Изобретение относится к радиотехнике, точнее к радиолокации (РЛС) и может быть использовано на ж/д транспорте для точного измерения местоположения (координаты) головного вагона состава - локомотива.
Общей проблемой определения местоположения состава на ж/д является его большая погрешность, так на скоростях до 100 км/час она достигает в лучшем случае 20-50 м, что явно недостаточно, особенно для высокоскоростных поездов типа «Сапсан» и других, вновь разрабатываемых еще более скоростных. Это объясняется тем, что определение характеристик движения осуществляется в основном механическими средствами, например, датчики скорости на оси колес локомотива, а местоположение локомотива по счислению (интегрированию) скорости, при этом ошибка за время следования накапливается.
Радиотехническая, особенно радиолокационная, техника на ж/д РФ находится на недостаточной стадии развития и на локомотивах почти не применяется. РЛС довольно широко применяется в основном на сортировочных станциях, так называемых «горках», для подсчета вагонов при формировании составов для определения их скорости.
Также РЛС применяется на ж/д конечных остановочных пунктах для предотвращения столкновений во время тормозного пути, о приближении к тупиковой точке, причем РЛС находится на земле, а отражатель на локомотиве или около буфера на последнем вагоне, см. http://elval.com/products/a40104.
Недостаток: ограниченное применение, только на ж/д станциях - стационарно.
Известны датчики ELVA-1 для обнаружения препятствий, предотвращающие ж/д столкновения и работающие на частоте 94 ГГц, они могут эффективно использоваться в дыме, пыли, тумане или дожде, которые являются общими условиями для железных дорог, работающих над землей и под землей. Длина волны 3 миллиметра позволяет лучу радара проникать в длинный узкий дымовой туннель, и он все еще работает точно с пылью, прилипающей к передней части антенны.
Чрезвычайно узкий луч обнаружения (менее 1 градуса) не отражает непреднамеренные объекты, такие как земля, рельсы, перекрестные ворота или стенки туннелей, а для определения местоположения состава (локомотива) его применение по инфраструктуре ж/д пути вообще проблематично.
Недостатки: работа только по прямой видимости, около рельсового пути влево-вправо, вверх-вниз пространство не просматривается, вообще очень ограниченная зона просмотра, по существу точечная.
Технической задачей изобретения является повышение точности определения местоположения локомотива поезда по инфраструктуре ж/д пути, особенно для высокоскоростных поездов.
Технический результат достигается за счет применения РЛС с ЛЧМ и широкой ДН, устанавливаемой на кабине машиниста, которая определяет ориентиры ж/д пути такие, как трансформаторные будки, ж/д переезды, стрелки, светофоры, опоры контактной сети и пр., вычисляет дальность до них и углы азимута и сверяет с цифровой дорожной картой.
Для решения поставленной задачи предлагается способ определения местоположения поезда по инфраструктуре железнодорожного пути в режиме реального времени, основанный на использовании ориентиров вдоль ж/д пути в качестве информационных отражающих меток, характеризующийся тем, что для их обнаружения применяется РЛС на основе MIMO системы, расположенная в передней части локомотива, и содержащая передающий зондирующий канал и два приемных отраженных канала со следующей последовательностью действий: отраженные сигналы по приемным каналам обрабатываются по алгоритму решения прямой геодезической задачи.
Система решается с двух позиций: как это решается в целом и как конкретно с точки зрения геодезии:
- измерение расстояния;
- измерение углов;
- определение местонахождения заданной точки.
Эта геодезическая задача может быть решена радиотехническим способом, а именно с точки зрения радиолокации. Это фазовый или амплитудный или фазово-амплитудный дальномер для определения дальности до цели и ее пеленг.
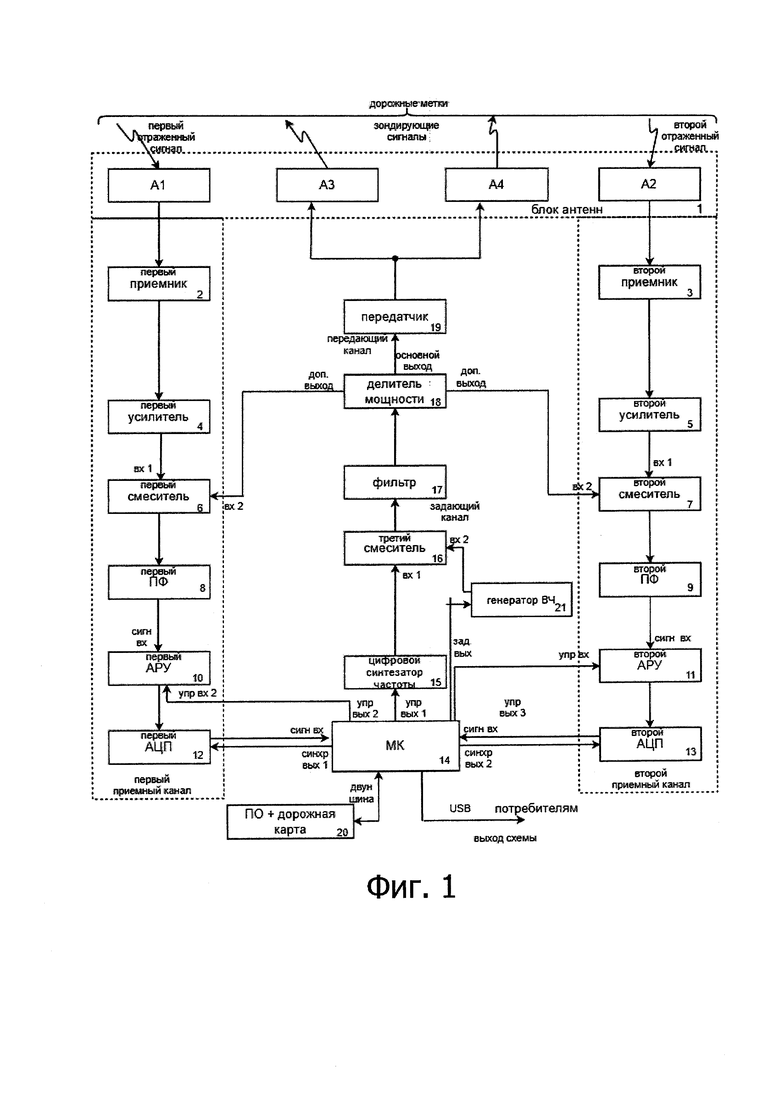
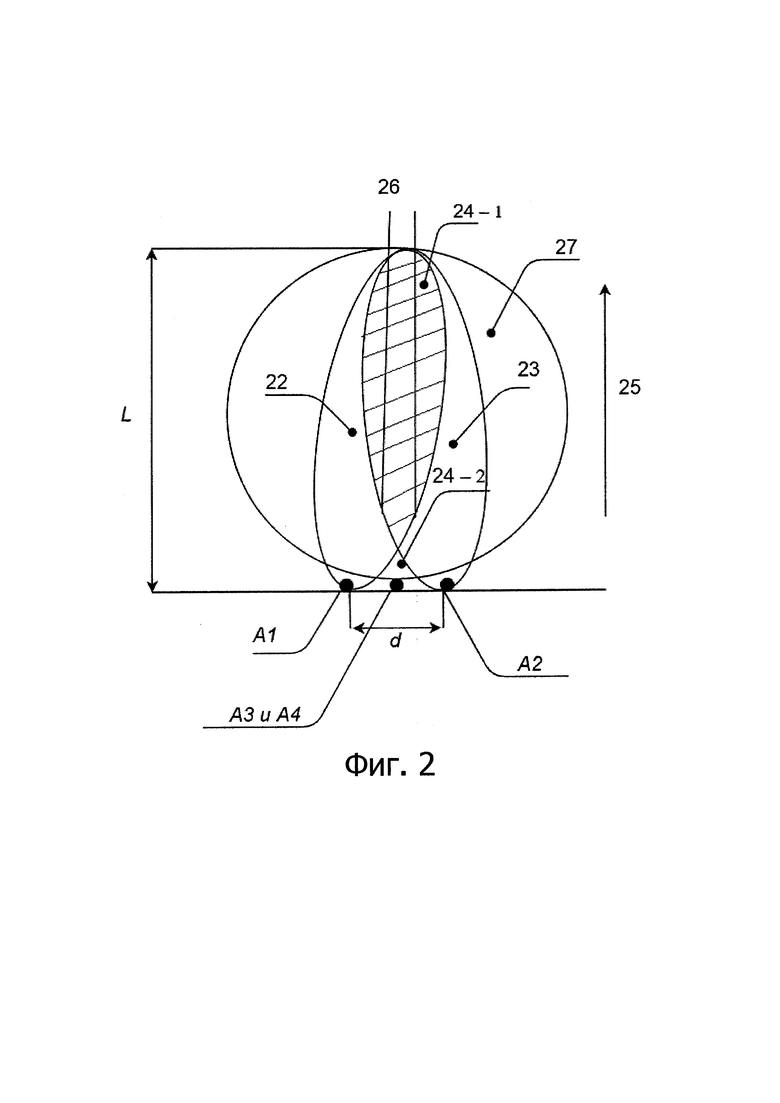
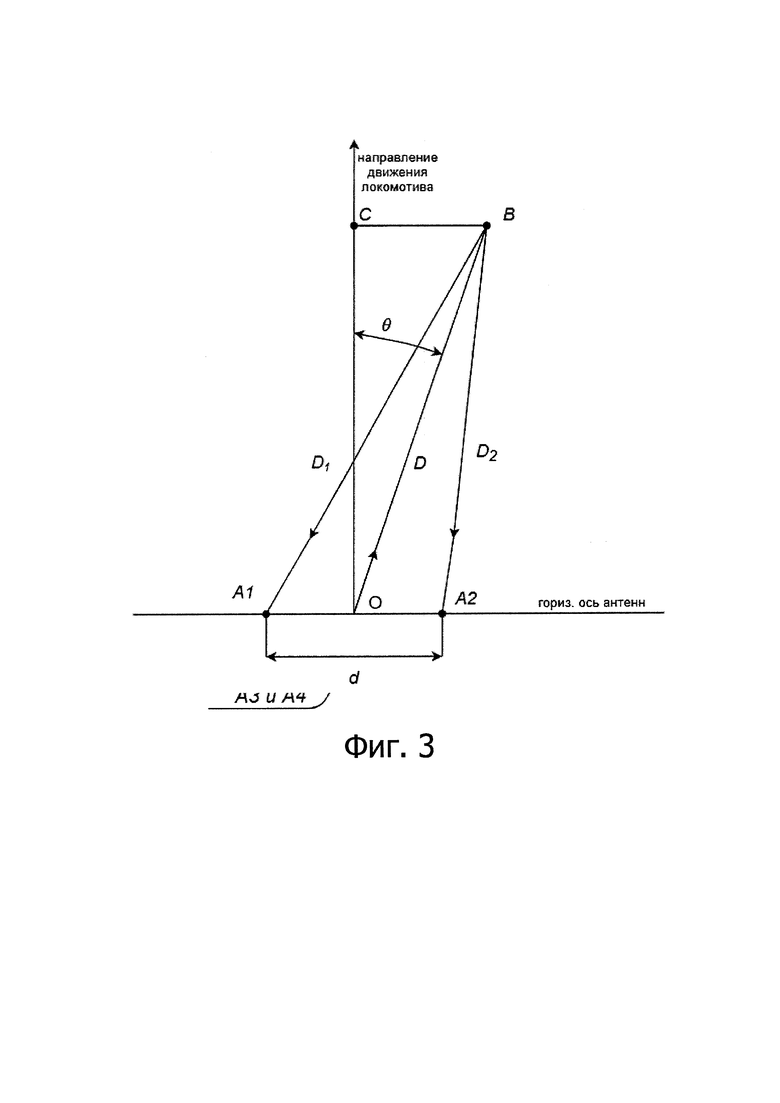
На фиг. 1 показана структурная электрическая схема для практического решения предлагаемого способа, на фиг. 2 - диаграммы направленности передающей и приемных частей способа, на фиг. 3 - пример хода лучей этих частей, на которых показано:
На фиг. 1
1 - антенный блок
2 и 3 - первый и второй приемники соответственно
4 и 5 - первый и второй усилители соответственно
6 и 7 - первый и второй смесители соответственно
8 и 9 - первый и второй полосовые фильтры соответственно
10 и 11 - первый и второй АРУ соответственно
12 и 13 - первый и второй АЦП соответственно
14 - микроконтроллер (МК)
15 - цифровой синтезатор
16 - третий смеситель
17 - третий полосовой фильтр
18 - делитель мощности
19 - передатчик
20 - программное обеспечение (ПО) + цифровая дорожная карта
21 - генератор несущей частоты
На фиг. 2
22 - диаграмма направленности (ДН) первой приемной антенны А1
23 - ДН второй приемной антенны А2
24 - 1 - результирующая ДН антенн А1 и А2
24 - 2 - мертвая зона пеленгования
25 - направление движения
26 - рельсовый путь
27 - передающая ДН
d - расстояние между приемными антеннами А1 и А2
L - максимальная дальность обзора зондирующего пространства (≈1 км)
На фиг. 3
точка В - ориентир - метка вдоль ж/д пути
линия О-В - линия биссектрисы треугольника
А1 - В - А2 - треугольник измерения координаты метки В
D1 - дальность до точки В, измеряемая первым приемным каналом
D2 - дальность до точки В, измеряемая вторым приемным каналом
D - истинная дальность до метки (вычисленная)
θ - угол азимута, измеряемый схемой
Схема на фиг. 1 имеет следующие крупные модули: антенный блок, передающий канал и два идентичных приемных канала, которыми управляет МК 14, первый управляющий выход которого через цифровой синтезатор 15 соединен с первым входом третьего смесителя 16, со вторым выходом которого соединен выход СВЧ-генератора 21, выход смесителя 16 через полосовой фильтр 17 соединен с делителем мощности 18, основной выход его через передатчик 19 соединен параллельно с передающими антеннами A3 и А4, которые зондирующими сигналами направлены в контролируемое пространство вдоль ж/д пути впереди локомотива.
Отраженные сигналы от ориентиров-меток вдоль ж/д пути через антенный блок 1 (антенны А1 и А2) соединены с приемниками 2 и 3 первого и второго каналов соответственно, выходы которых через второй и третий усилители соединены с первыми входами первого и второго усилителей 4 и 5 также соответственно; выходы их соединены с первыми входами первого и второго смесителей 6 и 7, с вторыми входами которых соединены дополнительные выходы делителя мощности 18, выходы смесителей через первый и второй полосовой фильтры 8 и 9 соединены с сигнальными входами первого и второго АРУ 10 и 11 соответственно, с управляющими входами этих АРУ соединены выходы 2 и 3 МК 14 также соответственно; выходы этих АРУ через первый и второй АЦП 12 и 13 соединены с сигнальными входами МК 14, который выходами синхронизации соединен с соответствующими входами обоих АЦП, МК 14 двунаправленной шиной соединен с ПО и цифровой дорожной картой 20, а выход шиной USB МК 14 является выходом системы.
Схема на фиг. 2 имеет следующие соединения. Передающие антенны A3 и А4 соединены зондирующими сигналами с окружающим пространством широкой ДН 27, отраженные от ориентира - метки 24 с более узкими ДН 22 и 23 соединены с приемными антеннами А1 и А2, образуя вдоль ж/д колеи 25 совместное контролируемое пространство 24, а расстояние d между приемными антеннами А1 и А2 образует измерительную базу, направление движения локомотива показано поз. 25.
Схема на фиг. 3 имеет следующие обозначения.
d - расстояние (база) между двумя приемными антеннами А1 и А2.
D1 - дальность до метки В, измеренная по первому приемному каналу
D2 - дальность до метки В, измеренная по второму приемному каналу
D - вычисленная дальность до метки В
θ - угол пеленга метки В от линии движения локомотива (условный угол азимута)
С - проекция точки В на линию движения локомотива
Схема на фиг. 1 построена по классическому принципу определения координат локомотива по однобазовой схеме с линейно-частотной модуляцией (ЛЧМ), которая основана на определении направления прихода отраженных от объекта радиоволн, измерения расстояния до него путем сравнения частот зондирующего и отраженных сигналов в точках приема антенной системы 1. Передающий канал по сигналам МК 14 формирует ЛЧМ на схемах 15, 21 и 16, отфильтровывает его на схеме 17, усиливает по мощности на схеме 18 и через передатчик 18 и антенны A3 и А4 излучают электромагнитные волны по ходу локомотива. Отраженный от метки сигнал принимается на две антенны А1 и А2, разнесенные на расстояние (базу) = d, при этом частоты будут приниматься с задержкой, пропорциональной дальности до пеленгуемой метки.
Принятые сигналы усиливаются на усилителях 4 и 5, поступают на смесители 6 и 7, где смешиваются с сигналом (уменьшенным) усилителя мощности 18, после чего отфильтровываются на полосовых фильтрах 8 и 9, затем нормируются на АРУ 10 и 11 и поступают на АЦП 12 и 13, а с них на МК 14, где по простейшим формулам определяется дальность до метки, а по разностям этих дальностей и базовому расстоянию определяется пеленг метки.
По изменению вычисленной дальности и пеленгу также вычисляется скорость локомотива и его координаты, которые сравниваются с цифровой дорожной картой и результаты сравнения и текущие координаты передаются по шине USB потребителям.
Формирование зондирующих сигналов и обработка отраженных сигналов и вычисление пеленга проводится по укрупненному алгоритму, см. фиг. 3.
Известны базовая величина d, вычисленные дальности до метки D1, D2 и D, по ним вычисляются углы треугольника А1-В-А2, назовем их α, β, γ.
Тогда
γ=180°-(D1-D2)
Отсюда пеленг угла θ равен [90° - угол ВОА2]
Далее также сравнение с цифровой дорожной картой и т.д.
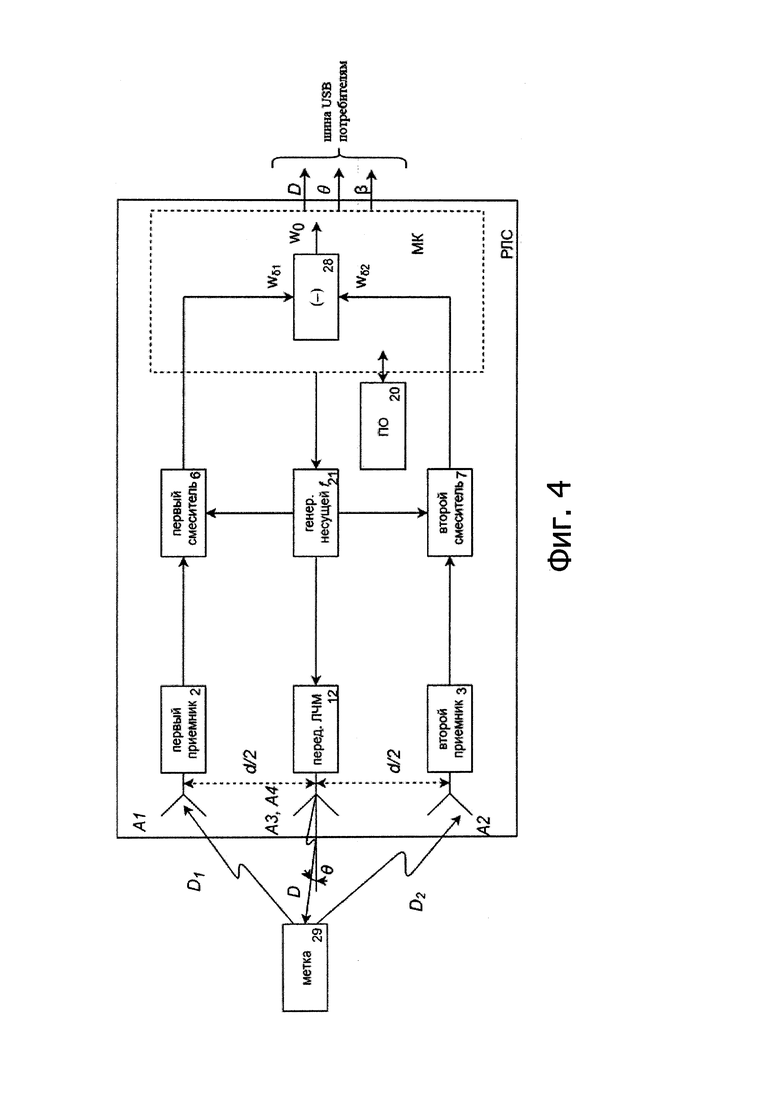
На фиг. 4 показана укрупненная электрическая схема однобазового способа, на фиг. 5 временные диаграммы его работы, на которых дополнительно изображено:
2 - первый приемник
3 - второй приемник
12 - передатчик ЛЧМ
14 - МК
21 - генератор ВЧ (несущей частоты)
28 - схема вычитания внутри МК
29 - метка
D1 - расстояние от метки до первого приемника
D2 - расстояние от метки до второго приемника
D - расстояние от передающих антенн до метки В (истинное расстояние)
θ - угол азимута
β - угол места
А1 - первая приемная антенна
А2 - вторая приемная антенна
A3, А4 - передающие антенны
wб1, wб2 - частоты биений
Схема по фиг. 4 работает следующим образом.
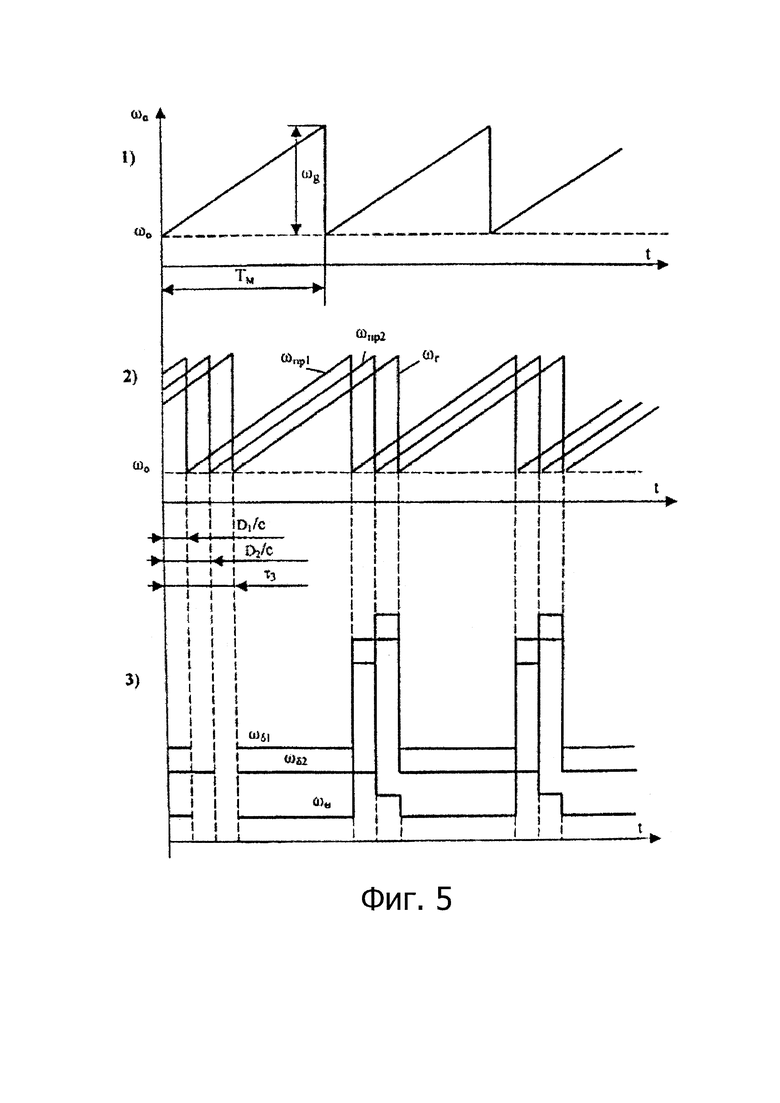
Передатчик 12 излучает ЛЧМ сигналы с несущей частотой wп, определяемой выражением  (см. фиг. 4)
(см. фиг. 4)
где w0 - начальная частота
wθ - конечная частота
Tg - период ЛЧМ
t - текущее время,
этот сигнал отражается от метки и принимается на две антенны А1 и А2, разнесенные на расстояние (базу) A1-А2=d с задержкой, пропорциональной удвоенной дальности до метки. При этом частоты wпр1, wпр2 принятых первым и вторым приемными каналами будут изменяться по закону диаграммы 2 (см. фиг. 5), описываемому выражениями
Принятые сигналы после их усиления приемниками 2 и 3 поступают на первый и второй смесители 6 и 7 соответственно, где смешиваются с сигналами генератора несущей частоты 21. Частоты биений на выходах смесителей 6 и 7 определяются выражениями:
На выходе схемы выделения разностной частоты 28 формируется сигнал с частотой wθ, соответствующей пеленгу θ цели (угол азимута)

В то же время как видно из фиг. 3
учитывая, что D»d это уравнение можно переписать в виде:
Из него можно получить выражение пеленга цели

Подставляя выражение (4) в (5) получим

где  - фиксированный коэффициент, определяемый параметрами частотной модуляции Tg, wg передатчика и базой d антенн.
- фиксированный коэффициент, определяемый параметрами частотной модуляции Tg, wg передатчика и базой d антенн.
Таким образом, измерив частоту биений сигналов, принятых на разнесенные антенны, можно определить дальность до метки и угол азимута, а решение выражения (6) это просто табличное определение угла из таблицы arcsin-ов, записанных в программном обеспечении (ПО).
В первых двух вариантах могут быть использованы РЛС с любыми зондирующими сигналами: непрерывными, импульсными и пр., а в третьем варианте только ЛЧМ. Этот вариант наиболее точный и помехоустойчивый, его элементная база может быть выбрана на СБИС фирмы AD (analog devices) или на отечественных заказных СБИС г. Зеленограда или фирмы «Интеграл» г. Минск.
В качестве приемо-передающих антенн подходят элементарные изотропные излучатели, причем имеющие вертикальную и горизонтальную поляризацию для определения меток как в вертикальной, так и в горизонтальной плоскости.
Наличие двух излучающих антенн позволяет при минимальных аппаратурных затратах (габаритно-массовых характеристиках - ГМХ) повысить энергетику системы в целом, т.е. увеличить ее разрешающую способность определения координатной цели, в данном случае координаты меток.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| СПОСОБ СОСТАВЛЕНИЯ ЦИФРОВОЙ Ж/Д КАРТЫ И ПРИМЕНЕНИЕ ЕЁ ДЛЯ МОНИТОРИНГА ДВИЖЕНИЯ ЛОКОМОТИВА | 2020 |
|
RU2769100C2 |
| НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА | 2018 |
|
RU2684965C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2021 |
|
RU2778364C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2828006C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ЛОКОМОТИВА И НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2021 |
|
RU2769956C1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 2019 |
|
RU2726289C1 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО БЕСКОНТАКТНОГО КОНТРОЛЯ БЕТОННЫХ И ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2022 |
|
RU2801787C1 |
Изобретение относится к определению местоположения поезда. Технический результат - повышение точности определения местоположения локомотива поезда по инфраструктуре железнодорожного пути, особенно для высокоскоростных поездов. Он достигается за счет применения РЛС с линейно-частотной модуляцией, устанавливаемой на кабине машиниста, которая определяет ориентиры ж/д пути такие, как трансформаторные будки, ж/д переезды, стрелки, светофоры, опоры контактной сети и пр., вычисляет дальность до них и углы азимута и сверяет их с цифровой дорожной картой. Способ основан на использовании ориентиров вдоль всего ж/д пути, в качестве информационных отражающих меток, характеризующихся тем, что для их обнаружения применяется РЛС на основе MIMO системы, расположенной в передней части локомотива и содержащей передающий зондирующий канал и два приемных отраженных канала со следующей последовательностью действий: отраженные сигналы по приемным каналам обрабатываются по алгоритму решения прямой геодезической задачи. 2 з.п. ф-лы, 5 ил.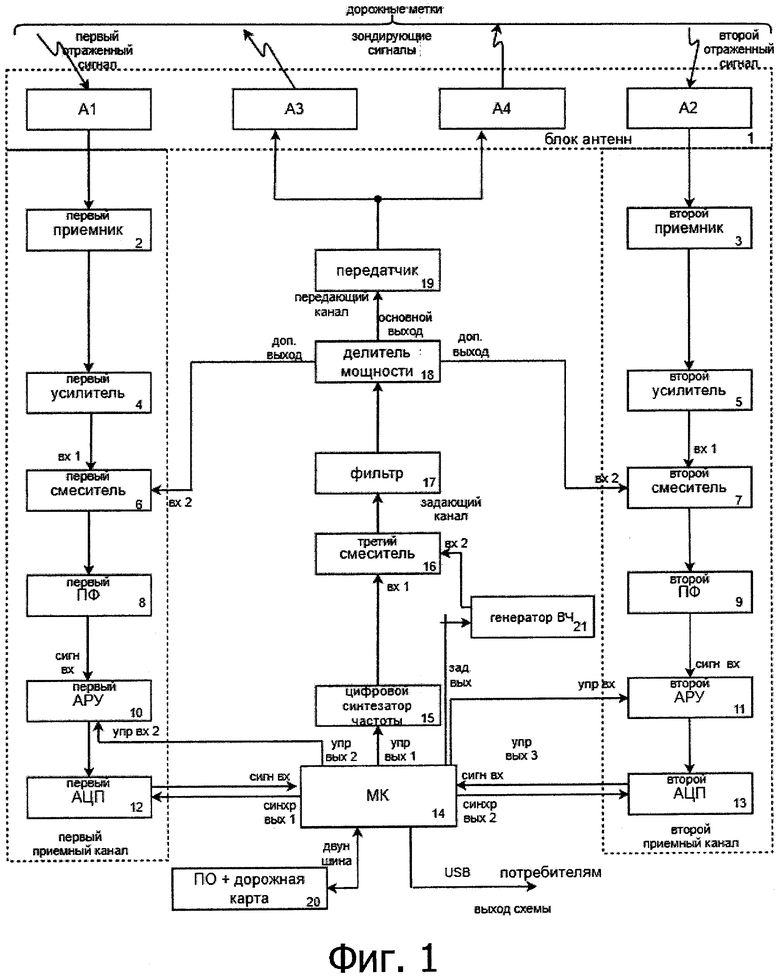
1. Способ определения местоположения поезда по инфраструктуре железнодорожного пути в режиме реального времени, основанный на использовании ориентиров вдоль ж/д пути в качестве информационных отражающих меток, характеризующийся тем, что для их обнаружения применяется РЛС на основе MIMO системы, расположенная в передней части локомотива и содержащая передающий зондирующий канал и два приемных отраженных канала со следующей последовательностью действий: передающий канал по сигналам микроконтроллера (МК) 14 формирует линейно-частотную модуляцию (ЛЧМ) на схемах цифрового синтезатора частоты 15, генератора несущей частоты 21, передающих сигнал на смеситель 16, отфильтровывает его на схеме фильтра 17, усиливает по мощности на схеме делителя мощности 18 и через передатчик 19 и антенны A3 и А4 излучаются электромагнитные волны по ходу локомотива, при этом, отраженный от метки сигнал принимается на две антенны А1 и А2, разнесенные на расстояние d, при этом частоты будут приниматься с задержкой, пропорциональной дальности до пеленгуемой метки, затем принятые сигналы усиливаются на усилителях 4 и 5, поступают на смесители 6 и 7, где смешиваются с сигналом (уменьшенным) делителя мощности 18, после чего отфильтровываются на полосовых фильтрах 8 и 9, затем нормируются и поступают на АЦП 12 и 13, а с них на МК 14, где определяется дальность до метки, а по разностям этих дальностей и базовому расстоянию определяется пеленг метки, причем дальности от метки до приемных антенн определяются выражениями:
D1=c×t1/2 - дальность до первой приемной антенны;
D2=c×t2/2 - дальность до второй приемной антенны;
где t1,2 - время от начала посылки зондирующего сигнала до прихода отраженного сигнала;
с - скорость света,
пеленг метки θ определяется выражением
θ=arcsin((D1-D2)/d),
где d - расстояние между антеннами приемных каналов,
зная пеленг θ и расстояния D1, D2, истинное расстояние до метки определяется выражением:
D=D1 - 0,5d×sinθ
или
D=D2 + 0,5d×sinθ,
полученные данные сравниваются с цифровой дорожной электронной картой пути следования локомотива в реальном масштабе времени и по этому сравнению определяется скорость локомотива и пройденный путь от начала движения и его координаты.
2. Способ по п. 1, характеризующийся тем, что цифровая электронная карта маршрута следования составляется заранее по прохождению тестовой поездки с указанием времени движения.
3. Способ по п. 1, характеризующийся тем, что зондирующие сигналы имеют вертикальную и горизонтальную поляризацию, а приемные каналы принимают отраженные от метки сигналы также с учетом их поляризации.
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| WO 2016117192 A1, 28.07.2016 | |||
| WO 1994026571 A1, 24.11.1994. | |||

