Область техники
Изобретение относится к системе управления потоком для заполнения мешков гранулированным продуктом, содержащей ускорительный трубопровод с частью для дозирования, рядом с указанной частью для дозирования предусмотрено дозирующее устройство, содержащее хранилище дозированного количества, перемещаемого между положением удержания для удержания количества дозированного продукта и положением выгрузки для выгрузки указанного количества дозированного продукта, и устройство для наполнения, содержащее приемное средство для приема заполняемого мешка.
Изобретение также относится к машине, содержащей систему управления потоком в соответствии с изобретением.
Наконец, изобретение относится к способу управления потоком для заполнения мешка гранулированным продуктом через ускорительный трубопровод, указанный ускорительный трубопровод имеет часть для дозирования и устройство для наполнения для заполнения указанного мешка в месте расположения пустого мешка.
Уровень техники
Существует несколько отраслей промышленности, в которых их гранулированные продукты (пластиковые гранулы, удобрения, сахар и т.д.) упаковываются в пластиковые пакеты или мешки, пакеты из рафии или контейнеры, имеющие аналогичные характеристики, дозированное количество продукта, выполненные вместимостью около 25 кг. В изобретении под гранулированным продуктом понимается продукт, размер зерна которого превышает 50 микрон.
Автоматические высокопроизводительные машины используются для заполнения контейнеров этого типа. В изобретении под машиной с высокой производительностью понимается почасовая производительность более 1800 мешков в час.
Кроме того, мешки с боковыми складками используются во многих отраслях промышленности для улучшения товарного вида контейнеров и уравновешенности поддонов с наполненными мешками.
Еще одной развивающейся тенденцией является использование машин, обычно известных как FFS (Машины для формования, заполнения и укупоривания), которые изготавливают пакет в самой машине из рулона или бобины пластикового рукава с должным образом сформованными боковыми складками. Указанные машины изготавливают мешки, заполняют их соответствующим продуктом и запечатывают их с помощью сварки в самой машине. Тем не менее, следует отметить, что мешки такого типа не используются исключительно в этих машинах. В контексте изобретения система не ограничивается применением в машинах FFS.
Кроме того, в случае мешков этого типа боковые складки или гофры всегда должны оставаться надежно закрепленными в области отверстия для заполнения во время процесса наполнения и запечатывания мешков. Это делается для предотвращения деформации мешка, которая помешала бы правильному укупориванию и финишной обработке. Поскольку складки должны быть надежно закреплены, требуемой отверстие для заполнения мешка значительно уменьшается. Из-за уменьшения доступного проходного сечения может произойти медленное заполнение.
В существующем уровне техники для решения этой проблемы используется решение, состоящее в ускорении продукта по мере его перемещения между дозирующим устройством и отверстием для упаковки в мешки машины. С этой целью, как правило, используется ускорительный трубопровод, принцип функционирования которого основан на силе тяжести, он имеет подходящую длину и коническую форму. Этот ускорительный трубопровод соединяет воронку, собирающую продукт, выгружаемый из дозирующего устройства (большее сечение трубопровода), и приводит его в движение по мере увеличения скорости к отверстию для упаковки в мешки (меньшее сечение).
Если начальная часть ускорительного трубопровода откроется слишком широко, произойдет закупорка, и продукт потеряет скорость при прохождении через него. Это увеличивает время в пути и приводит к производственным потерям. С другой стороны, недостаточное проходное отверстие на части для дозирования ускорительного трубопровода также приведет к снижению производительности упаковочной станции.
ЕР 0842087 А1 раскрывает способ и устройство для подачи по существу сыпучих твердых загружаемых продуктов в вертикальную дозировочно-упаковочную машину непрерывного действия.
US 2018/141890 А1 раскрывает устройство управления выгрузкой продукта для дозировочно-упаковочной машины для надежного и более быстрого заполнения мешков.
US 2010/219002 А1 раскрывает измерительное устройство, содержащее измерительную часть, сконфигурированную и расположенную для выгрузки группы объектов, измеренных по заранее определенному весу в заданный интервал времени, и бункер, расположенный под измерительной частью.
US 5168906 А раскрывает устройство для заполнения частично открытых мешков или мешков с клапанами дозированными количествами сыпучих материалов, имеющее трубопровод для подачи самотеком, верхний конец которого принимает дозированные количества сыпучих материалов, нижний конец которого выгружает последовательно дозированные количества в отдельные мешки.
Наконец, US 5443102 А раскрывает способ заполнения мешка, в результате которого сыпучий материал поступает из контейнера под действием силы тяжести через заполняющий трубопровод во вкладыш мешка.
Раскрытие сущности изобретения
Изобретение решает задачу создания системы управления потоком для заполнения мешка гранулированным продуктом, которая позволяет увеличить скорость наполнения мешка, снизить вероятность закупоривания ускорительного трубопровода и нежелательных простое машины.
Это достигается посредством системы управления потоком указанного выше типа, характеризующаяся тем, что она дополнительно содержит устройство управления потоком, указанное устройство управления предусмотрено между указанной частью для дозирования и указанной частью для наполнения и содержит, по меньшей мере, одну регулирующую лопасть, указанная, по меньшей мере, одна регулирующая лопасть перемещается между множеством положений управления, расположенных между максимальным положением открытия указанного трубопровода, в котором максимальный поток указанного гранулированного продукта может проходить через указанное устройство управления, и закрытое положение указанного трубопровода, в котором поток указанного гранулированного продукта через указанное устройство управления прерывается, первый датчик прохождения гранулированного продукта, предусмотренный в промежуточной точке, расположенной между указанными частями для дозирования и наполнения, выше по потоку указанной, по меньшей мере, одной управляющей лопастью, и функционально связанный с указанным устройством управления, второй датчик прохождения гранулированного продукта, предусмотренный на указанной части для наполнения, и указанное дозирующее устройство, указанное устройство управления, и упомянутые первый и второй датчики функционально связаны друг с другом таким образом, что указанное хранилище дозированного количества указанного дозирующего устройства перемещается между указанными положениями удержания и выгрузки, и указанная, по меньшей мере, одна лопасть указанного устройства управления перемещается между одним положением указанного множества положений в зависимости от того, обнаруживают ли упомянутые первый и второй датчики скопление гранулированного продукта на указанной части для наполнения, которое может задержать заполнение указанного мешка.
Система, согласно изобретению, позволяет компенсировать небольшие или большие отклонения, которые могут возникать из-за плотности, текучести или других факторов. Эти отклонения могут даже возникать в одной и той же производственной партии и могут повлиять на ускорение упаковки продукта при его падении в нее. Как уже объяснялось, это может резко снизить производительность упаковочной машины. Таким образом, наличие первого и второго датчиков можно прогнозировать ситуации, происходящие в области расположения мешка, и ситуации, которые произойдут в следующие моменты времени, что позволяет согласовывать перемещение двух дозированных количеств без риска попадания обоих дозированных количеств в один и тот же мешок несмотря на то, что они измеряются очень близко друг к другу по времени. Другими словами, в результате функционирования устройства управления последующее дозированное количество может быть выгружено, когда мешок из предыдущей партии все еще расположен на средстве для наполнения. Соответственно это позволяет значительно увеличить скорость наполнения мешка.
Изобретение дополнительно включает в себя ряд желательных признаков, которые характеризуют частные случаи выполнения изобретения и которые будут описаны ниже в вариантах осуществления изобретения.
В предпочтительном варианте осуществления, имеющем целью оптимизировать скорость реагирования устройства управления, упомянутая, по меньшей мере, одна управляющая лопасть представляет собой две пластины, которые симметричны относительно продольной оси упомянутого трубопровода, и в упомянутом закрытом положении указанные две пластины образуют относительно друг друга угол менее 180°, вершина которого указывает в сторону упомянутой частью для наполнения. Такой угол в сочетании с плоскими пластинами обеспечивает немедленное реагирование, особенно в случае открытия пластин. В предпочтительном варианте осуществления угол между обеими пластинами составляет от 75 до 150°.
Согласно предпочтительному варианту осуществления изобретения, упомянутая, по меньшей мере, одна управляющая лопасть установлена с возможностью поворота вокруг поворотного вала.
В другом варианте осуществления поперечное сечение указанного трубопровода сужается от части для дозирования до части для наполнения.
Кроме того, приемные средства содержат откачивающие средства, обеспечивающие отсасывание для части для наполнения указанного трубопровода. В случае, если происходит застревание дозированного количества продукта, в этой области может быть выполнено мягкое всасывание. Это встряхивает застрявшее дозированное количество и может привести к тому, что оно упадет в мешок.
В другом варианте осуществления первый датчик прохождения гранулированного продукта установлен в устройстве управления. Это облегчает сборку датчика и управление устройством управления.
Предпочтительно, указанный второй датчик прохождения гранулированного продукта установлен в указанном приемном средстве, что также облегчает сборку.
Изобретение также относится к упаковочной машине, содержащей систему управления потоком в соответствии с изобретением для заполнения мешка гранулированным продуктом. Особенно предпочтительно, чтобы машина являлась машиной FFS.
Кроме того, изобретение относится к способу управления потоком для заполнения мешка гранулированным продуктом, который включает в себя следующие этапы:
[a] выгрузка дозированного количества гранулированного материала через указанную часть для дозирования из точки дозирования,
[b] измерение прохождения дозированного количества, которое ранее было выгружено через указанную часть для дозирования из указанной точки дозирования, через промежуточную точку, расположенную между указанными частями для дозирования и наполнения и имеющую проходное сечение, которое может быть изменено,
[c] определение первого времени поступления (ta1) и первого времени прохождения (tp1) указанного дозированного количества, прохождение которого было измерено на этапе [Ь], указанное первое время поступления (ta1) представляет собой время, прошедшее между моментом выгрузки указанного дозированного количества с указанной измерительной частью и моментом обнаружения начальной части указанного дозированного количества в указанной промежуточной точке, и указанное первое время прохождения (tp1) представляет собой время, прошедшее между моментом обнаружения указанной начальной части и моментом обнаружения конечной части указанного дозированного количества в указанной промежуточной точке,
[d] измерение прохождения дозированного количества, которое ранее было выгружено через указанную часть для дозирования из указанной точки дозирования, через точку наполнения, расположенную на указанной части для наполнения,
[е] измерение второго времени поступления (ta2) и второго времени прохождения (tp2) указанного дозированного количества, прохождение которого было обнаружено на этапе [d], указанное второе время поступления (ta2) представляет собой время, прошедшее между моментом выгрузки указанного дозированного количества с указанной части для дозирования и моментом обнаружения начальной части указанного дозированного количества в указанной точке заполнения, а указанное второе время прохождения (tp2) представляет собой время, прошедшее между моментом обнаружения указанной начальной части и моментом обнаружения конечной части указанного дозированного количества в указанной точке заполнения, таким образом, выполняется следующий альтернативный этап:
[i] если tc+tp2<tu2, выгружается последующее дозированное количество (D2) гранулированного продукта, при этом tc представляет собой заданное время размещения мешка, в то время как
[ii] если tp1<tp2, указанное проходное сечение указанной промежуточной точки (22) уменьшается, по крайней мере, до тех пор, пока не будет выполнено условие tp1≥tp2.
В контексте настоящего изобретения уменьшение проходного сечения промежуточной точки относится к конструктивным особенностям проходного сечения таким образом, чтобы оно становилось уже или до тех пор, пока проходное сечение для гранулированного материала полностью не закроется для удержания дозированного количества.
Контроль времени поступления и прохождения фактически позволяет очень точно контролировать положение дозированного количества, когда оно проходит через ускорительный трубопровод. Соответственно, в результате управления датчиком в зоне наполнения и в промежуточной точке может быть выгружено второе дозированное количество, когда первое дозированное количество все еще не закончило попадать в заполняемый мешок. Это позволяет очень значительно увеличить скорость наполнения, не вызывая соединение следующих друг за другом дозированных количеств.
Предпочтительно, этапы [ei] и [eii] выполняются от первого времени прохождения (tp1), второго времени прохождения (tp2) и второго времени поступления (ta2) одного и того же первого отмеренного количества.
В другом альтернативном варианте осуществления указанные этапы [ei] и [eii] выполняются от второго времени прохождения (tp2) первого измеренного количества и первого времени прохождения (tp1+1) и второго времени поступления (ta2+1) второго измеренного количества, следующего за указанным первым измеренным количеством.
В другом предпочтительном варианте осуществления, имеющем целью снижение уязвимости к непостоянному поведению гранулированного материала, указанное первое и второе время прохождения (tp1, tp2) и указанное первое и второе время поступления (ta1, ta2) рассчитываются как среднее арифметическое времени прохождения и поступления множества времен ранее отмеренных количеств.
В другом варианте осуществления, имеющем целью осуществления способа наполнения, который приспособлен к кратковременному последовательному наполнению мешка, время размещения мешка (tc) определяется экспериментально пока указанное второе дозированное количество проходит через указанный ускорительный трубопровод.
В другом варианте осуществления изобретения, имеющем целью снижение влияния ошибок при размещении мешка, указанное время размещения tc определяется как среднее арифметическое времени размещения tc посредством множества предыдущих времен размещения мешков.
Аналогичным образом, изобретение также включает в себя другие частные случаи выполнения, охарактеризованные в вариантах осуществления изобретения и на прилагаемых рисунках.
Краткое описание чертежей
Дальнейшие преимущества и особенности изобретения станут очевидными из приведенных далее сведений, которые без какого-либо ограничения раскрывают предпочтительные варианты осуществления изобретения со ссылкой на прилагаемые следующие чертежи:
Фиг. 1 - система управления потоком для наполнения мешков гранулированным продуктом в схематическом виде в соответствии с настоящим изобретением;
Фиг. 2-7 схематический вид этапов способа управления с помощью системы управления во время оптимальной операции наполнения мешка;
Фиг. 8-10 - схематический вид этапов способа, когда возникает нежелательное закупоривание ускорительного трубопровода.
Осуществление изобретения
На фиг. 1 схематично показан вариант выполнения системы 1 управления потоком для заполнения мешка 100 гранулированным продуктом согласно изобретению.
Система имеет транзитный ускорительный трубопровод 2, расположенный, по существу, в вертикальном направлении. Трубопровод 2 имеет часть для дозирования 4 в верхней части иллюстрации и часть для наполнения 10 в нижней части. Трубопровод 2 имеет поперечное сечение, сужающееся в направлении падения гранулированного продукта. Кроме того, трубопровод 2 предпочтительно имеет форму конуса в направлении от части для дозирования 4 к части для наполнения 10. Предпочтительно трубопровод 2 является жестким и изготовлен из листового металлического материала, пластика или подобного материала. В качестве альтернативы части трубопровода могут быть гибкими.
Рядом с частью для дозирования 4 трубопровода 2 предусмотрено дозирующее устройство 6, состоящее из устройства взвешивания, в котором дозированное количество гранулированного продукта подготавливается для заполнения мешка 100 для каждого цикла наполнения. Общее дозированное количество в системах этого типа составляет около 25 кг. С этой целью предусмотрена система быстрого взвешивания, в которой весовой ковш 38 заполняется с помощью сервомотора M1, который приводит в действие чашу 40, с первой выгрузкой массы гранулированного продукта, близкой к требуемой массе, в устройство взвешивания осуществляют загрузку до тех пор, пока не будет выполнена точная регулировка требуемой массы путем добавления конечных граммов, необходимых для регулировки дозированного количества. Поэтому эта масса удерживается в дозирующем устройстве 6 для подготовки к выгрузке.
Дозирующее устройство 6 содержит дозирующий хранилище 8, имеющее две лопасти в виде плоских пластин. Эти две плоские пластины шарнирно перемещаются вокруг вала 26 между положением удержания для удержания дозированного количества продукта и положением выгрузки для выгрузки дозированного количества продукта. Перемещение осуществляется с помощью пневматических цилиндров, не показанных на фиг. 1. Кроме того, для облегчения понимания сущности изобретения на фиг. 1 левая лопасть находится в положении удержания для удержания дозированного количества обозначена позицией 8а, тогда как позицией 8b показано положение выгрузки для выгрузки дозированного количества.
Трубопровод 2 имеет на противоположном конце часть для наполнения 10. С этого конца предусмотрены приемные средства 12 для приема мешка 100. Эти приемные средства 12 представляют собой, например, входное отверстие, приспособленное к поперечному сечению отверстия мешка 100. Для обеспечения надлежащего заполнения мешка 100 без просыпей, мешок 100 предназначен для установки на эти приемные средства 12. Приемные средства 12 имеют откачивающие средства. Они позволяют отсасывать для части для наполнения 10 трубопровода 2, чтобы максимально предотвратить образование закупорки трубопровода гранулированным продуктом. Всасывание для устранения более значительных закупориваний трубопровода может быть осуществлено непрерывным всасыванием или только дискретным всасыванием. Откачивающим средством может быть обычный центробежный насос, не показанный на иллюстрациях, подключенный к выходным отверстиям 30. В качестве альтернативы откачивающее средство может также впрыскивать газ.
Устройство (14) управления потоком, имеющее две управляющие лопасти 16, предусмотрено между частью для дозирования 4 и частью для наполнения 10. Как изображено на фиг. 1, эти управляющие лопасти 16 перемещаются между множеством управляющих положений. Для обеспечения возможности осуществления точного управления перемещение управляющих лопастей 16 осуществляется с помощью серводвигателя М2. Благодаря перемещению управляющих лопастей 16 изменяется поперечное сечение трубопровода 2. Конечные положения включают максимальное положение открытия трубопровода 2, которое указано на чертеже с помощью управляющих лопастей 16, обозначенных позицией 16b на фиг. 1, и закрытое положение указанного трубопровода 2, которое указано с помощью управляющих лопастей 16, обозначенных позицией 16а на этом же чертеже. В этом варианте осуществления две управляющие лопасти 16 выполнены в виде плоских пластин, которые симметричны относительно продольной оси 18 трубопровода 2. Тем не менее, управляющие лопасти не обязательно должны быть такими, учитывая, что они могут иметь другую неплоскую форму, или в более простом варианте выполнения системы указанные управляющие лопасти могут быть одной управляющей лопастью 16. В концепции изобретения лопасти устройства 14 управления могут иметь множество лопастей с системой открывания и закрывания мембранного типа.
В закрытом положении управляющие лопасти 16 образуют угол α=90° относительно друг друга. Как видно на чертежах, вершина 36 угла а направлена вниз, т.е. в сторону части для наполнения 10 трубопровода 2. Такая конфигурация обеспечивает высокую скорость реагирования. Предпочтительно, чтобы угол α приспособлен к характеристикам текучести продукта и связан с углом внутреннего трения гранулированного продукта, соответствующим углу наклона лопасти относительно направления поперек к продольной оси 18.
С другой стороны, система, кроме того, имеет первый датчик прохождения гранулированного продукта S1, предусмотренный в промежуточной точке 22, расположенной между частями для дозирования и наполнения 4, 10, перед двумя управляющими лопастями 16. В частности, он установлен внутри устройства управления 14 и функционально связан с ним. При этом управляющие лопасти 16 перемещаются, приводятся в действие сервомотором М2, в зависимости от сигнала, полученного от первого датчика S1, как будет описано ниже.
Система дополнительно имеет второй датчик прохождения гранулированного продукта S2, предусмотренный на части для наполнения 10. На фиг. 1 изображено, что второй датчик прохождения гранулированного продукта S2 установлен внутри приемного средства 12. Хотя второй датчик S2 может быть установлен во многих точках на части для наполнения, предпочтительно его устанавливать рядом с входной областью мешка 100, поскольку чем больше первый и второй датчики S1 и S2 разнесены друг относительно друга, тем больше времени реагирования будет у системы в случае, если трубопровод 2 закупорен.
Дозирующее устройство 6, устройство 14 управления и первый и второй датчики S1, S2 функционально связаны друг с другом таким образом, что хранилище 8 дозируемого количества дозирующего устройства 6 перемещается между положениями удержания и выгрузки, а лопасти 16 устройства 14 управления перемещаются в одно положение из множества возможных положений лопастей в зависимости от того, обнаруживают ли первый и второй датчики S1, S2 скопление гранулированного продукта на части 10 для наполнения, которая может приостановить заполнение указанного мешка 100. В машинах, известных из уровня техники, приостановление заполнения мешка 100 вместе с досрочной разгрузкой может привести к объединению двух последовательных дозированных количеств гранулированного продукта. В отличие от этого, система, согласно изобретению, решает эту проблему, несмотря на значительное увеличение скорости заполнения.
Датчики S1 и S2, которые можно использовать, включают большое количество вариантов, таких как оптические датчики, емкостные датчики, инфракрасные датчики, и они отвечают за обеспечение времени прохождения продукта и поступления в различные контрольные точки системы в каждом цикле.
Система управления 1 согласно изобретению установлена в любой упаковочной машине, известной из уровня техники. Например, система может быть установлена на машине FFS, не отображенной на иллюстрациях. Тем не менее, машина не обязательно должна быть такого типа, наиболее вероятно, что система может устанавливаться в любом типе упаковочной машины.
Способ в соответствии с изобретением описан далее. Следует отметить, что на фиг. 1 справа изображено положение зоны прохождения и времени поступления для каждого этапа, чтобы упростить объяснение. В отличие от этого, на остальных иллюстрациях изображены последовательно этапы способа по варианту его осуществления.
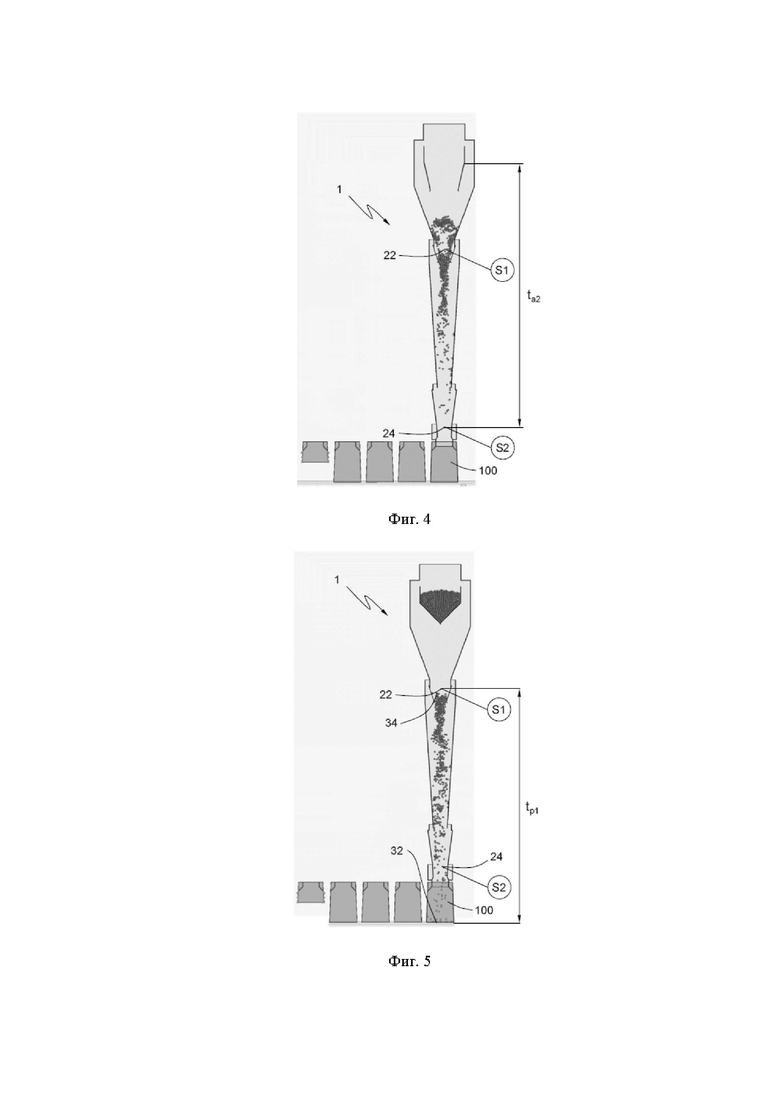
Способ, согласно изобретению, заключается в следующем. Первое дозированное количество D1 сбрасывается через ускорительный трубопровод 2 из точки 20 дозирования на части 4 для дозирования (см. фиг. 2). Эта точка 20 дозирования расположена в дозирующем устройстве 6 с двумя поворотными лопастями хранилища 8 дозируемого количества. В частности, лопасти хранилища 8 дозированного количества поворачиваются вокруг соответствующего вала 26 из закрытого положения, показанного на фиг. 1, в открытое положение очень быстрым движением, обеспечиваемым пневмоцилиндром, не показанным на иллюстрации и приводящим в действие указанные лопасти.
Далее, как показано на фиг. 3, устанавливается прохождение первого дозированного количества D1, которое ранее было выгружено через часть 4 для дозирования из точки 20 измерения. Измерение осуществляется первым датчиком S1 в промежуточной точке 22, расположенной между частями дозирования и наполнения 4, 10. В этой точке расположено устройство управления 14, которое с помощью управляющих лопастей 16 позволяет изменять проходное сечение трубопровода 2 в этой точке.
Далее, как показано на фиг. 3, устанавливается прохождение первого дозированного количества D1, которое ранее было выгружено через часть дозирования 4 из точки 20 измерения. Обнаружение осуществляется первым датчиком S1 в промежуточной точке 22, расположенной между частями дозирования и наполнения 4, 10. В этой точке расположено устройство 14 управления, которое с помощью управляющих лопастей 16 позволяет изменять проходное сечение трубопровода 2 в этой точке.
Далее, прохождение первого дозированного количества D1, которое ранее было выгружено через указанную часть дозирования 4 из точки 20 дозирования, через точку 24 заполнения, расположенную на части 10 наполнения, определяется с помощью второго датчика S2.
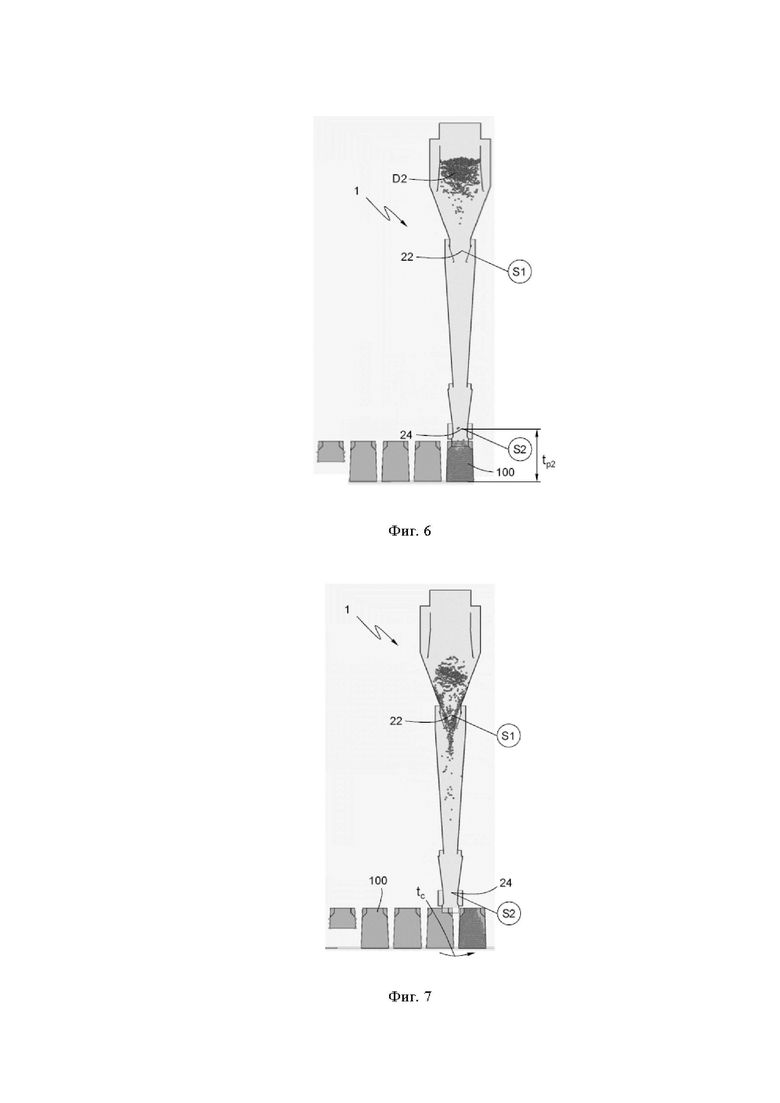
Благодаря этапу измерения можно определить второе время поступления ta2 (фиг. 4) и второе время прохождения tp2 (фиг. 6) первого измеренного количества D1, прохождение которого было установлено на этапе измерения. Второе время поступления ta2 это время, прошедшее между моментом выгрузки первого дозированного количества D1 от части дозирования 4 и моментом обнаружения начальной части 32 дозированного количества D1 в точке 24 заполнения. В свою очередь, время второго прохождения tp2 это время, прошедшее между моментом обнаружения указанной начальной части 32 и моментом обнаружения конечной части 34 первого дозированного количества D1 в точке 24 заполнения.
Выполняется следующий альтернативный этап: если tc+tp2<tu2, выгружается второе дозированное количество D2 гранулированного материала, при этом tc представляет собой заданное время размещения мешка. Этот этап изображен на фиг. 6 и 7. На этом этапе второе дозированное количество D2 проходит через трубопровод 2, но, тем не менее, есть достаточно времени, чтобы закончить заполнение предыдущего мешка первым дозированным количеством D1, удалить заполняемый мешок и поместить другой мешок, который должен быть заполнен вторым дозированным количеством D2, на место заполненного ранее мешка, прежде чем второе дозированное количество покинет трубопровод 2.
Напротив, если tp1<tp2, лопасти 16 закрываются, и проходное сечение промежуточной точки 22 уменьшается, по крайней мере, до тех пор, пока не будет выполнено условие tp1≥tp2. Цель этого условия контроля состоит в том, чтобы приостановить или, при необходимости, задержать прохождение последующего дозированного количества, чтобы облегчить попадание первого дозированного количества D1 в соответствующий мешок.
Этапы, описанные выше, выполняются от первого времени прохождения tp1, второго времени прохождения tp2 и второго времени поступления ta2 одного и того же первого дозированного количества D1. Тем не менее, в альтернативном варианте осуществления изобретения, этапы сравнения времени для принятия решения о частичном или полном закрытии лопастей 16 устройства 14 управления выполняются от второго времени прохождения tp2 первого дозированного количества D1, и первого времени прохождения tp1+1, и второго времени поступления ta2+1 второго дозированного количества D2, следующего за указанным первым дозированным количеством D1.
Исходя из вышеизложенного, выполняется один из следующих альтернативных этапов: если tc+1+tp2<ta2+1, выгружается второе дозированное количество D2 гранулированного продукта, tc+1 это время размещения мешка, в который поступает второе дозированное количество. Напротив, если tp1+1<tp2, лопасти 16 закрываются, и проходное сечение промежуточной точки 22 уменьшается, по крайней мере, до тех пор, пока не будет выполнено условие tp1+1≥tp2.
В другом варианте осуществления изобретения для получения более надежного управления, которое менее чувствительно к неравномерностям потока продукта, указанное время первого и второго прохождения tp1, tp2 и указанное время первого и второго поступления ta1, ta2 рассчитываются как среднее арифметическое времени прохождения и поступления множества ранее отмеренных количеств.
Наконец, время размещения мешка tc может быть заранее определенной константой, но предпочтительно, чтобы оно определялось экспериментально, в то время как второе дозированное количество D2 проходит через указанный ускорительный трубопровод 2. Кроме того, и, как и время поступления и прохождения, время размещения tc также может быть определено как среднее арифметическое времени размещения tc множества предыдущих времен размещения мешков.
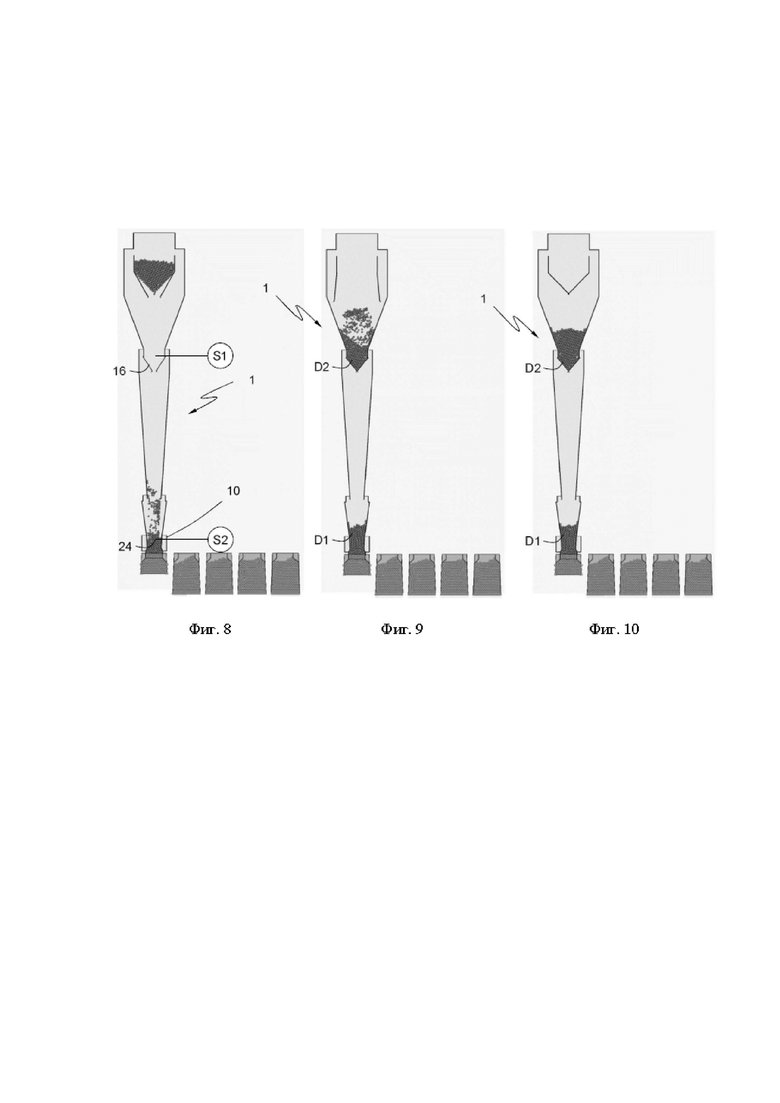
Датчики S1 и S2, установленные в замкнутом контуре, обеспечивают в каждом цикле время прохождения продукта и в конце ускорительного трубопровода 2. С помощью этой информации привод сервомотора М2 будет постепенно регулировать, при необходимости, размер сечения для прохода продукта в трубопроводе 2. Например, время прохождения через первый датчик S1, расположенный на входе в ускорительный трубопровод 2, которое значительно меньше времени прохождения через второй датчик S2, расположенный на части для наполнения, будет указывать на то, что продукт, проходящий через ускорительный трубопровод, замедляется. В результате на входе в ускорительный трубопровод 2 возникает избыточная загрузка и, соответственно, снижается производительность. Эта ситуация отображена на фиг. 8-10. На этих иллюстрациях изображено, как первое дозированное количество D1 постепенно накапливается перед трубопроводом 2. Эта ситуация устанавливается вторым датчиком S2 при условии соблюдения условия tp1<tp2. В результате этой ситуации лопасти 16 закрыты, и, хотя второе дозированное количество D2 уже проходит через трубопровод 2, оно удерживается в устройстве управления 14 (см. фиг. 9 и 10), ожидая устранения закупоривания на части для наполнения 10.
Поэтому и на основе информации, полученной первым и вторым датчиками S1 и S2, система произведет необходимые корректировки в попытке выровнять оба времени, всегда подбирая подходящее регулирование для оптимального процесса производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ НАПОЛНЕНИЯ МЕШКОВ ГРАНУЛИРОВАННЫМ ПРОДУКТОМ И СООТВЕТСТВУЮЩИЙ СПОСОБ НАПОЛНЕНИЯ | 2019 |
|
RU2769589C1 |
| СПОСОБ НАПОЛНЕНИЯ МЕШКОВ ГРАНУЛИРОВАННЫМ ПРОДУКТОМ И СООТВЕТСТВУЮЩАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2794662C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДАВЛЕНИЯ ВОЗДУХА В ШИНАХ | 2012 |
|
RU2542854C1 |
| СПОСОБ И СИСТЕМА РЕГУЛИРОВАНИЯ ДОЗИРОВАНИЯ ХИМИЧЕСКИХ ПРОДУКТОВ | 2017 |
|
RU2727601C1 |
| Портативное устройство для обработки текстильного изделия с датчиком изображения и средствами теплоизоляции | 2020 |
|
RU2764428C1 |
| ДВУХШНЕКОВАЯ СИСТЕМА И СПОСОБ НАПОЛНЕНИЯ ПАКЕТОВ ГИДРОСМЕСЬЮ | 2007 |
|
RU2453483C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАЗРЯДА И ЭЛЕМЕНТ ОТОБРАЖЕНИЯ ПЛАЗМЕННОЙ ПАНЕЛИ | 2003 |
|
RU2254620C2 |
| БЛОК УПРАВЛЕНИЯ, УСТРОЙСТВО ГЕНЕРАЦИИ АЭРОЗОЛЯ, СПОСОБ УПРАВЛЕНИЯ НАГРЕВАТЕЛЕМ, МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ДАННЫХ И КУРИТЕЛЬНОЕ ИЗДЕЛИЕ | 2018 |
|
RU2772840C1 |
| Устройство для наполнения консервных банок жидким продуктом | 1990 |
|
SU1742131A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ПОЛУЧЕНИЯ ЭЛАСТОМЕРНОГО СОСТАВА | 2002 |
|
RU2296047C2 |


Система (1) управления потоком для наполнения мешка (100) гранулированным продуктом, содержащая ускорительный трубопровод (2) с частью (4) для дозирования, где расположено дозирующее устройство (6) и часть (10) для наполнения мешка (100). В промежуточной точке (22) трубопровода (2) предусмотрено устройство управления (14) с подвижными управляющими лопастями (16) и первым датчиком (S1). Второй датчик (S2) предусмотрен на части для наполнения (10). Устройство (14) управления и датчики (S1, S2) функционально связаны друг с другом таким образом, что лопасти (16) указанного устройства (14) управления перемещаются между одним положением из указанного множества положений в зависимости от того, обнаруживают ли упомянутые первый и второй датчики (S1, S2) скопление гранулированного продукта на указанной части (10) для наполнения, которое может задержать заполнение указанного мешка (100). Изобретение также относится к машине и способу наполнения. 3 н. и 10 з.п. ф-лы, 10 ил.
1. Система управления потоком (1) для заполнения мешка (100) гранулированным продуктом, содержащая
[a] ускорительный трубопровод (2) с:
[i] частью для дозирования (4), непосредственно примыкающим к указанной части для дозирования (4) дозирующим устройством (6), содержащим хранилище (8) дозированного количества, перемещаемое между
а) удерживающим положением для хранения дозированного количества продукта и
b) положением для выгрузки указанного количества дозированного продукта, и
[ii] частью для наполнения (10), содержащей приемное средство (12) для приема мешка (100), подлежащего наполнению,
[b] первый датчик прохождения гранулированного продукта (S1) и
[c] второй датчик прохождения гранулированного продукта (S2),
отличающаяся тем, что она дополнительно содержит
[d] устройство (14) управления потоком, указанное устройство (14) управления, предусмотренное между указанной частью для дозирования (4) и указанной частью для наполнения (10) и содержащее, по меньшей мере, одну управляющую лопасть (16), при этом, по меньшей мере, одна управляющая лопасть (16) может перемещаться между множеством положений управления, расположенных между
[i] максимально открытым положением указанного трубопровода (2), в котором максимальный поток указанного гранулированного продукта может проходить через указанное управляющее устройство (14), и
[ii] закрытым положением указанного трубопровода (2), в котором поток указанного гранулированного продукта через устройство управления (14) прерывается,
[е] указанный первый датчик (S1) прохождения гранулированного продукта, предусмотренный в промежуточной точке (22), расположенной между указанными частями для дозирования и наполнения (4, 10), выше по потоку указанной, по меньшей мере, одной управляющей лопасти (16), и функционально связанный с указанным управляющим устройством (14),
[f] указанный второй датчик (S2) прохождения гранулированного продукта, предусмотренный на указанной части (10) для наполнения, и
[g] указанное дозирующее устройство (6), указанное устройство (14) управления и упомянутые первый и второй датчики (S1, S2) функционально связаны друг с другом таким образом, что указанное хранилище дозированного количества (8) указанного дозирующего устройства (6) перемещается между указанными положениями удержания и выгрузки и указанная, по меньшей мере, одна лопасть (16) указанного устройства управления (14) перемещается между одним положением указанного множества положений в зависимости от того, обнаружат ли упомянутые первый и второй датчики (S1, S2) скопление гранулированного продукта на указанной части (10) для наполнения, которое может задержать заполнение указанного мешка (100).
2. Система (1) управления по п. 1, отличающаяся тем, что указанные управляющие лопасти (16) представляют собой две пластины, симметричные относительно продольной оси (18) указанного трубопровода (2), в указанном закрытом положении указанные две пластины образуют относительно друг друга угол (α), менее 180º, вершина (36) которого обращена к указанной части для наполнения (10).
3. Система (1) управления по п. 1 или 2, отличающаяся тем, что поперечное сечение указанного трубопровода (2) сужается от части для дозирования (4) до части для наполнения (10).
4. Система (1) управления по любому из пп. 1-3, отличающаяся тем, что приемные средства (12) содержат откачивающие средства (30), выполненные с возможностью отсасывания для части для наполнения указанного трубопровода (2).
5. Система (1) управления по любому из пп. 1-4, отличающаяся тем, что указанный первый датчик (S1) прохождения гранулированного продукта установлен в указанном устройстве (14) управления.
6. Система (1) управления по любому из пп. 1-5, отличающаяся тем, что указанный второй датчик прохождения гранулированного продукта (S2) установлен в указанном приемном средстве (12).
7. Упаковочная машина, содержащая систему (1) управления потоком по любому из п.п. 1-6 для заполнения мешка (100) гранулированным продуктом.
8. Способ управления потоком для заполнения мешка (100) гранулированным продуктом посредством ускорительного трубопровода (2), указанный ускорительный трубопровод (2) имеет часть для дозирования (4) и часть для наполнения (10) для заполнения указанного мешка (100), в которой расположен исходный мешок, отличающийся тем, что он включает следующие этапы:
[a] выгрузка дозированного количества (D1, D2) гранулированного материала через указанную часть (4) для дозирования из точки (20) дозирования,
[b] измерение прохождения дозированного количества (D1, D2), которое ранее было выгружено через указанную часть для дозирования (4) из указанной точки (20) дозирования, через промежуточную точку (22), расположенную между указанными частями для дозирования и наполнения (4, 10) и имеющую проходное сечение, которое может быть изменено,
[c] определение первого времени поступления (ta1) и первого времени прохождения (tp1) указанного дозированного количества (D1, D2), прохождение которого было измерено на этапе [b], указанное первое время поступления (ta1) представляет собой время, прошедшее между моментом выгрузки указанного дозированного количества (D1, D2) с указанной измерительной частью (4) и моментом обнаружения начальной части (32) указанного дозированного количества (D1, D2) в указанной промежуточной точке (22), и указанное первое время прохождения (tp1) представляет собой время, прошедшее между моментом обнаружения указанной начальной части (32) и моментом обнаружения конечной части (34) указанного дозированного количества (D1, D2) в указанной промежуточной точке (22),
[d] измерение прохождения дозированного количества (D1, D2), которое ранее было выгружено через указанную часть для дозирования (4) из указанной точки (20) дозирования, через точку (24) заполнения, расположенную на указанной части (10) для наполнения,
[e] измерение второго времени поступления (ta2) и второго времени прохождения (tp2) указанного дозированного количества (D1, D2), прохождение которого было обнаружено на этапе [d], указанное второе время поступления (ta2) представляет собой время, прошедшее между моментом выгрузки указанного дозированного количества (D1, D2) из указанной части (4) для дозирования и моментом обнаружения начальной части (32) указанного дозированного количества (D1, D2) в указанной точке заполнения (24), а указанное второе время прохождения (tp2) представляет собой время, прошедшее между моментом обнаружения указанной начальной части (32) и моментом обнаружения конечной части (34) указанного дозированного количества (D1, D2) в указанной точке заполнения (24), таким образом, выполняют следующий альтернативный этап:
[i] если tc + tp2 < tu2, выгружают последующее дозированное количество (D2) гранулированного продукта, при этом tc представляет собой заданное время размещения мешка, в то время как
[ii] если tp1 < tp2, указанное проходное сечение указанной промежуточной точки (22) уменьшают, по крайней мере, до тех пор, пока не будет выполнено условие tp1 ≥ tp2.
9. Способ по п. 8, отличающийся тем, что указанные этапы [ei] и [eii] выполняют от первого времени прохождения (tp1), второго времени прохождения (tp2) и второго времени поступления (ta2) одного и того же первого отмеренного количества (D1).
10. Способ по п. 8, отличающийся тем, что указанные этапы [ei] и [eii] выполняют от второго времени прохождения (tp2) первого измеренного количества, и первого времени прохождения (tp1+1), и второго времени поступления (ta2+1) второго измеренного количества (D2), следующего за указанным первым измеренным количеством (D1).
11. Способ по любому из пп. 8-10, отличающийся тем, что указанное первое и второе время прохождения (tp1, tp2) и указанное первое и второе время поступления (ta1, ta2) рассчитывают как среднее арифметическое времени прохождения и поступления множества времен ранее отмеренных количеств.
12. Способ по любому из пп. 8-11, отличающийся тем, что время размещения мешка (tc) определяют экспериментально, пока указанное второе дозированное количество (D2) проходит через указанный ускорительный трубопровод (2).
13. Способ по п. 12, отличающийся тем, что указанное время размещения tc определяют как среднее арифметическое времени размещения tc множества предыдущих времен размещения мешков.
| Способ получения сложных удобрений,СОдЕРжАщиХ МАгНий | 1979 |
|
SU842087A1 |
| US 2018141690 A1, 24.05.2018 | |||
| US 2010219002 A1, 02.09.2010 | |||
| US 5168906 A, 08.12.1992 | |||
| Опорное приспособление для сверлильных машинок, снабженных двумя рукоятками | 1931 |
|
SU25832A1 |

