Автоматическая система служит для автоматического обнаружения очагов возгораний, расчета и определения двухмерных координат очагов возгораний на защищаемой площади.
Существующие традиционные автоматические системы обнаружения на основе точечных тепловых, дымовых или газовых пожарных извещателей не позволяют с заданной точностью и инерционностью определять местоположение очага пожара в помещениях:
- для реализации координатного обнаружения пожара внутри помещения такие системы должны строиться по адресному принципу, где разрешающая способность зависит от количества извещателей (для обеспечения высокой точности необходимо большое количество извещателей, что усложняет и удорожает систему);
- топологическая сложность масштабирования систем координатного обнаружения пожара на основе точечных извещателей.
Одним из типов извещателей, обладающих высокой эффективностью (быстродействием) обнаружения пожара на начальной фазе пламенного горения по сравнению с другими средствами обнаружения, являются извещатели пламени, работающие в инфракрасном (ИК) и/или ультрафиолетовом (УФ) оптическом спектре.
Современные традиционные извещатели пламени имеют довольно высокую чувствительность и соответственно большую дальность действия и значительную защищаемую площадь (патенты RU 2300807, RU 114547, RU 114386, RU 2296370). Однако такие извещатели не обладают возможностью идентификации местоположения и определения количества очагов пламени.
Для определения угловых координат положения очагов возгорания применяются извещатели пламени с матричной структурой чувствительного элемента. Известен извещатель пламени FlameVision «TYCO» (патенты US 6528788, US 6476859, US 6818893) с чувствительным элементом, состоящим из массива одноэлементных узконаправленных ИК датчиков (пикселей), образующих прямоугольную зону обнаружения в виде решетки 16×16 ячеек с диаграммой направленности 90° в горизонтальной плоскости и 80° - в вертикальной.
Однако точность координатного обнаружения в таких устройствах зависит от разрешения чувствительного элемента (числа пикселей на единицу площади).
Другим способом определения координат очага пожара в помещении является использование сканирующего метода, заключающегося в анализе пространства контролируемого помещения путем поэлементного просмотра и оценки интенсивности излучения очага пламени при перемещении мгновенного поля зрения (диаграммы направленности) по полю обзора извещателя.
Широко используемые для защиты объектов общественного и производственного назначения роботизированные установки пожаротушения (РУП «Страж» патент RU 63692; «ЭФЭР» патенты RU 2677622, RU 2424837; RU 191628), выполненные на базе программно управляемых пожарных стволов (оросителей), используют принцип адресного обнаружения очага пожара на основе оптических ИК (инфракрасных) датчиков пламени с узким углом обзора (от 3 до 12 град).
В таких установках сканирование защищаемой зоны (определение углового направления расположения очага относительно пожарного робота) производится за счет автоматического перемещения пожарного ствола, на котором установлен датчик пламени (при этом оптическая ось совпадает с направлением подачи огнетушащего вещества), по заданной траектории.
Такой подход требует использования дополнительных средств пожарной сигнализации, контролирующих всю защищаемую зону и выдающих сигнал «Тревога» при возникновении пожара, поскольку ИК датчик имеет узкий угол обзора и используется только для автоматического наведения пожарного ствола на очаг возгорания по заданным координатам.
Кроме того использование ИК датчика подвержено воздействию внешних источников оптических помех (например, солнечное излучение, нагретые тела) и для уменьшения числа ложных срабатываний требуется применение дополнительных каналов обнаружения (ИК, УФ (ультрафиолетового) или Видео) и более сложных алгоритмов обработки сигналов, что существенно усложняет и удорожает конструкцию.
Целью изобретения является создание автоматической системы обнаружения очагов возгорания, обладающих новыми качествами:
- новый принцип построения сканирующих извещателей пламени;
- новый алгоритм детектирования и определения координат очага возгорания в помещении;
- возможность двухмерного координатного обнаружения сразу нескольких очагов возгораний;
- возможность маскирования (блокирования) отдельных секторов зоны обнаружения для исключения ложных срабатываний от известных источников помех, не являющихся пожаром;
- возможность реализации многоспектрального принципа обнаружения (в УФ и ИК диапазонах) очага возгорания для обеспечения высокой помехозащищенности к оптическим помехам;
- наличие функции самоконтроля, при которой проверяются все внутренние электронные и оптические цепи извещателей на работоспособность и исключаются ложные срабатывания.
Технический результат должен заключаться в обеспечении высокой точности и устойчивости к оптическим помехам при двухмерном определении координат одного и более мест расположения очагов в режиме реального времени.
Поставленная цель достигается созданием автоматической системы координатного обнаружения очагов возгорания, характеризующейся тем, что состоит из, по меньшей мере, двух извещателей пламени сканирующих, установленных в разных точках защищаемого помещения с учетом углов обзора и направлений оптических осей извещателей, выполненных с возможностью каждым извещателям определять угловую координату очага возгорания и с возможностью полного обзора защищаемого помещения, при этом извещатели посредством цифрового интерфейса связаны с автоматизированным рабочим местом оператора (АРМО), оборудованным компьютером с программным обеспечением (ПО), разработанным для двухмерного координатного обнаружения очага(ов) возгорания.
Автоматическая система, согласно изобретению, имеет извещатели пламени сканирующие с функцией определения угловой координаты очага возгорания, причем каждый извещатель выполнен в виде цилиндрического корпуса с верхним прямоугольным основанием, посредством которого корпус соединен с наклонно-поворотным кронштейном, в передней части корпуса выполнен вырез, в вырезе установлено прозрачное окно в виде боковой поверхности цилиндра радиусом, равным радиусу цилиндрического корпуса, и длиной дуги, ограниченной максимальным углом обзора извещателя, внутри корпуса вблизи его центральной части установлен фотоприемник излучения, за прозрачным окном установлено поворотное устройство сканирования, представляющее собой вращающийся цилиндрический щелевой обтюратор с возможностью формирования засветки чувствительного элемента фотоприемника сектором с углом раскрытия в горизонтальной плоскости значительно меньшим, чем максимальный угол обзора чувствительного элемента фотоприемника извещателя, в обтюраторе с противоположной стороны от щелевого зазора выполнен широкий секторный вырез, выполненный по форме окна, угол раскрытия секторного выреза выбран равным максимальному углу обзора чувствительного элемента фотоприемника и соответствует наиболее полному освещению фотоприемника, внутри корпуса в поперечном сечении за фотоприемником установлена печатная плата микропроцессорного блока с электронными элементами и с установленным соосно центральной оси корпуса электрическим приводом обтюратора.
Прозрачное окно может быть выполнено из кварцевого стекла или лейкосапфира с возможностью прохождения ультрафиолетового (УФ) и инфракрасного (ИК) излучения.
На передней части корпуса извещателя может быть выполнено дополнительное окно для индикаторного светодиода.
Корпус извещателя может иметь встроенный звуковой оповещатель.
Фотоприемник может быть выполнен в виде одного или более оптических датчиков, регистрирующих электромагнитное излучение пламени в УФ и/или ИК спектральных поддиапазонах, характерных полосам излучения различных горючих веществ и материалов.
Область максимальной спектральной чувствительности элементов фотоприемника выполнена: для ИК поддиапазонов: 1,4…1,5 мкм, 4,3…4,5 мкм; для УФ поддиапазона: 0,18…0,26 мкм.
Автоматическая система координатного обнаружения очагов возгораний функционально представляет собой, по меньшей мере, две функциональные подсистемы, содержащие по извещателю пламени сканирующему с функцией определения каждым извещателем угловой координаты очага пожара, соединенных посредством своих цифровых интерфейсов с автоматизированным рабочим местом оператора (АРМО) пожарной сигнализации, выполненным в виде компьютера с установленным программным обеспечением (ПО).
Атоматическая система координатного обнаружения очагов возгораний функционально состоит из, по меньшей мере, двух функциональных подсистем, связанных с автоматизированным рабочим местом оператора, причем каждая функциональная подсистема содержит плату с микропроцессорным блоком, который через свои входы связан с блоком контроля положения обтюратора и через усилитель-формирователь импульсов с чувствительным элементом фотоприемника, при этом через свои выходы связан с формирователем напряжения высокого уровня, электроприводом обтюратора, блоком звуковой и световой сигнализации, коммутационным блоком, цифровым инрефейсом, выполненными в каждом извещателе пламени сканирующем.
Более подробно изобретение поясняется при помощи иллюстраций на фиг. 1 - фиг. 5.
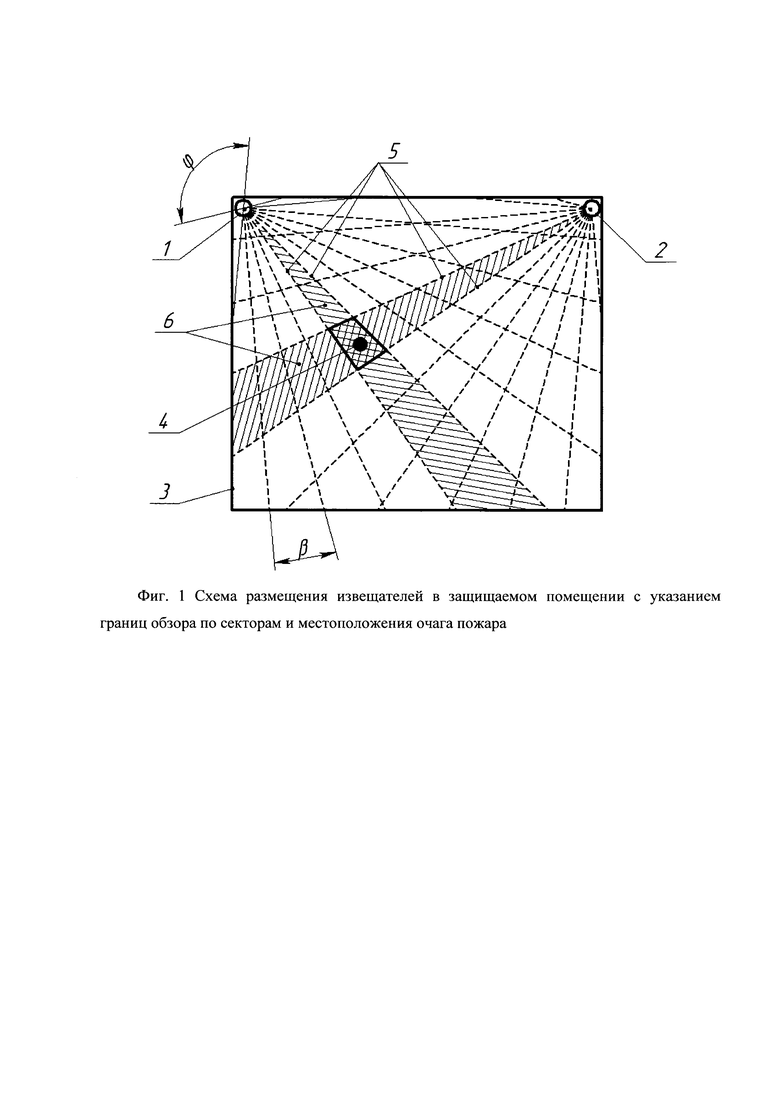
Фиг. 1 Схема размещения извещателей в защищаемом помещении с указанием границ обзора по секторам и местоположения очага пожара;
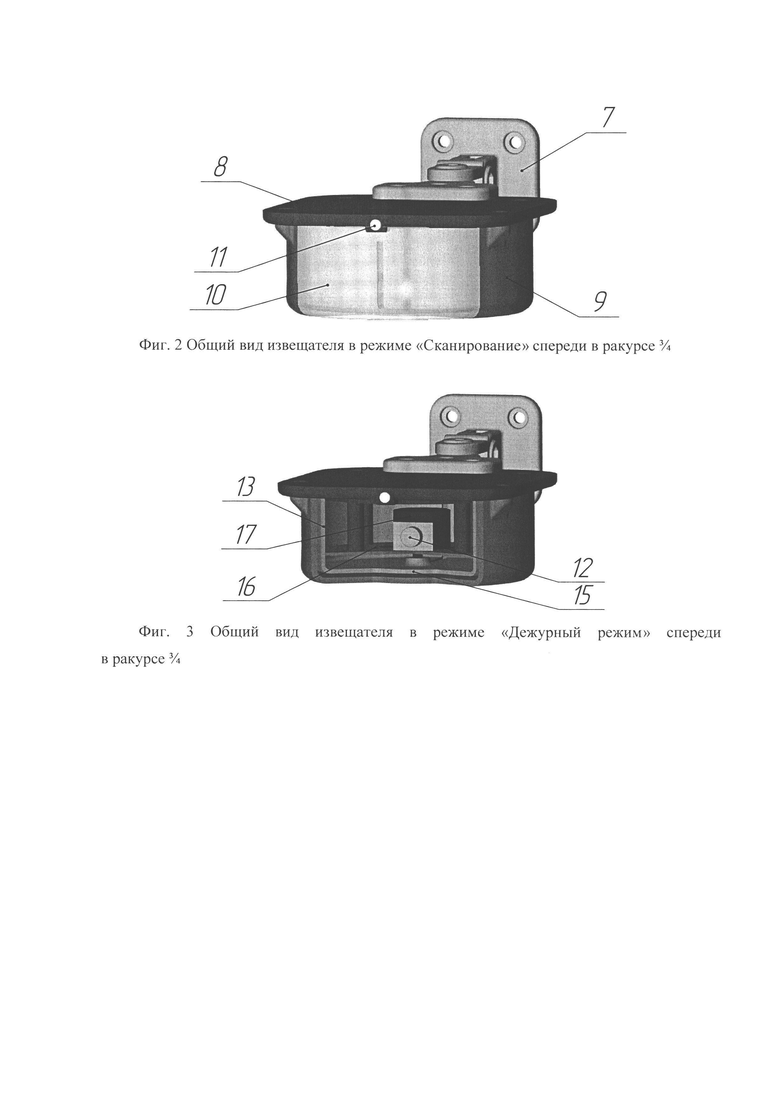
Фиг. 2 Общий вид извещателя в режиме «Сканирование» спереди в ракурсе  ;
;
Фиг. 3 Общий вид извещателя в режиме «Дежурный режим» спереди в ракурсе  ;
;
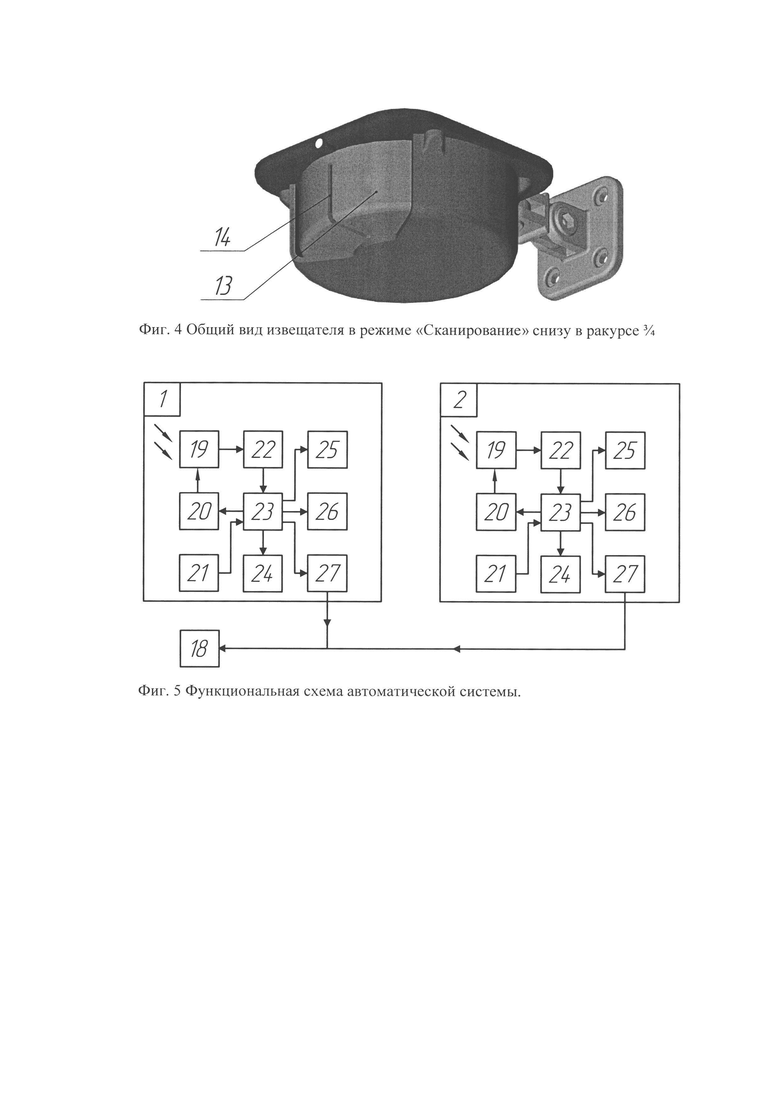
Фиг. 4 Общий вид извещателя в режиме «Сканирование» снизу в ракурсе  ;
;
Фиг. 5 Функциональная схема автоматической системы.
На фиг. 1 показано схематично расположение извещателей 1, 2 в границах защищаемого помещения 3 с условным изображениям очага возгорания 4, с изображением границ углов обзора 5 по N секторам каждого извещателя, с изображением заштрихованных границ секторов 6, в которых обнаружен очаг пожара.
Каждый извещатель пламени сканирующий (фиг. 2 - фиг. 4) содержит установленное на наклонно-поворотном кронштейне 7 с возможностью ориентации в любом требуемом направлении прямоугольное основание 8 и закрепленный на нем цилиндрический корпус 9. На лицевой части корпуса установлено оптически прозрачное окно 10 в виде боковой поверхности цилиндра радиусом, равным радиусу цилиндрического корпуса, и длиной дуги, ограниченной максимальным углом обзора извещателя в горизонтальной плоскости. Окно 10 изготовлено из кварцевого стекла или лейкосапфира и обеспечивает возможность прохождения УФ и ИК излучений к чувствительному элементу извещателя. Корпус дополнительно снабжен окном для индикаторного светодиода 11, расположенным на лицевой части извещателя. Внутри корпуса вблизи его центральной оси установлен приемник излучения (фотоприемник) 12.
В корпусе за прозрачным окном установлено поворотное устройство сканирования, представляющее собой вращающийся цилиндрический щелевой обтюратор 13 для перекрывания потока излучения, падающего на приемник излучения. В боковой поверхности и нижнем основании обтюратора выполнен щелевой зазор 14, обеспечивающий формирование засветки чувствительного элемента приемника излучения сектором с углом раскрытия в горизонтальной плоскости значительно меньшим, чем максимальный угол обзора чувствительного элемента приемника излучения извещателя. При этом в обтюраторе с противоположной стороны от щелевого зазора имеется секторный вырез 15, выполненный по форме окна. Угол раскрытия секторного выреза выбирается равным максимальному углу обзора чувствительного элемента приемника излучения извещателя и соответствует открытому состоянию извещателя, при котором излучение пламени беспрепятственно попадает на приемник излучения. Внутри корпуса в поперечном сечении установлена печатная плата 16 с электронными элементами микропроцессорного блока. Обтюратор крепится на оси и приводится в движение с помощью электрического привода 17, установленного на печатной плате соосно центральной оси корпуса.
Функционально автоматическая система (фиг. 5) состоит из двух одинаковых подсистем извещателей 1 и 2, соединенных посредством цифрового интерфейса с АРМО 18 пожарной сигнализации.
Функционально каждая подсистема состоит из: чувствительного элемента 19 (УФ, ИК сенсора), формирователя напряжения высокого уровня 20, блока контроля положения обтюратора 21, усилителя-формирователя импульсов 22, микропроцессорного блока 23, электропривода обтюратора 24, блока визуальной и звуковой индикации 25, коммутационного блока для активации подключаемых внешних устройств 26, цифрового интерфейса 27 для обмена данными с АРМО 18.
Принцип работы извещателя сканирующего с функцией определения угловой координаты очага пожара пояснен планом, на котором показаны: места установки извещателей 1 и 2, границы защищаемого помещения 3, местоположение очага пожара 4, границы 5 секторов 6, в которых расположен очаг возгорания.
При включении микропроцессорный блок 23 инициирует переход извещателя в «Дежурный» режим путем воздействия на электропривод обтюратора 24 и контроля достижения исходного положения, соответствующего «Дежурному» режиму, с помощью блока контроля положения обтюратора 21. Микропроцессорный блок по средствам управления формирователем напряжения высокого уровня 20 осуществляет подачу электрического питания на оптический сенсор 19 с требуемым напряжением.
При наличии в поле зрения сенсора источника открытого пламени, импульсы с частотой, коррелирующей с интенсивностью падающего на сенсор излучения, поступают на усилитель-формирователь импульсов 22, где преобразуются и поступают на вход микропроцессорного блока.
Микропроцессорный блок осуществляет обработку поступившего сигнала по заданному алгоритму. Если условия, заложенные в алгоритме, по надежному обнаружению очага пламени выполнены, микропроцессорный блок активирует режим «Сканирование», подавая сигнал на электропривод обтюратора и коммутационный блок 26, сигнализирующий о наличии очага пожара, и анализируя полезный сигнал с оптического сенсора.
В алгоритме работы извещателя вся область обзора оптического сенсора делится на некоторое фиксированное количество равных радиальных секторов, при этом импульсы, формирующиеся сенсором и соответствующие наличию очага пламени в зоне обнаружения, фиксируются для каждого сектора отдельно.
Обработка полученной информации об интенсивности излучения пламени по каждому сектору обнаружения в микропроцессорном блоке позволяет выделить одну или несколько областей в угловом представлении относительно оптической оси извещателя, в которых находится вероятный очаг возгорания.
Эти данные, как и информация о текущем режиме, сохраняются во внутренней памяти извещателя (микропроцессорном блоке) и считываются ПО компьютера с помощью цифрового интерфейса 27. Информация о режимах работы извещателя выдается однозначным образом с помощью блока световой и звуковой индикации 23.
Алгоритм работы извещателя заключается в определении углового направления положения очага пламени в горизонтальной плоскости помещения методом разбиения всей контролируемой зоны обнаружения с максимальным углом обзора ϕ на N равных независимых секторов с меньшим углом обзора β (фиг. 1) так, что ϕ=β⋅N.
Количество секторов N выбирается с учетом требуемой точности координации (зонной селективности обнаружения).
В «Дежурном режиме» при отсутствии очага пламени извещатель находится в открытом состоянии и непрерывно контролирует зону обнаружения с максимальным углом обзора ϕ в горизонтальной и вертикальной плоскостях.
При возникновении очага пламени в зоне обнаружения извещателя формируется сигнал «Пожар», после чего извещатель переходит в режим «Сканирование» защищаемой зоны для поиска углового направления положения очага возгорания.
В режиме «Сканирование» извещатель последовательно осуществляет оценку интенсивности излучения от очага пламени для каждого из N секторов обнаружения и определяет сектор с величиной интенсивности поступающего излучения, превышающей фиксированное пороговое значение.
Информация о наличии возгорания и радиальном направлении обнаруженного сектора, в котором находится очаг пламени, сохраняется в памяти каждого извещателя и считывается по цифровому интерфейсу ПО компьютера.
Такой подход к построению извещателя на основе секторальной селективности позволяет обнаруживать и определять угловые координаты сразу нескольких очагов пожара, находящихся в различных секторах. Кроме того, имеется возможность программного маскирования (блокирования) одного или нескольких секторов обнаружения для исключения ложных срабатываний от постоянного или вероятного присутствия естественных источников открытого пламени, не являющихся пожаром.
Также извещатель имеет дополнительную функцию самоконтроля работоспособного состояния, при которой проверяются все внутренние электронные и оптические цепи извещателя. Принцип самотестирования заключается в том, что в момент срабатывания извещателя и выдачи сигнала «Пожар» (до начала процесса сканирования) происходит кратковременное полное перекрывание всей области обзора извещателя и проверяется отсутствие сигнала с чувствительного элемента с целью исключения ложноположительных срабатываний извещателя из-за выхода из строя чувствительного элемента.
Алгоритм работы автоматической системы координатного обнаружения очага возгорания построен по принципу последовательного считывания с каждого извещателя 1, 2 состояния работы, определения условного порядкового номера сектора обзора, в котором обнаружен очаг 4, и принятия решения на основе области пересечения секторов 6 посредством программы (на АРМО 18 автоматически вычисляют двухмерные коодинаты месторасположения очага возгорания 4).
Сбор данных с каждого извещателя, обработка информации о пожаре (динамично развивающемся процессе) происходят в режиме реального времени, автоматически посредством ПО компьютера, что позволяет обеспечивать высокую точность определения местоположения очага, причем за счет реализации многоспектрального принципа обнаружения в УФ и ИК диапазонах обеспечивается высокая помехозащищенность по отношению к оптическим помехам.
ПО системы позволяет посредством компьютера визуализировать положение очага возгорания и динамику развития пожара, что дает дополнительную возможность объективно и точно оценивать пожарную опасность, оперативно принимать меры по устранению опасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗВЕЩАТЕЛЬ ПЛАМЕНИ СКАНИРУЮЩИЙ С ФУНКЦИЕЙ ОПРЕДЕЛЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОЧАГА ПОЖАРА | 2020 |
|
RU2756593C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КООРДИНАТНОГО ОБНАРУЖЕНИЯ ОЧАГОВ ВОЗГОРАНИЙ | 2021 |
|
RU2768570C1 |
| Пожарный извещатель для наведения пожарного робота | 2016 |
|
RU2625715C1 |
| УСТРОЙСТВО КРУГЛОСУТОЧНОГО ОБНАРУЖЕНИЯ И МОНИТОРИНГА РАЗВИТИЯ ОЧАГОВ ПОЖАРОВ В РЕГИОНЕ | 2004 |
|
RU2276808C2 |
| ПИРОМЕТРИЧЕСКИЙ ДАТЧИК КООРДИНАТ ОЧАГА ВОЗГОРАНИЯ | 2006 |
|
RU2318242C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2009 |
|
RU2407568C2 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| ПИРОМЕТРИЧЕСКИЙ ДАТЧИК ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 1995 |
|
RU2109345C1 |
| ПОЖАРНЫЙ ИЗВЕЩАТЕЛЬ | 2010 |
|
RU2538940C2 |
Автоматическая система служит для координатного обнаружения очагов возгорания, расчета и определения двухмерных координат очагов возгораний на защищаемой площади. Для осуществления системы используются, по меньшей мере, установленные в разных местах два извещателя пламени сканирующие, с возможностью каждым извещателем определять угловую координату очага возгорания; извещатели посредством интерфейса связаны с автоматизированным рабочем местом оператора, оборудованным компьютером с установленным программным обеспечением. Функционально система состоит из, по меньшей мере, двух подсистем извещателей пламени сканирующих, каждая из которых содержит плату с микропроцессорным блоком, который через свои входы связан с блоком контроля положения обтюратора и через усилитель-формирователь импульсов с чувствительным элементом фотоприемника, при этом через свои входы связан с формирователем напряжения высокого уровня, электроприводом обтюратора, блоком сигнализации, коммутационным блоком, цифровым интерфейсом. 2 н. и 7 з.п. ф-лы, 5 ил.
1. Автоматическая система координатного обнаружения очагов возгораний, характеризующаяся тем, что состоит из, по меньшей мере, двух извещателей пламени сканирующих с функцией определения угловой координаты очага возгорания, выполненные каждый в виде цилиндрического корпуса с верхним прямоугольным основанием, посредством которого корпус соединен с наклонно-поворотным кронштейном, в передней части корпуса выполнен вырез, в вырезе установлено прозрачное окно в виде боковой поверхности цилиндра радиусом, равным радиусу цилиндрического корпуса, и длиной дуги, ограниченной максимальным углом обзора извещателя, внутри корпуса вблизи его центральной части установлен фотоприемник излучения, за прозрачным окном установлено поворотное устройство сканирования, представляющее собой вращающийся цилиндрический щелевой обтюратор с возможностью формирования засветки чувствительного элемента фотоприемника с сектором с углом раскрытия в горизонтальной плоскости, меньшим, чем максимальный угол обзора чувствительного элемента фотоприемника извещателя, в обтюраторе с противоположной стороны от щелевого зазора выполнен секторный вырез, выполненный по форме окна, угол раскрытия секторного выреза выбран равным максимальному углу обзора чувствительного элемента фотоприемника и соответствует полному освещению фотоприемника, внутри корпуса в поперечном сечении за фотоприемником установлена печатная плата микропроцессорного блока с электронными элементами и с установленным соосно центральной оси корпуса электрическим приводом обтюратора, установленных в разных точках защищаемого помещения с учетом углов обзора, направлений оптических осей извещателей с возможностью каждым извещателям определять угловую координату очага возгорания, выполненных с возможностью полного обзора защищаемого помещения, извещатели посредством цифрового интерфейса связаны с автоматизированным рабочим местом оператора, оборудованным компьютером с программным обеспечением, разработанного для двухмерного координатного обнаружения очага возгорания.
2. Автоматическая система по п. 1, отличающаяся тем, что прозрачное окно выполнено из кварцевого стекла с возможностью прохождения ультрафиолетового и инфракрасного излучения.
3. Автоматическая система по п. 1, отличающаяся тем, что прозрачное окно выполнено из лейкосапфира с возможностью прохождения ультрафиолетового и инфракрасного излучения.
4. Автоматическая система по п. 1, отличающаяся тем, что передняя часть корпуса извещателя имеет дополнительное окно для индикаторного светодиода, расположенного на передней части.
5. Автоматическая система по п. 1, отличающаяся тем, что корпус извещателя имеет встроенный звуковой оповещатель.
6. Автоматическая система по п. 1, отличающаяся тем, что фотоприемник может быть выполнен в виде одного или более оптических датчиков, регистрирующих электромагнитное излучение пламени в ультрафиолетовом и/или инфракрасном спектральных поддиапазонах, характерных полосам излучения различных горючих веществ и материалов.
7. Автоматическая система координатного обнаружения очагов возгорания, отличающаяся тем, что функционально состоит из, по меньшей мере, двух одинаковых функциональных подсистем, содержащих по извещателю пламени сканирующему с функцией определения каждым извещателем угловой координаты очага пожара, соединенных посредством своих цифровых интерфейсов с автоматизированным рабочим местом оператора пожарной сигнализации, выполненным в виде компьютера с программным обеспечением.
8. Автоматическая система по п. 7, отличающаяся тем, что функционально состоит из, по меньшей мере, двух функциональных подсистем, связанных с автоматизированным рабочим местом оператора, причем каждая функциональная подсистема содержит плату с микропроцессорным блоком, который через свои входы связан с блоком контроля положения обтюратора и через усилитель-формирователь импульсов с чувствительным элементом фотоприемника, при этом через свои выходы связан с формирователем напряжения высокого уровня, электроприводом обтюратора, блоком звуковой и световой сигнализации, коммутационным блоком, цифровым интерфейсом, выполненными в каждом извещателе пламени сканирующем.
9. Автоматическая система по п. 7, отличающаяся тем, что область максимальной спектральной чувствительности элементов фотоприемника выполнена: для инфракрасных поддиапазонов: 1,4…1,5 мкм, 4,3…4,5 мкм; для ультрафиолетового поддиапазона: 0,18…0,26 мкм.
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2411974C1 |
| Способ улучшения рабочих характеристик гистерезисного двигателя | 1958 |
|
SU119918A1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| US 6064064 A1, 16.05.2000 | |||
| Способ получения гидратронового спирта | 1959 |
|
SU129651A1 |
| МОДУЛЯЦИОННЫЙ ДАТЧИК ПЛАМЕНИ | 2001 |
|
RU2179743C1 |

