Предлагаемое изобретение относится к области электротехники и силовой электроники, может быть использовано при построении систем генерирования электрической энергии трехфазного переменного тока или систем гарантированного электропитания переменного тока, в которых для повышения бесперебойности электроснабжения, стабилизации уровня загрузки источника, снижения потребляемой от источника реактивной мощности применяется накопитель электрической энергии на основе инвертора напряжения и аккумуляторной батареи и может быть использовано в системах с первичными источниками такими как трехпроводная сеть промышленной частоты, мотор-генераторные установки.
Известен способ управления трехфазным инвертором напряжения в составе активного фильтра [Akagi, Н. "Instantaneous Power Theory and Applications to Power Conditioning" / H. Akagi, E.H. Watanabe, M. Aredes // IEEE Press Series on Power Engineering. Wiley, 2007, P. 400], при котором сигналы обратной связи по току и напряжению в цепи нагрузки преобразуют d- и q- проекции обобщенного вектора, вычисляют активную, реактивную и пульсационные составляющие мгновенной мощности, на основе которых рассчитывают действительную и мнимую мгновенную мощность. В рамках данной теории, которая получила название p-q-теория вычисления мгновенной мощности, задания на d- и q-проекции тока в выходной цепи инвертора вычисляют из инверсных значений реактивной и переменных составляющих мгновенных мощностей.
Однако в указанном способе не рассматривается скорость нарастания мощности источника питания, что является важным параметром для источников питания с ограничениями по максимальной мощности и/или с инерционностью в звене регулирования. В случае резкопеременной нагрузки в таких источниках питания могут возникнуть аварийные срабатывания защитного оборудования, просадка/выбросы по амплитуде и/или частоте напряжения источника питания, что снижает показатели качества электроснабжения.
Кроме того известен способ управления трехфазным инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке (Способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке: пат. 2697262 Рос. Федерация. №2018119777; заявл. 29.05.2018; опубл. 13.08.2019, Бюл. №23), являющийся прототипом предлагаемого изобретения и заключающийся в том, что в качестве сигнала задания на действительную и мнимую составляющие мгновенной мощности в цепи источника питания используют сигналы обратной связи по действительной и мнимой мгновенной мощности нагрузки, преобразованные при помощи фильтров нижних частот.
Однако, указанный способ управления имеет экспоненциально изменяющуюся скорость изменения мощности источника питания. Таким образом, мощность источника питания в начале переходного процесса имеет высокую скорость изменения, что негативно отражается на частоте и амплитуде напряжения. С другой стороны, в конце переходного процесса проявляется затягивание режима малых мощностей, что отражается на гармоническом составе выходного тока. При этом длительность переходного процесса не зависит от величины перепада мощности в нагрузке.
Задачей (техническим результатом) предлагаемого изобретения является линейное изменение мощности источника питания при неизменной скорости изменения мощности нагрузки.
Поставленная задача достигается тем, что в известном способе управления преобразователем напряжения для формирования сигнала задания на скорость нарастания соответствующей мгновенной мощности источника питания определяют полярность и величину изменения мощности нагрузки в двух ортогональных проекциях, фиксируют полярность изменения мощности нагрузки в двух ортогональных проекциях, умножают сигнал полярности мощности нагрузки в двух ортогональных проекциях на сигнал с выхода компаратора сравнения сигнала обратной связи по соответствующей ортогональной проекции мощности инвертора напряжения и сигнала задания на минимальный уровень данной составляющей мощности инвертора, умножают на задание на величину скорости изменения мощности источника питания в двух ортогональных проекциях, формируют линейно изменяющееся задание на мощность источника питания в двух ортогональных проекциях.
На фиг. 1 представлена одна из возможных структурных схем, реализующая предлагаемый способ управления инвертором напряжения. На фиг. 2 представлена структурная схема системы регулирования. На фиг. 3 представлена структурная схема системы формирования задания на скорость изменения мгновенной мощности источника питания.
Устройство (фиг. 1) содержит силовую схему (блок 1) и систему управления (блок 2). Силовая схема содержит инвертор напряжения (блок 3), три выхода стоек которого соединены с входами низкочастотного фильтра (блок 4), а выходы последнего через датчики тока (блоки 5, 6, 7) подключены к общей точке соединения источника трехфазного напряжения (блок 8) и нагрузки (блок 9). Нагрузка подключена к общей точке через датчики тока (блоки 10, 11, 12). Выходы низкочастотного фильтра и информационные сигналы датчиков тока (блоки 5, 6, 7, 10, 11, 12) соединены с входами системы управления (блок 2). Система управления включает в себя блок системы регулирования (блок 13), входы и выходы которого соединены с блоками преобразователей координат (блоки 14, 15, 16, 17), три выхода блока преобразователя координат (блок 17) соединены с входами схем сравнения (блоки 18, 19, 20), к противоположным входам которых подключен выход генератора двухполярного пилообразного напряжения (блок 21). Выходы схем сравнения соединены через логические элементы «не» (блоки 22, 23, 24) с входами второй группы драйверов (блоки 25, 26, 27) и непосредственно с входами первой группы драйверов (блоки 28, 29, 30). Выходы первой группы драйверов (блоки 28, 29, 30) соединены с затворами верхних транзисторов стоек инвертора напряжения (блок 3), а выходы второй группы драйверов (блоки 25, 26, 27) соединены с затворами нижних транзисторов стоек инвертора напряжения (блок 3).
Система регулирования (фиг. 2) содержит две части: одна часть формирует управляющий сигнал проекции «d» для ШИМ-модулятора (блоки 31, 32, 35, 36, 38, 40, 42, 45, 47), другая часть формирует управляющий сигнал проекции «q» (33, 34, 37, 39, 41, 43, 46, 48). Система состоит из блоков 31, 32, 33, 34, выполняющих функцию алгебраического умножения, формирующих сигналы соответствующих составляющих мгновенной мощности; схем суммирования (блоки 35, 36) и схем вычитания (блоки 37, 38, 39, 40, 41); блоков интегрирования (блоки 42, 43); блока 44, вычисляющего корень из суммы квадратов двух величин; схем деления (блоки 45, 46) и регуляторов контура тока (блоки 47, 48).
Система формирования задания на скорость изменения мгновенной мощности источника питания (фиг. 3) содержит две части: одна часть формирует сигнал задания на действительную мощность источника питания (блоки 49, 21, 23, 25, 27, 29, 31, 33, 35), другая часть формирует сигнал задания на действительную мощность источника питания (20, 22, 24, 26, 28, 30, 32, 34, 36). Система состоит из блоков 49, 50, выполняющих функцию фильтров высших частот, триггеров Шмитта (блоки 51, 52), блоков 53, 54, 55, 56, выполняющих функцию алгебраического умножения, компараторов (блоки 57, 58), блоков 59, 60, выполняющих функцию вычисления абсолютного значения, блоков задания константы (блоки 61, 62, 63, 64), блоков интеграторов 65, 66.
Блоки схемы выполняют следующие функции. Блоки преобразования координат abc/dq (блок 14, 16) из соответствующих фазных токов формируют проекцию «d» II.q и проекцию «q» II.q обобщенного вектора тока инвертора, а также проекцию «d» IL.d и проекцию «q» IL.d обобщенного вектора тока нагрузки по следующим формулам:




где IIM, IIB, IIC - фазные значения токов инвертора;
ILA, ILB, ILC - фазные значения токов нагрузки;
ω - циклическая частота выходного напряжения;
t - время.
Аналогично проекция «d» UL.d.fdb и проекция «q» UL.d.fdb обобщенного вектора напряжения нагрузки с помощью блока преобразования координат abc/dq (блок 15) получаются из фазных напряжений по следующим формулам:


где Ula, Ulb. ULc - фазные значения напряжений нагрузки;
ω - циклическая частота выходного напряжения;
t - время.
Блок 13 выполняет функцию регулирования выходных параметров инвертора напряжения, сигналы управления с которого поступают на вход блока преобразования координат dq/abc (блок 17), формирующего три модулирующих сигнала согласно следующим формулам:



Компараторы (блоки 18, 19, 20) производят сравнение модулирующих сигналов с опорным двухполярным пилообразным сигналом, формируемого блоком 21. Логические элементы «не» (блоки 22, 23, 24) представляют собой импульсные (цифровые) инверторы уровня сигнала. Блоки 25, 26, 27, 28, 29, 30 являются драйверами, усиливающими сигналы по мощности, а также осуществляющие гальваническую развязку между электрическими цепями системы управления и силовой схемой инвертора напряжения (блок 3). Инвертор напряжения может быть выполнен на любых управляемых вентилях, в качестве примера полезной модели изображен инвертор напряжения на IGBT транзисторах VT1, VT2, VT3, VT4, VT5 и VT6. Выходные сигналы датчиков тока (блоки 5, 6, 7, 10, 11, 12) пропорциональны, соответственно, токам инвертора (блок 3) и нагрузки (блоки 9), и подаются на вход блоков преобразования координат 14, 16. Токи источника напряжения промышленной частоты (блок 8) являются разностью токов нагрузки (блок 9) и инвертора (блок 3). Низкочастотный фильтр (блок 4) исключает высокочастотные гармоники тока и напряжения, формируемые на выходе инвертора (блок 3).
Сигналы на выходах блоков 31, 32, 33, 34 представляют собой сигналы обратной связи по соответствующим составляющим мгновенной мощности. Блоки 35, 37 формируют результирующие сигналы обратной связи по мгновенной мощности нагрузки. Блоки 42, 43 согласно входным сигналам формируют задание на величину и скорость нарастания действительной и мнимой составляющих мгновенной мощности источника питания. Блоки 38, 39 формируют сигналы ошибок между сигналами задания соответствующих составляющих мгновенной мощности источника питания и сигналами обратных связей соответствующих составляющих мгновенной мощности нагрузки. Блок 44 производит расчет амплитуды обобщенного вектора напряжения нагрузки uL по следующей формуле:

Блоки 45, 46 формируют сигналы задания «d» и «q» проекций тока инвертора, соответственно. Блоки 40, 41 формируют сигналы ошибок между сигналами задания и сигналами обратных связей соответствующих проекций тока накопителя. Блоки 47, 48 формируют задание на «d» и «q» проекции сигнала управления инвертором напряжения, соответственно. Блок 36 формирует положительную обратную связь по «d» проекции напряжения.
Способ осуществляется следующим образом: при помощи блоков умножения 31, 32, 33, 34 сигналы обратной связи (фазные токи нагрузки и на выходе инвертора, фазные напряжения в точке общего подключения), преобразованные блоками 14, 15, 16 в «d» и «q» проекции обобщенных векторов соответствующих параметров, формируют собой активную и пульсационную составляющие действительной мгновенной мощности нагрузки и реактивную и пульсационную составляющие мнимой мгновенной мощности нагрузки, соответственно:




Блоки 35, 37 формируют сигналы обратной связи, отражающие полную действительную и мнимую мгновенную мощность нагрузки:

Блоки 42, 43, выполняющие функцию интегрирования, формируют сигнал задания на величину действительной и мнимой мгновенной мощности источника питания pG.ref, и qG.ref, соответственно, согласно следующим выражениям:


где pG0 и qG0 - величина мгновенной действительной и мнимой мощности до наброса/сброса источника питания, соответственно;
 и
и - константы, определяющие скорость нарастания мгновенной действительной и мнимой мощности источника питания после наброса/сброса нагрузки, соответственно.
- константы, определяющие скорость нарастания мгновенной действительной и мнимой мощности источника питания после наброса/сброса нагрузки, соответственно.
Знак перед константой зависит от полярности изменения мощности генератора: «+» при набросе нагрузки, «-» при сбросе.
Блоки 49, 50 выполняют функцию фильтра высших частот, определяют знак и величину перепада мощности в цепи нагрузки. Триггеры Шмитта 51, 52 фиксируют знак перепада, формируют сигнал постоянного уровня с полярностью, соответствующей полярности перепада мощности нагрузки. Блоки 59, 60 определяют абсолютное значение сигнала задания на величину соответствующих мгновенных мощностей. Блоки 61, 62 определяют минимальное значение сигнала задания на мощность накопителя. Блоки компараторов 57, 58 производят сравнение выходного сигнала блоков 59, 60 с величиной задания на минимальное значение мощности накопителя (блоки 61, 62). Блоки умножения 53, 54 умножают сигналы с выходов триггеров Шмитта с выходом компараторов 57, 58, обнуляя сигнал задания на полярность изменения мощности генератора при снижении задания на мощность накопителя ниже предельного значения. Блоки умножения 55, 56 умножают сигнал с выходов блоков умножения 53, 54 на соответствующие задания на скорость изменения составляющих мощности генератора (блоки 63, 64). Блоки интеграторов 65, 66 из постоянной величины с выходов блоков умножения 55, 56 формируют линейно изменяющиеся сигналы задания соответствующих составляющих мощности генератора с заданным направлением изменения величины.
Блоки вычитания 38, 39 формируют разность между сигналами задания и сигналами обратной связи по мгновенной мощности, формируя сигналы ошибки, которые, в свою очередь, являются заданием на «d» и «q» проекции обобщенных векторов мгновенной мощности накопителя:


На основе сформированных сигналов ошибки и сигнала с выхода блока 44, отражающего амплитуду обобщенного вектора напряжения нагрузки uL, блоки деления 45, 46 формируют задание на «d» и «q» проекции обобщенных векторов тока на выходе инвертора:


Блоки вычитания 40, 41 формируют разность между сигналами задания и сигналами обратной связи по току на выходе инвертора, формируя сигналы ошибки по «d» и «q» проекциям обобщенных векторов тока на выходе инвертора. Данные сигналы поступают на вход регуляторов тока (блоки 47 и 48), формирующих такой сигнал управления соответствующей проекции, чтобы разностный сигнал на выходе блоков 40 и 41 был равен нулю, т.е. чтобы ток на выходе инвертора равнялся сигналу задания на данный ток. Блок суммирования (блок 36) формирует положительную обратную связь по «d» проекции напряжения. Сигналы управления поступают на вход блока преобразования координат dq/abc (блок 17), формирующего три модулирующих сигнала согласно следующим формулам:



Модулирующие сигналы и опорный сигнал (с выхода блока 21) поступают на компараторы (блоки 18, 19, 20), вырабатывающие импульсы при превышении модулирующих напряжений над опорным напряжением. Сформированные импульсы поступают на вход логических элементов «не» (блоки 22, 23, 24) и драйверов (блоки 28, 29, 30) верхних транзисторов (VT1, VT3, VT5) инвертора напряжения (блок 3). Сигналы с выходов логических элементов «не» подаются на драйверы (блоки 25, 26, 27) нижних транзисторов (VT2, VT4, VT6) инвертора напряжения (блок 3). Выходные напряжения инвертора снимаются со средних точек стоек А, В, С и подаются на вход силового низкочастотного фильтра (блок 4). Низкочастотный фильтр подавляет высокочастотные гармоники, а сглаженное трехфазное напряжение подается в общую точку подключения источника питания (блок 8) и нагрузки (блок 9).
Техническим результатом является то, что предложенный способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии приводит к линейному нарастанию/спаду мощности на выходе источника питания за счет компенсации разницы мощностей накопителем электрической энергии. При одинаковой величине мощности в конце переходного процесса и его длительности максимальная динамическая нагрузка на источник питания в предлагаемом способе уменьшается относительно прототипа прямо пропорционально длительности переходного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке | 2018 |
|
RU2697262C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ТОКА ПРИ ПЕРЕХОДЕ В РЕЖИМ ПЕРЕГРУЗКИ | 2012 |
|
RU2522036C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Способ регулирования частоты в автономной энергосистеме, включающей систему накопления электрической энергии | 2022 |
|
RU2783040C1 |
| СПОСОБ И СИСТЕМА ПАРАЛЛЕЛЬНОГО УПРАВЛЕНИЯ ДЛЯ ОДНОФАЗНЫХ ИНВЕРТОРОВ И ИНВЕРТОР | 2019 |
|
RU2756177C1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| СПОСОБ УПРАВЛЕНИЯ КОНДИЦИОНЕРОМ ЭЛЕКТРОСЕТИ | 2009 |
|
RU2408122C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |



Изобретение относится к области электротехники и силовой электроники, может быть использовано при построении систем, в которых для повышения бесперебойности электроснабжения, стабилизации уровня загрузки источника, снижения потребляемой от источника реактивной мощности применяется накопитель электрической энергии на основе инвертора напряжения и аккумуляторной батареи. В предложенном способе определяют полярность и величину изменения мощности нагрузки в двух ортогональных проекциях, фиксируют полярность изменения мощности нагрузки в двух ортогональных проекциях, умножают сигнал полярности мощности нагрузки в двух ортогональных проекциях на сигнал с выхода компаратора сравнения сигнала обратной связи по соответствующей ортогональной проекции мощности инвертора напряжения и сигнала задания на минимальный уровень данной составляющей мощности инвертора, умножают на задание на величину скорости изменения мощности источника питания в двух ортогональных проекциях, формируют линейно изменяющееся задание на мощность источника питания в двух ортогональных проекциях, вычисляют величину ошибки между сигналами обратной связи и сигналами задания на мощность источника питания в двух ортогональных проекциях, формируют сигналы задания на ток в цепи нагрузки в двух ортогональных проекциях, вычисляют величину ошибки между сигналами обратной связи и сигналами задания по току в цепи нагрузки в двух ортогональных проекциях, преобразуют сигналы управления ортогональных проекций в три моделирующих сигнала во временной области, формируют опорный двухполярный сигнал, вырабатывают импульсы управления вентилями инвертора напряжения при превышении моделирующих напряжений над опорным напряжением. Предложенный способ обеспечивает линейное изменение мгновенной мощности источника питания в двух ортогональных проекциях при неизменной скорости изменения мощности нагрузки. 3 ил.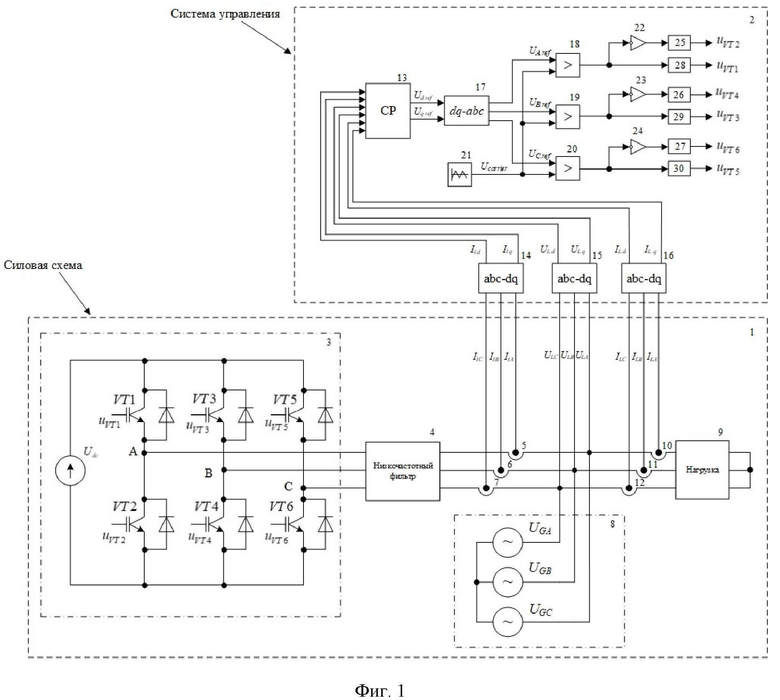
Способ управления инвертором напряжения в системах накопления электрической энергии при резкопеременной нагрузке, заключающийся в том, что вычисляют действительную и мнимую мгновенную мощность в цепи нагрузки, вычисляют величину ошибки между сигналами обратной связи и фильтрованными сигналами, производят деление сигналов ошибки на величину амплитуды обобщённого вектора напряжения нагрузки, формируют сигналы задания на ток в цепи нагрузки в двух ортогональных проекциях, вычисляют величину ошибки между сигналами обратной связи и сигналами задания по току в цепи нагрузки в двух ортогональных проекциях, преобразуют сигналы управления ортогональных проекций в три моделирующих сигнала во временной области, формируют опорный двухполярный сигнал, вырабатывают импульсы управления вентилями инвертора напряжения при превышении моделирующих напряжений над опорным напряжением, отличающийся тем, что определяют полярность и величину изменения мощности нагрузки в двух ортогональных проекциях, фиксируют полярность изменения мощности нагрузки в двух ортогональных проекциях, умножают сигнал полярности мощности нагрузки в двух ортогональных проекциях на сигнал с выхода компаратора сравнения сигнала обратной связи по соответствующей ортогональной проекции мощности инвертора напряжения и сигнала задания на минимальный уровень данной составляющей мощности инвертора, умножают на задание на величину скорости изменения мощности источника питания в двух ортогональных проекциях, формируют линейно изменяющееся задание на мощность источника питания в двух ортогональных проекциях.
| Способ управления инвертором напряжения в системах бесперебойного питания и системах накопления электрической энергии при резкопеременной нагрузке | 2018 |
|
RU2697262C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ТОКА ПРИ ПЕРЕХОДЕ В РЕЖИМ ПЕРЕГРУЗКИ | 2012 |
|
RU2522036C2 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2444833C1 |
| Барабан для бифилярной намотки проката | 1981 |
|
SU946717A1 |

