ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к системам управления полетом, а в частности, к системе управления полетом для управления горизонтальным стабилизатором летательного аппарата.
[002] По меньшей мере некоторые известные системы управления полетом включают в себя электронную схему управления приводом (actuator control electronics, АСЕ), которая собирает входные сигналы от датчиков и данные от другого различного авиационного электронного оборудования для определения того, как выдавать команду на данную поверхность управления полетом. Электронная схема управления приводом в общем случае включает в себя процессорное устройство, которое непосредственно реагирует на вводимые пилотом сигналы, на входные сигналы от датчиков или на данные, принимаемые от другого компьютера управления полетом, с выработкой управляющего сигнала для управления поверхностью управления полетом. Управляющий сигнал в общем случае выдает команду управления направлением и скоростью поворота или приведением в действие и принимается блоком дистанционного электронного оборудования (remote electronics unit, REU), который фактически управляет приводом, например гидравлическим приводом или электрическим приводом. Блок дистанционного электронного оборудования выполняет задаваемые командой поворот или приведение в действие в течение периода времени или до тех пор, пока не будет принята новая команда. В альтернативных вариантах реализации управляющий сигнал выдает команду управления положением, и блок дистанционного электронного оборудования сохраняет поверхность управления полетом в этом положении с использованием системы управления положением с замкнутым контуром.
[003] В некоторых известных системах управления полетом используются избыточные электронные схемы управления приводом для независимого определения и согласования порядка выдачи команд на управление конкретной поверхностью управления полетом. Например, горизонтальный стабилизатор, который обеспечивает управление тангажом летательного аппарата, имеет высокий уровень максимальных углов отклонения по отношению к летательному аппарату, и поэтому к командам управления горизонтальным стабилизатором часто предъявляются требования избыточности для обеспечения надлежащего управления поверхностью управления полетом во время нормальной работы, а также в состояниях отказа. Состояния отказа включают в себя, например, отказ электронной схемы управления приводом или блока дистанционного электронного оборудования. Во время такого отказа система управления полетом должна сохранять управление поверхностью управления полетом, например горизонтальным стабилизатором. Соответственно, многие известные системы управления полетом включают в себя избыточные сигнальные тракты управления полетом, которые могут сохранять управление во время отказа электронной схемы управления приводом, блока дистанционного электронного оборудования, модуля управления стабилизатором (stabilizer control module, STCM) или любого другого компонента системы управления полетом. Такие системы управления полетом обычно включают в себя избыточные электронные схемы управления приводом, блок дистанционного электронного оборудования и модуль управления стабилизатором.
[004] В отличие от этого, например, по меньшей мере некоторые летательные аппараты имеют множество рулей высоты, т.е. левый руль высоты и правый руль высоты. Один руль высоты может иметь множество приводов, каждый из которых имеет электронную схему управления приводом и блок дистанционного электронного оборудования. Учитывая, что полномочия по управлению углами отклонения рулей высоты разделены между многочисленными поверхностями управления полетом и потенциально - множеством приводов, нет необходимости в том, чтобы блок дистанционного электронного оборудования в общем случае использовал множество электронных схем управления приводом для выдачи команд.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] Согласно одному аспекту раскрытия настоящего изобретения обеспечена система управления полетом для поверхности управления полетом. Система управления полетом включает в себя первую электронную схему управления приводом, вторую электронную схему управления приводом, третью электронную схему управления приводом, первый блок дистанционного электронного оборудования и второй блок дистанционного электронного оборудования. Первая электронная схема управления приводом выполнена с возможностью выработки первого управляющего сигнала для поверхности управления полетом. Вторая электронная схема управления приводом выполнена с возможностью выработки второго управляющего сигнала для поверхности управления полетом. Третья электронная схема управления приводом выполнена с возможностью выработки третьего управляющего сигнала для поверхности управления полетом. Первый блок дистанционного электронного оборудования соединен с первой электронной схемой управления приводом и второй электронной схемой управления приводом и выполнен с возможностью управления работой привода, соединенного с поверхностью управления полетом, на основании первого управляющего сигнала и второго управляющего сигнала. Второй блок дистанционного электронного оборудования соединен со второй электронной схемой управления приводом и третьей электронной схемой управления приводом и выполнен с возможностью управления работой привода на основании второго управляющего сигнала и третьего управляющего сигнала.
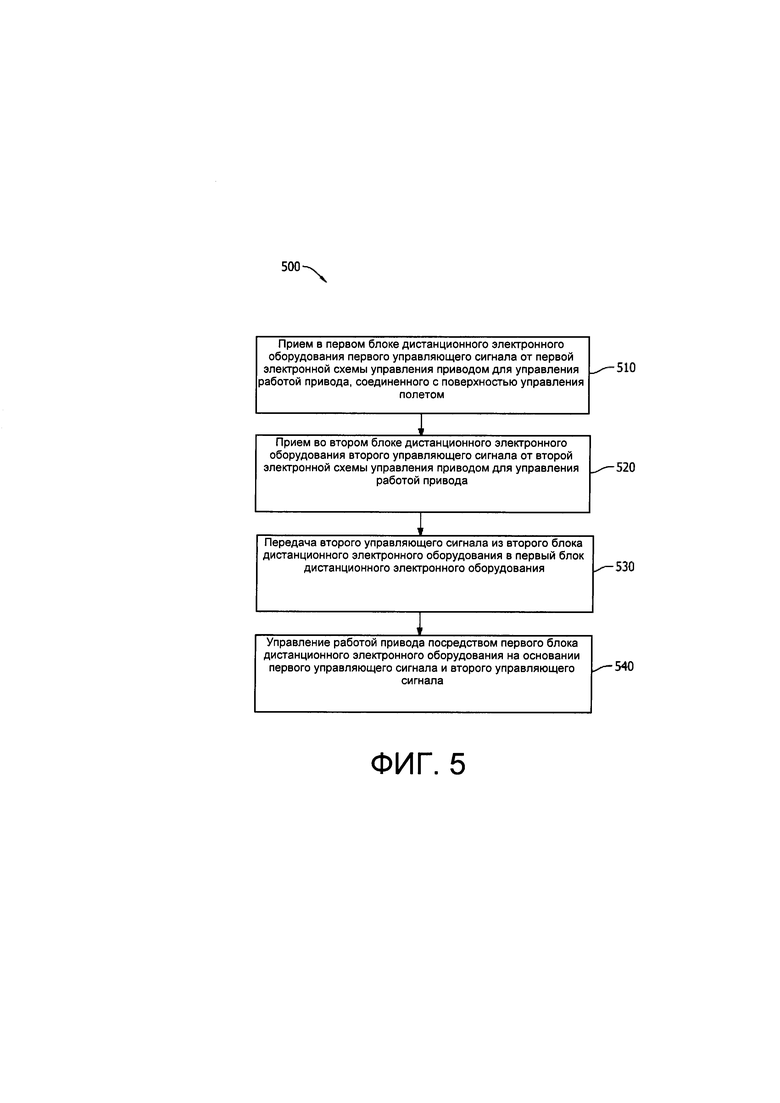
[006] Согласно еще одному аспекту раскрытия настоящего изобретения обеспечен способ использования системы управления полетом для управления работой поверхности управления полетом. Способ включает прием в первом блоке дистанционного электронного оборудования первого управляющего сигнала от первой электронной схемы управления приводом для управления работой привода, соединенного с поверхностью управления полетом. Способ включает прием во втором блоке дистанционного электронного оборудования второго управляющего сигнала от второй электронной схемы управления приводом для управления работой привода. Способ включает передачу второго управляющего сигнала из второго блока дистанционного электронного оборудования в первый блок дистанционного электронного оборудования. Способ включает управление работой привода посредством первого блока дистанционного электронного оборудования на основании первого управляющего сигнала и второго управляющего сигнала.
[007] Согласно еще одному аспекту раскрытия настоящего изобретения обеспечена система управления полетом для горизонтального стабилизатора. Система управления полетом включает в себя привод, соединенный с горизонтальным стабилизатором, первый блок дистанционного электронного оборудования и второй блок дистанционного электронного оборудования. Первый блок дистанционного электронного оборудования соединен с приводом и выполнен с возможностью управления работой привода на основании соответствующих управляющих сигналов, поступающих по меньшей мере от двух электронных схем управления приводом. Второй блок дистанционного электронного оборудования соединен с приводом и выполнен с возможностью управления работой привода независимо от первого блока дистанционного электронного оборудования на основании соответствующих управляющих сигналов, поступающих по меньшей мере от двух электронных схем управления приводом, при этом второй блок дистанционного электронного оборудования также соединен с первым блоком дистанционного электронного оборудования, а также выполнен с возможностью передачи управляющего сигнала, принятого от электронной схемы управления приводом, в первый блок дистанционного электронного оборудования.
[008]] Раскрытые признаки, функции и преимущества могут быть реализованы независимо в различных вариантах реализации или могут быть скомбинированы в других вариантах реализации, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] На ФИГ. 1 показана примерная функциональная схема системы управления полетом для горизонтального стабилизатора;
[0010] на ФИГ. 2 показана примерная схема системы управления полетом для горизонтального стабилизатора;
[0011] на ФИГ. 3 показана еще одна схема системы управления полетом, показанной на ФИГ. 2;
[0012] на ФИГ. 4 показана еще одна схема системы управления полетом, показанной на ФИГ. 2-3; и
[0013] на ФИГ. 5 представлена блок-схема способа управления работой системы управления полетом для управления поверхностью управления полетом.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0014] При использовании в настоящем документе элемент или этап, указанный в единственном числе и сопровождаемый грамматическими показателями единственного числа, следует понимать как не исключающий множество элементов или этапов, если это исключение явно не указано. Кроме того, ссылки на "один вариант реализации" настоящего изобретения или "примерный вариант реализации" не предназначены для интерпретации как исключения существования дополнительных вариантов реализации, которые также включают в себя перечисленные признаки.
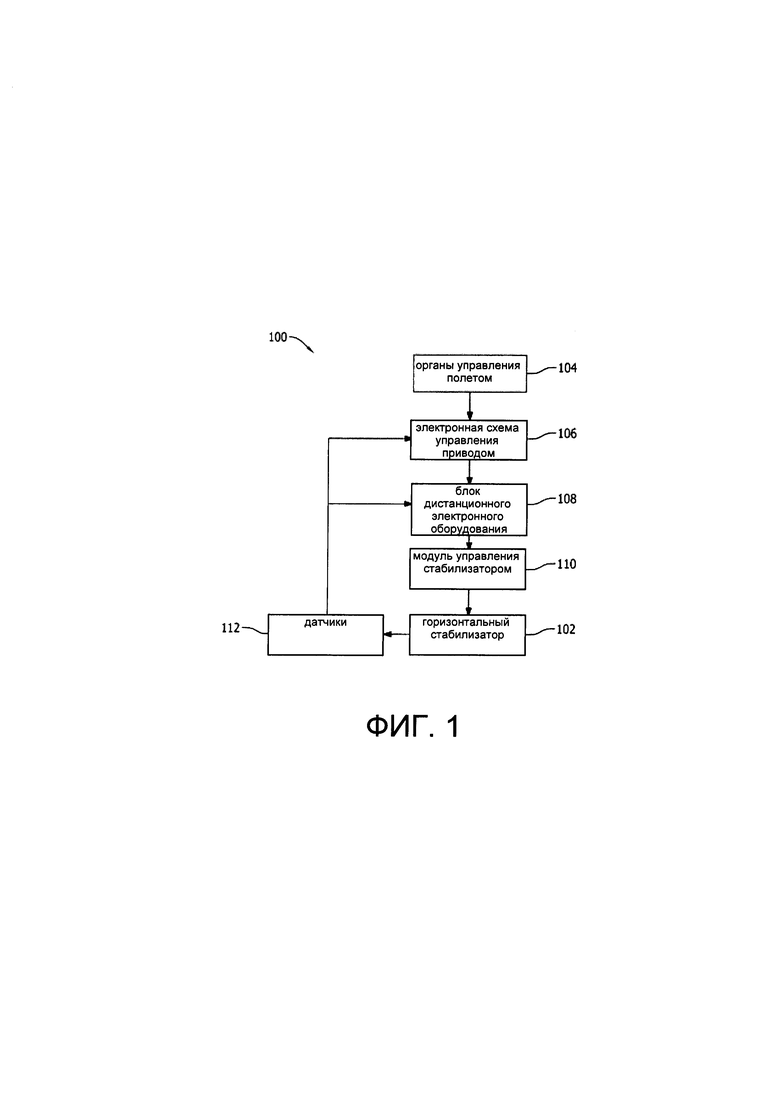
[0015] На ФИГ. 1 показана примерная функциональная схема системы 100 управления полетом для управления работой горизонтального стабилизатора 102. Система 100 управления полетом включает в себя органы 104 управления полетом, электронную схему 106 управления приводом, блок 108 дистанционного электронного оборудования, модуль 110 управления стабилизатором и датчики 112.
[0016] Органы 104 управления полетом представляют собой физические интерфейсы, имеющиеся у пилота для ввода команд управления полетом, в том числе, например, тангажом, креном и рысканием, а также ввода других сигналов управления, таких как, например, сигналов триммирования и газа. Входные сигналы управления, принятые в органах 104 управления полетом, передают на электронную схему 106 управления приводом. Электронная схема 106 управления приводом может принимать входные сигналы управления от органов 104 управления полетом, а также данные от датчиков 112 и других модулей авиационного электронного оборудования или полетных компьютеров. Электронная схема 106 управления приводом вырабатывает управляющие сигналы на основании этих различных входных сигналов управления и данных для управления работой поверхности управления полетом, такой как, например, горизонтальный стабилизатор 102. В общем случае, выработанный управляющий сигнал включает в себя скорость поворота или приведения в действие привода, соединенного с поверхностью управления полетом. В альтернативных вариантах реализации выработанный управляющий сигнал может включать в себя задаваемое командой положение для поверхности управления полетом.
[0017] Электронная схема 106 управления приводом передает управляющий сигнал в блок 108 дистанционного электронного оборудования, который управляет модулем 110 управления стабилизатором, включая электрический привод или гидравлический привод (ни один из них не показан), соединенный с горизонтальным стабилизатором 102. Блок 108 дистанционного электронного оборудования подает питание в модуль 110 управления стабилизатором на основании управляющего сигнала. Во многих летательных аппаратах для блока 108 дистанционного электронного оборудования необходимо использование управляющих сигналов от двух независимых электронных схем 106 управления приводом для управления модулем 110 управления стабилизатором. Такая избыточность обеспечивает целостность управляющих сигналов, которые принимает блок 108 дистанционного электронного оборудования, для управления горизонтальным стабилизатором 102. В некоторых вариантах реализации блок 108 дистанционного электронного оборудования управляет электрической энергией с использованием реле, переключателей или другой силовой электроники которая, например, подает питание в модуль 110 управления стабилизатором. В других вариантах реализации блок 108 дистанционного электронного оборудования управляет подачей гидравлической энергии в модуль 110 управления стабилизатором с использованием, например, соленоидов, клапанов и насосов. В ответ на это модуль 110 управления стабилизатором приводит в действие горизонтальный стабилизатор 102.
[0018] Датчики 112 обеспечивают данные обратной связи на электронную схему 106 управления приводом, блок 108 дистанционного электронного оборудования или на то и другое для обеспечения возможности управления горизонтальным стабилизатором 102 с обратной связью. Например, датчики 112 могут включать в себя один или более датчиков положения, выполненных с возможностью обнаружения приведения в действие горизонтального стабилизатора 102. Затем датчики 112 передают сигнал датчика в электронную схему 106 управления приводом, блок 108 дистанционного электронного оборудования или туда и туда.
[0019] В обычной системе управления полетом для горизонтального стабилизатора 102 задается два независимых сигнальных тракта управления полетом, каждый из которых снабжен двумя электронными схемами 106 управления приводом, блоком 108 дистанционного электронного оборудования и модулем 110 управления стабилизатором для приведения в действие горизонтального стабилизатора 102. Соответственно, такая система управления полетом для горизонтального стабилизатора 102 включает в себя четыре электронные схемы 106 управления приводом, два блока 108 дистанционного электронного оборудования и два модуля 110 управления стабилизаторами. Таким образом, отказ электронных схем 106 управления приводом, блока 108 дистанционного электронного оборудования или модуля 110 управления стабилизатором в одном сигнальном тракте управления полетом приведет к невозможности использования сигнального тракта управления полетом, а избыточные сигнальные тракты управления полетом обеспечат сохранение управляемости горизонтальных стабилизаторов 102 независимо от отказавшего сигнального тракта управления полетом. В настоящем документе предполагается, что отказоустойчивая система управления полетом может быть получена с использованием трех электронных схем 106 управления приводом вместо четырех, что устраняет необходимость использования четвертой электронной схемы 106 управления приводом и, соответственно, обеспечивает уменьшение веса, громоздкости, затрат и упрощение всей конструкции.
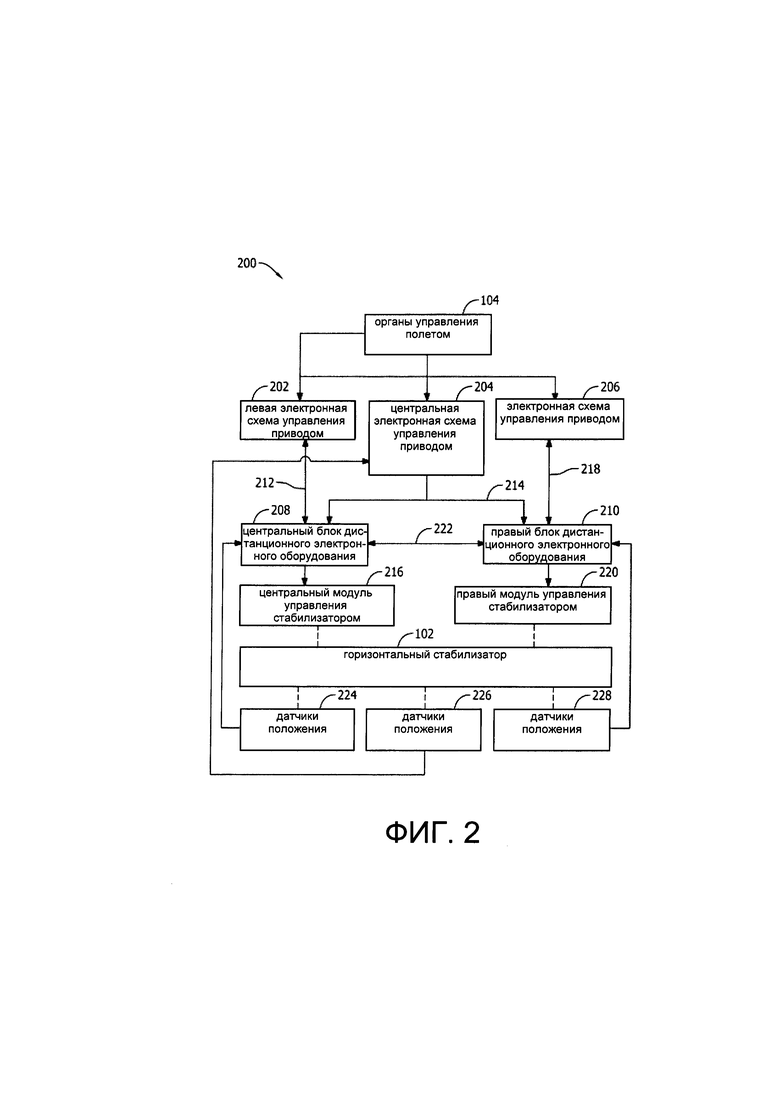
[0020] На ФИГ. 2 показана примерная схема системы 200 управления полетом для горизонтального стабилизатора 102. Система 200 управления полетом включает в себя левую электронную схему 202 управления приводом, центральную электронную схему 204 управления приводом и правую электронную схему 206 управления приводом, каждая из которых соединена с органами 104 управления полетом. Каждая из левой электронной схемы 202 управления приводом, центральной электронной схемы 204 управления приводом и правой электронной схемы 206 управления приводом включает в себя вычислительную систему, которая принимает различные входные сигналы от органов 104 управления полетом, датчиков 112 и других модулей авиационного электронного оборудования с независимой выработкой управляющих сигналов для выдачи команд на горизонтальный стабилизатор 102. Левая электронная схема 202 управления приводом, центральная электронная схема 204 управления приводом и правая электронная схема 206 управления приводом изолированы друг от друга и не имеют возможности обмениваться данными друг с другом, чтобы избежать отрицательного влияния каких-либо ошибок при обработке или в данных одной электронной схемы управления приводом на обработку или данные другой электронной схемы управления приводом. Такие ошибки могут возникать в результате, например, отказа аппаратных средств или программного обеспечения в одной из левой электронной схемы 202 управления приводом, центральной электронной схемы 204 управления приводом и правой электронной схемы 206 управления приводом, ошибки в данных, принятых одной из левой электронной схемы 202 управления приводом, центральной электронной схемы 204 управления приводом и правой электронной схемы 206 управления приводом, или ошибки в каналах связи, ведущих к и от левой электронной схемы 202 управления приводом, центральной электронной схемы 204 управления приводом и правой электронной схемы 206 управления приводом.
[0021] Система 200 управления полетом включает в себя центральный блок 208 дистанционного электронного оборудования и правый блок 210 дистанционного электронного оборудования. Управление горизонтальным стабилизатором 102 поддерживают одним из центрального блока 208 дистанционного электронного оборудования и правого блока 210 дистанционного электронного оборудования. Для каждого из центрального блока 208 дистанционного электронного оборудования и правого блока 210 дистанционного электронного оборудования необходимо два управляющих сигнала, вырабатываемых независимо двумя электронными схемами управления приводом. В общем случае, два управляющих сигнала должны быть согласованы по задаваемому ими приведению в действие горизонтального стабилизатора 102 в пределах определенного уровня допуска. Требование использовать два согласованных управляющих сигнала обеспечивает выдачу команд на горизонтальный стабилизатор 102 центральным блоком 208 дистанционного электронного оборудования и правым блоком 210 дистанционного электронного оборудования на основании выверенных входных сигналов управления полетом, данных датчиков и данных от других модулей авиационного электронного оборудования.
[0022] Центральный блок 208 дистанционного электронного оборудования соединен с левой электронной схемой 202 управления приводом и центральной электронной схемой 204 управления приводом. Центральный блок 208 дистанционного электронного оборудования выполнен с возможностью управления горизонтальным стабилизатором 102 на основании управляющих сигналов от левой электронной схемы 202 управления приводом и центральной электронной схемы 204 управления приводом. В частности, левая электронная схема 202 управления приводом сообщается с центральным блоком 208 дистанционного электронного оборудования по шине 212 данных. Левая электронная схема 202 управления приводом передает управляющий сигнал, например, по шине 212 данных, включая, например, скорость поворота, скорость приведения в действие или задаваемое командой положение для горизонтального стабилизатора 102. Подобным образом, центральная электронная схема 204 управления приводом передает управляющие сигналы в центральный блок 208 дистанционного электронного оборудования с использованием дискретных выводов 214 центральной электронной схемы 204 управления приводом. Во время нормальной работы центральный блок 208 дистанционного электронного оборудования управляет центральным модулем 216 управления стабилизатором на основании комбинации управляющего сигнала от левой электронной схемы 202 управления приводом и управляющего сигнала от центральной электронной схемы 204 управления приводом.
[0023] Схожим образом, правый блок 210 дистанционного электронного оборудования соединен с правой электронной схемой 206 управления приводом и центральной электронной схемой 204 управления приводом. Правый блок 210 дистанционного электронного оборудования выполнен с возможностью управления горизонтальным стабилизатором 102 на основании управляющих сигналов от правой электронной схемы 206 управления приводом и центральной электронной схемы 204 управления приводом. В частности, правая электронная схема 206 управления приводом сообщается с правым блоком 210 дистанционного электронного оборудования, например, по шине 218 данных. Правая электронная схема 206 управления приводом передает управляющий сигнал по шине 218 данных, включающий, например, скорость поворота, скорость приведения в действие или задаваемое командой положение для горизонтального стабилизатора 102. Подобным образом, центральная электронная схема 204 управления приводом передает управляющие сигналы в правый блок 210 дистанционного электронного оборудования с использованием дискретных выводов 214. Во время нормальной работы правый блок 210 дистанционного электронного оборудования управляет правым модулем 220 управления стабилизатором на основании комбинации управляющего сигнала от правой электронной схемы 206 управления приводом и управляющего сигнала от центральной электронной схемы 204 управления приводом.
[0024] В альтернативных вариантах реализации шина 212 данных, дискретные выводы 214 и шина 218 данных могут быть заменены любым каналом связи, подходящим для передачи необходимых данных между левой электронной схемой 202 управления приводом, центральной электронной схемой 204 управления приводом, правой электронной схемой 206 управления приводом, центральным блоком 208 дистанционного электронного оборудования и правым блоком 210 дистанционного электронного оборудования. Например, дискретные выводы 214 от центральной электронной схемы 204 управления приводом могут включать в себя мультидискретные кодированные выходные сигналы, такие как трехбитовый аналоговый сигнал. Подобным образом, например, шина 212 данных может передавать большой объем данных от левой электронной схемы 202 управления приводом, включая, например, скорость поворота, скорость приведения в действие, направление приведения в действие или задаваемое командой положение, и центральный блок 208 дистанционного электронного оборудования может передавать различные данные обратной связи по шине 212 данных в левую электронную схема 202 управления приводом.
[0025] Каждый из центрального модуля 216 управления стабилизатором и правого модуля 220 управления стабилизатором включает в себя клапаны, соленоиды, реле или другие переключательные компоненты для подачи питания на привод, соединенный с горизонтальным стабилизатором 102. Например, в вариантах реализации, в которых горизонтальный стабилизатор 102 приводят в действие гидравлическим приводом, центральный модуль 216 управления стабилизатором и правый модуль 220 управления стабилизатором включают в себя клапаны и соленоиды для управления гидравлическим давлением в приводе. Подобным образом, в вариантах реализации, в которых горизонтальный стабилизатор 102 приводят в действие электрическим приводом, центральный модуль 216 управления стабилизатором и правый модуль 220 управления стабилизатором включают в себя реле, переключатели и другую силовую электронику для управления подачей электрической энергии на привод. Центральный блок 208 дистанционного электронного оборудования преобразует, например, команду скорости поворота или скорости приведения в действие, которую он принимает от левой электронной схемы 202 управления приводом и центральной электронной схемы 204 управления приводом, в один или более сигналов для управления энергией, подаваемой на различные клапаны, соленоиды, реле и переключатели центрального модуля 216 управления стабилизатором, и таким образом управляет работой привода, соединенного с горизонтальным стабилизатором 102. Подобным образом, правый блок 210 дистанционного электронного оборудования преобразует, например, команду скорости поворота или скорости приведения в действие, которую он принимает от правой электронной схемы 206 управления приводом и центральной электронной схемы 204 управления приводом, в один или более сигналов для управления энергией, подаваемой на различные клапаны, соленоиды, реле и переключатели правого модуля 220 управления стабилизатором, и таким образом управляет работой привода, соединенного с горизонтальным стабилизатором 102.
[0026] В случае возникновения ошибки в левой электронной схеме 202 управления приводом, или если центральный блок 208 дистанционного электронного оборудования по какой-либо другой причине не в состоянии принимать достоверный управляющий сигнал по шине 212 данных от левой электронной схемы 202 управления приводом, правый блок 210 дистанционного электронного оборудования выполнен с возможностью управления правым модулем 220 управления стабилизатором на основании управляющих сигналов, принятых от центральной электронной схемы 204 управления приводом и правой электронной схемы 206 управления приводом. Подобным образом, в случае возникновения ошибки в правой электронной схеме 206 управления приводом, или если правый блок 210 дистанционного электронного оборудования по какой-либо другой причине не в состоянии принимать достоверный управляющий сигнал по шине 218 данных от правой электронной схемы 206 управления приводом, центральный блок 208 дистанционного электронного оборудования выполнен с возможностью управления центральным модулем 216 управления стабилизатором на основании управляющих сигналов, принятых от левой электронной схемы 202 управления приводом и центральной электронной схемы 204 управления приводом. Таким образом, система 200 управления полетом сохраняет управление горизонтальным стабилизатором 102 в случае, когда имеется отказ в одной из левой электронной схемы 202 управления приводом или правой электронной схемы 206 управления приводом.
[0027] Центральная электронная схема 204 управления приводом используется совместно, и она передает управляющие сигналы как в центральный блок 208 дистанционного электронного оборудования, так и в правый блок 210 дистанционного электронного оборудования, в отличие от центрального блока 208 дистанционного электронного оборудования и правого блока 210 дистанционного электронного оборудования, каждый из которых имеет отдельные устройства на основе электронной схемы управления приводом в своих соответствующих сигнальных трактах управления полетом. В случае если центральная электронная схема 204 управления приводом не исправна или не в состоянии передавать достоверный управляющий сигнал на центральный блок 208 дистанционного электронного оборудования и правый блок 210 дистанционного электронного оборудования с использованием дискретных выводов 214, только левая электронная схема 202 управления приводом и правая электронная схема 206 управления приводом в состоянии вырабатывать достоверные управляющие сигналы. В таком состоянии отказа ни центральный блок 208 дистанционного электронного оборудования, ни правый блок 210 дистанционного электронного оборудования не принимает достоверные управляющие сигналы непосредственно от двух независимых электронных схем управления приводом. Система 200 управления полетом также включает в себя линию 222 связи между центральным блоком 208 дистанционного электронного оборудования и правым блоком 210 дистанционного электронного оборудования. Линия 222 связи иногда называется здесь альтернативным сигнальным трактом для ручки управления. Центральный блок 208 дистанционного электронного оборудования и правый блок 210 дистанционного электронного оборудования выполнены с возможностью обеспечения сообщения, т.е. передачи и приема, данных от соответствующих управляющих сигналов в другой блок дистанционного электронного оборудования по линии 222 связи. Например, когда центральная электронная схема 204 управления приводом неисправна и каждый из центрального блока 208 дистанционного электронного оборудования и правого блока 210 дистанционного электронного оборудования принимает только один достоверный управляющий сигнал от левой электронной схемы 202 управления приводом и правой электронной схемы 206 управления приводом, центральный блок 208 дистанционного электронного оборудования и правый блок 210 дистанционного электронного оборудования передают принятые ими управляющие сигналы друг другу. Например, если центральный блок 208 дистанционного электронного оборудования обнаруживает, что центральная электронная схема 204 управления приводом не передает достоверный управляющий сигнал по дискретным выводам 214, центральный блок 208 дистанционного электронного оборудования принимает по меньшей мере часть управляющего сигнала, поступающего от правой электронной схемы 206 управления приводом и перенаправляемого правым блоком 210 дистанционного электронного оборудования по линии 222 связи.
[0028] В некоторых вариантах реализации при возникновении отказа в левой электронной схеме 202 управления приводом или правой электронной схеме 206 управления приводом, центральный блок 208 дистанционного электронного оборудования и правый блок 210 дистанционного электронного оборудования могут схожим образом использовать совместно, по линии 222 связи, принятые управляющие сигналы, поступающие от их соответствующих отказавших устройств на основе электронной схемы управления приводом. Посредством использования линии 222 связи как центральный блок 208 дистанционного электронного оборудования, так и правый блок 210 дистанционного электронного оборудования могут продолжить управление работой, несмотря на отказ какой-либо одной из левой электронной схемы 202 управления приводом и правой электронной схемы 206 управления приводом.
[0029] Система 200 управления полетом включает в себя датчики 224, 226 и 228 положения, соединенные с горизонтальным стабилизатором и выполненные с возможностью измерения положения горизонтального стабилизатора. Датчики 224 и 228 положения выдают данные обратной связи по положению горизонтального стабилизатора 102 в центральный блок 208 дистанционного электронного оборудования и правый блок 210 дистанционного электронного оборудования, соответственно. Датчик 226 положения выдает данные обратной связи по положению горизонтального стабилизатора 102 в центральную электронную схему 204 управления приводом. В некоторых вариантах реализации данные, принятые в центральном блоке 208 дистанционного электронного оборудования от датчика 224 положения, могут быть переданы в правый блок 210 дистанционного электронного оборудования по линии 222 связи. Подобным образом, данные, принятые в правом блоке 210 дистанционного электронного оборудования от датчика 228 положения, могут быть переданы в правый блок 208 дистанционного электронного оборудования по линии 222 связи.
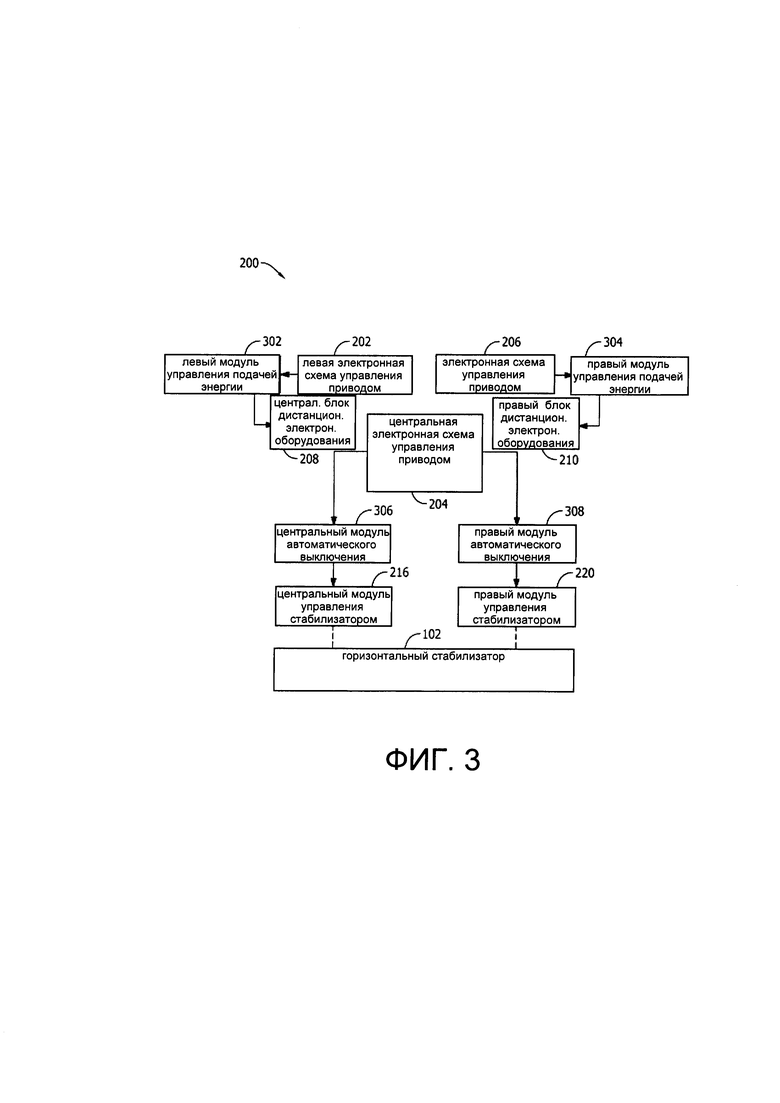
[0030] На ФИГ. 3 приведена еще одна структурная схема системы 200 управления полетом. Система 200 управления полетом включает в себя левый модуль 302 управления подачей энергии (power commissioning module, PCM) и правый модуль 304 управления подачей энергии. Левый модуль 302 управления подачей энергии соединен с левой электронной схемой 202 управления приводом и выполнен с возможностью регулировки питания, подаваемого в центральный блок 208 дистанционного электронного оборудования. Например, если левая электронная схема 202 управления приводом определяет, что центральный блок 208 дистанционного электронного оборудования неисправен или должен быть отключен иным образом, или что горизонтальный стабилизатор 102 не приводится в действие должным образом, левая электронная схема 202 управления приводом передает команду в левый модуль 302 управления подачей энергии на прекращение подачи энергии от центрального блока 208 дистанционного электронного оборудования. Подобным образом, правый модуль 304 управления подачей энергии соединен с правой электронной схемой 206 управления приводом и выполнен с возможностью регулировки питания, подаваемого в правый блок 210 дистанционного электронного оборудования. Например, если правая электронная схема 206 управления приводом определяет, что правый блок 210 дистанционного электронного оборудования неисправен или должен быть отключен иным образом, или что горизонтальный стабилизатор 102 не приводится в действие должным образом, правая электронная схема 206 управления приводом передает команду в правый модуль 304 управления подачей энергии на прекращение подачи энергии от правого блока 210 дистанционного электронного оборудования.
[0031] Система 200 управления полетом включает в себя центральный модуль 306 автоматического выключения и правый модуль 308 автоматического выключения. Центральный модуль 306 автоматического выключения соединен с центральным модулем 216 управления стабилизатором и выполнен с возможностью включения и отключения центрального модуля 216 управления стабилизатором посредством прекращения подачи электрической или гидравлической энергии. Подобным образом, правый модуль 308 автоматического выключения соединен с правым модулем 220 управления стабилизатором и выполнен с возможностью включения и отключения правого модуля 220 управления стабилизатором. Каждый из центрального модуля 306 автоматического выключения и правого модуля 308 автоматического выключения соединен с центральной электронной схемой 204 управления приводом. Если центральная электронная схема 204 управления приводом определяет, что горизонтальный стабилизатор 102 не приводится в действие должным образом, или что левая электронная схема 202 управления приводом или центральный блок 208 дистанционного электронного оборудования отказали или неисправны, центральная электронная схема 204 управления приводом может выдать команду в центральный модуль 306 автоматического выключения на отключение центрального модуля 216 управления стабилизатором посредством прекращения подачи электрической или гидравлической энергии. Подобным образом, если центральная электронная схема 204 управления приводом определяет, что правая электронная схема 206 управления приводом или правый блок 210 дистанционного электронного оборудования отказали или неисправны, центральная электронная схема 204 управления приводом может выдать команду в правый модуль 308 автоматического выключения на отключение правого модуля 220 управления стабилизатором.
[0032] Левый модуль 302 управления подачей энергии, правый модуль 304 управления подачей энергии, центральный модуль 306 автоматического выключения и правый модуль 308 автоматического выключения обеспечивают избыточную возможность выключения для любой из левой электронной схемы 202 управления приводом, центральной электронной схемы 204 управления приводом и правой электронной схемы 206 управления приводом на отключение неисправного сигнального тракта управления полетом при сохранении управления горизонтальным стабилизатором 102 через другой сигнальный тракт управления полетом.
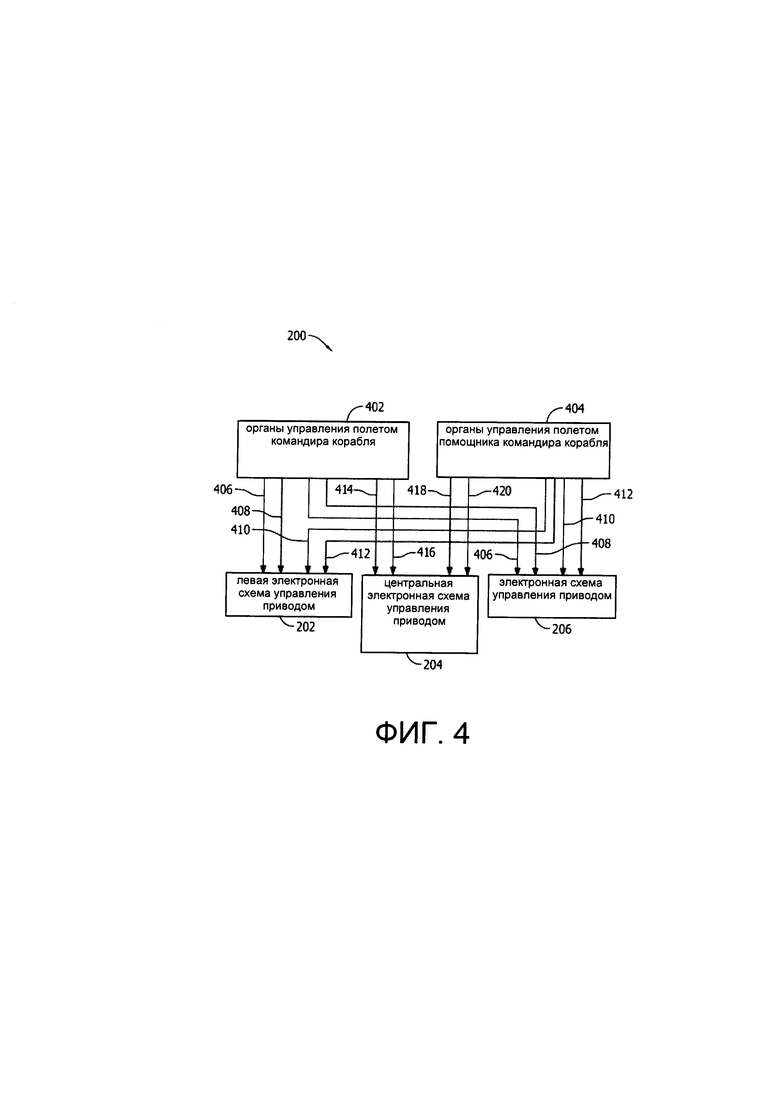
[0033] На ФИГ. 4 приведена еще одна структурная схема системы 200 управления полетом, включающая в себя левую электронную схему 202 управления приводом, центральную электронную схему 204 управления приводом и правую электронную схему 206 управления приводом. Система 200 управления полетом включает в себя органы 402 управления полетом командира корабля и органы 404 управления полетом помощника командира корабля, каждые из которых могут включать в себя, например, ручку управления, штурвальную колонку или штурвал с различными встроенными переключателями и/или кнопками управления полетом, такими как, например, переключатели механизма эффекта триммирования.
[0034] В отношении горизонтального стабилизатора 102, органы 402 управления полетом командира корабля передают, например, дискретный сигнал 406 перемещения триммера вверх и дискретный сигнал 408 перемещения триммера вниз в левую электронную схему 202 управления приводом. Дискретный сигнал 406 перемещения триммера вверх и дискретный сигнал 408 перемещения триммера вниз дублируются для правой электронной схемы 206 управления приводом. Схожим образом, органы 404 управления полетом помощника командира корабля передают, например, дискретный сигнал 410 перемещения триммера вверх и дискретный сигнал 412 перемещения триммера вниз в правую электронную схему 206 управления приводом. Дискретный сигнал 410 перемещения триммера вверх и дискретный сигнал 412 перемещения триммера вниз подобным образом дублируются для левой электронной схемы 202 управления приводом.
[0035] Органы 402 управления полетом командира корабля также передают дискретный сигнал 414 перемещения ручки управления вверх и дискретный сигнал 416 перемещения ручки управления вниз в центральную электронную схему 204 управления приводом. Органы 404 управления полетом помощника командира корабля схожим образом передают в центральную электронную схему 204 управления приводом дискретный сигнал 418 перемещения ручки управления вверх и дискретный сигнал 420 перемещения ручки управления вниз.
[0036] Каждая из левой электронной схемы 202 управления приводом и правой электронной схемы 206 управления приводом выполнены с возможностью приема входных сигналов от органов 402 управления полетом командира корабля и органов 404 управления полетом помощника командира корабля и независимо определяет соответствующее управление для горизонтального стабилизатора 102. Схожим образом, центральная электронная схема 204 управления приводом принимает входные сигналы от органов 402 управления полетом командира корабля и органов 404 управления полетом помощника командира корабля и определяет соответствующее управление для горизонтального стабилизатора 102 независимо от вычислений, произведенных левой электронной схемой 202 управления приводом и правой электронной схемой 206 управления приводом.
[0037] На ФИГ. 5 представлена блок-схема приводимого в качестве примера способа 500 использования системы 200 управления полетом, показанной на ФИГ. 2-4, для управления работой поверхности управления полетом, такой как, например, горизонтальный стабилизатор 102. Первый блок дистанционного электронного оборудования, например центральный блок 208 дистанционного электронного оборудования, принимает 510 первый управляющий сигнал от первой электронной схемы управления приводом, например левой электронной схемы 202 управления приводом. Первый управляющий сигнал представляет команды для управления работой привода, соединенного с поверхностью управления полетом. Второй блок дистанционного электронного оборудования, например правый блок 210 дистанционного электронного оборудования, принимает 520 второй управляющий сигнал от второй электронной схемы управления приводом, например правой электронной схемы 206 управления приводом. Второй управляющий сигнал также представляет команды для управления работой привода. Первая электронная схема управления приводом и вторая электронная схема управления приводом вырабатывают первый и второй управляющий сигнал независимо друг от друга.
[0038] Второй блок дистанционного электронного оборудования, например правый блок 210 дистанционного электронного оборудования, передает 530 второй управляющий сигнал в первый блок дистанционного электронного оборудования, например центральный блок 208 дистанционного электронного оборудования. Второй управляющий сигнал передают 530 по линии 222 связи между центральным блоком 208 дистанционного электронного оборудования и правым блоком 210 дистанционного электронного оборудования. Затем центральный блок 208 дистанционного электронного оборудования управляет работой 540 привода на основании первого управляющего сигнала, принятого от левой электронной схемы 202 управления приводом, и второго управляющего сигнала, поступающего от правой электронной схемы 206 управления приводом и принятого из правого блока 210 дистанционного электронного оборудования.
[0039] В альтернативном варианте реализации центральный блок 208 дистанционного электронного оборудования может передавать 530 первый управляющий сигнал по линии 222 связи в правый блок 210 дистанционного электронного оборудования. Далее правый блок 210 дистанционного электронного оборудования управляет работой 540 привода на основании второго управляющего сигнала, принятого от правой электронной схемы 206 управления приводом, и первого управляющего сигнала, поступающего от левой электронной схемы 202 управления приводом и принятого от центрального блока 208 дистанционного электронного оборудования.
[0040] Центральный блок 208 дистанционного электронного оборудования и правый блок 210 дистанционного электронного оборудования также принимают третий управляющий сигнал от третьей электронной схемы управления приводом, например центральной электронной схемы 204 управления приводом. В нормальных условиях работы центральный блок 208 дистанционного электронного оборудования управляет работой привода на основании первого управляющего сигнала от левой электронной схемы 202 управления приводом и третьего управляющего сигнала от центральной электронной схемы 204 управления приводом. Подобным образом, правый блок 210 дистанционного электронного оборудования управляет работой привода на основании второго управляющего сигнала от правой электронной схемы 206 управления приводом и третьего управляющего сигнала от центральной электронной схемы 204 управления приводом.
[0041] Каждый из первого и второго блоков дистанционного электронного оборудования, например центрального блока 208 дистанционного электронного оборудования и правого блока 210 дистанционного электронного оборудования, выполненных с возможностью обнаружения недостоверности управляющих сигналов от их соответствующих электронных схем управления приводом. Например, правый блок 210 дистанционного электронного оборудования выполнен с возможностью обнаружения недостоверности третьего управляющего сигнала от третьей электронной схемы управления приводом, например центральной электронной схемы 204 управления приводом. В качестве реакции на указанное обнаружение инициируют передачу второго управляющего сигнала из правого блока 210 дистанционного электронного оборудования в центральный блок 208 дистанционного электронного оборудования. Схожим образом, обнаружение может быть выполнено центральным блоком 208 дистанционного электронного оборудования, и передача управляющего сигнала может осуществляться либо в любом направлении от центрального блока 208 дистанционного электронного оборудования в правый блок 210 дистанционного электронного оборудования или от правого блока 210 дистанционного электронного оборудования в центральный блок 208 дистанционного электронного оборудования. Кроме того, правый блок 210 дистанционного электронного оборудования может обнаруживать недостоверность второго управляющего сигнала от второй электронной схемы управления приводом, например правой электронной схемы 206 управления приводом. В таком состоянии отказа отключают правый блок 210 дистанционного электронного оборудования и, возможно, правый модуль 220 управления стабилизатором.
[0042] В некоторых вариантах реализации первая электронная схема управления приводом, вторая электронная схема управления приводом и третья электронная схема управления приводом, например левая электронная схема 202 управления приводом, правая электронная схема 206 управления приводом и центральная электронная схема 204 управления приводом, принимают входной сигнал управления от органов 104 управления полетом. Левая электронная схема 202 управления приводом, правая электронная схема 206 управления приводом и центральная электронная схема 204 управления приводом вырабатывают свои соответствующие управляющие сигналы независимо и на основании по меньшей мере указанного входного сигнала управления.
[0043] В некоторых вариантах реализации способ 500 включает прием сигнала датчика от одного или более датчиков 224, 226 и 228 положения. Например, центральный блок 208 дистанционного электронного оборудования принимает сигнал датчика от датчика 224 положения, представляющий положение горизонтального стабилизатора 102. Центральный блок 208 дистанционного электронного оборудования может в некоторых условиях, например во время отказа другого датчика положения, передавать сигнал датчика, поступающий от датчика 224 положения из центрального блока 208 дистанционного электронного оборудования в правый блок 210 дистанционного электронного оборудования по линии 222 связи.
[0044] Описанные выше варианты реализации систем управления полетом и способов использования обеспечивают систему управления полетом для горизонтального стабилизатора, которая включает в себя избыточные сигнальные тракты управления полетом, с использованием трех устройств на основе электронных схем управления приводом вместо четырех. Такие варианты реализации также используют линию связи между устройствами на основе блока дистанционного электронного оборудования для обеспечения возможности совместного использования данных параллельными сигнальными трактами управления полетом, в частности в состояниях отказа. Например, когда используемая совместно электронная схема управления приводом неисправна, два блока дистанционного электронного оборудования совместно используют управляющие сигналы для обеспечения для одного или обоих блоков дистанционного электронного оборудования возможности сохранения управления горизонтальным стабилизатором необходимыми двумя управляющими сигналами, поступающими от двух независимых электронных схем управления приводом. Линия связи между устройствами на основе блока дистанционного электронного оборудования также обеспечивает возможность совместного использования других данных блоками дистанционного электронного оборудования, включая, например, данные датчиков для горизонтального стабилизатора.
[0045] В качестве примера, технический результат способов, систем и устройств, описанных в настоящем документе, включает в себя по меньшей мере одно из следующего:
(a) улучшение работы в условиях отказа за счет использования альтернативной линии связи устройствами на основе блока дистанционного электронного оборудования;
(b) уменьшение веса и затрат за счет устранения одного устройства на основе электронных схем управления приводом для управления горизонтальным стабилизатором и/или
(с) улучшение отказоустойчивости за счет совместного использования сигналов и данных устройствами на основе блока дистанционного электронного оборудования.
[0046] Некоторые варианты реализации включают использование одного или более электронных, процессорных или вычислительных устройств. При использовании в настоящем документе термины "процессор" и "компьютер" и связанные с ними термины, например "процессорное устройство", "вычислительное устройство" и "контроллер", не ограничиваются только этими интегральными схемами, называемыми в данной области техники как компьютер, но в широком смысле относятся к процессору, процессорному устройству, контроллеру, центральному процессору общего назначения (central processing unit, CPU), блоку обработки графических данных (graphics processing unit, GPU), микроконтроллеру, микрокомпьютеру, программируемой логической схеме (programmable logic circuit, PLC), процессору с сокращенным набором команд (reduced instruction set computer, RISC), программируемой пользователем вентильной матрице (field programmable gate array, FPGA), устройству с цифровой обработкой сигналов (digital signal processing, DSP), специализированной интегральной схеме (application specific integrated circuit, ASIC) и любой другой схеме или любому другому процессорному устройству, выполненному с возможностью исполнения функций, описанных в настоящем документе, и эти термины используются в настоящем документе взаимозаменяемо. Вышеприведенные примеры являются только примерами и как таковые не предназначены для ограничения каким-либо образом определения и/или значения терминов процессор, процессорное устройство и связанных с ними терминов.
[0047] В вариантах реализации, описанных в настоящем документе, память может включать в себя, но без ограничения, некратковременный компьютерочитаемый носитель, такой как флэш-память, оперативную память, память ПЗУ, память EPROM, память EEPROM и энергонезависимую оперативную память NVRAM. При использовании в настоящем документе термин "некратковременный компьютерочитаемый носитель" предназначен для обозначения любого материального, компьютерочитаемого носителя, в том числе, без ограничения, некратковременных компьютерных устройств хранения, в том числе, без ограничения, энергозависимых и энергонезависимых носителей, а также съемных и несъемных носителей, таких как прошивка, физическая и виртуальная память, диски CD-ROM, диски DVD и любой другой цифровой источник, такой как сеть или Интернет, а также еще не разработанные цифровые средства, с единственным исключением в виде кратковременного, распространяющегося сигнала. В альтернативном варианте реализации также могут быть использованы гибкий диск, диск (CD-ROM), магнитооптический диск (MOD), диск DVD или какое-либо другое основанное на компьютере устройство, используемое в каком-либо способе или какой-либо технологии для кратковременного и долговременного хранения информации, такой как, компьютерочитаемые инструкции, структуры данных, программные модули и подмодули, или другие данные. Таким образом, способы, описанные в настоящем документе, могут быть закодированы в виде исполняемых инструкций, например "программного обеспечения" и "прошивки", воплощенных в некратковременном компьютерочитаемом носителе. Кроме того, при использовании в настоящем документе термины "программное обеспечение" и "прошивка" взаимозаменяемы и включают в себя любую компьютерную программу, сохраненную в запоминающем устройстве для исполнения с помощью персональных компьютеров, рабочих станций, клиентов и серверов. Такие инструкции, при исполнении их процессором, вынуждают процессор выполнять по меньшей мере часть способов, описанных в настоящем документе.
[0048] Кроме того, в вариантах реализации, описанных в настоящем документе, дополнительные каналы ввода могут представлять собой, но без ограничения, периферийные устройства компьютера, связанные с интерфейсом оператора, такие как мышь и клавиатура. В альтернативном варианте реализации также могут быть использованы другие периферийные устройства компьютера, которые могут включать в себя, например, но без ограничения, сканер. Кроме того, в примерных вариантах реализации, дополнительные каналы вывода могут включать в себя, но без ограничения, монитор интерфейса оператора.
[0049] Системы и способы, описанные в настоящем документе, не ограничены конкретными вариантами реализации, описанными в настоящем документе, однако компоненты систем и/или этапы способов могут быть использованы независимо и отдельно от других компонентов и/или этапов, описанных в настоящем документе.
[0050] Хотя конкретные элементы различных вариантов реализации изобретения могут быть показаны на некоторых чертежах, а на других нет, это используется только для удобства. В соответствии с принципами раскрытия изобретения любой элемент чертежа может быть указан и/или заявлен в формуле изобретения в сочетании с любым элементом любого другого чертежа.
[0051] Некоторые варианты реализации включают использование одного или более электронных или вычислительных устройств. Такие устройства обычно включают в себя процессор, процессорное устройство или контроллер, такой как центральный процессор общего назначения (central processing unit, CPU), блок обработки графических данных (graphics processing unit, GPU), микроконтроллер, процессор с сокращенным набором команд (reduced instruction set computer, RISC), специализированную интегральную схему (ASIC), программируемую логическую схему (programmable logic circuit, PLC), программируемую пользователем вентильную матрицу (field programmable gate array, FPGA), устройство с цифровой обработкой сигналов (digital signal processing, DSP) и/или любую другую схему или процессорное устройство, выполненные с возможностью исполнения функций, описанных в настоящем документе. Способы, описанные в настоящем документе, могут быть закодированы в виде исполняемых инструкций, воплощенных в компьютерочитаемом носителе, в том числе, без ограничения, устройстве хранения и/или запоминающем устройстве. Такие инструкции, при исполнении процессорным устройством вызывают выполнение процессорным устройством по меньшей мере части способов, описанных в настоящем документе. Вышеприведенные примеры являются только примерами и как таковые не предназначены для ограничения каким-либо образом определения и/или значения терминов процессор, процессорное устройство и контроллер.
[0052] В вариантах реализации, описанных в настоящем документе, память может включать в себя, но без ограничения, компьютерочитаемый носитель, такой как память ОЗУ, и компьютерочитаемый энергонезависимый носитель, такой как флэш-память. В альтернативном варианте реализации могут быть использованы гибкий диск, диск CD-ROM, магнитооптический диск (MOD) и/или диск DVD также. Также, в вариантах реализации, описанных в настоящем документе, дополнительные каналы ввода могут представлять собой, но без ограничения, периферийные устройства компьютера, связанные с интерфейсом оператора, такие как мышь и клавиатура. В альтернативном варианте реализации также могут быть использованы другие периферийные устройства компьютера, которые могут включать в себя, например, но без ограничения, сканер. Кроме того, в примерных вариантах реализации, дополнительные каналы вывода могут включать в себя, но без ограничения, монитор интерфейса оператора.
Кроме того, раскрытие настоящего изобретения содержит варианты реализации согласно следующим пунктам:
Пункт 1. Система управления полетом для поверхности управления полетом, содержащая:
первую электронную схему управления приводом, выполненную с возможностью выработки первого управляющего сигнала для поверхности управления полетом;
вторую электронную схему управления приводом, выполненную с возможностью выработки второго управляющего сигнала для поверхности управления полетом;
третью электронную схему управления приводом, выполненную с возможностью выработки третьего управляющего сигнала для поверхности управления полетом;
первый блок дистанционного электронного оборудования, соединенный с первой электронной схемой управления приводом и второй электронной схемой управления приводом и выполненный с возможностью управления работой привода, соединенного с поверхностью управления полетом, на основании первого управляющего сигнала и второго управляющего сигнала; и
второй блок дистанционного электронного оборудования, соединенный со второй электронной схемой управления приводом и третьей электронной схемой управления приводом и выполненный с возможностью управления работой привода на основании второго управляющего сигнала и третьего управляющего сигнала.
Пункт 2. Система управления полетом по пункту 1, в которой первая электронная схема управления приводом, вторая электронная схема управления приводом и третья электронная схема управления приводом соответственно изолированы друг от друга и не имеют возможности обмениваться данными друг с другом.
Пункт 3. Система управления полетом по любому из пунктов 1-2, в которой первый блок дистанционного электронного оборудования также соединен со вторым блоком дистанционного электронного оборудования альтернативным сигнальным трактом.
Пункт 4. Система управления полетом по пункту 3, в которой первый блок дистанционного электронного оборудования также выполнен с возможностью передачи по меньшей мере части первого управляющего сигнала по альтернативному сигнальному тракту во второй блок дистанционного электронного оборудования.
Пункт 5. Система управления полетом по пункту 4, в которой первый блок дистанционного электронного оборудования также выполнен с возможностью передачи по меньшей мере указанной части первого управляющего сигнала по альтернативному сигнальному тракту во второй блок дистанционного электронного оборудования, когда второй блок дистанционного электронного оборудования не принимает второй управляющий сигнал от второй электронной схемы управления приводом,
причем второй блок дистанционного электронного оборудования также выполнен с возможностью управления работой привода на основании третьего управляющего сигнала и по меньшей мере указанной части первого управляющего сигнала, принятого по альтернативному сигнальному тракту.
Пункт 6. Система управления полетом по любому из пунктов 1-5, в которой каждый из первого блока дистанционного электронного оборудования и второго блока дистанционного электронного оборудования также выполнен с возможностью управления работой привода только по приему соответствующих управляющих сигналов, поступающих по меньшей мере от двух из первой электронной схемы управления приводом, второй электронной схемы управления приводом и третьей электронной схемы управления приводом.
Пункт 7. Система управления полетом по пункту 6, в которой каждый из первого блока дистанционного электронного оборудования и второго блока дистанционного электронного оборудования также выполнен с возможностью управления работой привода независимо друг от друга.
Пункт 8. Способ использования системы управления полетом для управления работой поверхности управления полетом, включающий:
прием в первом блоке дистанционного электронного оборудования первого управляющего сигнала от первой электронной схемы управления приводом для управления работой привода, соединенного с поверхностью управления полетом;
прием во втором блоке дистанционного электронного оборудования второго управляющего сигнала от второй электронной схемы управления приводом для управления работой привода;
передачу второго управляющего сигнала из второго блока дистанционного электронного оборудования в первый блок дистанционного электронного оборудования и
управление работой привода посредством первого блока дистанционного электронного оборудования на основании первого управляющего сигнала и второго управляющего сигнала.
Пункт 9. Способ по пункту 8, также включающий:
прием в первом блоке дистанционного электронного оборудования и втором блоке дистанционного электронного оборудования, третьего управляющего сигнала от третьей электронной схемы управления приводом; и
управление работой привода посредством первого блока дистанционного электронного оборудования на основании первого управляющего сигнала и третьего управляющего сигнала.
Пункт 10. Способ по пункту 9, также включающий:
обнаружение во втором блоке дистанционного электронного оборудования недостоверности третьего управляющего сигнала от третьей электронной схемы управления приводом и
инициирование передачи второго управляющего сигнала из второго блока дистанционного электронного оборудования в первый блок дистанционного электронного оборудования в качестве реакции на указанное обнаружение.
Пункт 11. Способ по любому из пунктов 9-10, также включающий:
обнаружение во втором блоке дистанционного электронного оборудования недостоверности второго управляющего сигнала от второй электронной схемы управления приводом; и
отключение второго блока дистанционного электронного оборудования от управления работой привода в качестве реакции на указанное обнаружение.
Пункт 12. Способ по любому из пунктов 8-11, также включающий:
выработку первого управляющего сигнала в первой электронной схеме управления приводом и
выработку второго управляющего сигнала во второй электронной схеме управления приводом независимо от первой электронной схемы управления приводом.
Пункт 13. Способ по пункту 12, также включающий прием в первой электронной схеме управления приводом и второй электронной схеме управления приводом входного сигнала управления от органов управления полетом,
Причем первый управляющий сигнал и второй управляющий сигнал вырабатывают независимо на основании указанного входного сигнала управления.
Пункт 14. Способ по любому из пунктов 8-13, также включающий:
прием в первом блоке дистанционного электронного оборудования сигнала датчика, представляющего положение поверхности управления полетом; и
передачу сигнала датчика во второй блок дистанционного электронного оборудования.
Пункт 15. Система управления полетом для горизонтального стабилизатора, содержащая:
привод, соединенный с горизонтальным стабилизатором;
первый блок дистанционного электронного оборудования, соединенный с приводом и выполненный с возможностью управления работой указанного привода на основании соответствующих управляющих сигналов, поступающих по меньшей мере от двух электронных схем управления приводом; и
второй блок дистанционного электронного оборудования, соединенный с приводом и выполненный с возможностью управления работой указанного привода независимо от первого блока дистанционного электронного оборудования на основании соответствующих управляющих сигналов, поступающих по меньшей мере от двух электронных схем управления приводом,
причем второй блок дистанционного электронного оборудования также соединен с первым блоком дистанционного электронного оборудования, а также выполнен с возможностью передачи управляющего сигнала, принятого от электронной схемы управления приводом, в первый блок дистанционного электронного оборудования.
Пункт 16. Система управления полетом по пункту 15, также содержащая датчик, соединенный с горизонтальным стабилизатором и выполненный с возможностью обнаружения приведения его в действие и передачи сигнала датчика, представляющего указанное приведение в действие, в первый блок дистанционного электронного оборудования,
причем первый блок дистанционного электронного оборудования также выполнен с возможностью управления работой указанного привода на основании сигнала датчика.
Пункт 17. Система управления полетом по пункту 16, в которой первый блок дистанционного электронного оборудования также выполнен с возможностью передачи сигнала датчика во второй блок дистанционного электронного оборудования.
Пункт 18. Система управления полетом по любому из пунктов 15-17, также содержащая:
первую электронную схему управления приводом, соединенную с первым блоком дистанционного электронного оборудования и выполненную с возможностью передачи в него первого управляющего сигнала;
вторую электронную схему управления приводом, соединенную с первым блоком дистанционного электронного оборудования и вторым блоком дистанционного электронного оборудования, и выполненную с возможностью передачи второго управляющего сигнала как в первый блок дистанционного электронного оборудования, так и во второй блок дистанционного электронного оборудования; и
третью электронную схему управления приводом, соединенную со вторым блоком дистанционного электронного оборудования и выполненную с возможностью передачи в него третьего управляющего сигнала.
Пункт 19. Система управления полетом по пункту 18, в которой первый блок дистанционного электронного оборудования также выполнен с возможностью управления работой указанного привода на основании первого управляющего сигнала и третьего управляющего сигнала, когда второй электронной схеме управления приводом не удается передать достоверный второй управляющий сигнал,
причем третий управляющий сигнал передан посредством второго блока дистанционного электронного оборудования в первый блок дистанционного электронного оборудования.
Пункт 20. Система управления полетом по любому из пунктов 15-19, также содержащая альтернативную линию связи между первым блоком дистанционного электронного оборудования и вторым блоком дистанционного электронного оборудования, по которой возможна передача по меньшей мере части управляющего сигнала, поступающего от электронной схемы управления приводом.
В данном письменном описании использованы примеры для раскрытия различных вариантов реализации, включая наилучший вариант, а также для обеспечения специалистам в данной области техники возможности применения на практике различных вариантов реализации, включая изготовление и использование любых устройств или систем, а также выполнение любых включенных в данный документ способов. Патентоспособный объем настоящего изобретения определяется его формулой и может включать в себя другие примеры, которые могут возникнуть у специалиста в данной области техники. Такие другие примеры предназначены для включения в пределы объема формулы изобретения, если они имеют структурные элементы, которые не отличаются от буквального изложения в формуле изобретения, или если они включают эквивалентные структурные элементы с несущественными отличиями от буквального изложения в формуле изобретения.
Группа изобретений относится к системе управления полетом (варианты) и способу ее использования. Система по первому варианту содержит три электронных схемы управления приводом, два блока дистанционного электронного оборудования, соединенные со схемами управления определенным образом. Система управления по второму варианту содержит привод горизонтального стабилизатора, два блока дистанционного электронного оборудования, соединенных с приводом, выполненных с возможностью работать независимо друг от друга, по меньшей мере две электронные схемы управления. Для управления полетом для поверхности управления принимают управляющие сигналы в соответствующих блоках управления от соответствующих схем управления, на основании которых осуществляют управление работой привода. Обеспечивается повышение надежности системы управления за счет избыточности управления, а также взаимозаменяемости схем управления. 3 н. и 17 з.п. ф-лы, 5 ил.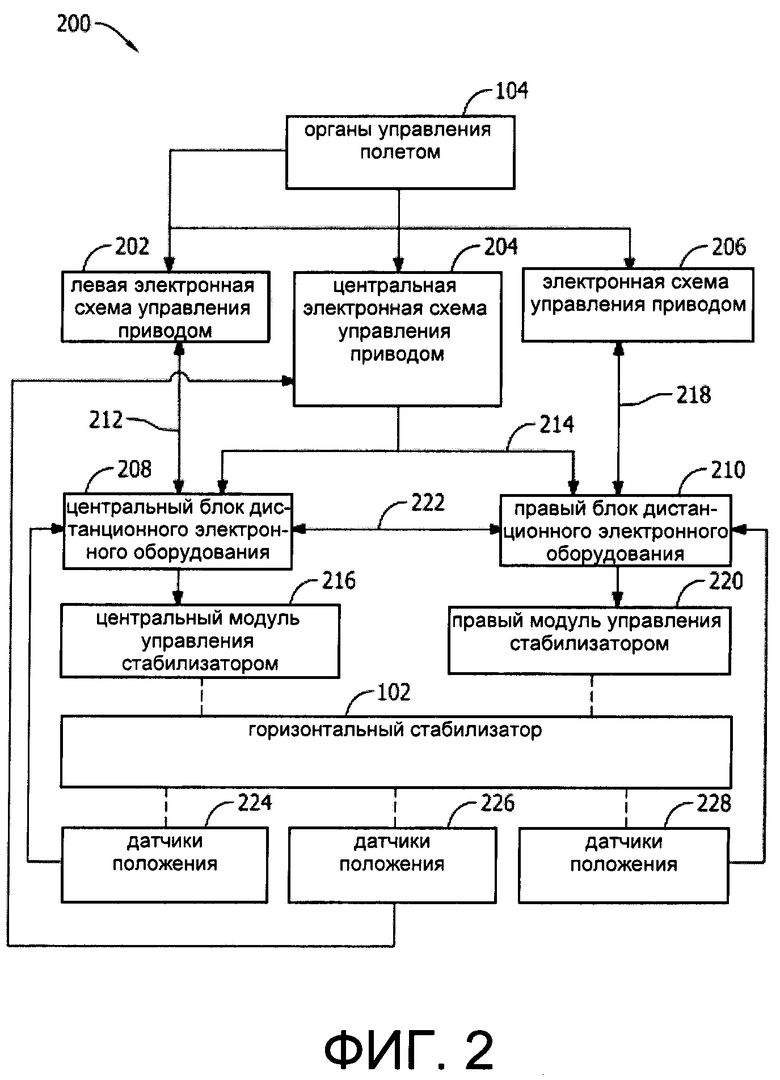
1. Система (100, 200) управления полетом для поверхности (102) управления полетом, содержащая:
первую электронную схему (202) управления приводом, выполненную с возможностью выработки первого управляющего сигнала для поверхности (102) управления полетом;
вторую электронную схему (204) управления приводом, выполненную с возможностью выработки второго управляющего сигнала для поверхности (102) управления полетом;
третью электронную схему (206) управления приводом, выполненную с возможностью выработки третьего управляющего сигнала для поверхности (102) управления полетом;
первый блок (208) дистанционного электронного оборудования, соединенный с первой электронной схемой (202) управления приводом и второй электронной схемой (204) управления приводом и выполненный с возможностью управления работой привода (216, 220), соединенного с поверхностью (102) управления полетом, на основании первого управляющего сигнала и второго управляющего сигнала; и
второй блок (210) дистанционного электронного оборудования, соединенный со второй электронной схемой (204) управления приводом и третьей электронной схемой (206) управления приводом и выполненный с возможностью управления работой привода (216, 220) на основании второго управляющего сигнала и третьего управляющего сигнала.
2. Система (100, 200) управления полетом по п. 1, в которой первая электронная схема (202) управления приводом, вторая электронная схема (204) управления приводом и третья электронная схема (206) управления приводом соответственно изолированы друг от друга и не имеют возможности обмениваться данными друг с другом.
3. Система (100, 200) управления полетом по любому из пп. 1, 2, в которой первый блок (208) дистанционного электронного оборудования также соединен со вторым блоком (210) дистанционного электронного оборудования альтернативным сигнальным трактом (222).
4. Система (100, 200) управления полетом по п. 3, в которой первый блок (208) дистанционного электронного оборудования также выполнен с возможностью передачи по меньшей мере части первого управляющего сигнала по альтернативному сигнальному тракту (222) во второй блок (210) дистанционного электронного оборудования.
5. Система (100, 200) управления полетом по п. 4, в которой первый блок (208) дистанционного электронного оборудования также выполнен с возможностью передачи по меньшей мере указанной части первого управляющего сигнала по альтернативному сигнальному тракту (222) во второй блок (210) дистанционного электронного оборудования, когда второй блок (210) дистанционного электронного оборудования не принимает второй управляющий сигнал от второй электронной схемы (204) управления приводом,
причем второй блок (210) дистанционного электронного оборудования также выполнен с возможностью управления работой привода (216, 220) на основании третьего управляющего сигнала и по меньшей мере указанной части первого управляющего сигнала, принятого по альтернативному сигнальному тракту (222).
6. Система (100, 200) управления полетом по любому из пп. 1, 2, в которой каждый из первого блока (208) дистанционного электронного оборудования и второго блока (210) дистанционного электронного оборудования также выполнен с возможностью управления работой привода (216, 220) только по приему соответствующих управляющих сигналов, поступающих по меньшей мере от двух из первой электронной схемы (202) управления приводом, второй электронной схемы (204) управления приводом и третьей электронной схемы (206) управления приводом.
7. Система (100, 200) управления полетом по п. 6, в которой каждый из первого блока (208) дистанционного электронного оборудования и второго блока (210) дистанционного электронного оборудования также выполнен с возможностью управления работой привода (216, 220) независимо друг от друга.
8. Способ (500) использования системы (100, 200) управления полетом для управления работой поверхности (102) управления полетом, включающий:
прием (510) в первом блоке (208) дистанционного электронного оборудования первого управляющего сигнала от первой электронной схемы (202) управления приводом для управления работой привода (216, 220), соединенного с поверхностью (102) управления полетом;
прием (520) во втором блоке (210) дистанционного электронного оборудования второго управляющего сигнала от второй электронной схемы (204) управления приводом для управления работой привода (216, 220);
передачу (530) второго управляющего сигнала из второго блока (210) дистанционного электронного оборудования в первый блок (208) дистанционного электронного оборудования и
управление работой (540) привода (216, 220) посредством первого блока (208) дистанционного электронного оборудования на основании первого управляющего сигнала и второго управляющего сигнала.
9. Способ (500) по п. 8, также включающий:
прием в первом блоке (208) дистанционного электронного оборудования и втором блоке (210) дистанционного электронного оборудования третьего управляющего сигнала от третьей электронной схемы (206) управления приводом и
управление работой привода (216, 220) посредством первого блока (208) дистанционного электронного оборудования на основании первого управляющего сигнала и третьего управляющего сигнала.
10. Способ (500) по п. 9, также включающий:
обнаружение во втором блоке (210) дистанционного электронного оборудования недостоверности третьего управляющего сигнала от третьей электронной схемы (206) управления приводом и
инициирование передачи второго управляющего сигнала из второго блока (210) дистанционного электронного оборудования в первый блок (208) дистанционного электронного оборудования в качестве реакции на указанное обнаружение.
11. Способ (500) по любому из пп. 9, 10, также включающий:
обнаружение во втором блоке (210) дистанционного электронного оборудования недостоверности второго управляющего сигнала от второй электронной схемы (204) управления приводом и
отключение второго блока (210) дистанционного электронного оборудования от управления работой привода (216, 220) в качестве реакции на указанное обнаружение.
12. Способ (500) по любому из пп. 8-10, также включающий:
выработку первого управляющего сигнала в первой электронной схеме (202) управления приводом и
выработку второго управляющего сигнала во второй электронной схеме (204) управления приводом независимо от первой электронной схемы (202) управления приводом.
13. Способ (500) по п. 12, также включающий прием в первой электронной схеме (202) управления приводом и второй электронной схеме (204) управления приводом входного сигнала управления от органов управления полетом,
причем первый управляющий сигнал и второй управляющий сигнал вырабатывают независимо на основании указанного входного сигнала управления.
14. Способ (500) по любому из пп. 8-10, также включающий:
прием в первом блоке (208) дистанционного электронного оборудования сигнала датчика, представляющего положение поверхности (102) управления полетом; и
передачу сигнала датчика во второй блок (210) дистанционного электронного оборудования.
15. Система (100, 200) управления полетом для горизонтального стабилизатора (102), содержащая:
привод (216, 220), соединенный с горизонтальным стабилизатором (102);
первый блок (208) дистанционного электронного оборудования, соединенный с приводом (216, 220) и выполненный с возможностью управления работой указанного привода (216, 220) на основании соответствующих управляющих сигналов, поступающих по меньшей мере от двух электронных схем (202, 204) управления приводом; и
второй блок (210) дистанционного электронного оборудования, соединенный с приводом (216, 220) и выполненный с возможностью управления работой указанного привода (216, 220) независимо от первого блока (208) дистанционного электронного оборудования на основании соответствующих управляющих сигналов, поступающих по меньшей мере от двух электронных схем (204, 206) управления приводом,
причем второй блок (210) дистанционного электронного оборудования также соединен с первым блоком (208) дистанционного электронного оборудования, а также выполнен с возможностью передачи управляющего сигнала, принятого от электронной схемы (202, 204, 206) управления приводом, в первый блок (208) дистанционного электронного оборудования.
16. Система (100, 200) управления полетом по п. 15, также содержащая датчик (224), соединенный с горизонтальным стабилизатором (102) и выполненный с возможностью обнаружения приведения его в действие и передачи сигнала датчика, представляющего указанное приведение в действие, в первый блок (208) дистанционного электронного оборудования,
причем первый блок (208) дистанционного электронного оборудования также выполнен с возможностью управления работой указанного привода (216, 220) на основании сигнала датчика.
17. Система (100, 200) управления полетом по п. 16, в которой первый блок (208) дистанционного электронного оборудования также выполнен с возможностью передачи сигнала датчика во второй блок (210) дистанционного электронного оборудования.
18. Система (100, 200) управления полетом по любому из пп. 15-17, также содержащая:
первую электронную схему (202) управления приводом, соединенную с первым блоком (208) дистанционного электронного оборудования и выполненную с возможностью передачи в него первого управляющего сигнала;
вторую электронную схему (204) управления приводом, соединенную с первым блоком (208) дистанционного электронного оборудования и вторым блоком (210) дистанционного электронного оборудования и выполненную с возможностью передачи второго управляющего сигнала как в первый блок (208) дистанционного электронного оборудования, так и второй блок (210) дистанционного электронного оборудования; и
третью электронную схему (206) управления приводом, соединенную со вторым блоком (210) дистанционного электронного оборудования и выполненную с возможностью передачи в него третьего управляющего сигнала.
19. Система (100, 200) управления полетом по п. 18, в которой первый блок (208) дистанционного электронного оборудования также выполнен с возможностью управления работой указанного привода (216, 220) на основании первого управляющего сигнала и третьего управляющего сигнала, когда второй электронной схеме (204) управления приводом не удается передать достоверный второй управляющий сигнал,
причем третий управляющий сигнал передан посредством второго блока (210) дистанционного электронного оборудования в первый блок (208) дистанционного электронного оборудования.
20. Система (100, 200) управления полетом по любому из пп. 15-17, также содержащая альтернативную линию (222) связи между первым блоком (208) дистанционного электронного оборудования и вторым блоком (210) дистанционного электронного оборудования, по которой возможна передача по меньшей мере части управляющего сигнала, поступающего от электронной схемы (202, 204, 206) управления приводом.
| ОДНОВИБРАТОР | 0 |
|
SU288034A1 |
| DE 102011115318 A1, 11.04.2013 | |||
| US 8690101 B2, 08.04.2014 | |||
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| RU 2015152034 A, 07.06.2017. | |||

