Предлагаемое изобретение относится к устройствам преобразования с использованием управляющей схемы, общей для нескольких фаз многофазной системы, и может быть использовано для отслеживания максимальной мощности массива солнечных батарей для трехфазной фотоэлектрической системы, соединенной с сетью.
Известно устройство Photovoltaic grid-connected inverter MPPT (Maximum Power Point Tracking) system based on admittance optimization algorithm (Патент № CN102148507A, China, МПК H02J 3/38, H02N 6/00), содержащее инвертор и устройство для отслеживания точки максимальной мощности массива солнечных батарей с помощью алгоритма проводимости и нечеткого управления.
Однако, в указанной системе управления, точка максимальной мощности определяется исходя из фазных токов и напряжений на выходе инвертора, что снижает скорость и точность отслеживания.
Кроме того, известно устройство Maximum power tracking control method for monopole three-phase photovoltaic grid-connected system (Патент № CN101572417B, China, МПК H02J 3/38), являющийся прототипом предлагаемого изобретения содержащее фотоэлектрический комбинирующий инвертор подключенный к сети и систему управления с двойным замкнутым контуром, состоящую из PI-регулятора по напряжению и синхронного векторного PI –регулятора тока.
Однако в указанном устройстве содержится два PI-регулятора и система отслеживания точки максимальной мощности, что увеличивает время поиска значения максимальной мощности. Также, как следует из описания, используемый метод позволяет отслеживать только наиболее близкую точку к максимальной мощности, следовательно, никогда не находится точке максимума и не позволяет отбирать максимальную энергию от массива солнечных батарей.
Задачей (техническим результатом) предлагаемого изобретения является снижение времени формирования управляющего сигнала и повышение точности определения точки максимальной мощности массива солнечных батарей.
Поставленная задача достигается тем, что: устройство отслеживания точки максимальной мощности для инвертора с питанием от солнечных батарей, содержащее инвертор соединенный с сетью и систему управления, обеспечивающую отслеживание точки максимальной мощности массива солнечных батарей, при этом в систему dq-координат введены три искусственные нейронные сети, для снижения времени формирования управляющего сигнала и достижения максимально возможной мощности массива солнечных батарей в конкретных условиях окружающей среды.
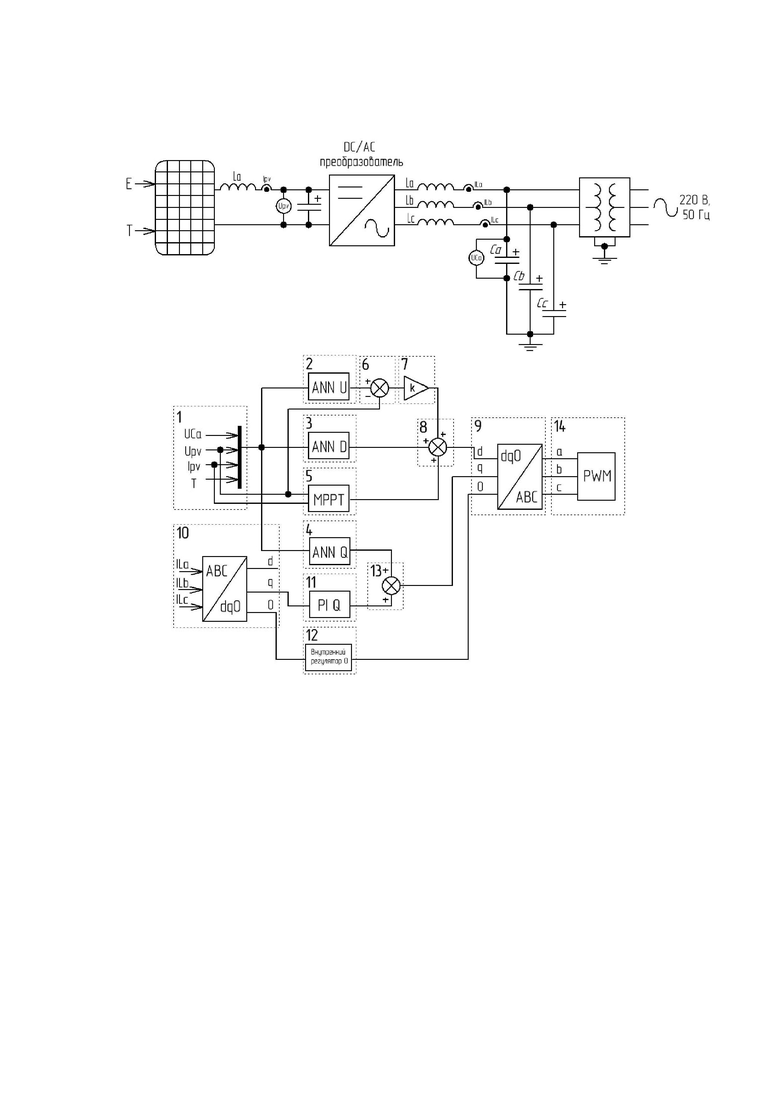
На чертеже приведена структурная схема устройства отслеживания точки максимальной мощности для инвертора с питанием от солнечных батарей.
Предлагаемое устройство (см. чертеж) содержит Блок входных переменных 1 соединенных с искусственными нейронными сетями 2, 3, 4 и с блоком, реализующим алгоритм MPPT 5. В свою очередь, искусственная нейронная сеть 2, через сумматор 6 соединена с блоком переменных 1 и с блоком 7. Далее выходы блока 7, искусственной нейронной сети 3 и MPPT-блока 5 через сумматор 8 соединяются с входом dq0-ABC 9.
Также в схеме присутствует преобразователь ABC-dq0 10, который соединяется с PI-регулятором 11 и регулятором нулевого значения 12. Далее, выходы искусственной нейронной сети 4 и PI-регулятора 11 соединяются через сумматор 13 и вместе с внутренним регулятором нулевого значения 12 соединяются с блоком dq0-ABC 9, который в свою очередь соединяется с ШИМ-модулятором 14.
Устройство работает следующим образом: Формирование сигналов управления происходит в системе координат dq0. Для преобразования из системы координат ABC используется блок ABC-dq0 10, который из соответствующих токов формирует проекцию «d*» ILd, проекцию «q*» ILq и проекцию «0» IL0 обобщенного вектора выходного тока инвертора по формулам:


где
ILA, ILB, ILC – фазные значения выходных токов преобразователя;
ω – циклическая частота выходного напряжения;
t – время.
На выходе преобразователя 10 получаем сигналы d*, q*, 0. Сигнал d* в данной системе управления не используется, а остальные составляющие должны быть сведены к нулю.
Система управления построена на основе искусственных нейронных сетей 3 и 4. Искусственные нейронные сети 3 и 4 на выходе формируют аппроксимированное значение сигнала задания на величину управляющих сигналов d и q соответственно. Значения этих сигналов соответствуют режиму, когда мощность массива солнечных батарей достигает своего максимального значения при наличествующих внешних условиях. Формирование сигналов d и q, с помощью искусственных нейронных сетей, происходит практически мгновенно, за время формирования выходного сигнала нейронной сети, что увеличивает скорость работы системы управления и поиск максимальной мощности массива солнечных батарей.
Для формирования выходного сигнала нейронные сети должны получать входные данные. Для этого в системе управления выделен формирователь входных сигналов 1. В качестве входных данных для искусственных нейронных сетей используются данные о напряжении на одном из выходных конденсаторов, напряжении и токе массива солнечных батарей, температуре окружающей среды.
Искусственная нейронная сеть 2 формирует напряжение, которое должно достигаться в точке максимальной мощности массива солнечных батарей в определенных условиях. Это значение напряжение будет являться сигналом задания. Данная связка блоков выполняет функцию пропорционального регулятора, включающего в себя нейронную сеть 2 предназначенную для ускорения переходного процесса системы, сумматор 6, вычитающий реальное значение напряжения из сигнала задания, формируемого сетью и пропорциональный коэффициент 7.
Также в системе управления присутствует дополнительный блок, реализующий алгоритм отслеживания точки максимальной мощности MPPT 5, задачей которого является коррекция значения d получаемого с выхода искусственной нейронной сети 3. Данный блок может использовать любой алгоритм по поиску точки максимальной мощности солнечной батареи. Следовательно, использование искусственных нейронных сетей увеличивает скорость работы системы управления, а использование дополнительного алгоритма MPPT – точность. Итоговое значение управляющего сигнала d достигается путем сложения сумматором 8 значений с выхода пропорционального звена 7, с выхода нейронной сети 3 и блока MPPT 5.
Составляющая q* должна быть сведена к нулю. Для этого, управляющее значение q формируется с помощью искусственной нейронной сети 4 практически мгновенно, а точность определяется PI-регулятором 11, на который в качестве задания подается ноль. Итоговое значение управляющего сигнала q достигается путем сложения сумматором 13 значений, получаемых с выхода нейронной сети 4 и PI-регулятора 11.
Также в схеме присутствует регулятор нулевой составляющей 12. В качестве которого может использоваться любой блок обеспечивающий нулевое значение.
Итоговые значения dq0 в виде сигналов Ud.ref, Uq.ref, U0.ref, поступают на обратный преобразователь dq0-ABC 9, формирующий три модулирующих сигнала UA.ref, UB.ref, UC.ref, согласно следующим формулам:



Далее формируются управляющие импульсы с помощью ШИМ-модулятора 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВУХУРОВНЕВЫМ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2024 |
|
RU2834583C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХУРОВНЕВЫМ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2024 |
|
RU2834630C1 |
| Способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке | 2018 |
|
RU2697262C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2444833C1 |
| УСТРОЙСТВО ЭЛЕКТРОПИТАНИЯ НА ОСНОВЕ ФОТОЭЛЕКТРИЧЕСКИХ ПАНЕЛЕЙ | 2023 |
|
RU2811080C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ ПРИ ЕЕ НЕСИММЕТРИИ | 2011 |
|
RU2460194C1 |
| СПОСОБ И СИСТЕМА ПАРАЛЛЕЛЬНОГО УПРАВЛЕНИЯ ДЛЯ ОДНОФАЗНЫХ ИНВЕРТОРОВ И ИНВЕРТОР | 2019 |
|
RU2756177C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2442275C1 |
| Способ управления инвертором напряжения в системах накопления электрической энергии при резкопеременной нагрузке | 2020 |
|
RU2733999C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ ПРИ ЕЕ НЕСИММЕТРИИ | 2011 |
|
RU2472269C1 |
Изобретение относится к устройствам преобразования с использованием управляющей схемы, общей для нескольких фаз многофазной системы, и может быть использовано для отслеживания максимальной мощности массива солнечных батарей для трехфазной фотоэлектрической системы, соединенной с сетью. Устройство содержит инвертор, соединенный с сетью, систему управления, обеспечивающую отслеживание точки максимальной мощности массива солнечных батарей. В систему dq-координат введены три искусственные нейронные сети для снижения времени формирования управляющего сигнала и достижения максимально возможной мощности массива солнечных батарей в конкретных условиях окружающей среды. 1 ил.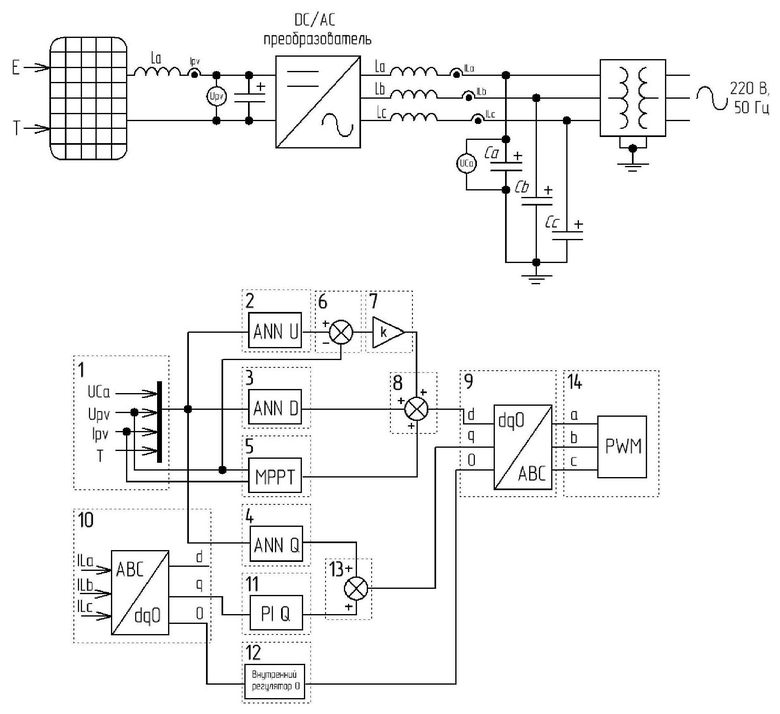
Устройство отслеживания точки максимальной мощности для инвертора с питанием от солнечных батарей, содержащее инвертор, соединенный с сетью, и систему управления, обеспечивающую отслеживание точки максимальной мощности массива солнечных батарей, отличающееся тем, что в систему dq-координат введены три искусственные нейронные сети для снижения времени формирования управляющего сигнала и достижения максимально возможной мощности массива солнечных батарей в конкретных условиях окружающей среды.
| CN 101572417 A, 04.11.2009 | |||
| CN 102148507 A, 10.08.2011 | |||
| CN 108448638 A, 24.08.2018 | |||
| CN 105743120 А, 06.07.2016 | |||
| US 20170271878 A1, 21.09.2017 | |||
| WO 2016078507 А1, 26.05.2016. |

