Изобретение относится к оптике, в частности, к устройствам регистрации изображений в оптических системах, управления направлением отклонения оптических лучей и может быть использовано для коррекции углов наклона волнового фронта в адаптивных оптических системах увеличенного быстродействия и повышенной точности, применяемых в астрономии, системах видения в турбулентной атмосфере в устройствах с ускоренным временем отработки следящей оптической системой изменений входного сигнала.
Известна адаптивная оптическая система для компенсации случайных угловых смещений изображения, вызванных действием атмосферной турбулентности, в которой измеряются координаты линейных смещений энергетического центра тяжести изображения в фокальной плоскости оптической системы, и вырабатываются сигналы управления, пропорциональные угловым смещениям, которые воздействуют на управляемое зеркало (дефлектор) таким образом, что поворотом зеркала компенсируются линейные смещения изображения в фокальной плоскости оптической системы, которая описана в статье [«Адаптивная оптическая система для коррекции искажений изображения» Л.В. Антошкин, Н.Н. Ботыгина, О.Н. Емалеев, В.П. Лукин, С.Ф. Потанин // Оптика атмосферы. 2, №6 (1989). С. 621-626]. Система состоит из передающей оптической части, атмосферной трассы, измерительного канала и канала коррекции. Передающая часть содержит лазерный источник, излучение которого формируется коллиматором и диафрагмой. Лазерный пучок, пройдя атмосферную трассу, на входе приемной системы делится на два пучка, которые посредством оптического клина направляются в измерительный канал и канал коррекции. В измерительном канале объективом строится изображение источника на четырех квадрантном координатно - чувствительном фотоприемнике и измеряются сигналы смещения изображения Ux, Uy, которые усиливаются инвертирующими усилителями и подаются на двух координатный пьезокерамический дефлектор. Таким образом, угол наклона поверхности зеркала дефлектора устанавливается в соответствии с углом наклона волнового фронта оптического излучения.
Недостатком данной системы является то, что при регистрации очередного кадра наклон зеркала дефлектора устанавливается с задержкой относительно корректируемых параметров, что в условиях турбулентной атмосферы снижает точность и качество коррекции.
Известен способ наиболее близкий к заявляемому изобретению «Способ и устройство с опережающей коррекцией в оптической системе с замкнутой обратной связью» Л.В. Антошкин, В.В. Лавринов, Л.Н. Лавринова, патент RU №2768541.
Устройство оптической следящей системы с опережающей коррекцией содержит:
- входной объектив;
- оптический дефлектор;
- видеокамеру;
- блок управления оптической системой;
- блок управления дефлектором.
Суть описанного изобретения заключается в том, что изображение пучка, принимаемого видеокамерой, регистрируется в реальном времени равномерными циклами по N кадров. При обработке координат пучка в каждом цикле по формуле Тейлора вычисляется траектория перемещения изображения пучка по матрице видеокамеры и координаты пучка в последнем кадре цикла, по которому вычисляются требуемые углы наклона зеркала дефлектора, обеспечивающие стабильное ожидаемое положение изображения на матрице видеокамеры.
Недостатком данного способа является снижение быстродействия следящей системы в N раз, вызванное тем, что на каждые N кадров видеокамеры приходится только один кадр с опережающим значением. Также наличие остаточного члена в формуле Тейлора приводит к наличию погрешности слежения.
Задачей заявляемого изобретения является создание адаптивной оптической следящей системы с дополнительным контуром опережающей коррекции ошибки угла наклона оптического пучка, вызванной постоянным временем запаздывания следящего корректирующего дефлектора, и минимизация ошибки коррекции из-за смещения регистрируемого изображения пучка на входной апертуре адаптивной оптической системы за время между кадрами, вызванного турбулентной атмосферой.
Технический результат заключается в регистрации изображения адаптивной оптической системой повышенной точности и не имеющего запаздывания регистрируемого изображения относительно текущего состояния атмосферы за счет опережающей установки угла наклона зеркала дополнительного корректирующего дефлектора регистрации в положение, при котором суммарный угол наклона зеркал обоих дефлекторов будет соответствовать углу наклона волнового фронта оптического пучка на входной апертуре на момент следующего кадра.
Заявляемое устройство улучшает точность адаптивных оптических систем для коррекции углов наклона волнового фронта в астрономии, системах видения в турбулентной атмосфере, управлении лазерным лучом в сканирующих системах, системах оптической связи за счет повышения их разрешающей способности и быстродействия. Задача заключается в том, что за счет опережающей установки угла наклона зеркала дополнительного корректирующего дефлектора в положение, при котором суммарный угол наклона зеркал обоих дефлекторов будет соответствовать углу наклона волнового фронта оптического пучка на входной апертуре на момент следующего кадра.
Суть заявляемого изобретения заключается в том, что следящая адаптивная оптическая система с опережающей коррекцией содержит два контура:
в первом контуре (слежения) с замкнутой обратной связью посредством поворота зеркала оптического дефлектора первого контура оптической системы осуществляется слежение и регистрация в реальном времени координат положения изображения, формируемого входной апертурой, обеспечивающие их стабилизацию на фото приемной матрице видеокамеры первого контура;
во втором контуре (коррекции) дефлектором осуществляется коррекция положения изображения на фото приемной матрице регистрирующей видеокамеры второго контура с компенсацией ошибки смещения, вызванной временной задержкой первого контура системы. В результате в момент регистрации каждого кадра видеокамерой второго контура суммарный угол наклона зеркал, последовательно установленных дефлекторов оптической системы, равен углу наклона волнового фронта на ее входной апертуре, что обеспечивает точность регистрации принимаемого изображения без отставания во времени.
Способ опережающей коррекции в оптической следящей системе с контуром, содержащим объектив, видеокамеру, блок управления по координатам Х, У, дефлектор и блок управления дефлектором отличается тем, что добавлен светоделительный кубик, контур с дефлектором и видеокамерой слежения, причем направление осей Х, У видеокамер и поворота зеркал обоих дефлекторов в пространстве полностью совпадают; принимаемое видеокамерой контура слежения изображение наблюдаемого пучка, прошедшего через турбулентную атмосферу, регистрируется равномерными кадрами, по которым рассчитываются координаты изображения на матрице видеокамеры контура слежения и запоминаются в регистре сдвига координат пучка блока управления системы; по ним относительно координаты нуля матрицы видеокамеры слежения рассчитывается перемещение наблюдаемого пучка и изменение углов наклона волнового фронта в турбулентной атмосфере; рассчитанный сигнал поступает на дефлектор контура слежения, который устанавливает угол поворота зеркала дефлектора и компенсирует смещение изображения на фото приемной матрице в последнем кадре по координатам Х, У изображения за последние N кадров, хранящимся в регистре сдвига; рассчитывается ожидаемое положение изображения пучка в будущем кадре; устанавливается угол наклона зеркала дефлектора коррекции так, чтобы положение изображения в будущем кадре совпало с положением изображения на матрице видеокамеры контроля в предыдущих кадрах.
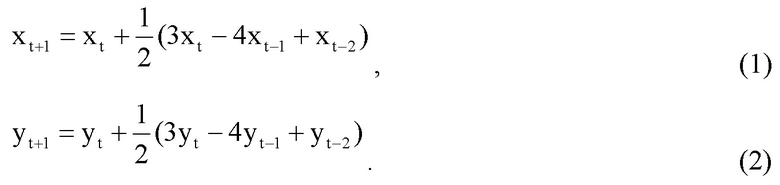
Временная диаграмма углов наклона оптических пучков по координате Y во время работы оптической следящей системы приведена на фиг. 1, где
1 - наклон волнового фронта на входной апертуре системы;
2 - угол наклона зеркала дефлектора первого контура;
3 - угол наклона зеркала дефлектора второго контура.
Временная ось показана со сдвигом на время одного кадра, где:
t - время последнего кадра №1;
t-1 - время кадра №2;
t-2 - время кадра №3;
t+1 - время следующего кадра.
Аналогично функционирует устройство и по координате Х.
Работа устройства осуществляется идентичными циклами, сдвинутыми во времени на один кадр (фиг. 2).
Оптическая система настраивается таким образом, чтобы изображение исследуемого объекта находилось в центре фото приемной матрицы видеокамеры первого контура. Координатам X, Y изображения первого кадра присваивается значение ноль в системе координат фото приемной матрицы видеокамеры. Оптическое излучение проходит через объектив (4), отражается от управляемого зеркала дефлектора (5) и фокусируется на матрице видеокамеры (8) первого контура, где регистрируется текущее положение изображения наблюдаемого объекта. К координатам этой точки на матрице изображение будет устанавливаться по завершении каждого такта измерения координат входящего изображения и поворота зеркала дефлектора, корректирующего положения принимаемого изображения. Значения координат X,Y изображения, вычисленные в каждом кадре, последовательно запоминаются в регистре сдвига блока управления устройством.
Вторая нижняя ось графика  описывает значения смещения по Х, У координатам изображения в соответствующих кадрах №1, №2 следующего цикла со сдвигом на один кадр во времени;
описывает значения смещения по Х, У координатам изображения в соответствующих кадрах №1, №2 следующего цикла со сдвигом на один кадр во времени;  , - рассчитанные ожидаемые значения величины опережающей коррекции по координате У изображения.
, - рассчитанные ожидаемые значения величины опережающей коррекции по координате У изображения.
Вычисление опережающих значений координат энергетических центров тяжести фокального пятен на матрице видеокамеры (8) осуществляется по модифицированным формулам Тейлора разложения в ряд функции точки, приведенным к виду:
Количество кадров должно быть не менее 3 (N = 3), что обеспечивает достаточную точность и быстродействие, но N может быть принято более 3-х, с соответствующим изменением формул расчета по Тейлору (1) и (2), что повышает точность вычисления.
По измерениям положения изображения на матрице видеокамеры (8) первого контура рассчитывается сигнал управления дефлектором первого контура  в противофазе углу наклона волнового фронта на входной апертуре оптической системы, стабилизирующий положение изображения на матрице видеокамеры (8) первого контура, а по координатам предыдущих N кадров регистра сдвига рассчитывается траектория смещения изображения, определяемая изменением углов наклона волнового фронта в турбулентной атмосфере, и ожидаемое в связи с этим смещение положения изображения в следующем кадре.
в противофазе углу наклона волнового фронта на входной апертуре оптической системы, стабилизирующий положение изображения на матрице видеокамеры (8) первого контура, а по координатам предыдущих N кадров регистра сдвига рассчитывается траектория смещения изображения, определяемая изменением углов наклона волнового фронта в турбулентной атмосфере, и ожидаемое в связи с этим смещение положения изображения в следующем кадре.
Дефлектором второго контура формируется угол наклона зеркала, корректирующего смещение изображения, вызванное запаздыванием по времени коррекции первого канала, обусловленное запаздыванием дефлектора.
Реализация заявляемого изобретения достигается тем, что оптическая следящая система с опережающей коррекцией содержит:
- входной объектив (4);
- дефлектор первого контура (5);
- блок управления дефлектором (6);
- кубик светоделительный (7);
- видеокамеру слежения (8);
- блок управления устройством (9);
- дефлектор второго контура (10);
- масштабирующее устройство (11);
- видеокамеру контроля (12);
- блок управления дефлектором (10) соответствует (13).
Блок-схема оптической следящей системы с контуром опережающей коррекции приведена на фиг. 2.
Устройство работает следующим образом.
Оптическое излучение, проходит через объектив (4), отражается от управляемого зеркала дефлектора (5) первого контура, проходит через светоделительный кубик (7) и фокусируется на матрице видеокамеры слежения (8), где регистрируется текущее положение стабилизируемого изображения пучка. Координаты изображения оптического пучка запоминаются в регистре блока управления устройством (9), где вычисляются управляющие воздействия, которые поступают в регистр сдвига и на блок управления (6) дефлектором (10), который корректирует отклонение пучка в первом контуре. По координатам изображений последних трех кадров, сохраненных в сдвиговом регистре блока управления (9), рассчитываются по формулам Тейлора управляющие сигналы, поступающие на дефлектор (10) второго контура через блок управления (13).
Вторая ветвь оптического пучка отражается от дефлектора (10), проходит через масштабирующее устройство (11), представляющее систему линз и изменяющее диаметр пучка, фокусируется на матрице видеокамеры контроля (12), где в реальном времени регистрируется текущее положение стабилизированного изображения пучка.
Время установления режима слежения (после включения системы) определяется частотой кадров видеокамер и равно суммарному времени трех кадров (при значении N=3).
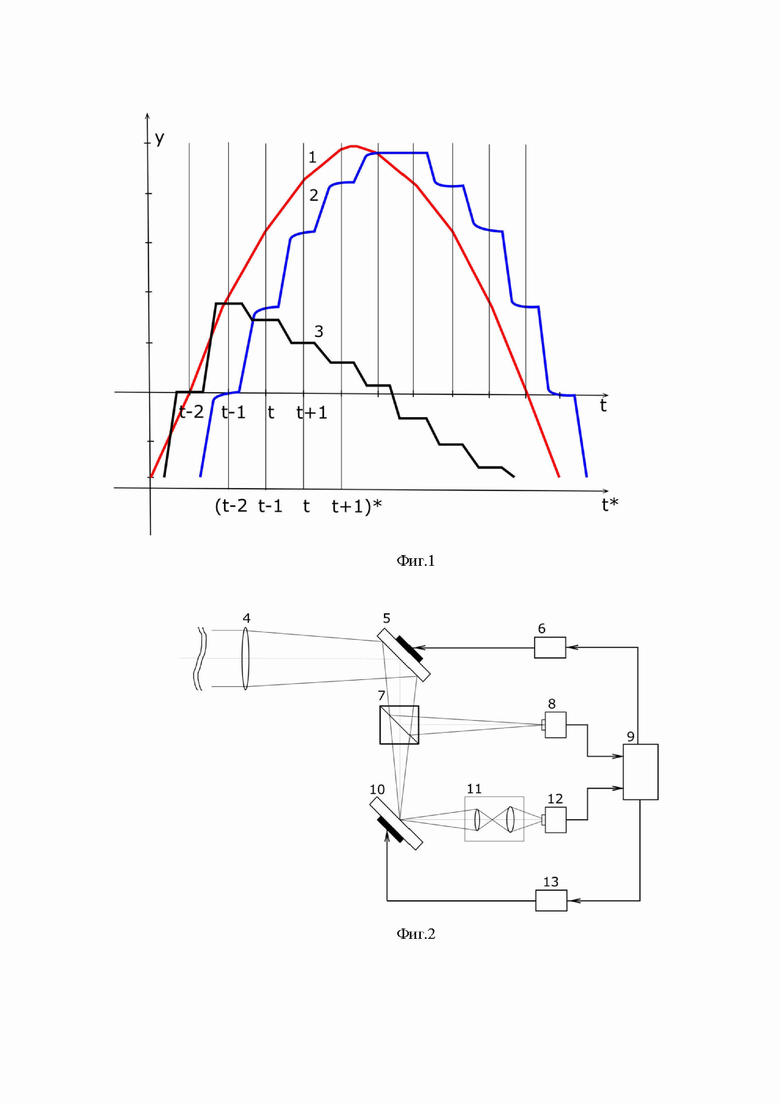
Работа следящей оптической системы отражена на временной диаграмме процессов в оптической следящей системе на фиг. 3, где:
- прием кадра с видеокамеры слежения (8) соответствует (14);
- вычисление координат Х, У изображения в кадре видеокамеры слежения (8) соответствует (15);
- запись координат Х, У в регистр сдвига блока управления соответствует (16);
- вычисление и установка угла наклона корректирующего дефлектора (5) соответствует (17);
- вычисление угла поворота дефлектора (10) опережающей коррекции соответствует (18);
- установка угла поворота дефлектора (10) соответствует (19);
- прием кадра с опережающей коррекцией с видеокамеры контроля (12) соответствует (20);
- передача стабилизированного изображения на внешние устройства соответствует (21).
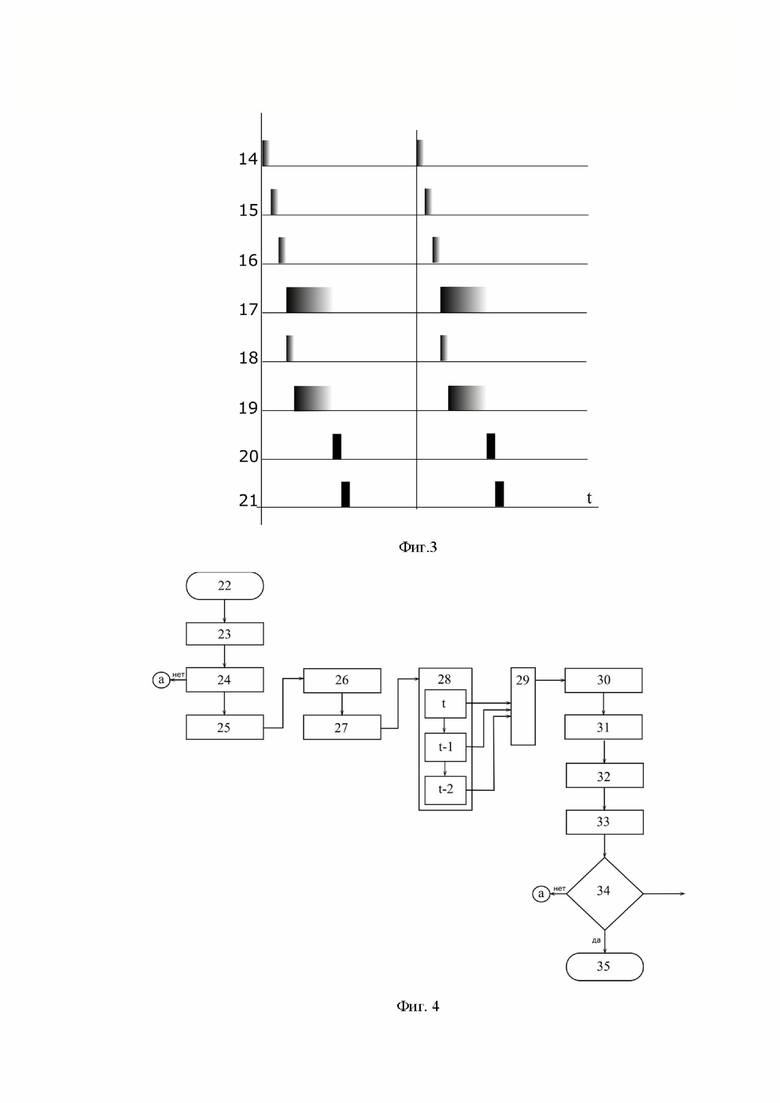
Алгоритм работы блока управления оптической системой приведен на фиг. 4, где:
- начало работы соответствует (22);
- инициализация блока управления соответствует (23);
- запуск видеокамеры слежения (8) соответствует (24);
- прием кадра с камеры слежения (8) соответствует (25);
- вычисление координат  изображения с камеры слежения (8) соответствует (26);
изображения с камеры слежения (8) соответствует (26);
- вычисление и установка корректирующего угла наклона дефлектора (5) первого контура соответствует (27);
- запись величины корректирующего сигнала для  в ячейку «t» регистра сдвига блока управления с со сдвигом всех предыдущих значений из ячейки «t» в ячейку «t-1», из ячейки «t-1» в ячейку «t-2» соответствует (28);
в ячейку «t» регистра сдвига блока управления с со сдвигом всех предыдущих значений из ячейки «t» в ячейку «t-1», из ячейки «t-1» в ячейку «t-2» соответствует (28);
- вычисление значений координат Х, У изображения на предстоящий момент времени «t+1» соответствует (29);
- вычисление и установка угла поворота дефлектора (10) второго контура соответствует (30);
- запуск видеокамеры контроля (12) соответствует (31);
- прием кадра с видеокамеры контроля (12) соответствует (32);
- передача стабилизированного изображения на внешние устройства соответствует (33);
- конец цикла соответствует (34);
- конец соответствует (35);
а - отображает выход в часть схемы и вход из другой части этой схемы, используется для обрыва линии и продолжения ее в другом месте.
Изобретение относится к области регистрации изображений и касается способа опережающей коррекции в оптической следящей системе. Принимаемое видеокамерой контура слежения изображение регистрируется равномерными кадрами, по которым рассчитываются координаты изображения на матрице видеокамеры контура слежения и запоминаются. По ним относительно координаты нуля матрицы видеокамеры слежения рассчитывается перемещение в пространстве наблюдаемого пучка и изменение углов наклона волнового фронта турбулентной атмосферы. Рассчитанный сигнал поступает на дефлектор контура слежения, который устанавливает угол поворота зеркала дефлектора и компенсирует смещение изображения на фотоприёмной матрице в последнем кадре. По координатам изображения за последние N кадров рассчитывается ожидаемое положение изображения пучка в будущем кадре, устанавливается угол наклона зеркала дефлектора коррекции так, чтобы положение изображения в будущем кадре совпадало с положением изображения на матрице видеокамеры контроля в предыдущих кадрах. Технический результат заключается в повышении качества получаемых изображений и исключении запаздывания регистрируемого изображения относительно текущего состояния атмосферы. 2 н.п. ф-лы, 4 ил.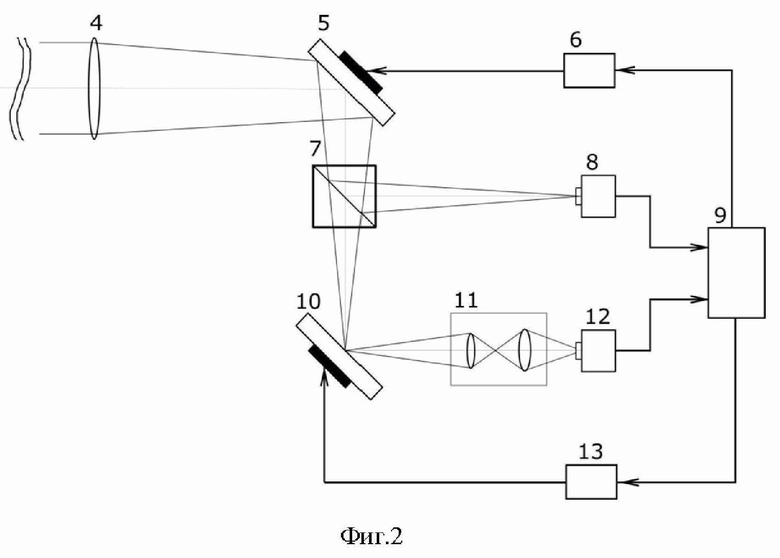
1. Способ опережающей коррекции в оптической следящей системе с контуром, содержащим объектив, видеокамеру, блок управления по координатам Х, У, дефлектор и блок управления дефлектором, отличающийся тем, что добавлен светоделительный кубик, контур с дефлектором и видеокамерой слежения, причем направление осей Х, У видеокамер и поворота зеркал обоих дефлекторов в пространстве полностью совпадают, принимаемое видеокамерой контура слежения изображение наблюдаемого объекта, прошедшее через турбулентную атмосферу, регистрируется равномерными кадрами, по которым рассчитываются координаты изображения на матрице видеокамеры контура слежения и запоминаются в регистре сдвига координат пучка блока управления системы, по ним относительно координаты нуля матрицы видеокамеры слежения рассчитывается перемещение в пространстве наблюдаемого пучка и изменение углов наклона волнового фронта турбулентной атмосферы, рассчитанный сигнал поступает на дефлектор контура слежения, который устанавливает угол поворота зеркала дефлектора и компенсирует смещение изображения на фотоприемной матрице в последнем кадре, по координатам Х, У изображения за последние N кадров, хранящимся в регистре сдвига, рассчитывается ожидаемое положение изображения пучка в будущем кадре, устанавливается угол наклона зеркала дефлектора коррекции так, чтобы положение изображения в будущем кадре совпадало с положением изображения на матрице видеокамеры контроля в предыдущих кадрах.
2. Оптическая следящая система с контуром опережающей коррекции, состоящая из входного объектива, видеокамеры слежения, дефлектора слежения, блока управления дефлектором и блока управления системой, отличается тем, что введен кубик светоделительный, который направляет изображение объекта на видеокамеру слежения, и добавлен второй контур, содержащий видеокамеру контроля, которая регистрирует изображение с опережающей коррекцией, дефлектор коррекции устраняет ошибку работы блока слежения, масштабирующие устройство, изменяет размеры пучка и блок управления дефлектором, который корректирует отклонение пучка в первом контуре.
| Способ и устройство с опережающей коррекцией в оптической системе с замкнутой обратной связью | 2021 |
|
RU2768541C1 |
| Устройство для автоматической сортировки писем или других предметов по направлениям | 1957 |
|
SU111695A1 |
| US 8731013 B2, 20.05.2014 | |||
| US 7402785 B2, 22.07.2008. | |||
