтекаемости клиновидной формы управляемого дистального конца 7 гибкой рабочей части вместе с КД 2 и сминаемости двух свободных НИК.
Для имитации диагностической биопсии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК 1, расположенный на 3-х часах по циферблату, подсоединили к аквапуратору и в полость органа подали струю воды под давлением, отмыли слизистую оболочку от слизи и остатков пищи, через штатный рабочий канал 8 выполнили одновременную аспирацию промывных жидкостей, осмотрели слизистую оболочку. Условно определили необходимость проведения биопсии слизистой оболочки. Для имитации проведения биопсии слизистой оболочки через НИК 1, расположенный на 8-ми часах по циферблату, ввели биопсийные щипцы и отщипнули кусочек слизистой с последующим его извлечением.
Введение и выведение эндоскопического инструмента из просвета органа прошло беспрепятственно. В процессе диагностики спадания исследуемой полости не наблюдалось.
Для имитации проведения полипэктомии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, управляемый дистальный конец 7 гибкой рабочей части 6 подвели к месту условной полипэктомии, через НИК на 8-ми часах по циферблату, ввели инжектор, инжектором подкололись в подслизистый слой желудка, ввели необходимое количество физраствора для создания инфильтрационной «подушки»- условного полипа, после этого инжектор удалили.
Для радикальности резекции в штатный рабочий канал 8 ввели биопсийные щипцы, ухватили условный полип за верхушку и подтянули его к торцу гибкой рабочей части, освободили электрохирургическую петлю, расположенную в НИК на 5-ти часах по циферблату, из циркулярной борозды 22 юбки 21 ведущей клипсы 2, и скользя петлей по биопсийным щипцам, как по направляющей, подвели петлю к условному полипу, продолжая удерживать условный полип щипцами, накинули на него электрохирургическую петлю таким образом, чтобы электрохирургическая петля опустилась ближе к желудочной стенке и охватила собой условный полип и его псевдоножку. После этого петлю затянули на псевдоножке условного полипа и подали на петлю электрический ток, условный полип срезали, на месте резекции образовалась раневая поверхность с оголенным подслизистым слоем, удаленный условный полип фрагментировали петлей, затем щипцами, введенными через штатный рабочий канал 8, фрагменты условного полипа извлекли наружу, щипцы удалили, электрохирургическую петлю извлекли из НИК. Затем к НИК1 на 3-х часах подсоединили аквапуратор, в полость органа на раневую поверхность подали струю воды под давлением, выполнили промывание раневой поверхности, промывную жидкость аспирировали через штатный рабочий канал 8. Затем оценили расположение раневой поверхности в операционном пространстве на экране монитора. Раневая поверхность расположилась на 7-ми часах по циферблату на передней стенке нижней трети тела желудка ближе к большой кривизне. После этого выбрали оптимальный угол «атаки» для подведения щипцов типа «крысиный зуб» для сведения краев раны. В данном случае НИК, расположенный на 3-х часах по циферблату (на контрлатеральной стороне от раны) оказался наиболее оптимальным для захвата и сведения краев раны.
Для этого от НИК на 3-х часах по циферблату отсоединили аквапуратор, ввели щипцы типа «крысиный зуб», ухватили и свели края раны. Через НИК, расположенный на 5-ти часах по циферблату ввели клипатор с клипсой и фиксировали края раны между собой. Для полного закрытия раны потребовалось наложить вторую клипсу также с контрлатеральной стороны, но под другим углом «атаки». Для этого из НИК, расположенного на 3-х часах по циферблату, удалили щипцы типа «крысиный зуб». Затем в него завели клипатор и полностью заклипировали края раны, наложив вторую клипсу. При этом клипатор дважды беспрепятственно извлекали для перезарядки клипс, и меняли его местоположение и угол «атаки» не меняя позицию управляемого дистального конца 7 гибкой рабочей части 6 эндоскопа.
По завершении условных лечебно-диагностических действий из НИК 1 удалили эндоскопические инструменты 17 (Фиг. 1), затем через штатный рабочий канал 8 аспирировали воздух из внутреннего операционного пространства, после чего удалили заявленное устройство и завершили условное медицинское вмешательство.
Все манипуляции, начиная от диагностики и заканчивая лечебным вмешательством, выполняли без извлечения эндоскопа из туши свиньи и не меняя позицию его управляемого дистального конца 7 гибкой рабочей части по отношению к условно патологическому образованию и к раневой поверхности. Введение и выведение эндоскопического инструмента через НИКи прошло беспрепятственно. В процессе операции спадания внутреннего операционного пространства не наблюдалось. Наличие многоканальности эндоскопа способствовало одновременному использованию min двух инструментов (электрохирургической петли и щипцов, клипатора и щипцов типа «крысиный зуб»), ротации инструментов с изменением их угла «атаки», и оптимизировало доступ инструментами к тяжело доступным участкам операционного поля, а также способствовало раздельному подключению аквапуратора и аспиратора (каждого в свой канал), предоставив возможность одновременного их использования при отмывании раневого дефекта.
ПРИМЕР 3 по варианту 1. Проведение эндоскопического диагностического исследования и лечебного вмешательства на полом органе нижнего отдела ЖКТ, например, прямой кишке, с заявленным устройством с пятью НИК и эндоскопом по варианту 1 с одним штатным рабочим каналом (Фиг. 1А, Фиг. 2).
Берут заявленное устройство по варианту 1, собранное по описанному выше алгоритму.
На выбор разновидности НИК (форму дистального конца 14, вариантов исполнения шипа продольного 18 (Фиг. 4, поз А, поз. Б, поз. В), количества НИК и количества КД, их расположения на гибкой рабочей части эндоскопа оказывают особенности строения нижнего отдела ЖКТ, например, большего раскрытия анального сфинктера, а также цель эндоскопического вмешательства.
По примеру 3 для взятия биопсии:
- на эндоскопе с помощью КД фиксируют, например, пять НИК по всей окружности гибкой рабочей части на 3-х, 5-ти, 8-ми, 9-ти и 12-ти часах по часовому циферблату, таким образом, что дистальные концы всех НИК (Фиг. 4, поз. В) выходят на юбку 21 ведущей КД 2 (Фиг. 7) и плотно примыкают к ее поверхности;
- дистальные концы навесных инструментальных каналов выполнены закругленными (Фиг. 4, поз. В);
- шип продольный 18 на НИКах выполнен не доходящим до кончика дистального конца и не доходящим до края проксимального конца НИК (Фиг. 4, поз. Б и В);
- конец ведущей КД 2, обращенный в сторону полости органа, выполнен в виде юбки 21 без продольных пазов и без циркулярной борозды 22 (Фиг. 7А);
- промежуточные КД 3 выполнены в виде пяти витых пружин с 3,5 витками вокруг эндоскопа 6 (Фиг. 8, Фиг. 9);
- столешница-держатель 5 выполнена звездчатой формы.
Тушу свиньи уложили на манипуляционный стол, взяли заявленное устройство за рукоятку 12 и ввели через сфинктер анального канала гибкую рабочую часть 6, оснащенную пятью НИКами 1, на 3-х, 5-ти, 8-ми, 9-ти и 12-ти часах по циферблату, закрепленными на ведущей КД 2, на пяти промежуточных КД 3, замыкающей КД 4 и столешнице-держателе 5, в прямую кишку.
Введение гибкой рабочей части 6, оснащенной ведущей КД 2, пятью промежуточными КД 3, одной замыкающей КД 4 и пятью НИКами 1, через анальный сфинктер прошло беспрепятственно, вследствие обтекаемости формы управляемого дистального конца 7 гибкой рабочей части вместе с КД 2 и сминаемости всех НИКов при прохождении анального сфинктера.
Для имитации диагностической биопсии через штатный канал подачи воздуха и воды 9 в просвет прямой кишки инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК, расположенный на 3 часах по циферблату подсоединили к аквапуратору, штатный рабочий канал 8 подсоединили к аспиратору, одновременно в просвет органа подали струю воды под давлением и выполнили аспирацию промывных жидкостей, таким образом, отмыли слизистую оболочку от слизи и остатков кишечного содержимого, осмотрели ее. Условно определили необходимость проведения биопсии слизистой оболочки. Для имитации проведения биопсии слизистой оболочки в НИК 1, расположенный на 9-ти часах по циферблату, ввели биопсийные щипцы и отщипнули кусочек слизистой с последующим его извлечением.
Введение и выведение эндоскопического инструмента из просвета органа прошло беспрепятственно. В процессе диагностики спадания исследуемой полости не наблюдалось.
Для имитации проведения полипэктомии через штатный канал подачи воздуха и воды 9 в просвет прямой кишки инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, управляемый дистальный конец 7 гибкой рабочей части 6 подвели к месту условной полипэктомии.
Через НИК на 5-ти часах по циферблату ввели электрохирургическую петлю, через НИК на 9-ти часах по циферблату, ввели инжектор, через НИК на 12-ти часах по циферблату, ввели клипатор. НИК на 8-ми часах по циферблату оставили в резерве для введения другого инструмента или изменения угла «атаки». Затем инжектором подкололись в подслизистый слой прямой кишки, ввели необходимое количество физраствора для создания инфильтрационной «подушки» - условного полипа, после этого инжектор удалили.
Раскрыли электрохирургическую петлю, подвели петлю к условному полипу, накинули на него. Для радикальности резекции через НИК на 9-ти часах ввели биопсийные щипцы, захватили условный полип за верхушку и подтянули его ближе к торцу гибкой рабочей части, таким образом, чтобы электрохирургическая петля опустилась ближе к кишечной стенке с охватом полипа и его псевдоножки, затем петлю затянули и подали на нее электрический ток, условный полип срезали, на месте резекции образовалась раневая поверхность с оголенным подслизистым слоем, условный полип фрагментировали электрохирургической петлей, фрагменты условного полипа извлекли наружу щипцами, затем щипцы и электрохирургическую петлю удалили за ненадобностью, через НИК на 3-х часах в полость органа подали струю воды под давлением, выполнили промывание раневой поверхности, промывную жидкость аспирировали через штатный рабочий канал 8. Оценили локализацию раневой поверхности в операционном пространстве - на экране монитора раневая поверхность расположилась на 3-х часах по циферблату. После этого выбрали оптимальное расположение НИК для подведения щипцов типа «крысиный зуб» с целью сведения краев раны, т.е. НИКи, расположенные на контрлатеральной стороне от раны на 8-ми и 9-ти часах по циферблату. Ввели щипцы типа «крысиный зуб» через НИК на 9-ти часах, захватили края раневого дефекта и свели вплотную друг к другу, затем клипатором, расположенным на 12-ти часах по циферблату произвели клипирование краев раневого дефекта. Щипцы типа «крысиный зуб» удалили. Клипирование краев раневого дефекта оказалось не полным, а расположение краев раны оказалось также не совсем удобным для последующего захвата клипсами, поэтому клипатор с клипсой ввели через НИК, расположенный на 8-ми часах по циферблату, изменив угол «атаки» инструмента и окончательно фиксировали края раны друг к другу, наложив еще две клипсы. При этом клипатор дважды беспрепятственно извлекали для перезарядки клипс.
В процессе клипирования местоположение и угол «атаки» инструментом были оптимальны - позицию управляемого дистального конца 7 гибкой рабочей части 6 эндоскопа не меняли.
Через НИК, расположенный на 3-х часах по циферблату выполнили отмывание операционного поля водой с последующей аспирацией промывных вод через штатный рабочий канал 8. Оценили результат клипирования.
По завершении условных лечебно-диагностических действий из НИК 1 удалили все инструменты 17 (Фиг. 1), затем через штатный рабочий канал 8 аспирировали воздух из внутреннего операционного пространства, после чего удалили заявленное устройство и завершили условное медицинское вмешательство.
Все манипуляции, начиная от диагностики и заканчивая лечебным вмешательством, выполняли без извлечения эндоскопа из туши свиньи и не меняя позицию его управляемого дистального конца 7 гибкой рабочей части по отношению к условно патологическому образованию и к раневой поверхности. Введение и выведение эндоскопического инструмента через НИКи прошло беспрепятственно. В процессе операции спадания внутреннего операционного пространства не наблюдалось. Наличие многоканальности эндоскопа способствовало одновременному использованию min двух инструментов (электрохирургической петли и щипцов, клипатора и щипцов типа «крысиный зуб»), ротации инструментов с изменением их угла «атаки», и оптимизировало доступ инструментами к тяжело доступным участкам операционного поля, а также способствовало раздельному подключению аквапуратора и аспиратора (каждого в свой канал), предоставив возможность одновременного их использования при отмывании раневого дефекта.
ПРИМЕР 4 по варианту 2. Проведение эндоскопического диагностического исследования и лечебного вмешательства на полом органе верхнего отдела ЖКТ, например, желудке, с заявленным устройством с одним НИК и эндоскопом по варианту 2 без штатного рабочего канала (Фиг. 1Б, Фиг. 3).
Берут заявленное устройство по варианту 2, собранное по описанному выше алгоритму.
При выборе количества НИК, разновидности их дистального конца 14, вариантов исполнения шипа продольного 18 (Фиг. 4, поз А, поз. Б, поз. В), количества КД и их расположения на гибкой рабочей части эндоскопа учитывали особенности строения верхнего отдела ЖКТ, например, небольшой диаметр раскрытия ВПС, а также цель эндоскопического вмешательства.
По примеру 4 для взятия биопсии:
- на эндоскопе с помощью КД зафиксировали, например, один НИК на 5-ти часах по часовому циферблату, таким образом, что скошенный дистальный конец НИК (Фиг. 4, поз. А) не выходит на юбку 21 ведущей КД 2 (Фиг. 7);
- дистальный конец 14 НИК 1 выполнен скошенным (Фиг. 4, поз. А);
- шип продольный 18 на НИК выполнен доходящим до кончика дистального скошенного конца и не доходящим до края проксимального конца НИК (Фиг. 4, поз. А);
- конец ведущей КД 2, обращенный в сторону полости органа, выполнен в виде юбки 21 без продольных пазов и без циркулярной борозды 22 (Фиг. 7А);
- промежуточные КД 3 выполнены в виде двух витых пружин с 1,5 витками вокруг гибкой рабочей части эндоскопа 6 (Фиг. 8, Фиг. 9),
- столешница-держатель 5 выполнена в форме окружности (Фиг. 12),
Тушу свиньи уложили на манипуляционный стол, развели пасть свиньи, зафиксировали пасть в открытом состоянии, взяли заявленное устройство за рукоятку 12, и затем последовательно - вначале в глотку, потом в пищевод и в желудок ввели гибкую рабочую часть 6, оснащенную одним НИКом 1 на 5-ти часах по циферблату, закрепленным на ведущей КД 2, на двух промежуточных КД 3, замыкающей КД 4 и столешнице-держателе 5.
Введение гибкой рабочей части 6, оснащенной ведущей КД 2, двумя промежуточными КД 3, одной замыкающей КД 4 и одним НИКом 1 прошло беспрепятственно вследствие малого диаметра и обтекаемости клиновидной формы управляемого дистального конца 7 гибкой рабочей части вместе с КД 2, и сминаемости НИК при прохождении верхнего пищеводного сфинктера.
Для имитации диагностической биопсии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК 1 подсоединили к аквапуратору и в полость органа подали струю воды под давлением, отмыли слизистую оболочку от слизи и остатков пищи, НИК 1 отсоединили от аквапуратора и подсоединили к аспиратору, выполнили аспирацию промывных жидкостей, осмотрели слизистую оболочку. Условно определили необходимость проведения биопсии слизистой оболочки. Для имитации проведения биопсии слизистой оболочки через НИК1 ввели биопсийные щипцы и отщипнули кусочек слизистой с последующим его извлечением.
Введение и выведение эндоскопического инструмента из просвета органа прошло беспрепятственно. В процессе диагностики спадания исследуемой полости не наблюдалось.
Для имитации проведения полипэктомии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, управляемый дистальный конец 7 гибкой рабочей части 6 подвели к месту условной полипэктомии, через НИК в просвет органа ввели инжектор, подкололись в подслизистый слой желудка, ввели необходимое количество физраствора для создания инфильтрационной «подушки» - условного полипа, после этого инжектор удалили.
Через НИК1 в просвет органа ввели электрохирургическую петлю, раскрыли и накинули на условный полип, петлю затянули на псевдоножке условного полипа и подали на петлю электрический ток, полип срезали, на месте резекции образовалась раневая поверхность с оголенным подслизистым слоем, удаленный условный полип фрагментировали петлей, затем электрохирургическую петлю извлекли из НИК. Через НИК ввели щипцы и извлекли наружу фрагменты условного полипа. Подсоединили к НИК аквапуратор, в полость органа на раневую поверхность подали струю воды под давлением, выполнили промывание раневой поверхности, НИК 1 отсоединили от аквапуратора и подсоединили к аспиратору, аспирировали промывную жидкость. Затем оценили расположение раневой поверхности в операционном пространстве - на экране монитора. Раневая поверхность расположилась на 7-ми часах по циферблату на передней стенке нижней трети тела желудка ближе к большой кривизне. После этого через НИК, расположенный на 5-ти часах по циферблату ввели клипатор с клипсой и соединили края раны. Для полного и окончательного закрытия раны потребовалось наложить вторую клипсу - под другим углом «атаки», поменяв позицию управляемого дистального конца 7 гибкой рабочей части 6. При этом клипатор дважды беспрепятственно извлекали для перезарядки клипс.
По завершении условных лечебно-диагностических действий из НИК 1 удалили эндоскопический инструмент, через него же аспирировали воздух из внутреннего операционного пространства, после чего удалили заявленное устройство, завершили условное медицинское вмешательство.
Все манипуляции, начиная от диагностики и заканчивая лечебным вмешательством, выполняли без извлечения эндоскопа из туши свиньи, но при этом меняли позицию управляемого дистального конца 7 гибкой рабочей части 6 по отношению к условно патологическому образованию и к раневой поверхности. Введение и выведение эндоскопического инструмента через НИК прошло беспрепятственно. В процессе операции спадания внутреннего операционного пространства не наблюдалось. Наличие многоканальности эндоскопа способствовало поочередной ротации инструментов (электрохирургической петли, щипцов и клипатора), по мере их необходимости, а изменение их угла «атаки» достигалось изменением позиции управляемого дистального конца 7 гибкой рабочей части 6 и оптимизировало доступ инструментам к трудно-доступным участкам операционного поля, а также способствовало поочередному подключению аквапуратора и аспиратора, предоставив возможность их поочередного использования при отмывании раневого дефекта. Эндоскоп по варианту 2 с поставленной задачей справился. НИК работает аналогично штатному рабочему каналу 8 по варианту 1.
ПРИМЕР 5 по варианту 2. Проведение эндоскопического диагностического исследования и лечебного вмешательства на полом органе верхнего отдела ЖКТ, например, желудке, с заявленным устройством с тремя НИК и эндоскопом по варианту 2 без штатного рабочего канала (Фиг. 1Б, Фиг. 3).
Берут заявленное устройство по варианту 2, собранное по описанному выше алгоритму.
На выбор разновидности НИК (форму дистального конца 14, вариантов исполнения шипа продольного 18 (Фиг. 4, поз А, поз. Б, поз. В), количества НИК и количества КД, их расположения на гибкой рабочей части эндоскопа оказывают особенности строения верхнего отдела ЖКТ, например, небольшой диаметр раскрытия ВПС, а также цель эндоскопического вмешательства.
По примеру 5 для взятия биопсии:
- на эндоскопе с помощью КД зафиксировали, например, три НИКа по нижне-правой полуокружности гибкой рабочей части на 3-х, 5-ти и 8-ми часах по часовому циферблату, таким образом, что скошенные дистальные концы всех НИК (Фиг. 4, поз. Б) выходят на юбку 21 ведущей КД 2 (Фиг. 7) и плотно примыкают к ее поверхности;
- дистальные концы 14 НИК 1 выполнены скошенными (Фиг. 4, поз. Б);
- шип продольный 18 на НИК выполнен не доходящими до кончика дистального скошенного конца и не доходящим до края проксимального конца НИК (Фиг. 4, поз. Б);
- конец ведущей КД 2, обращенный в сторону полости органа, выполнен в виде юбки 21 без продольных пазов, с циркулярной бороздой 22 по краю внешней поверхности (Фиг. 7Б);
- НИК, расположенный на 5 часах по циферблату предварительно оснастили электрохирургической петлей. Петлю раскрыли и зафиксировали на циркулярной борозде 22 юбки 21 ведущей КД 2, путем затягивания петли, таким образом, чтобы последняя полностью погрузилась в циркулярную борозду 21;
- промежуточные КД 3 выполнены в виде трех витых пружин с 2,5 витками вокруг гибкой рабочей части эндоскопа 6 (Фиг. 8, Фиг. 9);
- столешница-держатель 5 выполнена в форме треугольника.
Тушу свиньи уложили на манипуляционный стол, взяли заявленное устройство за рукоятку 12, развели пасть свиньи, зафиксировали пасть в открытом состоянии, и затем последовательно - вначале в глотку, потом в пищевод и в желудок ввели гибкую рабочую часть 6, оснащенную тремя НИКами 1, закрепленными на КД 2, КД 3, КД 4,, и столешнице-держателе 5, и одним инструментом в НИК.
Проведение гибкой рабочей части 6, оснащенной ведущей КД 2, тремя промежуточными КД 3, одной замыкающей КД 4, тремя НИКами 1 и с одним инструментом в НИК, через ВПС прошло беспрепятственно, вследствие расположения всех НИК в пределах одной полуокружности, меньшего диаметра и обтекаемости клиновидной формы управляемого дистального конца 7 гибкой рабочей части вместе с КД 2 и сминаемости двух свободных НИК.
Для имитации диагностической биопсии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК 1, расположенный на 3-х часах по циферблату подсоединили к аквапуратору и в полость органа подали струю воды под давлением, отмыли слизистую оболочку от слизи и остатков пищи, через НИК, расположенный на 8-ми часах по циферблату выполнили одновременную аспирацию промывных жидкостей, осмотрели слизистую оболочку. Условно определили необходимость проведения биопсии слизистой оболочки. Для имитации проведения биопсии слизистой оболочки НИК, расположенный на 8-ми часах по циферблату, отсоединили от аспиратора, ввели через НИК биопсийные щипцы и отщипнули кусочек слизистой с последующим его извлечением.
Введение и выведение эндоскопического инструмента из просвета органа прошло беспрепятственно. В процессе диагностики спадания внутреннего операционного пространства не наблюдалось.
Для имитации проведения полипэктомии через штатный канал подачи воздуха и воды 9 в просвет желудка инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, управляемый дистальный конец 7 гибкой рабочей части 6 подвели к месту условной полипэктомии, через НИК на 8-ми часах по циферблату, ввели инжектор, инжектором подкололись в подслизистый слой желудка, ввели необходимое количество физраствора для создания инфильтрационной «подушки» - условного полипа, после этого инжектор удалили.
Для резекции условного полипа освободили электрохирургическую петлю (в НИК на 5-ти часах), из циркулярной борозды 22 юбки 21 ведущей клипсы 2 и накинули на условный полип. Для радикальности резекции через НИК на 8-ми часах по циферблату ввели щипцы, захватили условный полип и подтянули его ближе к торцу управляемого дистального конца 7 гибкой рабочей части, таким образом, чтобы электрохирургическая петля опустилась ближе к желудочной стенке и охватила собой условный полип и его псевдоножку. После этого петлю затянули на псевдоножке условного полипа и подали на петлю электрический ток, полип срезали, на месте резекции образовалась раневая поверхность с оголенным подслизистым слоем, удаленный условный полип фрагментировали петлей, щипцами извлекли наружу фрагменты условного полипа, удалили щипцы из НИК на 8-ми часах по циферблату, электрохирургическую петлю извлекли из НИК на 5-ти часах по циферблату, подсоединили к НИК на 5-ти часах аспиратор, к НИК на 3-х часах подсоединили аквапуратор, в полость органа на раневую поверхность подали струю воды под давлением, выполнили промывание раневой поверхности, промывную жидкость аспирировали через НИК на 5-ти часах по циферблату, оценили расположение раневой поверхности в операционном пространстве - на экране монитора раневая поверхность расположилась на 7-ми часах по циферблату на передней стенке нижней трети тела желудка ближе к большой кривизне. После этого выбрали оптимальный угол «атаки» для подведения щипцов типа «крысиный зуб» для сведения краев раны. В данном случае НИК, расположенный на 3-х часах по циферблату (на контрлатеральной стороне от раны) оказался наиболее оптимальным для захвата и сведения краев раны. Для этого от НИК на 3-х часах по циферблату отсоединили аквапуратор, ввели щипцы типа «крысиный зуб», ухватили и свели края раны. Через НИК, расположенный на 5-ти часах по циферблату ввели клипатор с клипсой и фиксировали края раны между собой. Для полного закрытия раны потребовалось наложить вторую клипсу также с контрлатеральной стороны, но под другим углом «атаки». Для этого из НИК, расположенного на 3-х часах по циферблату, удалили щипцы типа «крысиный зуб». Затем в него завели клипатор и полностью заклипировали края раны, наложив вторую клипсу. При этом клипатор дважды беспрепятственно извлекали для перезарядки клипс, и меняли его местоположение и угол «атаки» не меняя позицию управляемого дистального конца 7 гибкой рабочей части 6 эндоскопа.
По завершении условных лечебно-диагностических действий из всех НИК 1 удалили эндоскопические инструменты 17 (Фиг. 1), затем через НИК на 5-ти часах по циферблату аспирировали воздух из внутреннего операционного пространства, после чего удалили заявленное устройство и завершили условное медицинское вмешательство.
Все манипуляции, начиная от диагностики и заканчивая лечебным вмешательством, выполняли без извлечения эндоскопа из туши свиньи и не меняя позицию его управляемого дистального конца 7 гибкой рабочей части по отношению к условно патологическому образованию и к раневой поверхности. Введение и выведение эндоскопического инструмента через НИКи прошло беспрепятственно. В процессе операции спадания внутреннего операционного пространства не наблюдалось. Наличие многоканальности эндоскопа способствовало одновременному использованию min двух инструментов (электрохирургической петли и щипцов, клипатора и щипцов типа «крысиный зуб»), ротации инструментов с изменением их угла «атаки», и оптимизировало доступ инструментами к трудно-доступным участкам операционного поля, а также способствовало раздельному подключению аквапуратора и аспиратора (каждого в свой канал), предоставив возможность одновременного их использования при отмывании раневого дефекта.
ПРИМЕР 6 по варианту 2. Проведение эндоскопического диагностического исследования и лечебного вмешательства на полом органе нижнего отдела ЖКТ, например, прямой кишке, с заявленным устройством с пятью НИК и эндоскопом по варианту 2 без штатного рабочего канала (Фиг. 1Б, Фиг. 3).
Берут заявленное устройство по варианту 2, собранное по описанному выше алгоритму.
На выбор разновидности НИК (форму дистального конца 14, вариантов исполнения шипа продольного 18 (Фиг. 4, поз. А, поз. Б, поз. В), количества НИК и количества КД, их расположения на гибкой рабочей части эндоскопа оказывают особенности строения нижнего отдела ЖКТ, например, большего раскрытия анального сфинктера, а также цель эндоскопического вмешательства.
По примеру 6 для взятия биопсии:
- на эндоскопе с помощью КД фиксируют, например, пять НИК по всей окружности гибкой рабочей части на 3-х, 5-ти, 8-ми, 9-ти и 12-ти часах по часовому циферблату, таким образом, что дистальные концы всех НИК (Фиг. 4, поз. В) выходят на юбку 21 ведущей КД 2 (Фиг. 7) и плотно примыкают к ее поверхности;
- дистальные концы навесных инструментальных каналов выполнены закругленными (Фиг. 4, поз. В);
- шип продольный 18 на НИКах выполнен не доходящим до кончика дистального конца и не доходящим до края проксимального конца НИК (Фиг. 4, поз. Б и В);
- конец ведущей КД 2, обращенный в сторону полости органа, выполнен в виде юбки 21 без продольных пазов и без циркулярной борозды 22 (Фиг. 7А);
- промежуточные КД 3 выполнены в виде пяти витых пружин с 3,5 витками вокруг эндоскопа 6 (Фиг. 8, Фиг. 9);
- столешница-держатель 5 выполнена звездчатой формы,
Тушу свиньи уложили на манипуляционный стол, взяли заявленное устройство за рукоятку 12 и ввели через сфинктер анального канала гибкую рабочую часть 6, оснащенную пятью НИКами 1, на 3-х, 5-ти, 8-ми, 9-ти и 12-ти часах по циферблату, закрепленными на ведущей КД 2, на пяти промежуточных КД 3, замыкающей КД 4 и столешнице-держателе 5, в прямую кишку.
Введение гибкой рабочей части 6, оснащенной ведущей КД 2, пятью промежуточными КД 3, одной замыкающей КД 4 и пятью НИКами 1 через анальный сфинктер прошло беспрепятственно, вследствие малого диаметра и обтекаемости формы управляемого дистального конца 7 гибкой рабочей части вместе с КД 2 и сминаемости всех НИКов при прохождении анального сфинктера.
Для имитации диагностической биопсии через штатный канал подачи воздуха и воды 9 в просвет прямой кишки инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем НИК, расположенный на 3-х часах по циферблату подсоединили к аквапуратору, НИК на 5-ти часах по циферблату подсоединили к аспиратору, одновременно в просвет органа подали струю воды под давлением и выполнили аспирацию промывных жидкостей, таким образом, отмыли слизистую оболочку от слизи и остатков кишечного содержимого, осмотрели ее. Условно определили необходимость проведения биопсии слизистой оболочки. Для имитации проведения биопсии слизистой оболочки в НИК 1, расположенный на 9-ти часах по циферблату, ввели биопсийные щипцы и отщипнули кусочек слизистой с последующим его извлечением.
Введение и выведение эндоскопического инструмента из просвета органа прошло беспрепятственно. В процессе диагностики спадания исследуемой полости не наблюдалось.
Для имитации проведения полипэктомии через штатный канал подачи воздуха и воды 9 в просвет прямой кишки инсуффлировали воздух для раздувания просвета органа и создания внутреннего операционного пространства, управляемый дистальный конец 7 гибкой рабочей части 6 подвели к месту условной полипэктомии.
Через НИК на 5-ти часах по циферблату ввели электрохирургическую петлю, предварительно отсоединив НИК от аспиратора, через НИК на 9-ти часах по циферблату, ввели инжектор, через НИК на 12-ти часах по циферблату, ввели клипатор. НИК на 8-ми часах по циферблату оставили в резерве для введения другого инструмента или изменения угла «атаки». Затем инжектором подкололись в подслизистый слой прямой кишки, ввели необходимое количество физраствора для создания инфильтрационной «подушки» -условного полипа, после этого инжектор удалили.
Раскрыли электрохирургическую петлю, подвели петлю к условному полипу, накинули на него. Для радикальности резекции через НИК на 9-ти часах ввели биопсийные щипцы, захватили условный полип и подтянули его ближе к торцу гибкой рабочей части, таким образом, чтобы электрохирургическая петля опустилась ближе к кишечной стенке с охватом полипа и его псевдоножки, затем петлю затянули и подали на нее электрический ток, условный полип срезали, на месте резекции образовалась раневая поверхность с оголенным подслизистым слоем, условный полип фрагментировали электрохирургической петлей, фрагменты условного полипа извлекли наружу щипцами, затем щипцы и электрохирургическую петлю удалили за ненадобностью, через НИК на 3-х часах в полость органа подали струю воды под давлением, выполнили промывание раневой поверхности, промывную жидкость аспирировали через НИК, расположенный на 5-ти часах по циферблату, подсоединив его к аспиратору. Оценили локализацию раневой поверхности в операционном пространстве - на экране монитора раневая поверхность расположилась на 3-х часах по циферблату. После этого выбрали оптимальное расположение НИК для подведения щипцов типа «крысиный зуб» с целью сведения краев раны, т.е. НИКи, расположенные на контрлатеральной стороне от раны на 8-ми и 9-ти часах по циферблату. Ввели щипцы типа «крысиный зуб» через НИК на 9-ти часах, захватили края раневого дефекта и свели вплотную друг к другу, затем клипатором, расположенным на 12-ти часах по циферблату произвели клипирование краев раневого дефекта. Щипцы типа «крысиный зуб» удалили. Клипирование краев раневого дефекта оказалось не полным, а расположение краев раны оказалось также не совсем удобным для последующего захвата клипсами, поэтому клипатор с клипсой ввели через НИК, расположенный на 8-ми часах по циферблату, изменив угол «атаки» инструмента и окончательно фиксировали края раны друг к другу, наложив еще две клипсы. При этом клипатор дважды беспрепятственно извлекали для перезарядки клипс. В процессе клипирования местоположение и угол «атаки» инструментом были оптимальны - позицию управляемого дистального конца 7 гибкой рабочей части 6 эндоскопа не меняли.
Через НИК, расположенный на 3-х часах по циферблату выполнили отмывание операционного поля водой с последующей аспирацией промывных вод через НИК на 5-ти часах. Оценили результат клипирования.
По завершении условных лечебно-диагностических действий из НИК 1 удалили все инструменты 17 (Фиг. 1), затем через НИК на 5-ти часах аспирировали воздух из внутреннего операционного пространства, после чего удалили заявленное устройство и завершили условное медицинское вмешательство.
Все манипуляции, начиная от диагностики и заканчивая лечебным вмешательством, выполняли без извлечения эндоскопа из туши свиньи и не меняя позицию его управляемого дистального конца 7 гибкой рабочей части по отношению к условно патологическому образованию и к раневой поверхности. Введение и выведение эндоскопического инструмента через НИКи прошло беспрепятственно. В процессе операции спадания внутреннего операционного пространства не наблюдалось. Наличие многоканальности эндоскопа способствовало одновременному использованию min двух инструментов (электрохирургической петли и щипцов, клипатора и щипцов типа «крысиный зуб»), ротации инструментов с изменением их угла «атаки», и оптимизировало доступ инструментами к тяжело доступным участкам операционного поля, а также способствовало раздельному подключению аквапуратора и аспиратора (каждого в свой канал), предоставив возможность одновременного их использования при отмывании раневого дефекта.
Из описанного выше можно сделать вывод, что заявителем достигнут заявленный технический результат, а именно - устранены недостатки аналогов путем разработки устройства для эндоскопии и способа его использования (варианты), а именно - обеспечено:
- облегченное введение гибкой рабочей части эндоскопа внутрь полых органов вследствие меньшего диаметра гибкой рабочей части и обтекаемой формы управляемого дистального конца;
- увеличение количества рабочих каналов и, вследствие этого, одновременно используемых инструментов, что позволяет выполнять одновременные манипуляции количеством инструментов при возникновении такой потребности;
- возможность изменения угла «атаки» инструментов к оперируемому объекту без изменения позиции эндоскопа вследствие расположения рабочих каналов по окружности эндоскопа;
- возможность взаимозаменяемости и ротации инструментов между собой без выемки эндоскопа из тела пациента;
- возможность перехода от диагностики к лечебным манипуляциям без замены диагностического эндоскопа на операционный вследствие увеличения количества рабочих каналов и используемых в них инструментов. При этом не возникает разрыва во времени между процессами диагностики и лечебными манипуляциями;
- стабильную фиксацию навесных инструментальных каналов вдоль гибкой рабочей части и на рукоятке эндоскопа за счет клипс-держателей и столешницы-держателя;
- надежное расположение эндоскопических инструментов в навесных инструментальных каналах вдоль гибкой рабочей части эндоскопа;
- устранение вероятности переплетения наружных рукояток эндоскопических инструментов вследствие их фиксации на столешнице-держателе;
- снижение травмоопасности внутренних органов и риска возможных осложнений;
- снижение утомляемости оператора вследствие отсутствия повторных введений эндоскопа;
- уменьшение утечки раздувающего газа из полого органа вследствие наличия клапана.
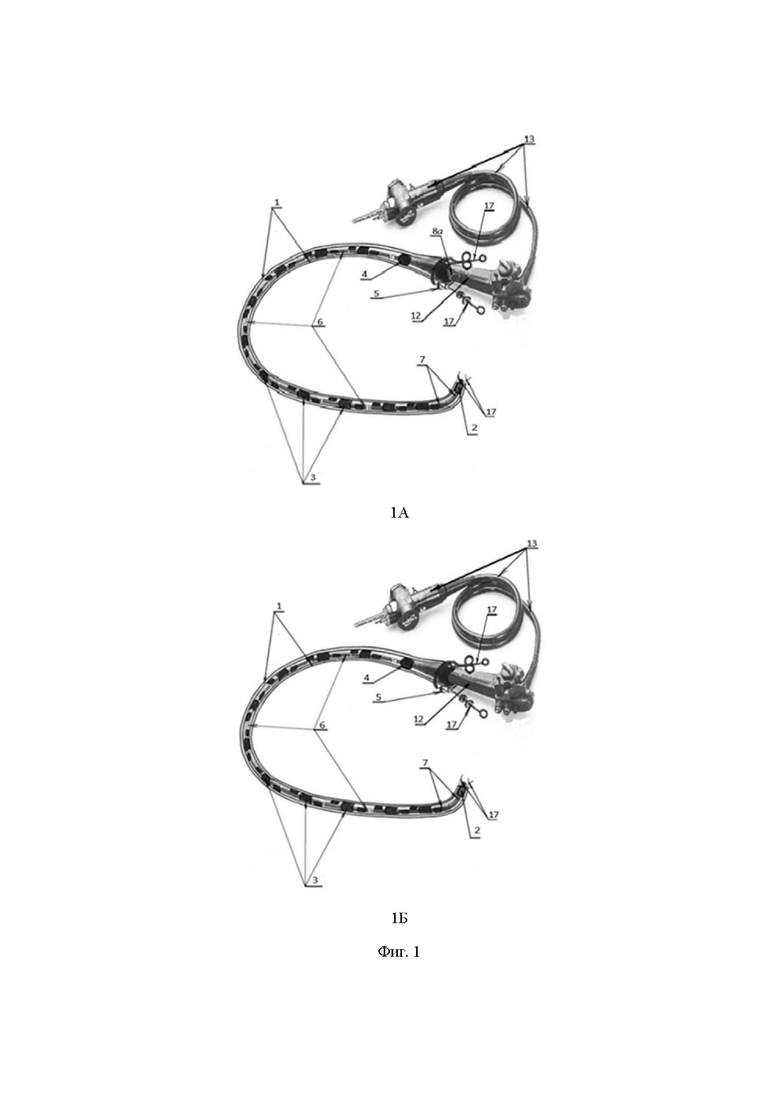
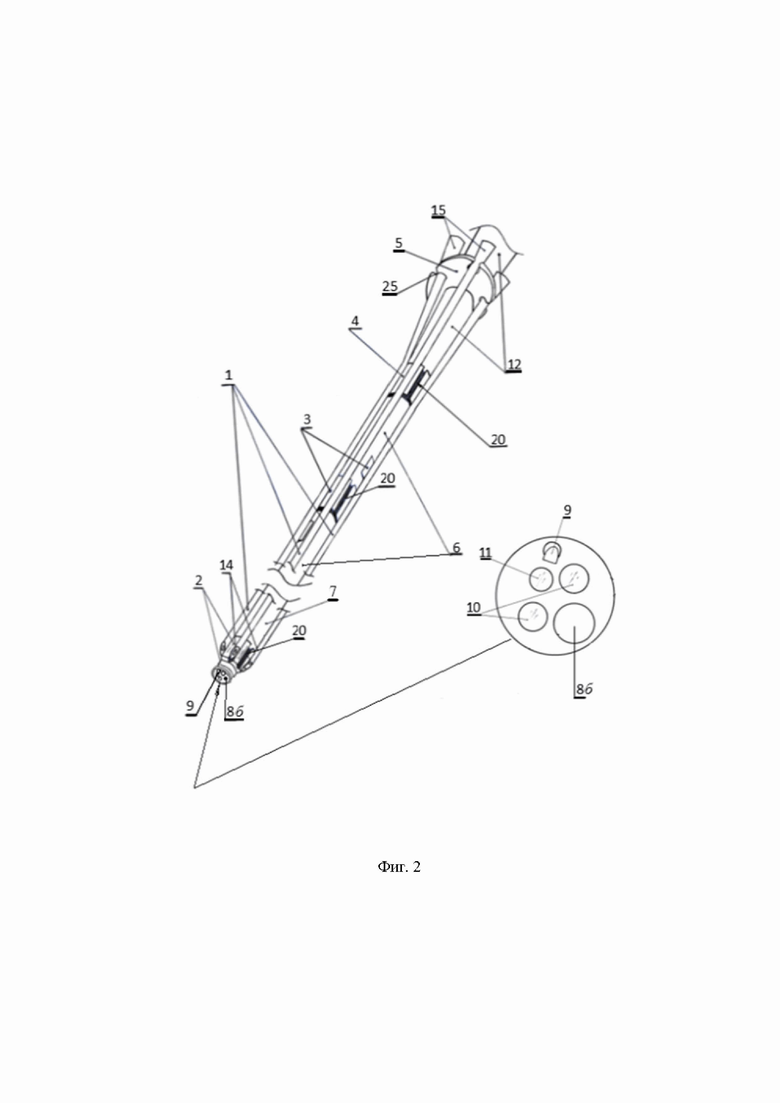
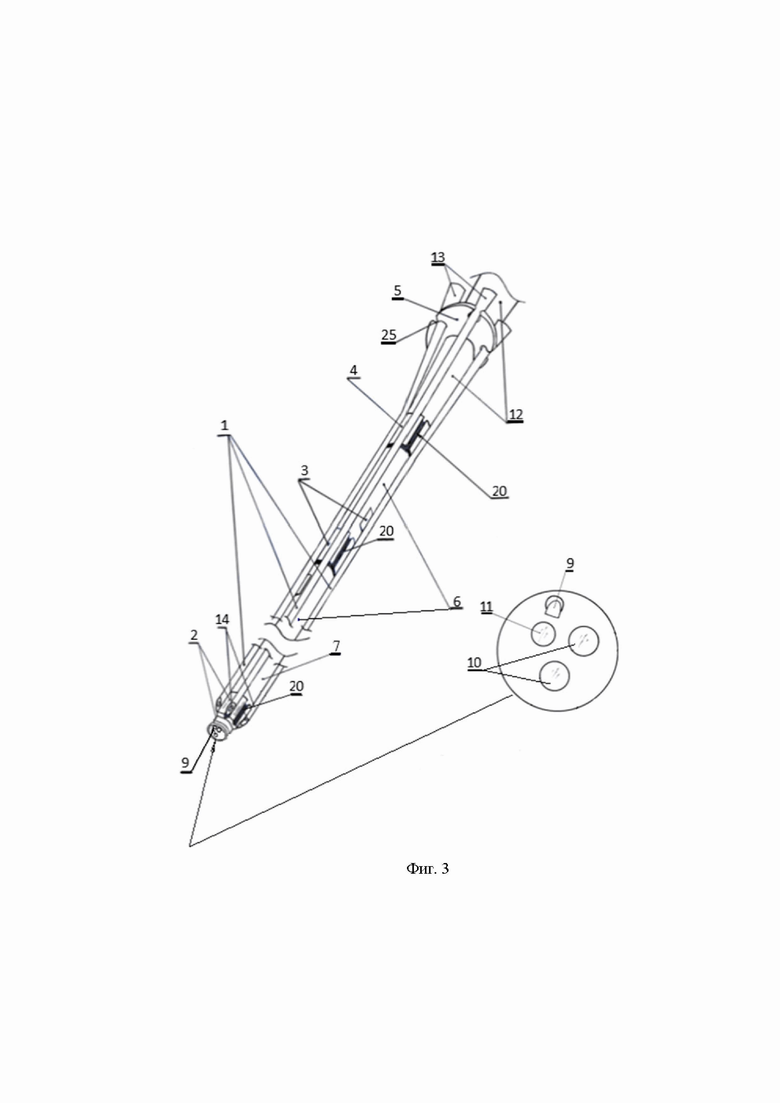
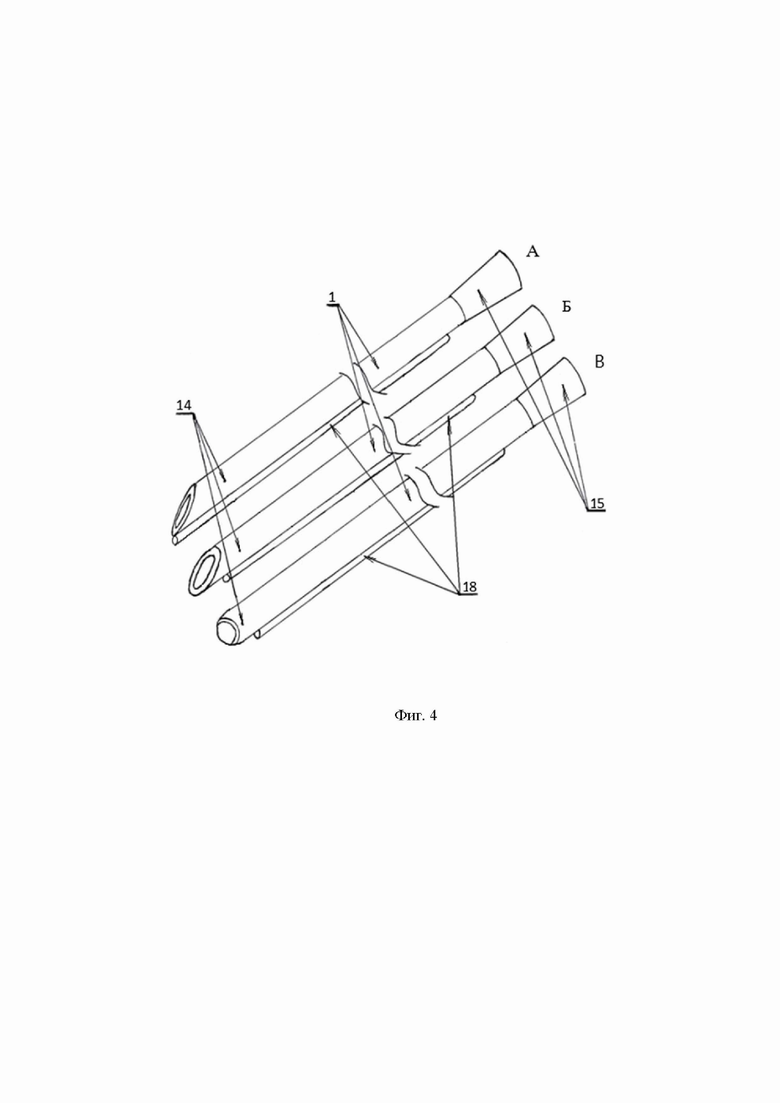
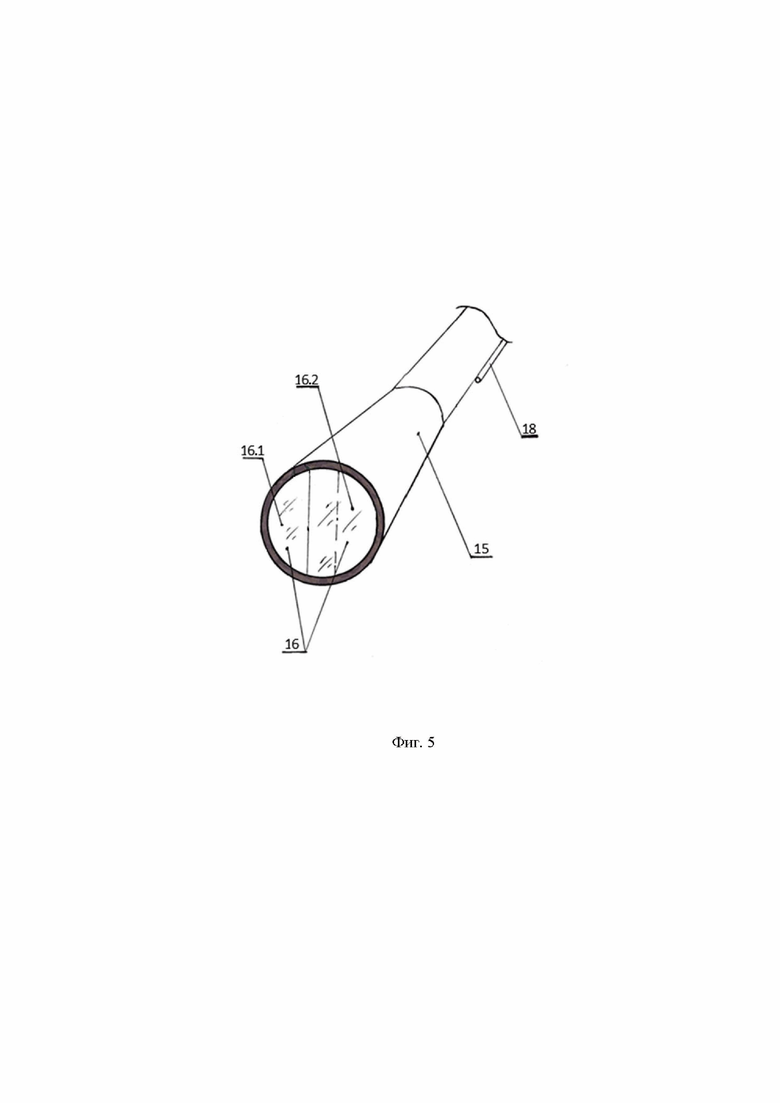
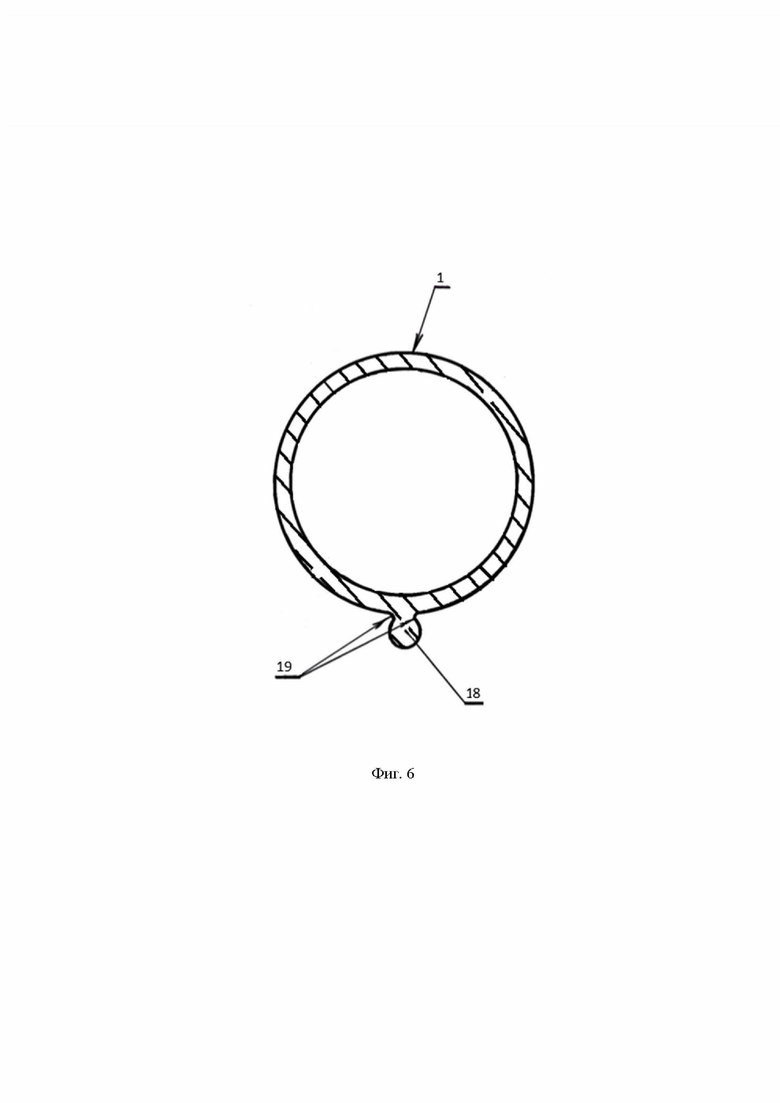
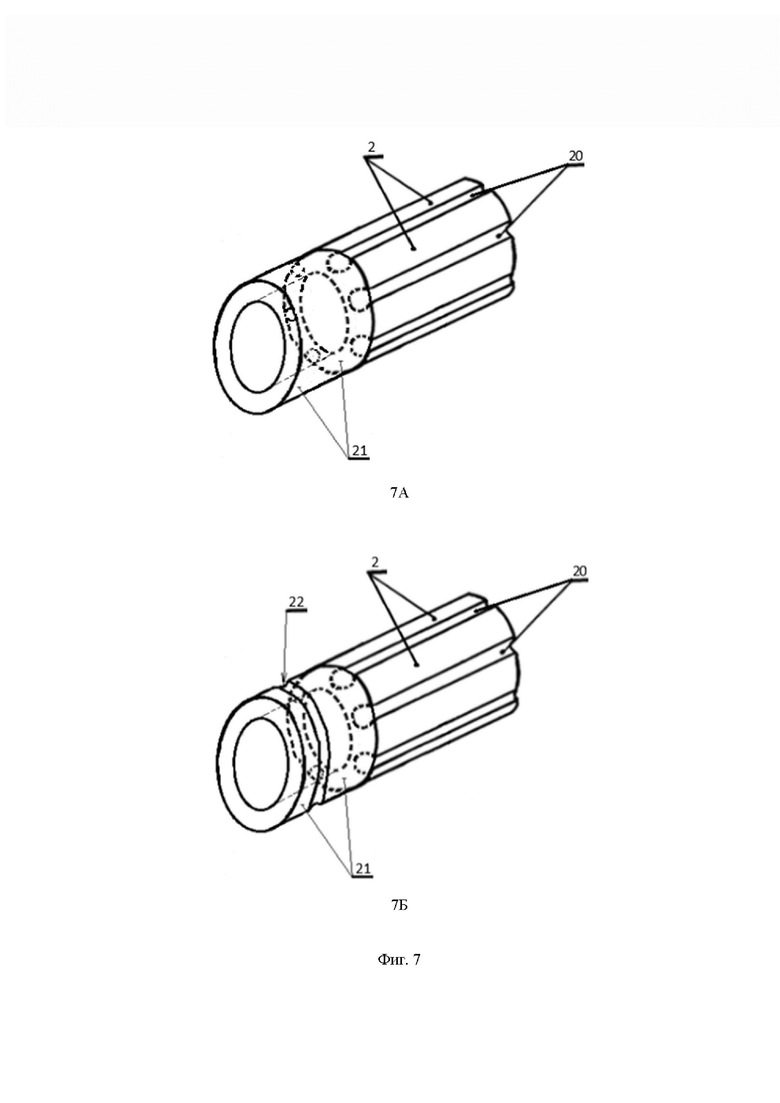
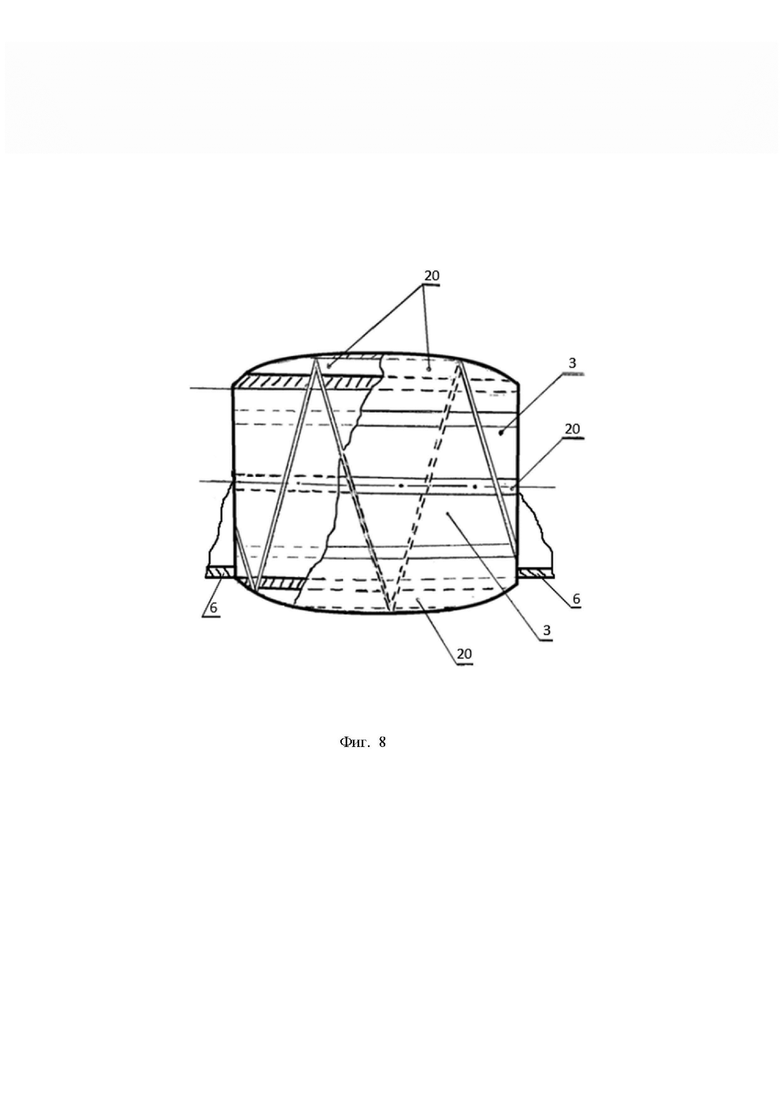
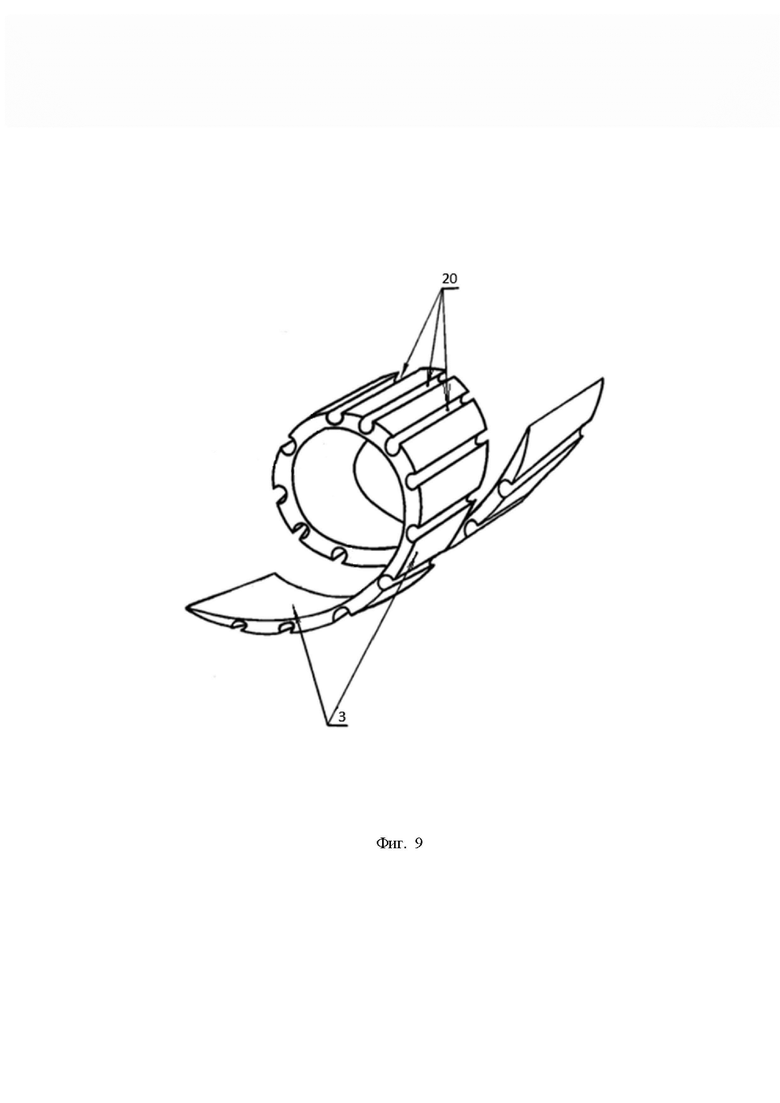
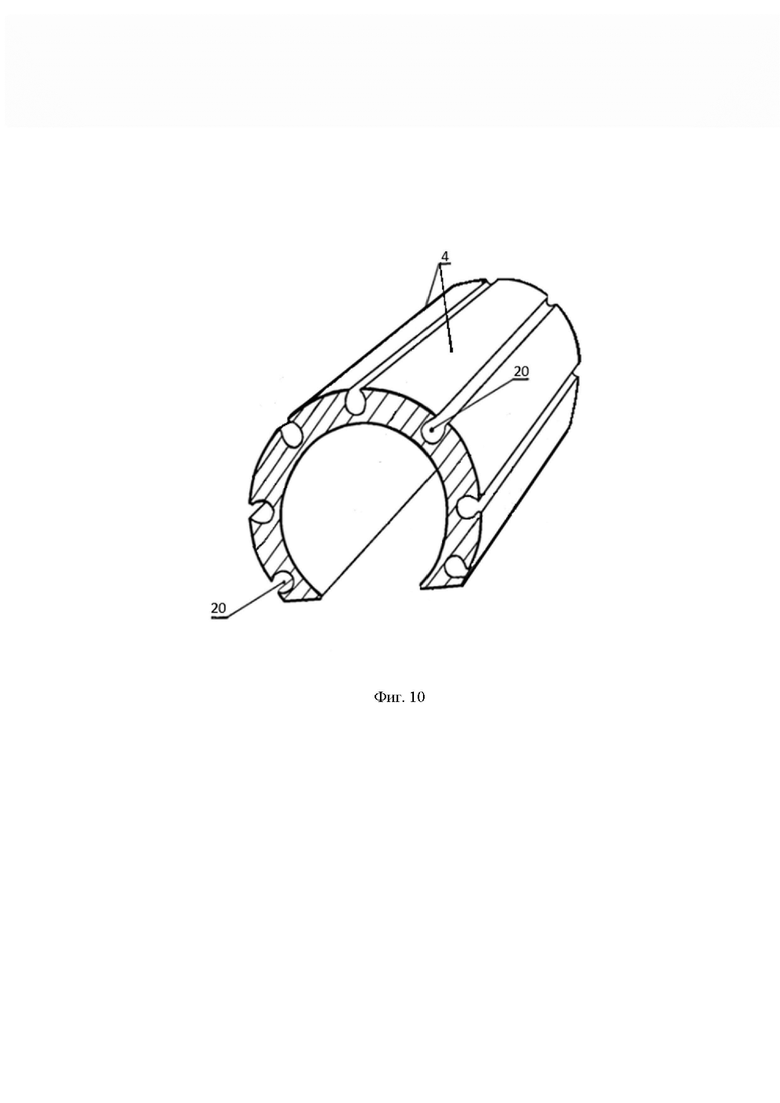
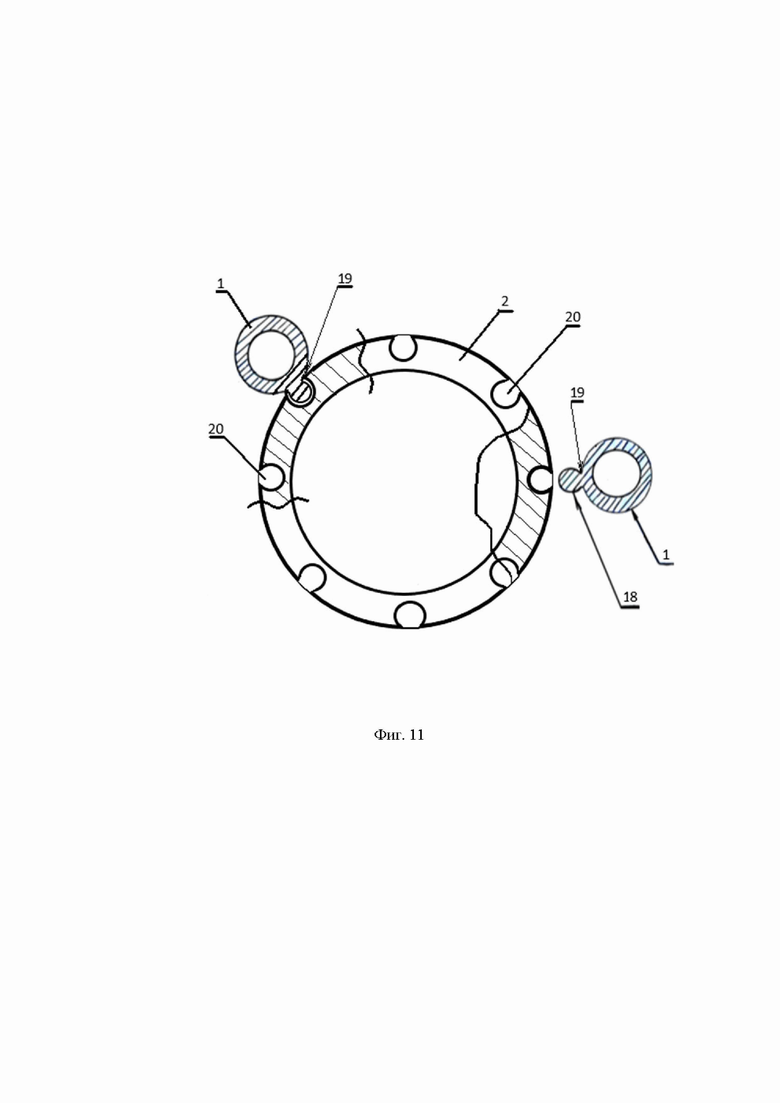
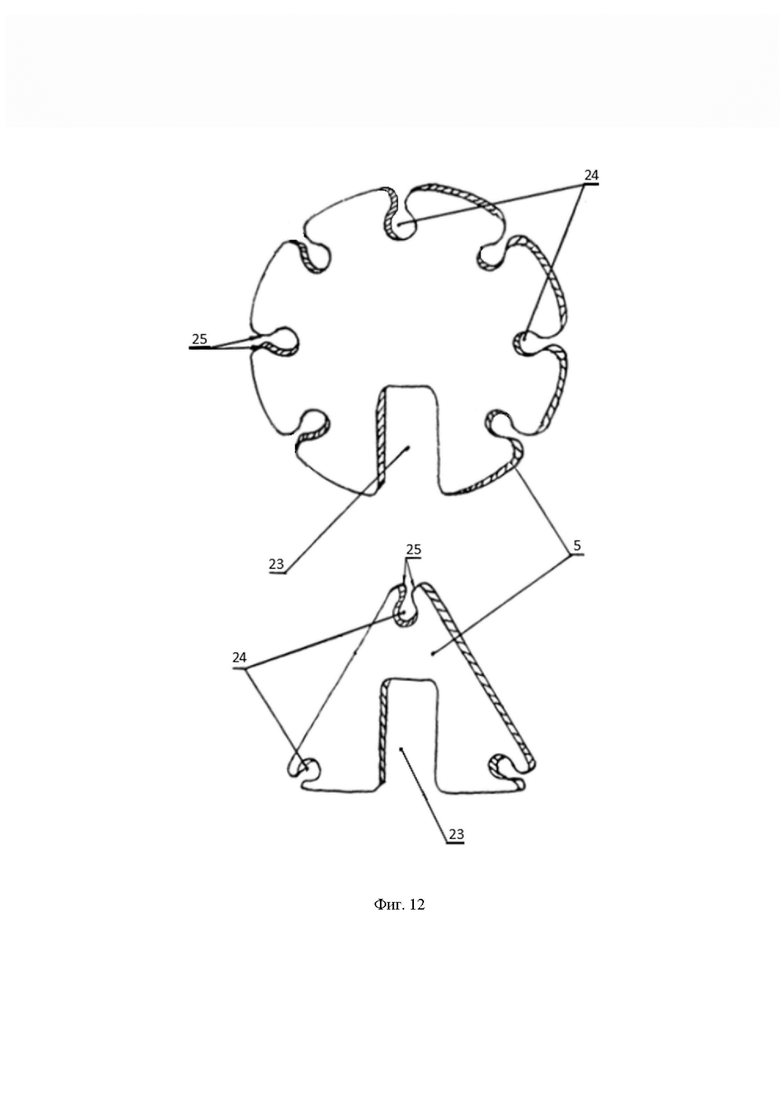
Группа изобретений относится к медицине. Устройство для эндоскопии, состоящее из эндоскопа, не менее одного навесного инструментального канала, клипс-держателей, столешницы-держателя; эндоскоп содержит гибкую рабочую часть с управляемым дистальным концом, содержащую внутри штатные каналы; навесные инструментальные каналы (НИК) выполнены в виде трубок из диэлектрического материала, инертного, упругоэластичного, прочного на разрыв, дистальные концы НИК выполнены атравматичными, а проксимальные концы выполнены с возможностью введения в НИК эндоскопических инструментов и оснащены эластичным клапаном с возможностью предупреждения утечки раздувающего газа, НИК зафиксированы на клипсах-держателях по окружности гибкой рабочей части с возможностью обеспечения доступа эндоскопического инструмента к участку исследуемого или оперируемого органа; клипсы-держатели (КД) содержат ведущую КД, промежуточные КД и замыкающую КД; столешница-держатель выполнена произвольной формы с U-образной выемкой, соответствующей сечению рукоятки с возможностью фиксации столешницы-держателя к рукоятке; элементы заявленного устройства соединены между собой следующим образом: НИК закреплены на гибкой рабочей части эндоскопа с помощью ведущей КД, промежуточных КД и замыкающей КД, проксимальные концы НИК зафиксированы в сквозных отверстиях столешницы-держателя, которая закреплена на рукоятке. Устройство для эндоскопии, состоящее из эндоскопа, не менее одного навесного инструментального канала, клипс-держателей, столешницы-держателя; эндоскоп содержит гибкую рабочую часть с управляемым дистальным концом, содержащую внутри штатные каналы; рукоятку с ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопку подачи воздуха и воды, соединительный кабель; навесные инструментальные каналы (НИК) выполнены в виде трубок из диэлектрического материала, инертного, упругоэластичного, прочного на разрыв, дистальные концы НИК выполнены атравматичными, а проксимальные концы выполнены с возможностью введения в НИК эндоскопических инструментов и оснащены эластичным клапаном с возможностью предупреждения утечки раздувающего газа; НИК зафиксированы на клипсах-держателях по окружности гибкой рабочей части с возможностью обеспечения доступа эндоскопического инструмента к участку исследуемого или оперируемого органа; клипсы-держатели (КД) содержат ведущую КД, промежуточные КД и замыкающую КД; столешница-держатель выполнена произвольной формы с U-образной выемкой, соответствующей сечению рукоятки с возможностью фиксации столешницы-держателя к рукоятке; элементы заявленного устройства соединены между собой следующим образом: НИК закреплены на гибкой рабочей части эндоскопа с помощью ведущей КД, промежуточных КД и замыкающей КД, проксимальные концы НИК зафиксированы в сквозных отверстиях столешницы-держателя, которая закреплена на рукоятке. Способ использования первого устройства для эндоскопии, заключающийся в том, что берут заявленное устройство за рукоятку и вводят в исследуемый или оперируемый полый орган пациента гибкую рабочую часть; для проведения диагностики осматривают и диагностируют обследуемый орган пациента с использованием штатного оснащения эндоскопа и не менее одного навесного инструментального канала; проводят диагностику и по ее результатам определяют программу лечения; для проведения лечения через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем дистальный конец гибкой рабочей части подводят к месту производства лечебных действий, через навесные инструментальные каналы в количестве не менее одного вводят эндоскопические инструменты, штатный рабочий аспирационно-инструментальный/биопсийный канал либо оставляют свободным для подачи воды и аспирации промывных вод и биологических жидкостей, либо используют для введения эндоскопического инструмента; затем с введёнными эндоскопическими инструментами выполняют лечебные действия; по завершении лечебных действий из штатного рабочего аспирационно-инструментального/биопсийного канала и навесных инструментальных каналов поочерёдно удаляют эндоскопические инструменты, затем удаляют воздух из внутреннего операционного пространства, после чего удаляют заявленное устройство, завершая медицинское вмешательство. Способ использования второго устройства для эндоскопии, заключающийся в том, что берут заявленное устройство за рукоятку и вводят в исследуемый или оперируемый полый орган пациента гибкую рабочую часть; для проведения диагностики осматривают и диагностируют обследуемый орган пациента с использованием штатного оснащения эндоскопа и не менее одного навесного инструментального канала; проводят диагностику и по результатам диагностики определяют программу лечения; для проведения лечения через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем дистальный конец гибкой рабочей части подводят к месту производства лечебных действий, через навесные инструментальные каналы в количестве не менее одного вводят эндоскопические инструменты, затем с введёнными в навесные инструментальные каналы эндоскопическими инструментами выполняют лечебные действия; по завершении лечебных действий из навесных инструментальных каналов поочерёдно удаляют эндоскопические инструменты, затем удаляют воздух из внутреннего операционного пространства, после чего удаляют заявленное устройство, завершая медицинское вмешательство. Техническим результатом является облегченное введение гибкой рабочей части эндоскопа внутрь полых органов вследствие меньшего диаметра гибкой рабочей части и обтекаемой формы управляемого дистального конца. 4 н. и 5 з.п. ф-лы, 12 ил.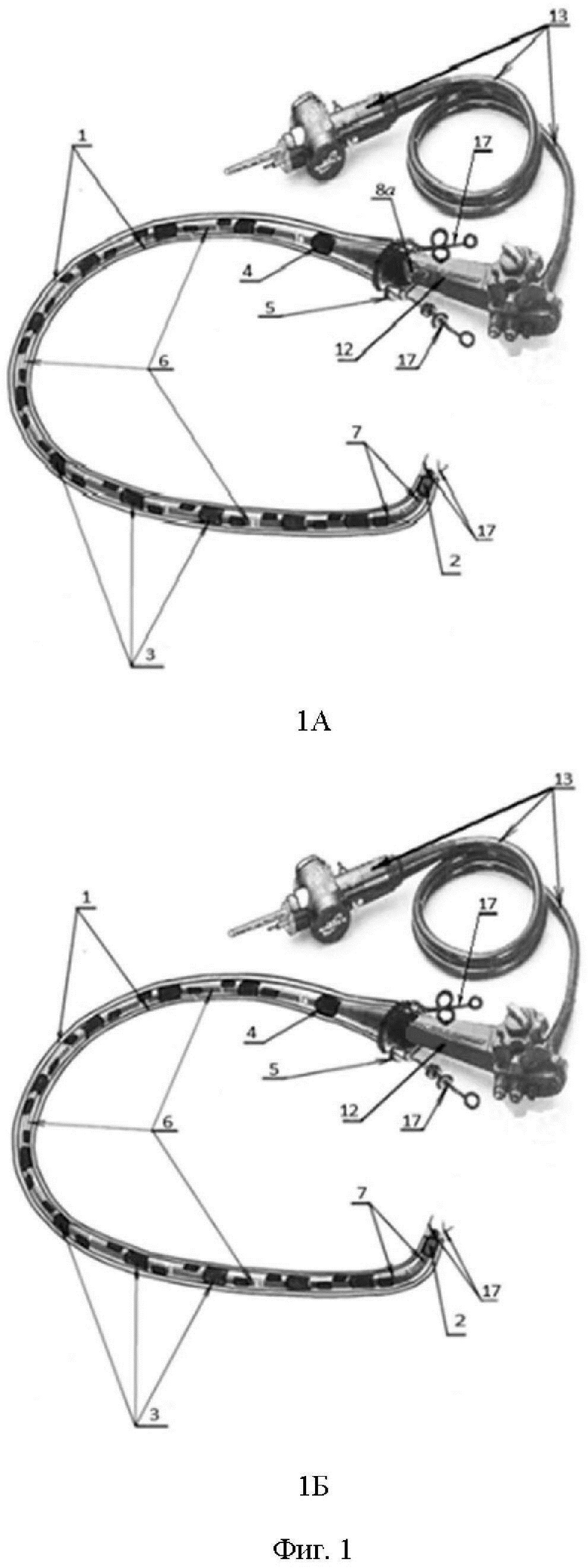
1. Устройство для эндоскопии, состоящее из эндоскопа, не менее одного навесного инструментального канала, клипс-держателей, столешницы-держателя;
при этом эндоскоп содержит гибкую рабочую часть с управляемым дистальным концом, содержащую внутри штатные каналы: освещения, передачи изображения, комбинированный подачи воздуха и воды, размещения кинематики, штатный рабочий аспирационно-инструментальный/биопсийный; рукоятку с расположенными на ней ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопки управления аспирацией и подачи воздуха и воды, соединительный кабель;
при этом навесные инструментальные каналы выполнены в виде трубок из диэлектрического материала, разрешённого к применению в медицине, инертного, не разрушающегося при дезинфекции, упругоэластичного, прочного на разрыв,
при этом дистальные концы навесных инструментальных каналов выполнены атравматичными – скошенными или закруглёнными, а проксимальные концы выполнены в виде воронки с возможностью введения в навесные инструментальные каналы эндоскопических инструментов и оснащены эластичным клапаном с возможностью предупреждения утечки раздувающего газа, в виде двух встречно размещённых эластичных мембран, причём каждая из мембран одним краем присоединена к краю проксимального конца навесного инструментального канала, а свободные края мембран плотно и внахлёст прилегают друг к другу, заходя одна за другую с возможностью перекрывания просвета навесного инструментального канала и предупреждения утечки раздувающего газа из оперируемой полости, а также с возможностью пропускания эндоскопического инструмента путём охвата его в виде манжеты;
по всей длине наружной поверхности каждого навесного инструментального канала монолитно с ним выполнен шип продольный в виде выступа таким образом, что место соединения навесного инструментального канала и шипа продольного выполнено зауженным в виде «талии» с возможностью фиксации навесного инструментального канала в клипсах-держателях;
при этом длина навесных инструментальных каналов выполнена не превышающей длину самого длинного из намеченных к применению эндоскопических инструментов;
навесные инструментальные каналы зафиксированы на клипсах-держателях по окружности гибкой рабочей части по часовому циферблату с возможностью обеспечения доступа эндоскопического инструмента к участку исследуемого или оперируемого органа;
при этом клипсы-держатели содержат ведущую клипсу-держатель, промежуточные клипсы-держатели и замыкающую клипсу-держатель, при этом внешняя поверхность всех клипс-держателей выполнена с продольными пазами с возможностью крепления навесных инструментальных каналов, при этом форма и размеры продольных пазов выполнены по типу замка zip lock с возможностью охвата «талии» шипа продольного;
при этом ведущая клипса-держатель выполнена в виде трубки с возможностью её натяжения на управляемый дистальный конец; конец ведущей клипсы-держателя, обращённый в сторону полости органа, выполнен в виде юбки без продольных пазов, при этом диаметр и длина юбки зависит от пропускной способности анального сфинктера или верхнего пищеводного сфинктера пациента и от вида эндоскопического вмешательства;
при этом промежуточные клипсы-держатели выполнены в виде витых пружин в количестве не менее двух с количеством витков от 1,5 до 3,5, при этом промежуточные клипсы-держатели расположены на гибкой рабочей части на равном удалении друг от друга;
при этом замыкающая клипса-держатель выполнена в виде желоба подковообразного сечения с возможностью фиксации на проксимальном конце гибкой рабочей части вплотную к рукоятке;
столешница-держатель выполнена произвольной формы с U-образной выемкой, сквозными отверстиями и приталенными пазами, при этом U-образная выемка выполнена соответствующей сечению рукоятки с возможностью фиксации столешницы-держателя к рукоятке, при этом сквозные отверстия и приталенные пазы выполнены по периметру столешницы-держателя с возможностью фиксации навесных инструментальных каналов, при этом размеры сквозных отверстий соответствуют внешнему диаметру навесных инструментальных каналов;
при этом элементы заявленного устройства соединены между собой следующим образом: навесные инструментальные каналы закреплены на гибкой рабочей части эндоскопа с помощью ведущей клипсы-держателя, промежуточных клипс-держателей и замыкающей клипсы-держателя, проксимальные концы навесных инструментальных каналов зафиксированы в сквозных отверстиях столешницы-держателя, которая закреплена на рукоятке.
2. Устройство для эндоскопии, состоящее из эндоскопа, не менее одного навесного инструментального канала, клипс-держателей, столешницы-держателя;
при этом эндоскоп содержит гибкую рабочую часть с управляемым дистальным концом, содержащую внутри штатные каналы: освещения, передачи изображения, комбинированный подачи воздуха и воды, размещения кинематики; рукоятку с расположенными на ней ручками принудительного управления механизмами привода управляемого дистального конца гибкой рабочей части, кнопку подачи воздуха и воды, соединительный кабель;
при этом навесные инструментальные каналы выполнены в виде трубок из диэлектрического материала, разрешённого к применению в медицине, инертного, не разрушающегося при дезинфекции, упругоэластичного, прочного на разрыв,
при этом дистальные концы навесных инструментальных каналов выполнены атравматичными – скошенными или закруглёнными, а проксимальные концы выполнены в виде воронки с возможностью введения в навесные инструментальные каналы эндоскопических инструментов и оснащены эластичным клапаном с возможностью предупреждения утечки раздувающего газа в виде двух встречно размещённых эластичных мембран, причём каждая из мембран одним краем присоединена к краю проксимального конца навесного инструментального канала, а свободные края мембран плотно и внахлёст прилегают друг к другу, заходя одна за другую с возможностью перекрывания просвета навесного инструментального канала и предупреждения утечки раздувающего газа из оперируемой полости, а также с возможностью пропускания эндоскопического инструмента путём охвата его в виде манжеты;
по всей длине наружной поверхности каждого навесного инструментального канала монолитно с ним выполнен шип продольный в виде выступа таким образом, что место соединения навесного инструментального канала и шипа продольного выполнено зауженным в виде «талии» с возможностью фиксации навесного инструментального канала в клипсах-держателях;
при этом длина навесных инструментальных каналов выполнена не превышающей длину самого длинного из намеченных к применению эндоскопических инструментов;
навесные инструментальные каналы зафиксированы на клипсах-держателях по окружности гибкой рабочей части по часовому циферблату с возможностью обеспечения доступа эндоскопического инструмента к участку исследуемого или оперируемого органа;
при этом клипсы-держатели содержат ведущую клипсу-держатель, промежуточные клипсы-держатели и замыкающую клипсу-держатель, при этом внешняя поверхность всех клипс-держателей выполнена с продольными пазами с возможностью крепления навесных инструментальных каналов, при этом форма и размеры продольных пазов выполнены по типу замка zip lock с возможностью охвата «талии» шипа продольного;
при этом ведущая клипса-держатель выполнена в виде трубки с возможностью её натяжения на управляемый дистальный конец; конец ведущей клипсы-держателя, обращённый в сторону полости органа, выполнен в виде юбки без продольных пазов, при этом диаметр и длина юбки зависит от пропускной способности анального сфинктера или верхнего пищеводного сфинктера пациента и от вида эндоскопического вмешательства;
при этом промежуточные клипсы-держатели выполнены в виде витых пружин в количестве не менее двух с количеством витков от 1,5 до 3,5, при этом промежуточные клипсы-держатели расположены на гибкой рабочей части на равном удалении друг от друга;
при этом замыкающая клипса-держатель выполнена в виде желоба подковообразного сечения с возможностью фиксации на проксимальном конце гибкой рабочей части вплотную к рукоятке;
столешница-держатель выполнена произвольной формы с U-образной выемкой, сквозными отверстиями и приталенными пазами, при этом U-образная выемка выполнена соответствующей сечению рукоятки с возможностью фиксации столешницы-держателя к рукоятке, при этом сквозные отверстия и приталенные пазы выполнены по периметру столешницы-держателя с возможностью фиксации навесных инструментальных каналов, при этом размеры сквозных отверстий соответствуют внешнему диаметру навесных инструментальных каналов;
при этом элементы заявленного устройства соединены между собой следующим образом: навесные инструментальные каналы закреплены на гибкой рабочей части эндоскопа с помощью ведущей клипсы-держателя, промежуточных клипс-держателей и замыкающей клипсы-держателя, проксимальные концы навесных инструментальных каналов зафиксированы в сквозных отверстиях столешницы-держателя, которая закреплена на рукоятке.
3. Устройство для эндоскопии по п.1 и 2, отличающееся тем, что шип продольный выполнен доходящим до кончика дистального конца и не доходящим до края проксимального конца навесного инструментального канала.
4. Устройство для эндоскопии по п.1 и 2, отличающееся тем, что шип продольный выполнен не доходящим до кончика дистального и края проксимального концов навесного инструментального канала.
5. Устройство для эндоскопии по п.1 и 2, отличающееся тем, что юбка ведущей клипсы-держателя выполнена с одной циркулярной бороздой по краю внешней поверхности юбки с возможностью фиксации эндоскопического инструмента.
6. Устройство для эндоскопии по п.1 и 2, отличающееся тем, что юбка ведущей клипсы-держателя выполнена без циркулярной борозды.
7. Способ использования устройства для эндоскопии по п.1, заключающийся в том, что
берут заявленное устройство за рукоятку и вводят в исследуемый или оперируемый полый орган пациента гибкую рабочую часть, оснащённую навесными инструментальными каналами, закреплёнными на клипсах-держателях и столешнице-держателе;
для проведения диагностики осматривают и диагностируют обследуемый орган пациента с использованием штатного оснащения эндоскопа и не менее одного навесного инструментального канала, для чего сначала через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем навесной инструментальный канал подсоединяют к аквапуратору для подачи воды под давлением, подают воду и отмывают слизистую оболочку от биологических загрязнений, а через штатный рабочий аспирационно-инструментальный/биопсийный канал проводят аспирацию промывных вод и биологических жидкостей; проводят диагностику и по ее результатам определяют программу лечения;
для проведения лечения через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем дистальный конец гибкой рабочей части подводят к месту производства лечебных действий, через навесные инструментальные каналы в количестве не менее одного вводят эндоскопические инструменты, в случае использования двух и более навесных инструментальных каналов их либо используют полностью, либо часть оставляют свободными для резерва, штатный рабочий аспирационно-инструментальный/биопсийный канал либо оставляют свободным для подачи воды и аспирации промывных вод и биологических жидкостей, либо используют для введения эндоскопического инструмента; затем с введёнными эндоскопическими инструментами выполняют лечебные действия;
при возникновении потребности отработавший эндоскопический инструмент извлекают из навесных инструментальных каналов и штатного рабочего аспирационно-инструментального/биопсийного канала и вместо него вводят ситуативно необходимый эндоскопический инструмент, не извлекая гибкую рабочую часть из полого органа пациента, взаимоперемещают эндоскопические инструменты между собой, изменяют угол «атаки» эндоскопических инструментов, работают эндоскопическими инструментами одновременно;
по завершении лечебных действий из штатного рабочего аспирационно-инструментального/биопсийного канала и навесных инструментальных каналов поочерёдно удаляют эндоскопические инструменты, затем удаляют воздух из внутреннего операционного пространства, после чего удаляют заявленное устройство, завершая медицинское вмешательство.
8. Способ использования устройства для эндоскопии по п.2, заключающийся в том, что
берут заявленное устройство за рукоятку и вводят в исследуемый или оперируемый полый орган пациента гибкую рабочую часть, оснащённую навесными инструментальными каналами, закреплёнными на клипсах-держателях и столешнице-держателе;
для проведения диагностики осматривают и диагностируют обследуемый орган пациента с использованием штатного оснащения эндоскопа и не менее одного навесного инструментального канала, для чего сначала через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем навесной инструментальный канал подсоединяют к аквапуратору для подачи воды под давлением, подают воду и отмывают слизистую оболочку от биологических загрязнений, затем аквапуратор отсоединяют от навесного инструментального канала и подсоединяют аспиратор и через навесной инструментальный канал проводят аспирацию промывных вод и биологических жидкостей; проводят диагностику и по результатам диагностики определяют программу лечения;
для проведения лечения через штатный канал подачи воздуха и воды инсуффлируют воздух для раздувания просвета органа и создания внутреннего операционного пространства, затем дистальный конец гибкой рабочей части подводят к месту производства лечебных действий, через навесные инструментальные каналы в количестве не менее одного вводят эндоскопические инструменты, в случае использования двух и более навесных инструментальных каналов их либо используют полностью, либо часть оставляют свободными для резерва, затем с введёнными в навесные инструментальные каналы эндоскопическими инструментами выполняют лечебные действия;
при возникновении потребности отработавший эндоскопический инструмент извлекают из навесных инструментальных каналов и вместо него вводят ситуативно необходимый эндоскопический инструмент, не извлекая гибкую рабочую часть из полого органа пациента, взаимоперемещают эндоскопические инструменты между собой, изменяют угол «атаки» эндоскопических инструментов, работают эндоскопическими инструментами одновременно;
по завершении лечебных действий из навесных инструментальных каналов поочерёдно удаляют эндоскопические инструменты, затем удаляют воздух из внутреннего операционного пространства, после чего удаляют заявленное устройство, завершая медицинское вмешательство.
9. Способ использования устройства для эндоскопии по любому из пп. 7, 8, отличающийся тем, что ситуативно необходимый эндоскопический инструмент выбирают по меньшей мере из ряда: биопсийные щипцы, инжектор, электрохирургическая петля, щипцы типа «крысиный зуб», клипатор.
| WO 2022172321 A1, 18.08.2022 | |||
| WO 2018084730 A1, 11.05.2018 | |||
| WO 2020087191 A1, 07.05.2020 | |||
| US 2009198212 A1, 06.08.2009 | |||
| Хацевич Т.Н | |||
| Эндоскопы: учебн | |||
| пособие/ Т.Н.Хацевич, И.О.Михайлов | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и расш | |||
| - Новосибирск: СГГА, 2012. | |||
