Изобретение относится к области электротехники и силовой электроники, а именно к преобразованию энергии постоянного тока на входе в энергию переменного тока на выходе с помощью статических преобразователей, выполненных на полупроводниковых приборах с управляющим электродом с использованием приборов типа транзистора, для которых требуется непрерывный управляющий сигнал и может быть использовано для подавления колебаний режимных параметров двухуровневого трехфазного инвертора напряжения.
Известен способ управления двухуровневым трехфазным инвертором напряжения [Система автоматического управления силовым преобразователем на основе свободно конфигурируемой структуры виртуального синхронного генератора Суворов А.А., Аскаров А.Б., Андреев М.В., Бай Ю.Д., Рудник В.Е. Электричество. 2022. №4. С. 15-26], выбранный в качестве прототипа, который заключается в том, что при колебаниях режимных параметров в энергосистеме, к которой подключен двухуровневый трехфазный инвертор напряжения, от датчика частоты подают цифровой сигнал измеренной частоты сети в блок виртуального канала стабилизации, в котором производят преобразование согласно выражению:
 , (1)
, (1)
где GF1, KF, TF1, TF2 - коэффициенты усиления и постоянные времени;
p - оператор дифференцирования;
Δfu - отклонение частоты сети;
UКС - сигнал по напряжению.
Сформированный сигнал напряжения UКС подают в блок воспроизведения виртуального регулятора напряжения, в котором производят преобразование сигнала согласно выражениям:
 , (2)
, (2)
где Uуст - уставка по напряжению;
Uтек - напряжение в месте подключения инвертора к энергосистеме;
Kq - коэффициент статизма по напряжению;
KAPH - постоянная времени интегрирования;
 - опорный сигнал по реактивной мощности.
- опорный сигнал по реактивной мощности.
Сформированный опорный сигнал по реактивной мощности подают в первый сумматор, в котором производят суммирование данного сигнала с уставкой по реактивной мощности Qуст1, просуммированный сигнал по реактивной мощности Qсумм направляют во второй сумматор.
В блоке виртуального автоматического регулятора частоты и мощности, с учетом задаваемых уставок по активной мощности Руст, по частоте сети ωуст,ном, по частоте вращения ротора виртуального синхронного генератора заведенного по обратной связи с блока виртуального ротора ωВСГ, формируют опорное значение имитируемой механической мощности  согласно выражению:
согласно выражению:
 , (3)
, (3)
где ωуст,ном - уставка по частоте сети;
ωВСГ - частота вращения ротора виртуального синхронного генератора;
Kd - коэффициент статизма по частоте;
Руст -уставка по активной мощности.
Сформированный сигнал подают на первый цифровой вход блока виртуального ротора, на второй и третий цифровые входы которого подают сигнала из блока расчета мощности РВСГ и дополнительную уставку по активной мощности Рустдоп. В блоке виртуального ротора формируют два выходных сигнала согласно выражению:
 (4)
(4)
где РВСГ - выходная активная мощность виртуального синхронного генератора;
Рустдоп - дополнительная уставка по активной мощности;
TJ - виртуальная постоянная инерции;
θВСГ - угол ротора виртуального синхронного генератора;
ωб - базисная частота вращения ротора;
ωВСГ - частота вращения ротора виртуального синхронного генератора.
Сформированные сигналы θВСГ и ωВСГ подают в блок решения дифференциальных уравнений контуров электрической машины, в который одновременно подают сигнал от блока управления возбуждением.
В блоке управления возбуждением, принимающем два цифровых сигнала, первый от блока расчета мощности QВСГ и второй в виде уставки по реактивной мощности виртуального синхронного генератора Qуст,ВСГ, формируют результирующее потокосцепление ψf согласно выражению:
 , (5)
, (5)
где QВСГ - выходная реактивная мощность виртуального синхронного генератора;
Qуст, ВСГ - уставка по реактивной мощности виртуального синхронного генератора.
В блоке решения дифференциальных уравнений контуров электрической машины формируют цепь виртуального статора согласно выражениям:
 (6)
(6)
где id,ВСГ - выходной ток виртуального синхронного генератора по оси d;
iq,ВСГ - выходной ток виртуального синхронного генератора по оси q;
Rv - активное сопротивление;
u1d - напряжение по оси d;
u1q - напряжение по оси q;
ψd - потокосцепление по оси d;
ψq - потокосцепление по оси q.
Потокосцепление демпферной обмотки ψQ цепи статора определяют согласно выражению:
 , (7)
, (7)
LQ - индуктивное сопротивление демпферной обмотки;
RQ - активное сопротивление демпферной обмотки.
Одновременно производят формирование выходных токов виртуального синхронного генератора во вращающейся dq-системе координат согласно выражениям:
 (8)
(8)
Lv - индуктивное сопротивление.
Сформированные сигналы тока во вращающейся dq-системе координат подают в блок расчета мощности, где формируют активную РВСГ и реактивную QВСГ мощности виртуального синхронного генератора согласно выражениям:
 (9)
(9)
Сформированные сигналы по реактивной QВСГ и активной РВСГ мощностям виртуального синхронного генератора подают в третий и второй сумматоры, где формируют результирующие опорные значения активной P* и реактивной Q* мощностей, которые подают в блок расчета опорных токов, в котором формируют опорные значения токов согласно выражению:
 , (10)
, (10)
 - опорный ток по оси d;
- опорный ток по оси d;
 - опорный ток по оси q.
- опорный ток по оси q.
Сформированные значения опорных токов подают в блок внутреннего контура управления током, где формируют опорное напряжение во вращающейся dq-системе координат  . Сформированные опорные напряжения Uabc,м подают на цифровой вход блока широтно-импульсной модуляции. В блоке широтно-импульсной модуляции формируют управляющие сигналы для двухуровневого трехфазного инвертора.
. Сформированные опорные напряжения Uabc,м подают на цифровой вход блока широтно-импульсной модуляции. В блоке широтно-импульсной модуляции формируют управляющие сигналы для двухуровневого трехфазного инвертора.
Таким образом, с помощью данного способа осуществляют управление и реализуют демпфирование колебаний режимных параметров двухуровневого трехфазного инвертора напряжения.
Недостатком известного способа является возникновение перерегулирования и длительное время затухания переходного процесса при функционировании двухуровневого трехфазного инвертора напряжения в электрических сетях с низким коэффициентом отношения короткого замыкания, то есть в слабых сетях.
Техническим результатом предложенного способа является расширение арсенала технических средств, позволяющих демпфировать колебания режимных параметров двухуровневого трехфазного инвертора напряжения в электрических сетях с низким коэффициентом отношения короткого замыкания.
Предложенный способ управления двухуровневым трехфазным инвертором напряжения, также как в прототипе, включает измерение частоты сети на выводах двухуровневого трехфазного инвертора напряжения, подключенного к энергосистеме, с учетом которой формируют сигнал по напряжению UКС согласно выражению:
,
где GF1, KF, TF1, TF2 - коэффициенты усиления и постоянные времени;
p - оператор дифференцирования;
Δfu - отклонение частоты сети,
преобразуют его по формуле:
 ,
,
где Uуст - уставка по напряжению;
Uтек - напряжение в месте подключения инвертора к энергосистеме;
Kq - коэффициент статизма по напряжению;
KAPH - постоянная времени интегрирования,
полученный опорный сигнал по реактивной мощности раздельно суммируют с первой уставкой по реактивной мощности Qуст1, получая просуммированный сигнал реактивной мощности Qсумм и суммируют с выходной реактивной мощностью виртуального синхронного генератора QВСГ, получая результирующую опорную реактивную мощность  , формируют опорное значение имитируемой механической мощности согласно выражению:
, формируют опорное значение имитируемой механической мощности согласно выражению:
 ,
,
где ωуст,ном - уставка по частоте сети;
ωВСГ - частота вращения ротора виртуального синхронного генератора;
Kd - коэффициент статизма по частоте;
Руст - уставка по активной мощности,
которое используют для формирования сигналов частоты вращения ротора виртуального синхронного генератора ωВСГ и угла ротора виртуального синхронного генератора θВСГ согласно выражениям:
где РВСГ - выходная активная мощность виртуального синхронного генератора;
Рустдоп -дополнительная уставка по активной мощности;
TJ - виртуальная постоянная инерции;
ωб - базисная частота вращения ротора,
формируют результирующее потокосцепление ψf согласно выражению:
,
где QВСГ - выходная реактивная мощность виртуального синхронного генератора;
Qуст,ВСГ - уставка по реактивной мощности виртуального синхронного генератора,
формируют цепь виртуального статора во вращающейся dq-системе координат согласно выражениям:
где id,ВСГ - выходной ток виртуального синхронного генератора по оси d;
iq,ВСГ - выходной ток виртуального синхронного генератора по оси q;
Rv - активное сопротивление;
u1d - напряжение по оси d;
u1q - напряжение по оси q;
ψd - потокосцепление по оси d;
ψq - потокосцепление по оси q,
и определяют потокосцепление демпферной обмотки цепи статора согласно выражению:
,
где LQ - индуктивное сопротивление демпферной обмотки цепи статора;
RQ - активное сопротивление демпферной обмотки цепи статора,
производят формирование выходных токов виртуального синхронного генератора idq,ВСГ во вращающейся dq-системе координат согласно выражениям:
где Lv - индуктивное сопротивление цепи статора,
формируют выходные активную РВСГ и реактивную QВСГ мощности виртуального синхронного генератора согласно выражениям:
которые суммируют с просуммированным ранее сигналом реактивной мощности Qсумм и с уставкой по активной мощности Руст соответственно, формируют результирующие опорные значения активной P* и реактивной Q* мощностей, формируют опорные значения тока во вращающейся dq-системе координат согласно выражению:
,
где - опорный ток по оси d;
- опорный ток по оси q,
формируют опорное напряжение во вращающейся dq-системе координат , используя которое формируют сигналы опорных напряжений Uabc,м для широтно-импульсной модуляции и управляющие сигналы для баз IGBT транзисторов в двухуровневом трехфазном инверторе напряжения.
Согласно изобретению, сформировав опорное значение имитируемой механической мощности , одновременно формируют сигналы частоты вращения ротора виртуального синхронного генератора ωВСГ и угол ротора виртуального синхронного генератора θВСГ согласно выражениям:
где РВСГ - выходная активная мощность виртуального синхронного генератора;
Рустдоп - дополнительная уставка по активной мощности;
TJ - виртуальная постоянная инерции;
θВСГ - угол ротора виртуального синхронного генератора;
ωб - базисная частота вращения ротора;
ωВСГ - частоты вращения ротора виртуального синхронного генератора;
kω - коэффициент статизма по частоте;
kСПК - коэффициент усиления;
HВСГ - виртуальная инерция виртуального синхронного генератора,
а цифровые сигналы измеренных токов iabc и напряжений uabc на выводах двухуровневого трехфазного инвертора напряжения в течение 23 микросекунд преобразуют из трехфазной системы координат abc во вращающуюся систему координат dq, получая сигналы i1dq и u1dq, которые фильтруют и используют для формирования сигналов выходной активной мощности РВСГ и выходной реактивной мощности QВСГ виртуального синхронного генератора, выходных токов виртуального синхронного генератора id,ВСГ, iq,ВСГ и опорного напряжения во вращающейся dq-системе системе координат. Одновременно в течение 180 микросекунд задают уставку по частоте ωуст,ном и уставку по активной мощности Руст для формирования сигнала имитируемой механической мощности , первую уставку Qуст1 по реактивной мощности для формирования просуммированного сигнала по реактивной мощности Qсумм, вторую уставку по реактивной мощности Qуст2 для формирования сигнала результирующего потокосцепление ψf, дополнительную уставку по активной мощности Рустдоп для формирования сигналов виртуального угла ротора виртуального синхронного генератора θВСГ и частоты вращения ротора виртуального синхронного генератора ωСГ, и используя их полученные значения формируют сигналы опорных напряжений Uabc,м для широтно-импульсной модуляции и управляющие сигналы для баз IGBT транзисторов в двухуровневом трехфазном инверторе напряжения..
Таким образом, по сравнению с прототипом, предлагаемый способ позволяет избежать перерегулирования и добиться снижения времени затухания переходного процесса при функционировании двухуровневого трехфазного инвертора напряжения в электрических сетях с низким коэффициентом отношения короткого замыкания, то есть в слабых сетях.
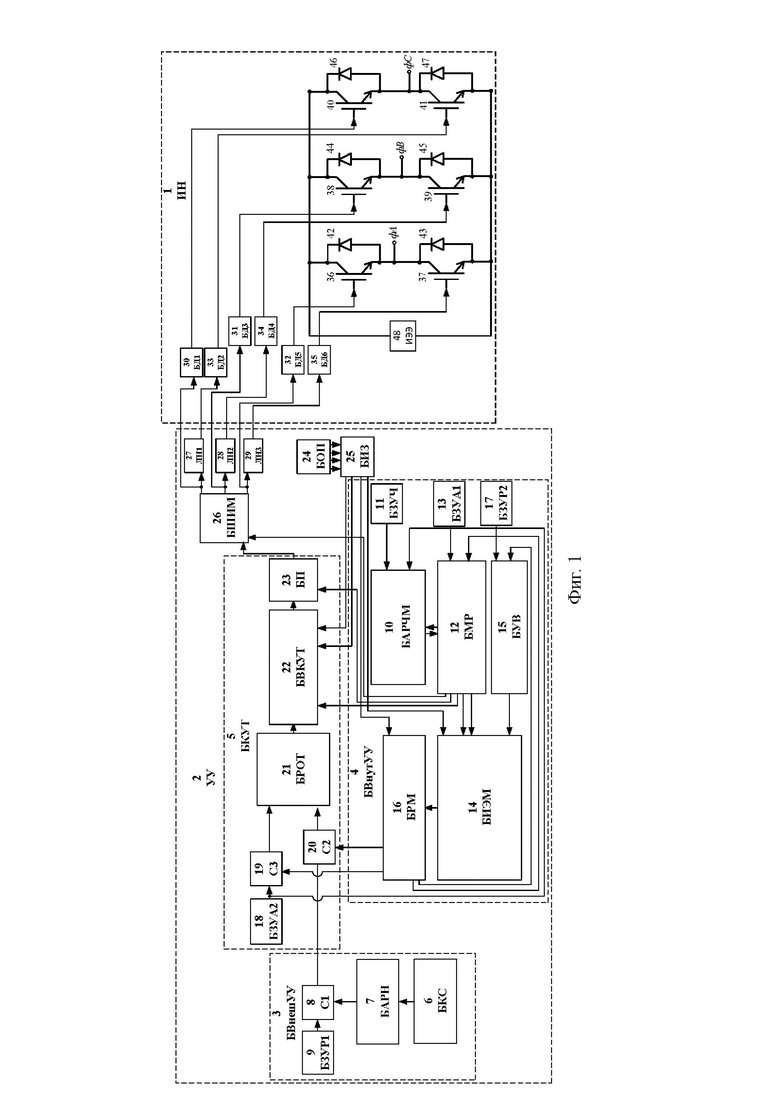
На фиг.1 показана схема устройства для управления двухуровневым трехфазным инвертором напряжения.
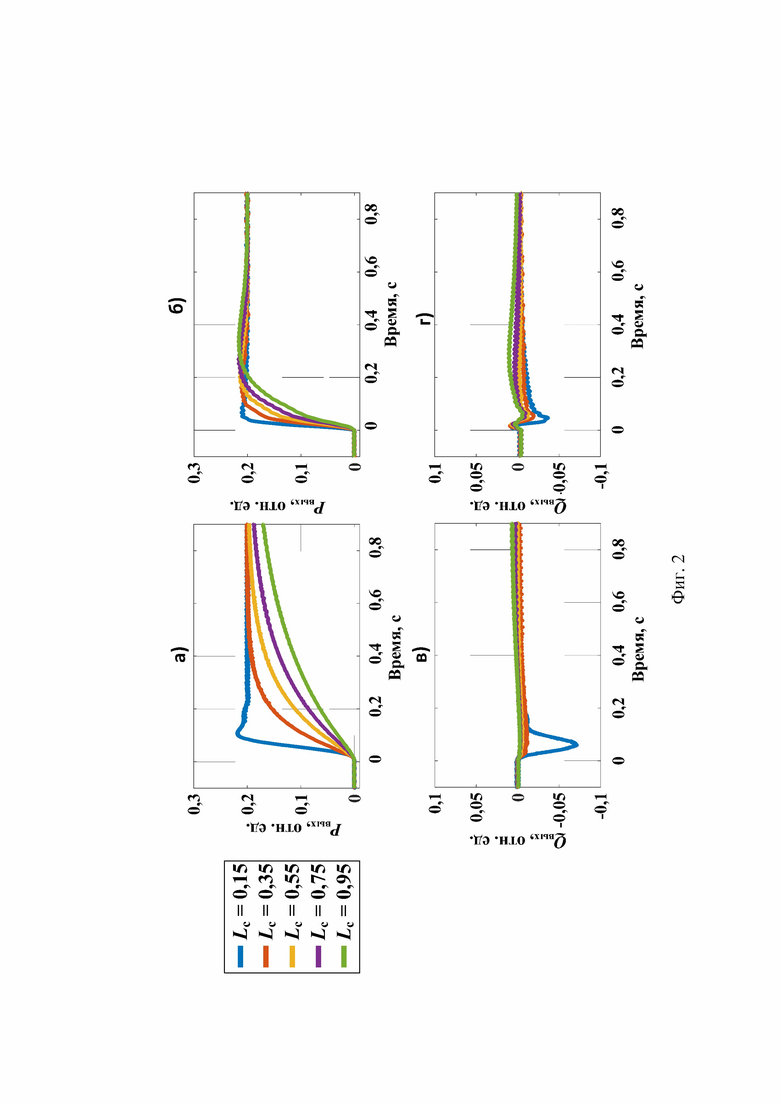
На фиг. 2 приведено сравнение демпфирующих возможностей способа-прототипа и предлагаемого способа при увеличении индуктивного сопротивления сети Lc от 0,15 до 0,95 отн. ед., где а) - зависимость выходной активной мощности от времени двухуровневого трехфазного инвертора напряжения при управлении способом-прототипом; б) - зависимость выходной активной мощности от времени двухуровневого трехфазного инвертора напряжения при управлении предлагаемым способом; в) - зависимость выходной реактивной мощности от времени двухуровневого трехфазного инвертора напряжения при управлением способом-прототипом; г) - зависимость выходной реактивной мощности от времени двухуровневого трехфазного инвертора напряжения при управлении предлагаемым способом.
Устройство для управления двухуровневым трехфазным инвертором напряжения 1 (ИН) содержит устройство управления 2 (УУ), которое содержит блок внешнего уровня управления 3 (БВнешУУ), блок внутреннего уровня управления 4 (БВнутУУ) и блок контура управления током 5 (БКУТ).
Блок внешнего уровня управления 3 (БВнешУУ) содержит блок канала стабилизации 6 (БКС), который соединен с блоком воспроизведения автоматического регулятора напряжения 7 (БАРН), выход которого связан с первым сумматором 8 (С1), к которому подключен первый блок, задающий уставку по реактивной мощности 9 (БЗУР1).
К блоку канала стабилизации 6 (БКС) подключен датчик частоты, который расположен в месте подключения двухуровневого трехфазного инвертора напряжения к энергосистеме (на фиг. 1 не показано).
Блок внутреннего уровня управления 4 (БВнутУУ) содержит блок автоматического регулятора частоты и мощности 10 (БАРЧМ), к входу которого подключен блок, задающий уставку по частоте 11 (БЗУЧ). Выход блока автоматического регулятора частоты и мощности 10 (БАРЧМ) подключен к блоку модели ротора 12 (БМР), к выходу которого подключен первый блок, задающий уставку по активной мощности 13 (БЗУА 1). Первый и второй выходы блока модели ротора 12 (БМР) подключены к блоку имитации электрической машины 14 (БИЭМ), к которому подключен блок управления возбуждением 15 (БУВ). Выход блока имитации электрической машины 14 (БИЭМ) подключен к входу блока расчета мощности 16 (БРМ). Второй блок, задающий уставку по реактивной мощности 17 (ВБУР2), подключен к блоку управления возбуждением 15 (БУВ). Блок модели ротора 12 (БМР) обратной связью соединен с блоком автоматического регулятора частоты и мощности 10 (БАРЧМ).
Блок контура управления током 5 (БКУТ) содержит второй блок, задающий уставку по активной мощности 18 (БЗУА 2), который подключен к входу третьего сумматора 19 (С3) и к входу блока автоматического регулятора частоты и мощности 10 (БАРЧМ). Второй 20 (С2) и третий 19 (С3) сумматоры соединены с блоком расчета опорных токов 21 (БРОТ), который соединен с блоком внутреннего контура управления током 22 (ВКУТ), выход которого подключен к входу блока преобразования цифровых сигналов из вращающейся dq-системы координат в трехфазную abc-систему координат 23 (БП).
Третий, четвертый и пятый выходы блока модели ротора 12 (БМР) подключены соответственно к блоку внутреннего контура управления током 22 (ВКУТ), к блоку преобразования цифровых сигналов из вращающейся dq-системы координат в трехфазную abc-систему координат 23 (БП), к блоку широтно-импульсной модуляции 26 (БШИМ).
Блок обратного преобразования цифровых сигналов из трехфазной abc-системы координат во вращающуюся dq-систему координат 24 (БОП) соединён с блоком инерционного звена 25 (БИЗ), который соединен с блоком имитации электрической машины 14 (БИЭМ), с блоком расчета мощности 16 (БРМ), с двумя цифровыми входами блока внутреннего контура управления током 22 (ВКУТ).
Первый сумматор 8 (С1) связан со вторым сумматором 20 (С2). Блок расчета мощности 16 (БРМ) соединен со вторым 20 (С2) и с третьим 19 (С3) сумматорами, с блоком модели ротора 12 (БМР), блоком управления возбуждением 15 (БУВ).
Выход блока преобразования цифровых сигналов из вращающейся dq-системы координат в трехфазную abc-систему координат 23 (БП) подключен к блоку широтно-импульсной модуляции 26 (БШИМ), выходы которого подключены к первому 27, второму 28 и третьему 29 логическим элементам НЕ (ЛН1-ЛН3), к первому блоку драйверов 30 (БД1), к третьему блоку драйверов 31 (БД3), к пятому блоку драйверов 32 (БД5), первый логический элемент НЕ 27 (ЛН1) подключен ко второму блоку драйверов 33 (БД2), второй логический элемент HE 28 (ЛН2) соединен с четвертым блоком драйверов 34 (БД4), третий логический элемент НЕ 29 (ЛН3) соединен с шестым блоком драйверов 35 (БД6), выходы шести блоков драйверов 30-35 (БД1-БД6) подключены к базам шести IGBT транзисторов 36-41 двухуровневого трехфазного инвертора напряжения 1 (ИН).
Пятый блок драйверов 32 (БД5) подключен к базе первого IGBT транзистора 36, к которому встречно подключен первый обратный диод 42, шестой блок драйверов 35 (БД6) подключен к базе второго IGBT транзистора 37, к которому встречно подключен второй обратный диод 43, третий блок драйверов 31 (БД3) подключен к базе третьего IGBT транзистора 38, к которому встречно подключен третий обратный диод 44, четвертый блок драйверов 34 (БД4) подключен к базе четвертого IGBT транзистора 39, к которому встречно подключен четвертый обратный диод 45, первый блок драйверов 32 (БД1) подключен к базе пятого IGBT транзистора 40, к которому встречно подключен пятый обратный диод 46, второй блок драйверов 33 (БД2) подключен к базе шестого IGBT транзистора 41, к которому встречно подключен шестой обратный диод 47, к общей точке соединения эмиттера каждого IGBT транзистора 36-41 и анода соответствующего диода 42-47 подключен источник электрической энергии 48 (ИЭЭ).
Два IGBT транзистора 36 и 37 с соответствующими встречно подключёнными обратными диодами 42 и 43 соединены последовательно между собой. Два транзистора IGBT 38 и 39 с соответствующими встречно подключёнными обратными диодами 44 и 45 соединены последовательно между собой. Два транзистора IGBT 40 и 41 с соответствующими встречно подключёнными обратными диодами 46 и 47 соединены последовательно между собой.
IGBT транзисторы 36 и 37 с соответствующими встречно подключёнными обратными диодами 42 и 43 подсоединены параллельно к IGBT транзисторам 38 и 39 с соответствующими встречно подключёнными обратными диодами 44 и 45. IGBT транзисторы 38 и 39 со встречно подключёнными обратными диодами 44 и 45 подсоединены параллельно к IGBT транзисторам 40, 41 со встречно подключёнными обратными диодами 46, 47.
Точка соединения эмиттера транзистора 36 и анода диода 42 с точкой соединения коллектора транзистора 37 и катода диода 43 предназначены для подключения к фазе A.
Точка соединения эмиттера транзистора 38 и анода диода 44 с точкой соединения коллектора транзистора 39 и катода диода 45 предназначены для подключения к фазе Б.
Точка соединения эмиттера транзистора 40 и анода диода 46 с точкой соединения коллектора транзистора 41 и катода диода 47 предназначены для подключения к фазе С.
Блок внешнего уровня управления 3 (БВнешУУ), блок внутреннего уровня управления 4 (БВнутУУ), блок контура управления током 5 (БКУТ), блок канала стабилизации 6 (БКС), блок воспроизведения автоматического регулятора напряжения 7 (БАРН), первый сумматором 8 (С1), первый блок, задающий уставку по реактивной мощности 9 (БЗУР1), блок автоматического регулятора частоты и мощности 10 (БАРЧМ), блок, задающий уставку по частоте 11 (БЗУЧ), блок модели ротора 12 (БМР), первый блок, задающий уставку по активной мощности 13 (БЗУА1), блок имитации электрической машины 14 (БИЭМ), блок управления возбуждением 15 (БУВ), блок расчета мощности 16 (БРМ), второй блок, задающий уставку по реактивной мощности 17 (ВБУР2), второй блок, задающий уставку по активной мощности 18 (БЗУА2), второй сумматором 20 (С2), третий сумматор 19 (С3), блок расчета опорных токов 21 (БРОТ), блок внутреннего контура управления током 22 (БВКУТ), блок преобразования цифровых сигналов из вращающейся dq-системы координат в трехфазную abc-систему координат 23 (БП), блок обратного преобразования цифровых сигналов из трехфазной abc-системы координат во вращающуюся dq-систему координат 24 (БОП), блок инерционного звена 25 (БИЗ), блок широтно-импульсной модуляции 26 (БШИМ), первый логический элемент НЕ 27 (ЛН1), второй логический элемента НЕ 28 (ЛН2), третий логический элемента НЕ 29 (ЛН3) могут быть выполнены на базе микроконтроллера, например, STM32F0, фирмы STMicroelectronics, на ядре CortexM0. Первый блок драйверов 30 (БД1), третий блок драйверов 31 (БД3), пятый блок драйверов 32 (БД5), второй блок драйверов 33 (БД2), четвертый блок драйверов 34 (БД4), шестой блок драйверов 35 (БД6) могут быть выполнены на базе двухканального драйвера 2629КР01Н3.
Двухуровневый трехфазный инвертор напряжения 1 (ИН) с шестью IGBT транзисторами и шестью встречно подключенными к ним обратными диодами известен из предшествующего уровня техники [P. M. Koumba, A. Cheriti, M. L. Doumbia, A. El Moubarek Bouzid and H. Chaoui, "Wind turbine control based on a permanent magnet synchronous generator connected to an Isolated electrical network," 2017 IEEE Electrical Power and Energy Conference (EPEC), Saskatoon, SK, Canada, 2017, pp. 1-7.].
При возникновении колебаний режимных параметров в энергосистеме, к которой подключен двухуровневый трехфазный инвертор напряжения, от датчика частоты, расположенного в месте подключения двухуровневого трехфазного инвертора напряжения к энергосистеме, подают цифровой сигнал измеренной частоты сети в блок канала стабилизации 6 (БКС), в котором производят преобразование согласно выражению (1):
,
где GF1, KF, TF1, TF2 - коэффициенты усиления и постоянные времени;
p - оператор дифференцирования;
Δfu - отклонение частоты сети;
UКС - сигнал по напряжению.
Сформированный сигнал по напряжению UКС подают в блок воспроизведения автоматического регулятора напряжения 7 (БАРН), в котором происходит преобразование сигнала согласно выражению (2):
,
где Uуст - уставка по напряжению;
Uтек - напряжение в месте подключения инвертора к энергосистеме;
Kq - коэффициент статизма по напряжению;
KAPH - постоянная времени интегрирования;
- опорный сигнал по реактивной мощности.
Сформированный сигнал по реактивной мощности подают на первый вход первого сумматора 8 (С1), одновременно на второй вход которого подают уставку от первого блока, задающего уставку по реактивной мощности 9 (БЗУР1) Qуст1 в течение 180 микросекунд, далее просуммированный сигнал по реактивной мощности Qсумм направляют на первый вход второго сумматора 20 (С2).
В блоке автоматического регулятора частоты и мощности 10 (БАРЧМ), с учетом задаваемых уставок из второго блока задающего уставку по активной мощности 18 (БЗУА 2) Руст в течение 180 микросекунд, из блока, задающего уставку по частоте сети 11 (БЗУЧ) ωуст,ном в течение 180 микросекунд, и с учетом обратной связи с блоком модели ротора 12 (БМР) формируют опорное значение имитируемой механической мощности согласно выражению (3):
 ,
,
где ωуст,ном - уставка по частоте сети;
ωВСГ - частота вращения ротора виртуального синхронного генератора;
Kd - коэффициент статизма по частоте;
Руст - уставка по активной мощности.
Сформированный сигнал  подают в блок модели ротора 12 (БМР), который одновременно с этим принимает два цифровых сигнала: первый от блока расчета мощности 16 (БРМ) и второй от первого блока, задающего уставку по активной мощности 13 (БЗУА1) Рустдоп в течение 180 микросекунд, и формируют два выходных сигнала: частоту вращения ротора виртуального синхронного генератора ωВСГ и угол ротора виртуального синхронного генератора θВСГ согласно выражениям:
подают в блок модели ротора 12 (БМР), который одновременно с этим принимает два цифровых сигнала: первый от блока расчета мощности 16 (БРМ) и второй от первого блока, задающего уставку по активной мощности 13 (БЗУА1) Рустдоп в течение 180 микросекунд, и формируют два выходных сигнала: частоту вращения ротора виртуального синхронного генератора ωВСГ и угол ротора виртуального синхронного генератора θВСГ согласно выражениям:
 (11)
(11)
где РВСГ - выходная активная мощность виртуального синхронного генератора;
Рустдоп - дополнительная уставка по активной мощности;
TJ - виртуальная постоянная инерции;
θВСГ - угол ротора виртуального синхронного генератора;
ωб - базисная частота вращения ротора;
ωВСГ - частота вращения ротора виртуального синхронного генератора;
kω - коэффициент статизма по частоте;
kСПК - коэффициент усиления;
HВСГ = TJ,ВСГ/2 - виртуальная инерция виртуального синхронного генератора.
Одновременно в блок внутреннего контура управления током 22 (ВКУТ) подают сформированный сигнал частоты вращения виртуального синхронного генератора ωВСГ, в блок преобразования цифровых сигналов из вращающейся dq-системы координат в трехфазную abc-систему координат 23 (БП) подают сигнал сформированного угла ротора виртуального синхронного генератора θВСГ, в блок имитации электрической машины 14 (БИЭМ) подают сигналы ωВСГ и θВСГ, в который одновременно подают сигнал из блока управления возбуждением 15 (БУВ). Одновременно с этим блок управления возбуждением 15 (БУВ), принимающий два цифровых сигнала: первый от блока расчета мощности 16 (БРМ) и второй от второго блока, задающего уставку по реактивной мощности 17 (БЗУР2) Qуст2 в течение 180 микросекунд, формирует результирующее потокосцепление ψf согласно выражению (5):
,
где - опорный сигнал по реактивной мощности;
QВСГ - выходная реактивная мощность виртуального синхронного генератора;
Qуст,ВСГ - уставка по реактивной мощности виртуального синхронного генератора.
В блоке обратного преобразования цифровых сигналов из трехфазной abc-системы координат во вращающуюся dq-систему координат 24 (БОП) из сигналов токов iabc и напряжений uabc в течение 23 микросекунды формируют сигналы тока i1dq и напряжений u1dq в dq координатах, согласно измеренным значениям токов и напряжений с датчиков в месте подключения двухуровневого трехфазного инвертора напряжения 1 (ИН) к энергосистеме. Сформированные сигналы токов i1dq и напряжений u1dq подают в блок инерционного звена 25 (БИЗ) и далее отфильтрованные сигналы напряжений u1dq подают в блок имитации электрической машины 14 (БИЭМ), в блок расчета мощности 16 (БРМ) и в блок внутреннего контура управления током 22 (БВКУТ), в который также подают отфильтрованные сигналы токов i1dq.
В блоке имитации электрической машины 14 (БИЭМ) используется четырехконтурная схема. Продольная ось d принята опережающей поперечную ось q на 90°. Используют сигналы по напряжению u1d и u1q во вращающейся dq-системе координат для формирования цепи виртуального статора согласно выражениям (6):
где id,ВСГ - выходной ток виртуального синхронного генератора по оси d;
iq,ВСГ - выходной ток виртуального синхронного генератора по оси q;
Rv - активное сопротивление;
u1d - напряжение по оси d;
u1q - напряжение по оси q;
ψd - потокосцепление по оси d;
ψq - потокосцепление по оси q.
Потокосцепление демпферной обмотки цепи статора определяют согласно выражению (7):
,
где LQ - индуктивное сопротивление демпферной обмотки;
RQ - активное сопротивление демпферной обмотки.
Одновременно происходит формирование выходных токов виртуального синхронного генератора idq,ВСГ, которые определяют согласно выражениям (8):
где Lv - индуктивное сопротивление.
и подают в блок расчета мощности 16 (БРМ).
Расчет выходных мощностей виртуального синхронного генератора РВСГ и QВСГ осуществляют в блоке расчета мощности 16 (БРМ) согласно выражениям (9):
Полученные сигналы по реактивной QВСГ мощности подают в блок управления возбуждением 15 (БУВ) и на второй вход второго сумматора 20 (С2). Сигнал по активной мощности виртуального синхронного генератора РВСГ подают в блок модели ротора 12 (БМР) и на второй вход третьего сумматора 19 (С1), одновременно с этим на первый вход третьего сумматора 19 (С3) подают сигнал из второго блока, задающего уставку по активной мощности 18 (БЗУА2) Руст за время 180 микросекунд.
В третьем 19 (С3) и втором 20 (С2) сумматорах формируют результирующие опорные значения активных P* и реактивных Q* мощностей, которые подают в блок расчета опорных токов 21 (БРОТ), в котором одновременно формируют опорные токи  согласно выражению (10):
согласно выражению (10):
,
где - опорный ток по оси d;
- опорный ток по оси q.
Сформированный сигнал опорного тока подают в блок внутреннего контура управления током 22 (БВКУТ), в котором формируют опорные напряжения  во вращающейся dq-системе координат. Сформированные опорные напряжения подают в блок преобразования цифровых сигналов из вращающейся dq-системы координат в трехфазную abc-систему координат 23 (БП), и далее сформированный сигнал Uabc,м подают на цифровой вход блока широтно-импульсной модуляции 26 (БШИМ). В блоке широтно-импульсной модуляции 26 (БШИМ), в который также подают сигнал по углу ротора виртуального синхронного генератора θВСГ, формируют электрические управляющие сигналы для шести драйверов управления 30-35 (БД1-БД6), которые подключены к базам IGBT транзисторов 36-41.
во вращающейся dq-системе координат. Сформированные опорные напряжения подают в блок преобразования цифровых сигналов из вращающейся dq-системы координат в трехфазную abc-систему координат 23 (БП), и далее сформированный сигнал Uabc,м подают на цифровой вход блока широтно-импульсной модуляции 26 (БШИМ). В блоке широтно-импульсной модуляции 26 (БШИМ), в который также подают сигнал по углу ротора виртуального синхронного генератора θВСГ, формируют электрические управляющие сигналы для шести драйверов управления 30-35 (БД1-БД6), которые подключены к базам IGBT транзисторов 36-41.
Таким образом, с помощью предлагаемого способа реализуют управление и корректное демпфирование колебаний без возникновения перерегулирования и увеличения времени затухания переходного процесса при функционировании двухуровневого трехфазного инвертора напряжения в электрических сетях с низким коэффициентом отношения короткого замыкания.
В качестве возмущения воспроизводили увеличение уставки активной мощности Руст от 0 до 0,2 отн. ед., используя способ-прототип и используя второй блок, задающий уставку по активной мощности 18 (БЗУА2) согласно предлагаемому способу. При управлении двухуровневым трехфазным инвертором напряжения способом-прототипом, как показано на фиг. 2 а), происходит увеличение индуктивного сопротивления сети Lc, к которой подключен двухуровневый трехфазный инвертор напряжения, от 0,15 до 0,95 отн. ед., что приводит к снижению коэффициента отношения короткого замыкания и соответственно к снижению силы сети, и характерно существенное увеличение времени набора мощности за время, равное 0,9 секунды. При осуществлении способа-прототипа в условиях сильной сети при значении Lc=0,15 отн. ед. проявляется взаимовлияние мощностей, в результате чего происходит существенное отклонение реактивной мощности, как показано на фиг. 2 в). Для предлагаемого способа, увеличение времени набора мощности является незначительным и составляет 0,15 секунды, как показано на фиг. 2 б). В случае предлагаемого способа качество демпфирования колебаний при постоянном значении коэффициента усиления kСПК (из выражения 11) остается на высоком уровне при любом изменении индуктивного сопротивления сети Lc. Величина перерегулирования практически неизменна. Полученные кривые реактивной мощности, как показано на фиг. 2 г), подтверждают, что в предлагаемом способе управления взаимовлияние мощностей является незначительным. Таким образом, предлагаемый способ не оказывает негативного влияния на качество динамического отклика в сильной и слабой сети и не вызывает проблемы взаимовлияния мощностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХУРОВНЕВЫМ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2024 |
|
RU2834630C1 |
| Способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке | 2018 |
|
RU2697262C1 |
| Способ управления инвертором напряжения в системах накопления электрической энергии при резкопеременной нагрузке | 2020 |
|
RU2733999C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ТОКА ПРИ ПЕРЕХОДЕ В РЕЖИМ ПЕРЕГРУЗКИ | 2012 |
|
RU2522036C2 |
| Smart-инвертор для поддержания норм качества электрической энергии в распределительных сетях электроснабжения 0,4 кВ их установленным значениям и интеллектуально-автоматизированная система управления электрическими сетями на базе Smart-инвертора | 2024 |
|
RU2835155C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483421C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483422C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2438229C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
Изобретение относится к области электротехники и силовой электроники, а именно к преобразованию энергии постоянного тока на входе в энергию переменного тока на выходе с помощью статических преобразователей, для которых требуется непрерывный управляющий сигнал. Способ управления двухуровневым трехфазным инвертором напряжения включает измерение частоты сети на выводах двухуровневого трехфазного инвертора напряжения, подключенного к энергосистеме, с учетом которой формируют сигнал по напряжению, который используют для получения опорного сигнала по реактивной мощности, который раздельно суммируют с первой уставкой по реактивной мощности, получая просуммированный сигнал реактивной мощности, и суммируют с выходной реактивной мощностью виртуального синхронного генератора, получая результирующую опорную реактивную мощность. При этом формируют опорное значение имитируемой механической мощности, которое используют для формирования сигналов частоты вращения ротора виртуального синхронного генератора и угла ротора виртуального синхронного генератора, а цифровые сигналы измеренных токов и напряжений на выводах двухуровневого трехфазного инвертора напряжения в течение 23 мкс преобразуют из трехфазной системы координат abc во вращающуюся систему координат dq, получая сигналы токов и напряжений, которые фильтруют и используют для формирования сигналов выходных активной и реактивной мощностей, выходных токов виртуального синхронного генератора и опорного напряжения во вращающейся dq-системе координат. Одновременно в течение 180 мкс задают уставку по частоте и по активной мощности для формирования сигнала имитируемой механической мощности, первую уставку по реактивной мощности для формирования просуммированного сигнала по реактивной мощности, вторую уставку по реактивной мощности для формирования сигнала результирующего потокосцепления, дополнительную уставку по активной мощности для формирования сигналов виртуального угла и частоты вращения ротора виртуального синхронного генератора. Одновременно формируют результирующее потокосцепление, цепь виртуального статора во вращающейся dq-системе координат и определяют потокосцепление демпферной обмотки цепи статора. Выходные активную и реактивную мощности виртуального синхронного генератора суммируют с просуммированным ранее сигналом реактивной мощности и с уставкой по активной мощности соответственно. Формируют результирующие опорные значения активной и реактивной мощностей, тока и опорное значение напряжения во вращающейся dq-системе координат, используя которое формируют сигналы опорных напряжений для широтно-импульсной модуляции и управляющие электрические сигналы для баз IGBT транзисторов в двухуровневом трехфазном инверторе напряжения. Технический результат: расширение арсенала технических средств, позволяющих демпфировать колебания режимных параметров двухуровневого трехфазного инвертора напряжения в электрических сетях с низким коэффициентом отношения короткого замыкания. 2 ил.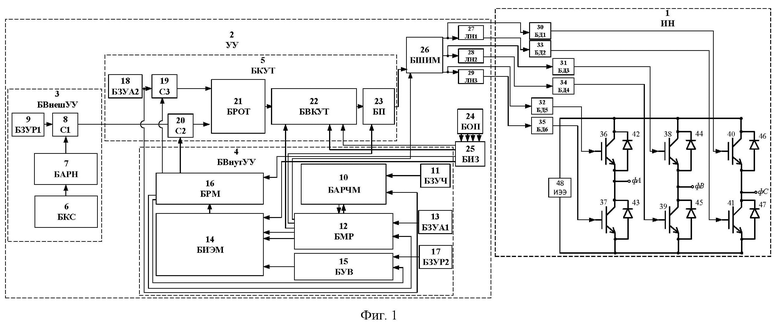
Способ управления двухуровневым трехфазным инвертором напряжения, включающий измерение частоты сети на выводах двухуровневого трехфазного инвертора напряжения, подключенного к энергосистеме, с учетом которой формируют сигнал по напряжению UКС согласно выражению
 ,
,
где GF1, KF, TF1, TF2 – коэффициенты усиления и постоянные времени;
p – оператор дифференцирования;
Δfu – отклонение частоты сети,
преобразуют его по формуле
 ,
,
где Uуст – уставка по напряжению;
U тек – напряжение в месте подключения инвертора к энергосистеме;
Kq – коэффициент статизма по напряжению;
K АРН – постоянная времени интегрирования,
полученный опорный сигнал по реактивной мощности  раздельно суммируют с первой уставкой по реактивной мощности Qуст1, получая просуммированный сигнал реактивной мощности Qсумм и суммируют с выходной реактивной мощностью виртуального синхронного генератора QВСГ, получая результирующую опорную реактивную мощность
раздельно суммируют с первой уставкой по реактивной мощности Qуст1, получая просуммированный сигнал реактивной мощности Qсумм и суммируют с выходной реактивной мощностью виртуального синхронного генератора QВСГ, получая результирующую опорную реактивную мощность  , формируют опорное значение имитируемой механической мощности
, формируют опорное значение имитируемой механической мощности  согласно выражению
согласно выражению
 ,
,
где ωуст,ном – уставка по частоте сети;
ω ВСГ – частота вращения ротора виртуального синхронного генератора;
Kd – коэффициент статизма по частоте;
P уст – уставка по активной мощности,
которое используют для формирования сигналов частоты вращения ротора виртуального синхронного генератора ωВСГ и угла ротора виртуального синхронного генератора θВСГ согласно выражениям
где PВСГ – выходная активная мощность виртуального синхронного генератора;
P устдоп –дополнительная уставка по активной мощности;
TJ – виртуальная постоянная инерции;
ωб – базисная частота вращения ротора,
формируют результирующее потокосцепление ψf согласно выражению
 ,
,
где QВСГ – выходная реактивная мощность виртуального синхронного генератора;
Q уст,ВСГ – уставка по реактивной мощности виртуального синхронного генератора,
формируют цепь виртуального статора во вращающейся dq-системе координат согласно выражениям
где id,ВСГ – выходной ток виртуального синхронного генератора по оси d;
iq, ВСГ – выходной ток виртуального синхронного генератора по оси q;
Rv – активное сопротивление;
u1d – напряжение по оси d;
u1q – напряжение по оси q;
ψd – потокосцепление по оси d;
ψq – потокосцепление по оси q,
и определяют потокосцепление демпферной обмотки цепи статора согласно выражению
 ,
,
где LQ – индуктивное сопротивление демпферной обмотки цепи статора;
RQ – активное сопротивление демпферной обмотки цепи статора,
производят формирование выходных токов виртуального синхронного генератора idq,ВСГ во вращающейся dq-системе координат согласно выражениям
где Lv – индуктивное сопротивление цепи статора,
формируют выходные активную PВСГ и реактивную QВСГ мощности виртуального синхронного генератора согласно выражениям
которые суммируют с просуммированным ранее сигналом реактивной мощности Qсумм и с уставкой по активной мощности Pуст соответственно, формируют результирующие опорные значения активной P* и реактивной Q* мощностей, формируют опорные значения тока во вращающейся dq-системе координат согласно выражению
 ,
,
где  – опорный ток по оси d;
– опорный ток по оси d;
 – опорный ток по оси q,
– опорный ток по оси q,
формируют опорное напряжение во вращающейся dq-системе координат  , используя которое формируют сигналы опорных напряжений Uabc,м для широтно-импульсной модуляции и управляющие сигналы для баз IGBT транзисторов в двухуровневом трехфазном инверторе напряжения, отличающийся тем, что, сформировав опорное значение имитируемой механической мощности , одновременно формируют сигналы частоты вращения ротора виртуального синхронного генератора ωВСГ и угла ротора виртуального синхронного генератора θВСГ согласно выражениям
, используя которое формируют сигналы опорных напряжений Uabc,м для широтно-импульсной модуляции и управляющие сигналы для баз IGBT транзисторов в двухуровневом трехфазном инверторе напряжения, отличающийся тем, что, сформировав опорное значение имитируемой механической мощности , одновременно формируют сигналы частоты вращения ротора виртуального синхронного генератора ωВСГ и угла ротора виртуального синхронного генератора θВСГ согласно выражениям
где PВСГ – выходная активная мощность виртуального синхронного генератора;
P устдоп – дополнительная уставка по активной мощности;
TJ – виртуальная постоянная инерции;
θ ВСГ – угол ротора виртуального синхронного генератора;
ωб – базисная частота вращения ротора;
ωВСГ – частота вращения ротора виртуального синхронного генератора;
k ω – коэффициент статизма по частоте;
k СПК – коэффициент усиления;
H ВСГ – виртуальная инерция виртуального синхронного генератора,
а цифровые сигналы измеренных токов iabc и напряжений uabc на выводах двухуровневого трехфазного инвертора напряжения в течение 23 мкс преобразуют из трехфазной системы координат abc во вращающуюся систему координат dq, получая сигналы i1dq и u1dq, которые фильтруют и используют для формирования сигналов выходной активной мощности PВСГ и выходной реактивной мощности QВСГ виртуального синхронного генератора, выходных токов виртуального синхронного генератора id,ВСГ, iq,ВСГ и опорного напряжения во вращающейся dq-системе координат, одновременно в течение 180 мкс задают уставку по частоте ωуст,ном и уставку по активной мощности Pуст для формирования сигнала имитируемой механической мощности , первую уставку Qуст1 по реактивной мощности для формирования просуммированного сигнала по реактивной мощности Qсумм, вторую уставку по реактивной мощности Qуст2 для формирования сигнала результирующего потокосцепления ψf, дополнительную уставку по активной мощности Pустдоп для формирования сигналов виртуального угла ротора виртуального синхронного генератора θВСГ и частоты вращения ротора виртуального синхронного генератора ωВСГ и, используя их полученные значения, формируют сигналы опорных напряжений Uabc,м для широтно-импульсной модуляции и управляющие сигналы для баз однонаправленных IGBT транзисторов в двухуровневом трехфазном инверторе напряжения.
| US 20100110743 A1, 06.05.2010 | |||
| Способ управления трехфазным инвертором напряжения | 2023 |
|
RU2808093C1 |
| RU 197183 U1, 08.04.2020 | |||
| МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С ДИФФЕРЕНЦИРОВАННЫМИ НАПРЯЖЕНИЯМИ УРОВНЕЙ И БАЙПАСНЫМИ ПОЛУПРОВОДНИКОВЫМИ КЛЮЧАМИ | 2012 |
|
RU2510769C1 |
| Источник питания для индуктора | 2017 |
|
RU2680715C1 |

