Изобретение относится к оптике, в частности к устройствам для управления направлением отклонения оптических лучей и может быть использовано для коррекции углов наклона волнового фронта в адаптивных оптических системах, применяемых в астрономии, системах видения в турбулентной атмосфере, при управлении лазерным лучом в сканирующих системах.
Известна адаптивная оптическая система для стабилизации изображения фрагмента изображения солнечного диска на входной щели спектрографа, которая описана в статье [Экспериментальная адаптивная оптическая система для Большого солнечного вакуумного телескопа. Эффективность стабилизации фрагмента изображения солнечного диска на входной щели спектрографа Л.В. Антошкин, Н.Н. Ботыгина, О.Н. Емалеев, Л.Н. Лавринова, В.П. Лукин, А.И. Петров, Б.В. Фортес, А.П. Янков // Оптика атмосферы и океана. 2000. Т. 13. №4. С. 420-423]. Система состоит из входного объектива, оптического дефлектора, фотоприемного устройства в виде четырехквадрантного фотодиода, блока вычисления смещения изображения и системы регистрации изображения. Оптическое излучение проходит через объектив телескопа, затем отражается от управляемого зеркала дефлектора, и фокусируется на фотоприемном устройстве, где измеряется смещение изображения солнечного диска. Смещение обусловлено турбулентной атмосферой.
Блоком управления по координатам Х, У регистрируется сигнал отклонения светового пятна относительно центра фотоприемника, который изменяет угол наклона зеркала дефлектора и возвращает изображение в исходное положение, при этом системой регистрации изображения в плоскости наблюдения фиксируется устойчивое изображение.
Недостатком данной системы является то, что устройство для коррекции турбулентных искажений оптического излучения представляет собой динамическую систему с постоянным временем запаздывания корректирующего сигнала относительно текущего состояния атмосферы. Время запаздывания складывается из времени обработки информации, полученной четырехквадрантным фотоприемником, времени вычисления управляющих воздействий на адаптивное зеркало, времени отработки зеркала, включающее инерционность и переходные процессы механической конструкции данного зеркала. Таким образом, угол наклона корректирующей поверхности адаптивного зеркала устанавливается в соответствии с углом наклона волнового фронта оптического излучения, присутствующего на входной апертуре адаптивной системы, заведомо с опозданием на величину, определяющую время запаздывания системы. Это снижает точность и качество коррекции. Также точность измерения смещения четырехквадрантным фотоприемником зависит от размера и формы изображения на фотоприемнике, постоянно изменяющихся в турбулентной атмосфере. Отсутствие синхронизации в работе оптической адаптивной системы и регистрирующей видеокамеры не позволяет полностью устранить дрожание изображения, а траектория смещения пучка имеет ступенчатый характер.
В статье [Методы опережающего формирования фазовой поверхности на основе измерений датчика Шэка-Гартмана, Л.В. Антошкин, В.В. Лавринов, Л.Н. Лавринова, В.П. Лукин // Оптика атмосферы и океана. 2011. Т. 24. №11. С. 979-984] описана возможность повышения точности коррекции при управлении гибкими зеркалами в оптических системах с опережающей коррекцией, за счет коррекции мелкомасштабных абераций волнового фронта. Движение оптических неоднородностей турбулентной атмосферы на входной апертуре датчика волнового фронта Шека-Гартмана определяет перемещение центроидов в плоскости регистрации. Для анализа изменения траектории их движения использован метод разложения функции движения центроидов в ряд Тейлора и вычисление координаты их прогнозируемого положения и локальных наклонов волнового фронта в момент следующего кадра.
Однако применение данного способа не позволяет работать в динамических оптических системах с замкнутой обратной связью, поскольку при изменении угла поворота зеркал корректирующего устройства в первом же шаге работы системы, текущие координаты центроидов изменяются, а для расчета координат по формуле Тейлора требуется как минимум три последовательных измерения. в одной и той же системе координат.
Задачей заявляемого изобретения является создание оптической следящей системы с опережающей коррекцией при формировании сигнала управления двухкоординатным оптическим дефлектором, уменьшающей ошибку коррекции, связанную с постоянным временем запаздывания корректирующего дефлектора и минимизации ошибки из-за смещения изображения на входной апертуре адаптивной оптической системы, вызванного турбулентной атмосферой и получения минимально искаженного изображения за счет уменьшения его дрожания с частотой кадров видеокамеры.
Технический результат заключается в регистрации изображения в адаптивной оптической системе повышенной точности и не имеющей времени запаздывания корректирующего сигнала, относительно текущего состояния атмосферы, за счет опережающей установки угла наклона зеркала корректирующего дефлектора.
Заявляемое устройство улучшает точность адаптивных оптических систем для коррекции углов наклона волнового фронта в астрономии, системах видения в турбулентной атмосфере, управлении лазерным лучом в сканирующих системах.
Поставленная задача заявляемого изобретения достигается тем, что для решения проблемы запаздывания коррекции положения изображения в адаптивной оптической системе и повышения точности предлагается способ и устройство стабилизации в турбулентной среде изображения на приемной матрице видеокамеры адаптивной оптической системы с прогнозированием изменения угла наклона волнового фронта на входной апертуре объектива, т.е. с опережающей коррекцией, расчитаной по измерениям текущего угла наклона волнового фронта на входной апертуре объектива и установкой наклона корректирующего зеркала дефлектора в положение, которое будет соответствовать наклону волнового фронта на момент следующего информационного кадра видеокамеры.
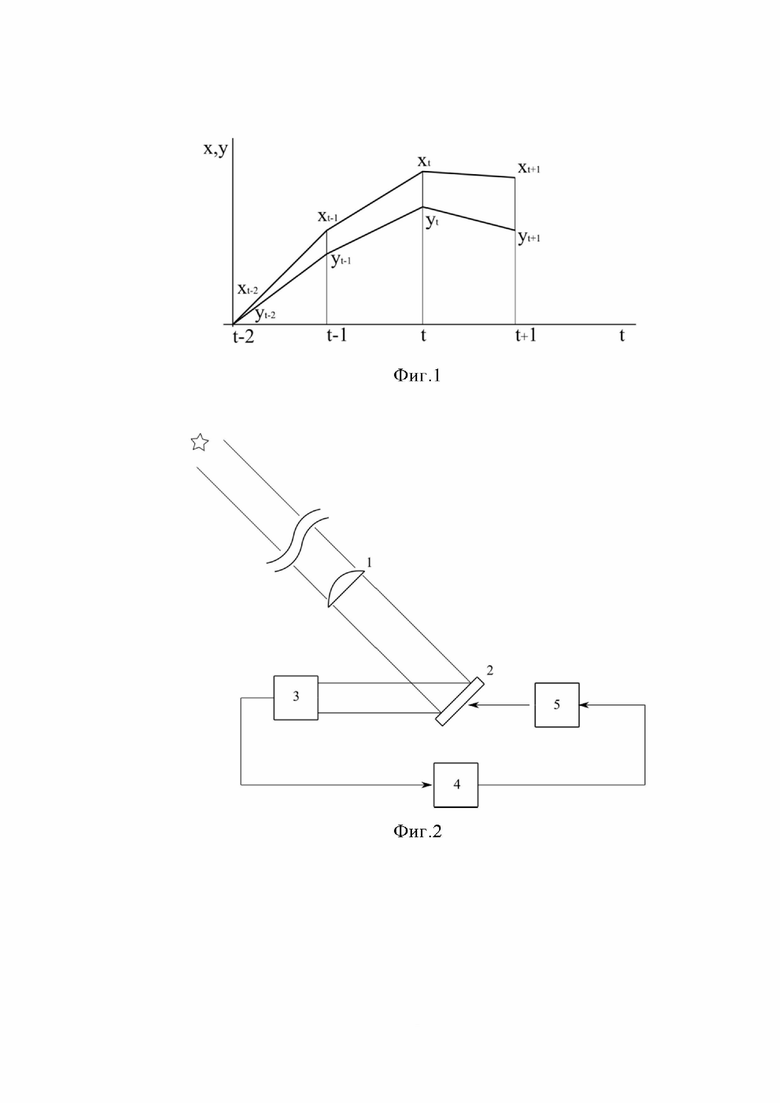
Суть заявляемого изобретения заключается в том, что в следящей оптической системе, содержащей видеокамеру, положение принимаемого изображения, прошедшего через турбулентную атмосферу, в реальном времени регистрируется равномерными циклами по N кадров в цикле. Временная диаграмма цикла работы оптической следящей системы приведена на (фиг. 1).
Оптическая система настраивается таким образом, чтобы изображение исследуемого объекта находилось в центре фотоприемной матрицы видеокамеры. Первые кадры каждого цикла являются основными информационными. Координатам Х, У изображения первого кадра присваивается значение ноль в системе координат фотоприемной матрицы видеокамеры. К координатам этой точки матрицы изображение будет устанавливаться по окончании каждого цикла. Второй и третий кадры цикла являются вспомогательными при вычислении сигнала опережающей коррекции. Например, на фиг. 1 число кадров в цикле принято 3 (N=3), так как это обеспечивает достаточную точность и быстродействие, но N может быть принято более 3-х, с соответствующим изменением формул расчета по Тейлору (1) и (2) , что повышает точность вычисления.
По измерениям смещений промежуточных положений изображения на матрице видеокамеры по всем заданным N кадрам текущего цикла рассчитывается траектория смещения изображения, определяемая изменением углов наклона волнового фронта турбулентной атмосферы, и ожидаемое в связи с этим смещение положения изображения по координатам  ,
,  задается в первом кадре следующего цикла. Рассчитанный сигнал ожидаемого смещения поступает на дефлектор, который предварительно после последнего кадра каждого цикла устанавливает угол поворота корректирующего зеркала и компенсирует угол наклона входящего волнового фронта таким образом, чтобы в момент предстоящего очередного первого кадра следующего цикла положение изображения в будущем кадре совпадало с положением изображения на матрице видеокамеры во всех первых информационных кадрах предыдущих циклов. Это обеспечивает аннигиляцию смещения по координатам Х, У и дрожания изображения наблюдаемого объекта, вызванных атмосферной турбулентностью, что позволяет без дополнительной обработки в реальном времени с достаточной точностью анализировать изображение наблюдаемого объекта и отслеживать его положение
задается в первом кадре следующего цикла. Рассчитанный сигнал ожидаемого смещения поступает на дефлектор, который предварительно после последнего кадра каждого цикла устанавливает угол поворота корректирующего зеркала и компенсирует угол наклона входящего волнового фронта таким образом, чтобы в момент предстоящего очередного первого кадра следующего цикла положение изображения в будущем кадре совпадало с положением изображения на матрице видеокамеры во всех первых информационных кадрах предыдущих циклов. Это обеспечивает аннигиляцию смещения по координатам Х, У и дрожания изображения наблюдаемого объекта, вызванных атмосферной турбулентностью, что позволяет без дополнительной обработки в реальном времени с достаточной точностью анализировать изображение наблюдаемого объекта и отслеживать его положение
Реализация заявляемого изобретения достигается тем, что оптическая следящая система с опережающей коррекцией. Блок-схема оптической следящей системы с опережающей коррекцией приведена на фиг. 2, содержит:
- входной объектив (1);
- оптический дефлектор (2);
- видеокамеру (3);
- блок управления оптической системой (4);
- блок управления дефлектором (5).
Устройство работает следующим образом:
Работа устройства осуществляется циклами по результатам N измерений видеокамеры в цикле. В приведенных примерах рассчитывается величина опережающей коррекции для циклов из трех измерений, что обеспечивает достаточную точность слежения.
Оптическое излучение, проходит через объектив (1), отражается от управляемого зеркала дефлектора (2) и фокусируется на матрице видеокамеры (3), где регистрируется текущее положение изображения стабилизируемого объекта.
Изображения трех кадров цикла последовательно записываются в блок управления оптической системой (4), где вычисляются прогнозируемые значения  и
и  .
.
На фиг. 1 показан пример изменения значения смещения по Х, У координат входящего изображения в соответствующих трех кадрах цикла, а также значения величины опережающей коррекции по координатам Х, У изображения в кадре №1 следующего цикла, где:
 - время основного информационного кадра №1 в цикле;
- время основного информационного кадра №1 в цикле;
 - время кадра №2 в цикле;
- время кадра №2 в цикле;
 - время последнего кадра №3 в цикле;
- время последнего кадра №3 в цикле;
 - является также временем основного информационного кадра №1 в следующем цикле;
- является также временем основного информационного кадра №1 в следующем цикле;
 , ,
, , ,
,  - значения смещения по Х, У координат изображения в соответствующих кадрах №1, №2, №3;
- значения смещения по Х, У координат изображения в соответствующих кадрах №1, №2, №3;
 ,
,  - рассчитанные ожидаемые значения величины опережающей коррекции по Х, У координат изображения.
- рассчитанные ожидаемые значения величины опережающей коррекции по Х, У координат изображения.
Величина опережающего угла наклона зеркала корректирующего дефлектора рассчитывается по формуле Тейлора, приведенной к виду:


Значения ожидаемых координат смещения изображения по Х, У суммируются с результатами конечных приращений во всех предыдущих циклах. Полученные результаты поступают на блок управления дефлектором (5), где формируется напряжение управления пьезокерамическими актюаторами дефлектора (2). Под воздействием управляющего напряжения зеркало дефлектора изменяет угол наклона, и устанавливает изображение на фотоприемной матрице в положение, соответствующее первому кадру следующего цикла.
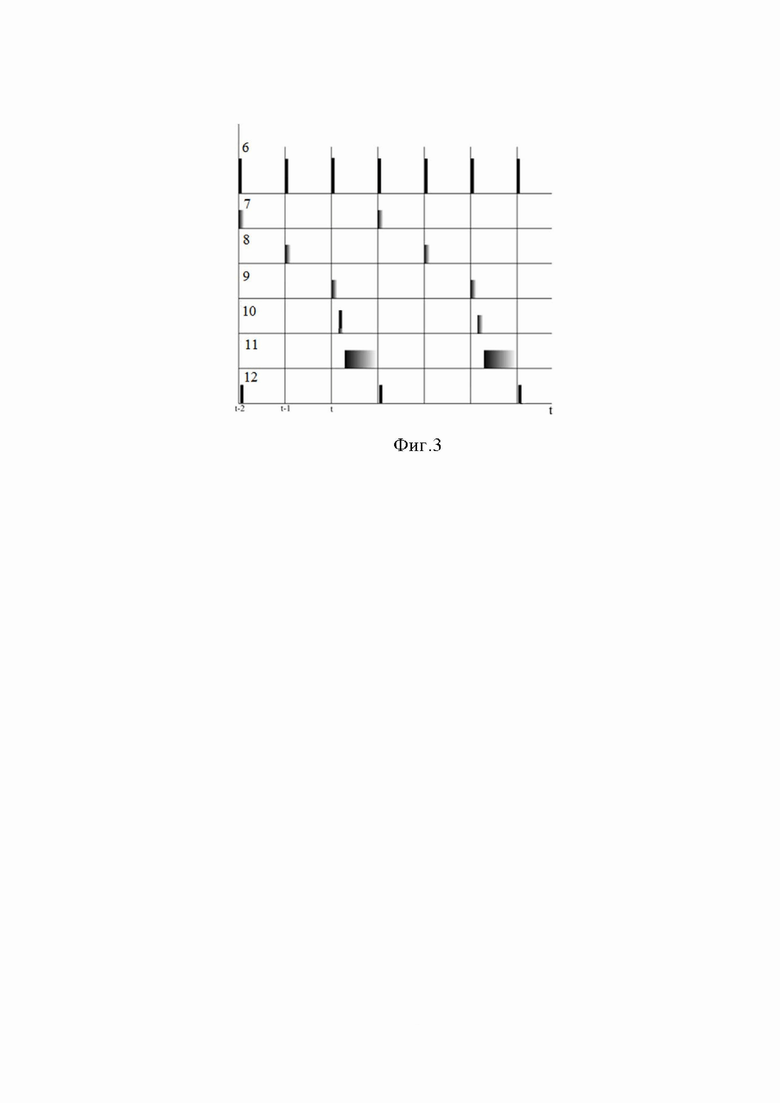
Работа следящей оптической системы отражена на временной диаграмме процессов в оптической следящей системе (фиг. 3), где:
6 - получение кадров с видео камеры;
7 - вычисление координат Х, У изображения в кадре №1 цикла;
8 - вычисление координат Х, У изображения кадре №2 цикла;
9 - вычисление координат Х, У изображения в кадре №3 цикла;
10 - вычисление величины  ,
,  - значения опережающей коррекции по Х, У;
- значения опережающей коррекции по Х, У;
11 - установка угла поворота зеркала дефлектора;
12 - запись первых кадров изображений в блок регистрации для формирования видеозаписи наблюдаемого объекта.
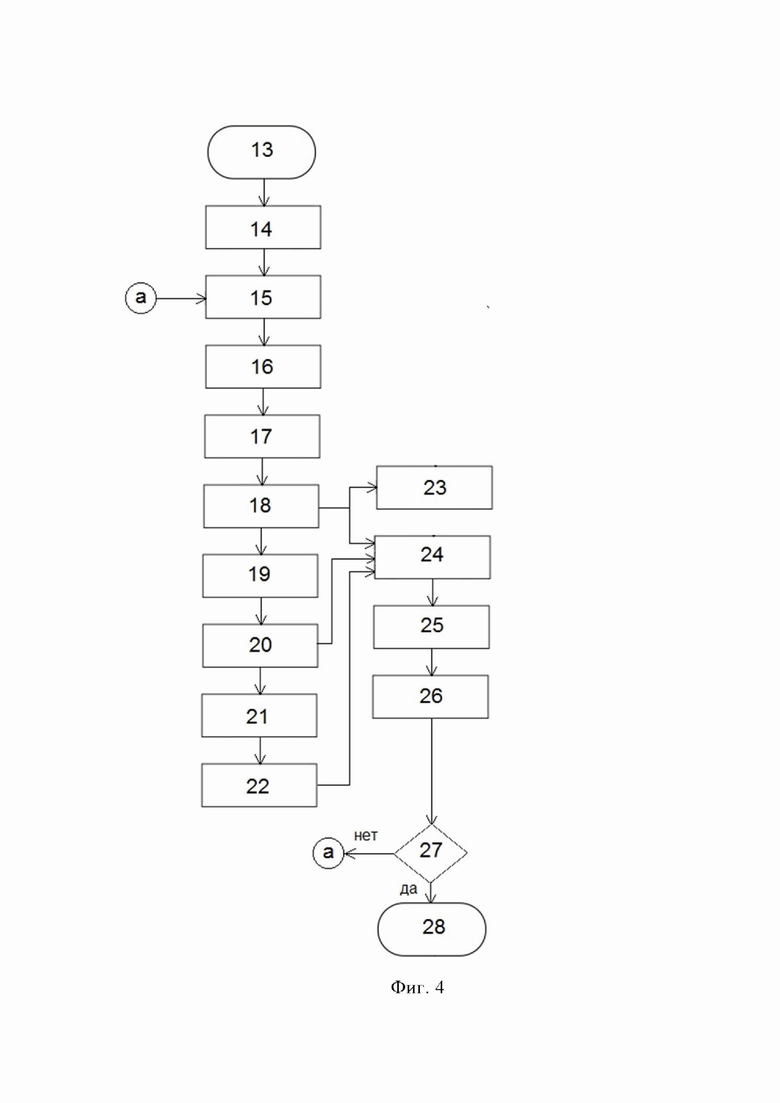
Алгоритм работы блока управления оптической системой (4) приведен на фиг. 4, где:
13 - начало работы;
14 - инициализация блока управления;
15 - запуск видео камеры;
16 - прием кадра ;
17 - вычисление координат Х, У изображения в кадре ;
18 - присвоение точке объекта координат Х=0, У=0;
19 - прием кадра  ;
;
20 - вычисление координат Х, У изображения в кадре  ;
;
21 - прием кадра  ;
;
22 - вычисление координат Х, У изображения в кадре ;
23 - визуализация всех первых кадров;
24 - вычисление значений координат Х, У изображения на предстоящий момент времени ;
25 - суммирование с инверсией значения координат Х, У у изображения в момент времени с суммой конечных приращений в предыдущих циклах;
26 - расчет и подача на дефлектор управляющих напряжений для времени ;
27 - конец цикла;
28 - конец;
а - символ отображает выход в часть схемы и вход из другой части этой схемы и используется для обрыва линии и продолжения ее в другом месте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная оптическая следящая система с контуром опережающей коррекции | 2023 |
|
RU2799987C1 |
| Способ и устройство для измерения поперечной составляющей скорости ветра и турбулентности атмосферы на основе датчика Шэка-Гартмана | 2024 |
|
RU2835780C1 |
| Способ и устройство эмуляции атмосферной турбулентности для настройки и тестирования адаптивных оптических систем | 2022 |
|
RU2788312C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ВОЛНОВОГО ФРОНТА НА ОСНОВЕ СВЕТОВОГО ПОЛЯ | 2022 |
|
RU2808933C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТНОГО ПРОФИЛЯ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ВОЗДУХА ОБЪЕМНОЙ ОБЛАСТИ ПРОСТРАНСТВА НА ОСНОВЕ АНАЛИЗА СВЕТОВОГО ПОЛЯ | 2020 |
|
RU2773390C2 |
| Устройство управления двухкоординатным пьезокерамическим оптическим дефлектором | 2018 |
|
RU2695281C1 |
| ФАЗОВАЯ КАМЕРА ДЛЯ ИЗМЕРЕНИЯ ИСКАЖЕНИЯ ВОЛНОВОГО ФРОНТА И РАССТОЯНИЯ | 2007 |
|
RU2421696C2 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2024 |
|
RU2823912C1 |
| СПОСОБ ИССЛЕДОВАНИЯ АТМОСФЕРНОЙ ТУРБУЛЕНТНОСТИ ПО АНАЛИЗУ МЕРЦАНИЯ ЗВЕЗД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2805129C1 |
Изобретение может быть использовано для коррекции углов наклона волнового фронта в адаптивных оптических системах, применяемых в астрономии, системах видения в турбулентной атмосфере, при управлении лазерным лучом в сканирующих системах. Способ с опережающей коррекцией в оптической системе с замкнутой обратной связью, содержащей видеокамеру, блок управления по координатам Х, У и зеркало дефлектора, в котором положение принимаемого изображения, прошедшее через турбулентную атмосферу, регистрируется равномерными циклами по N кадров текущего цикла, рассчитывается траектория смещения изображения, определяемая изменением углов наклона волнового фронта, и ожидаемое смещение положения изображения задается на первом кадре следующего цикла, рассчитанный сигнал поступает на дефлектор, который устанавливает угол поворота корректирующего зеркала таким образом, чтобы в момент очередного первого кадра следующего цикла положение изображения совпадало с положением изображения на матрице видеокамеры во всех первых информационных кадрах предыдущих циклов. Технический результат - повышение точности и исключение времени запаздывания корректирующего сигнала относительно текущего состояния атмосферы. 2 н.п. ф-лы, 4 ил.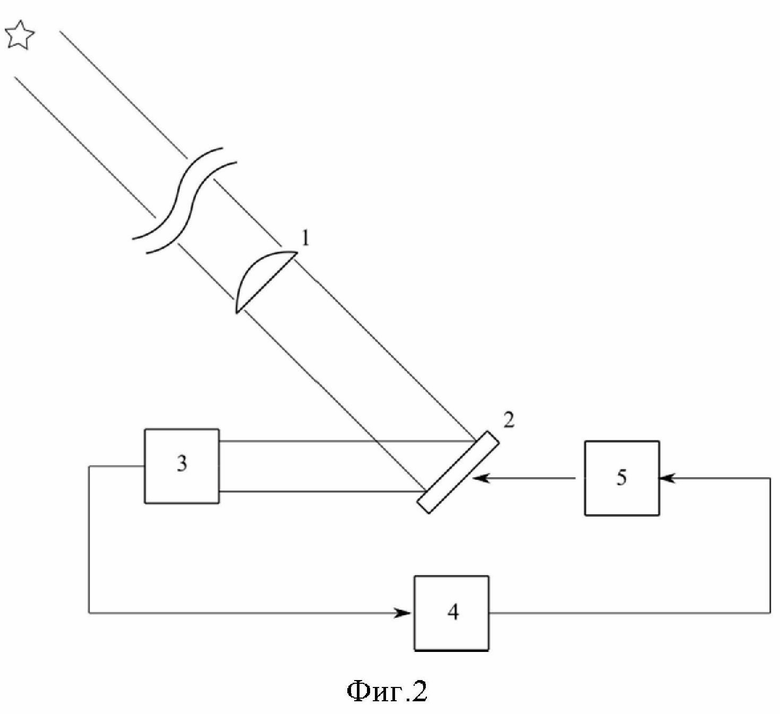
1. Способ с опережающей коррекцией в оптической системе с замкнутой обратной связью, содержащей видеокамеру, блок управления по координатам Х, У, зеркало дефлектора, отличающийся тем, что положение принимаемого изображения, прошедшего через турбулентную атмосферу, регистрируется равномерными циклами по N кадров текущего цикла, рассчитывается траектория смещения изображения, определяемая изменением углов наклона волнового фронта турбулентной атмосферы, и ожидаемое в связи с этим смещением положение изображения задается на первом кадре следующего цикла, рассчитанный сигнал поступает на дефлектор, который предварительно после каждого цикла устанавливает угол поворота корректирующего зеркала и компенсирует угол наклона входящего волнового фронта таким образом, чтобы в момент предстоящего очередного первого кадра следующего цикла положение изображения в будущем кадре совпадало с положением изображения на матрице видеокамеры во всех первых информационных кадрах предыдущих циклов.
2. Устройство с опережающей коррекцией с замкнутой обратной связью, состоящее из входного объектива, оптического дефлектора, видеокамеры, отличающееся тем, что в блоке управления оптической системой вычисляются координаты объекта во всех N кадрах цикла и значения приращений, которые в блоке управления дефлектором суммируются с результатами конечных приращений во всех предыдущих циклах для изменения угла наклона зеркала дефлектора.
| Л.В | |||
| Антошкин, Н.Н | |||
| Ботыгина, О.Н | |||
| Емалеев, Л.Н | |||
| Лавринова, В.П | |||
| Лукин, А.И | |||
| Петров, Б.В | |||
| Фортес, А.П | |||
| Янков | |||
| Экспериментальная адаптивная оптическая система для Большого солнечного вакуумного телескопа | |||
| Эффективность стабилизации фрагмента изображения солнечного диска на входной щели спектрографа, Оптика атмосферы и океана, 2000, т | |||
| Насос | 1917 |
|
SU13A1 |

