Изобретение относится к радиотехнике, точнее к радиолокации (РЛС) и может быть использовано на ж/д транспорте для мониторинга рельсового пути и полосы отчуждения при движении состава. Общей проблемой повышения безопасности на ж/д транспорте является своевременное обнаружения внештатных ситуаций, таких как застрявших на переезде автотранспорт, отставший от поезда вагон, тем более встречный поезд, поваленное дерево, животные и люди на рельсовым пути и пр.
Другой проблемой является точное определение местоположения состава на ж/д, так на скоростях 100 км/час ошибка достигает в лучшем случае 20-50 м, что явно недостаточно, особенно для высокоскоростных поездов типа «Сапсан» и других, вновь разрабатываемых еще более скоростных. Это объясняется тем, что определение характеристик движения осуществляется в основном механическими средствами, например, датчики скорости на оси колес локомотива, а местоположение локомотива по счисления (интегрированию) скорости, при этом ошибка за время следования накапливается.
Радиотехническая, особенно радиолокационная, техника на ж/д РФ находится на недостаточной стадии развития и на локомотивах почти не применяется. РЛС довольно широко применяется в основном на сортировочных станциях, так называемых «горках», для подсчета вагонов при формировании составов для определения их скорости.
Также РЛС применяется на ж/д конечных остановочных пунктах для предотвращения столкновений во время тормозного пути, о приближении к тупиковой точке, причем РЛС находится на земле, а отражатель на локомотиве или около буфера на последнем вагоне, см. http://elval.com/products/a40104.
Недостаток: ограниченное применение, только на ж/д станциях - стационарно.
Известны датчики ELV А-1 для обнаружения препятствий, предотвращение ж/д столкновения и работающие на частоте 94 ГГц, они могут эффективно использоваться в дыме, пыли, тумане или дожде, которые являются общими условиями для железных дорог, работающих над землей и под землей. Длина волны 3 миллиметра позволяет лучу радара проникать в длинный узкий дымовой туннель, и он все еще работает точно с пылью, прилипающей к передней части антенны.
Чрезвычайно узкий луч обнаружения (менее одного градуса) не отражает непреднамеренные объекты, такие как земля, рельсы, перекрестные ворота или стенки туннелей, а для определения местоположения состава (локомотива) его применение по инфраструктуре ж/д пути вообще проблематично.
Недостатки: работа только по прямой видимости, около рельсового пути влево-вправо, вверх-вниз пространство не просматривается, вообще очень ограниченная зона просмотра, по существу точечная.
Технической задачей изобретения является повышение безопасности поездов, особенно высокоскоростных.
Технический результат достигается за счет получения цифровой ж/д карты на основе тестовой РЛС по информационным ориентирам в полосе отчуждения, а во время прохождения состава определяются эти ориентиры при помощи РЛС и сравниваются с цифровой ж/д картой на предмет совпадения в реальном масштабе времени.
Конечно, есть метод составления цифровой ж/д карты, основанный на принципах геодезии так называемая теодолитная съемка, т.е измеряется расстояния и углов. Но это очень трудоемкая ручная работа и требует очень много времени, а длина железных дорог в мире очень большая.
Для решения поставленной задачи предлагается:
Основанный на использовании ориентиров в полосе отчуждения вдоль ж/д пути в качестве информационных отражающих меток, характеризующийся тем, что проводят тестовую поездку в масштабе реального времени прохождения маршрута, при этом измеряется расстояние от переднего среза локомотива до каждой метки и их азимутальные углы и по полученным значениям наносят проекцию каждой метки на продольный профиль ж/д пути с расстояниями от начала движения до каждой метки и между соединениями метками, получая таким образов цифровую ж/д карту.
Способ разделения на две части.
1ая - это построение цифровой дорожной карты (ЦДК) по определенному ориентиру путей.
2ая - это контроль прохождения маршрута.
В обеих частях применяется РЛС для определения информационных меток, в первом случае для составления центр, карт, во всех других случаях (пути следования регулярных маршрутных поездов) для сравнивания с ЦДК и определения отклонений от нее.
На фиг. 1 показана графическая схема определения расстояния и азимута до каждой метки по пути следования локомотива, на которой изображено (применительно к одной метке):
D1 - дальность до метки В, измеренная по первому приемному каналу
D2 - дальность до метки В, измеренная по второму приемному каналу
D - дальность до метки В
0 - угол пеленга метки В от линии движения локомотива (условный угол азимута)
С - проекция метки В на линию движения локомотива.
По изменению вычисленной дальности и пеленгу также вычисляется скорость локомотива и его координаты, которые сравниваются с цифровой дорожной картой и результаты сравнения и текущие координаты передаются по шине USB потребителям.
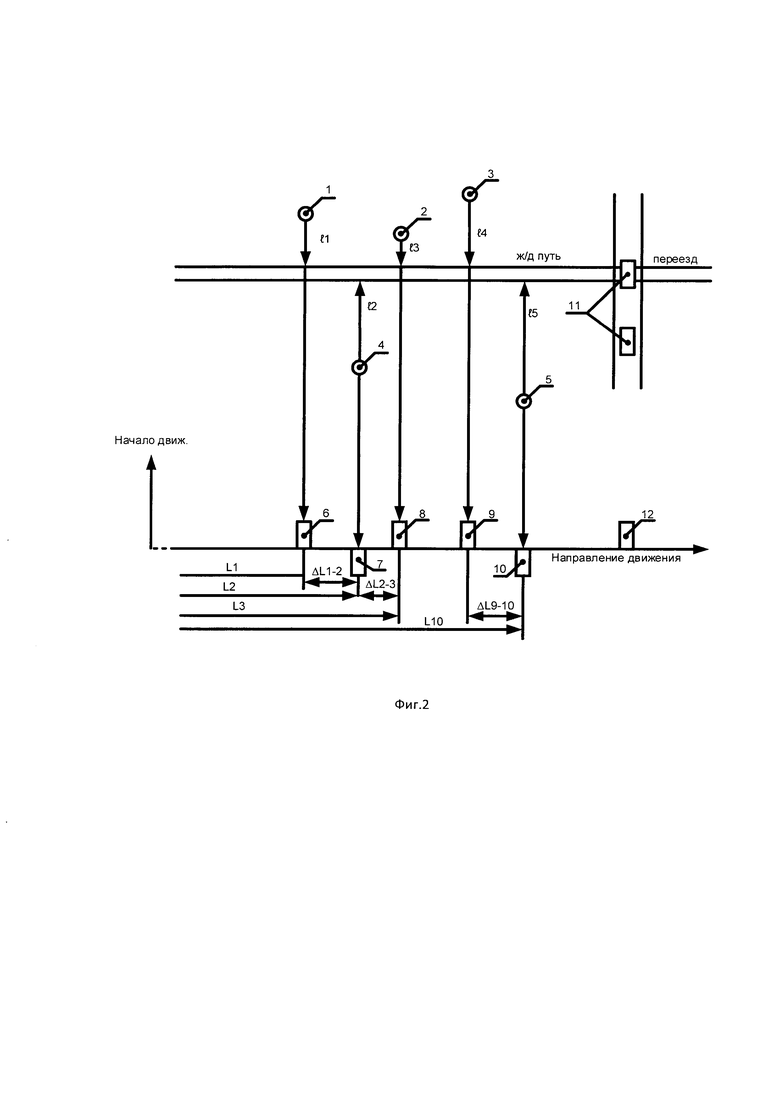
На фиг. 2 показана схема построения линейной горизонтальной координаты меток (проекций меток на горизонтальную ось): по существу цифровая дорожная карта, на которой показано:
1-5 - ориентиры (отсчеты меток) на полосе отчуждения
6, 8 и 9 - отсчеты меток на цифровой карте слева от ж/д пути
7 и 10 - отсчеты меток на цифровой карте справа от ж/д пути
11 - застрявший на ж/д переезде автотранспорт или около него
12 - метка, которой нет на цифровой карте
L1-L10 - расстояния от начала движения
ΔL - расстояния между соседними метками
L1-L5 - расстояния D от РЛС до каждой метки
Заметим, что для составления цифровой ж/д карты в тестовом режиме и для мониторинга прирельсовой обстановки применяется один и тот же алгоритм измерения и один и тот тип РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА | 2018 |
|
RU2684965C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2021 |
|
RU2778364C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ЛОКОМОТИВА И НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2021 |
|
RU2769956C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2018 |
|
RU2726287C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ЛОКОМОТИВА ПО ТЕХНОЛОГИИ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ | 2024 |
|
RU2822345C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |

Изобретение относится к области радиотехники. Технический результат заключается в повышении безопасности движения поездов. Такой результат достигается за счет получения цифровой ж/д карты на основе тестовой РЛС по информационным ориентирам в полосе отчуждения, а во время прохождения состава определяются эти ориентиры при помощи РЛС и сравниваются с цифровой ж/д картой на предмет совпадения в реальном масштабе времени. 1 з.п. ф-лы, 2 ил.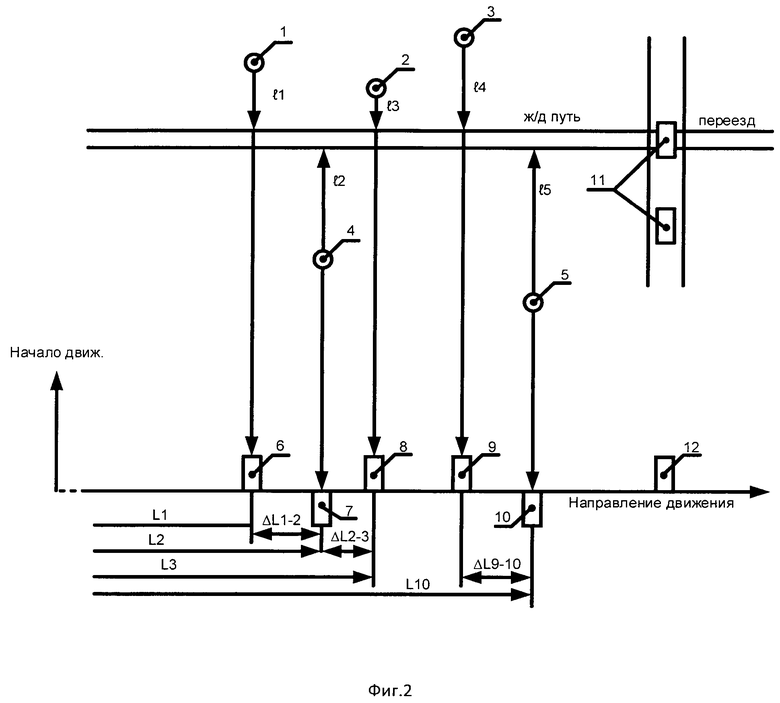
1. Способ составления цифровой ж/д карты для мониторинга движения локомотива, основанный на использовании ориентиров в полосе отчуждения вдоль ж/д пути в качестве информационных отражающих меток, характеризующийся тем, что проводят тестовую поездку в масштабе реального времени прохождения маршрута, при этом измеряется расстояние от переднего среза локомотива до каждой метки и их азимутальные углы и по полученным значениям наносят проекцию каждой метки на продольный профиль ж/д пути с расстояниями от начала движения до каждой метки и между соединениями метками, получая таким образом цифровую ж/д карту, при этом для обнаружения меток применяется РЛС на основе MIMO системы, расположенная в передней части локомотива и содержащая передающий зондирующий канал и два приемных отраженных канала со следующей последовательностью действий: отраженные сигналы по приемным каналам обрабатываются по алгоритму решения прямой геодезической задачи, причем дальности от метки до приемных антенн определяются выражениями
 - дальность до первой приемной антенны;
- дальность до первой приемной антенны;
 - дальность до второй приемной антенны;
- дальность до второй приемной антенны;
 - время от начала посылки зондирующего сигнала до прихода отраженного сигнала,
- время от начала посылки зондирующего сигнала до прихода отраженного сигнала,
с - скорость света,
пеленг метки  определяется выражением:
определяется выражением:
где d - расстояния между антеннами приемных каналов, зная пеленг  и расстояния D1, D2, истинное расстояние до метки определяется выражениями:
и расстояния D1, D2, истинное расстояние до метки определяется выражениями:
или
проекция каждой метки на горизонтальную ось цифровой карты равна
2. Способ по п. 1, характеризующийся тем, что получаемые данные во время штатной поездки непрерывно сравниваются с цифровой ж/д картой пути следования локомотива в реальной масштабе времени и по этому сравнению выявляют лишние ориентиры, отсутствующие на цифровой карте, как помехи.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

