Изобретение относится к сельскому хозяйству, в частности к устройствам для дифференцированного внесения жидких средств химизации летательными аппаратами в системе точного земледелия.
Известно устройство для опрыскивания с вертолета сельскохозяйственных и лесных угодий средствами защиты растений, включающее бак для рабочих растворов пестицидов, насосный агрегат, гидравлический клапан, трубопроводы, соединяющие насосный агрегат последовательно с клапаном и штангой с распылителями длиной, составляющей 0,3-0,35 диаметра несущего винта вертолета, прикрепленную к вертолету с помощью кронштейна, при этом в средней части штанги распылители размещены в два ряда в шахматном порядке с углом между осями распылителей в первом и втором ряду не менее 40° (Патент RU 1586042).
Недостатком такой конструкции опрыскивателя, установленного на вертолете, является то, что средства защиты растений вносятся на всей площади обрабатываемого сельскохозяйственного поля и лесных насаждений по усредненным количественным показателям, в то время как на свободных от сорных растений, вредителей и болезней участках их внесение не требуется или требуется внесение с меньшими нормами, что приводит к излишнему расходу средств защиты растений на единицу обрабатываемой площади, повышенной экотоксикологической нагрузке на окружающую среду и снижению производительности авиахимработ. Кроме этого, конструкция такого устройства позволяет вносить только один вид пестицида с нерегулируемой нормой, хотя зачастую при обработке сельскохозяйственных и лесных угодий требуется внесение с разными нормами гербицидов, инсектицидов и фунгицидов.
В соответствии с Федеральными авиационными правилами «Подготовка и выполнение полетов в гражданской авиации» (Приказ Министра РФ от 31.07.2009 №128) полеты при обработке участков (полей, садов, виноградников) в равнинной местности должны выполняться на высоте не ниже 5 м, а над верхушками отдельных деревьев леса - не ниже 10 м. Такая высота полета и, соответственно, высота обработки агроценозов и плодовых деревьев в 10-20 раз больше высоты обработки растений пестицидами наземной техникой, что приводит к испарению рабочей жидкости в процессе оседания капель, сносу диспергируемых капель за пределы обрабатываемого участка поля и, как следствие, к потерям пестицидов, загрязнению ими окружающей среды выше предельно-допустимых концентраций.
Известны способ авиационного нанесения жидких, порошкообразных и других веществ (Патент RU 2272754), минимизирующий снос рабочих веществ за пределы обрабатываемого участка при соблюдении безопасной высоты полета, и устройство для его осуществления, наиболее близкое по своей технической сущности к заявляемому устройству, содержащее базовый вертолет с пультом управления и емкостью для рабочих веществ, беспилотный летательный аппарат (БПЛА), снабженный двигателем, распределяющими устройствами и связанный с вертолетом гибкой связью с линией подвода энергопитания и трубопроводом для подачи рабочего наносимого раствора вещества к распределяющим устройствам.
Недостаток данного комплекса летательных аппаратов, состоящего из вертолета и БПЛА, заключается в отсутствие устройства, обеспечивающего дифференцированное внесение по площади сельскохозяйственного поля, садовых, лесных насаждений как одного пестицида и однокомпонентного минерального удобрения, так и нескольких пестицидов и различных видов минеральных удобрений одновременно на основе электронных цифровых карт-заданий, отображающих нормы внесения пестицидов и дозы минеральных удобрений на каждом выделенном элементарном участке с пространственно привязанными координатами с помощью глобальной спутниковой навигационной системы.
В этой связи выявленные недостатки известных устройств не позволяют применять их в системе точного земледелия и осуществлять дифференцированное внесение жидких средств химизации (ЖСХ), что снижает эффективность их применения и качество внесения, приводит к загрязнению окружающей среды.
Технической задачей изобретения является создание комплекса летательных аппаратов для дифференцированного внесения жидких средств химизации (ЖСХ), повышающего эффективность и качество обработки сельскохозяйственных и лесных угодий, снижение расхода средств химизации, уменьшение их вредного воздействия на окружающую среду.
Поставленная техническая задача достигается тем, что в комплексе летательных аппаратов для дифференцированного внесения жидких средств химизации, содержащем базовый вертолет с пультом управления, бортовым компьютером, приемником сигналов глобальной спутниковой навигационной системы, блоком подачи и распределения жидких средств химизации с гидрорезервуарами, насосами, трубопроводами и трубопроводной арматурой, связанный гибкой связью с закрепленными на ней электрокабелем и трубопроводами с беспилотным летательным аппаратом, включающим приемник сигналов глобальной спутниковой навигационной системы, бортовой компьютер, штангу с форсунками, согласно изобретению беспилотный летательный аппарат выполнен в виде летательного аппарата вертолетного типа со штангой с форсунками, при этом штанга, длина которой более 0,35 диаметра несущего винта базового вертолета, выполнена в виде горизонтально расположенного внешнего полого эллиптического цилиндра с продольной осью, перпендикулярной продольной оси беспилотного летательного аппарата, и большой осью эллипса, лежащей в горизонтальной плоскости, параллельной обрабатываемой поверхности, причем внутри внешнего эллиптического цилиндра размещено по меньшей мере два коаксиально расположенных полых эллиптических цилиндра, с большими осями эллипсов, совпадающими с большей осью внешнего эллиптического цилиндра, в каждой полости которых предусмотрен подвод и запитка жидких средств химизации по меньшей мере от одного из не менее чем трех соединенных между собой гидрорезервуаров на базовом вертолете, каждый из гидрорезервуаров соединен по меньшей мере с одним из не менее чем трех дозаторов цифрового типа, размещенных на беспилотном летательном аппарате, причем каждый эллиптический цилиндр соединен с форсунками, установленными по образующей внешнего эллиптического цилиндра с углом 0≤α≤30° между соседними осями форсунок в проекции на вертикальную плоскость и вдоль внешнего эллиптического цилиндра штанги с шагом, обеспечивающим не менее чем двойное перекрытие соседних факелов распыла форсунок на рабочей высоте полета беспилотного летательного аппарата.
Изобретение поясняется чертежами.
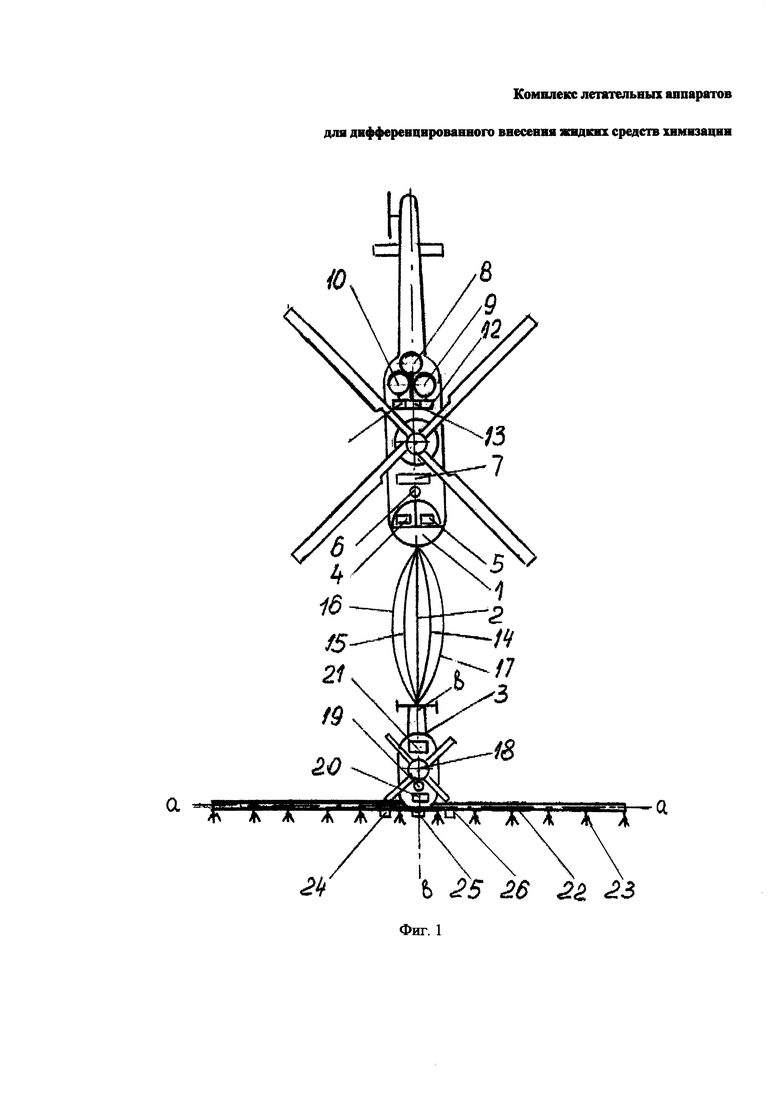
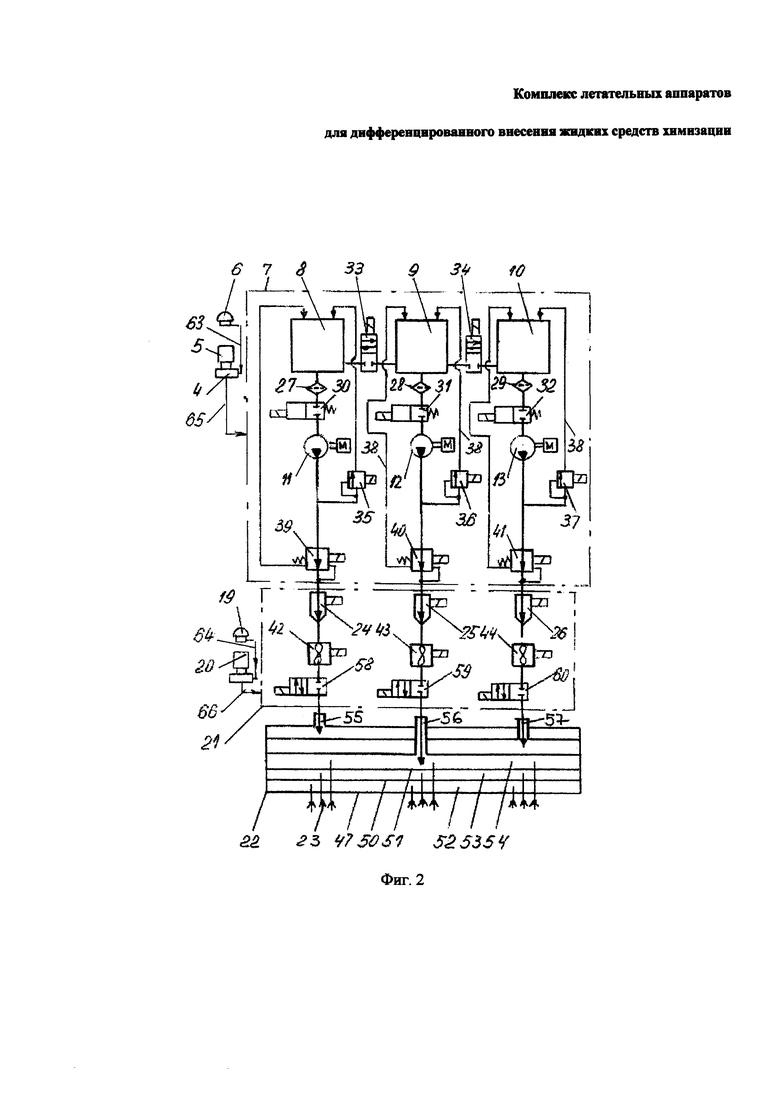
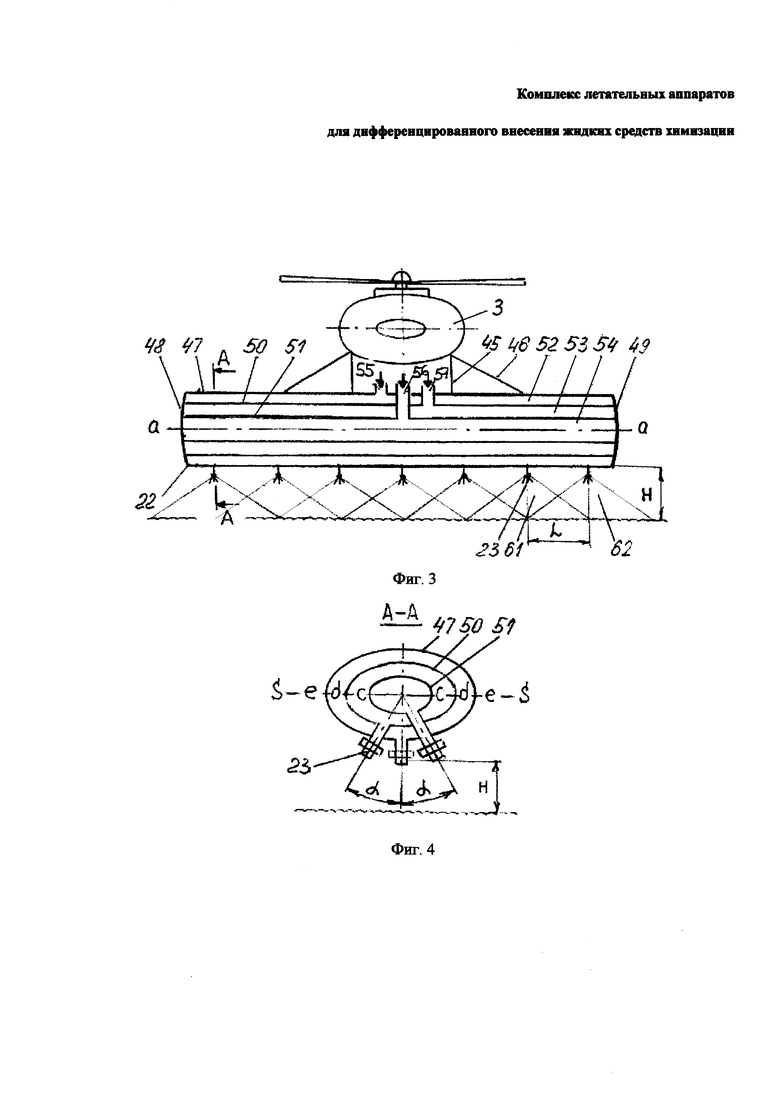
На фиг. 1 - вид сверху комплекса летательных аппаратов; на фиг. 2 - принципиальная технологическая схема оборудования для обеспечения дифференцированного внесения жидких средств химизации; на фиг. 3 - схема продольного разреза штанги для диспергирования; на фиг. 4 - схема поперечного разреза штанги для диспергирования.
Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации включает базовый вертолет 1 и соединенный с ним гибкой связью 2 беспилотный летательный аппарат 3 вертолетного типа. Базовый вертолет 1 содержит пульт управления 4, бортовой компьютер 5, приемник сигналов 6 глобальной спутниковой навигационной системы (ГЛОНАСС/GPS), блок 7 подачи и распределения жидких средств химизации с гидрорезервуарами 8, 9, 10, соединенными гидротрубопроводами и трубопроводной арматурой между собой и с насосами 11, 12, 13.
На гибкой связи 2 закреплены гибкие трубопроводы 14, 15, 16 для подачи ЖСХ к БПЛА 3 и электрокабель 17 для подачи электропитания к двигателю 18 БПЛА 3.
БПЛА 3 содержит приемник 19 сигналов ГЛОНАСС/GPS, бортовой компьютер 20, блок 21 дозирования и распределения жидких средств химизации, включающий цилиндрическую штангу 22 с форсунками 23 длиной более 0,35 - диаметра (D) несущего винта вертолета 1, цифровые дозаторы 24, 25, 26.
Трубопроводная арматура блока 7 включает фильтры 27, 28, 29, отсечные нормально закрытые клапаны 30, 31, 32, 33, 34 с электромагнитным управлением, переливные клапаны 35, 36, 37, байбасные гидролинии 38, пропорциональные регулирующие клапаны 39, 40,41, расходомеры 42, 43, 44.
Штанга 22 с форсунками 23 закреплена посредством кронштейнов 45, 46 к фюзеляжу БПЛА 3 в носовой нижней его части.
Штанга 22 выполнена в виде горизонтально расположенного с продольной осью а-а, перпендикулярной продольной оси b-b БПЛА 3 внешнего эллиптического полого цилиндра 47, с торцевыми эллиптическими заглушками 48, 49, внутри эллиптического цилиндра которого коаксиально размещены полые эллиптические цилиндры 50 и 51.
Внутренние и внешние стороны эллиптических цилиндров 47 и 50, 50 и 51 образуют кольцевые полости 52, 53. Эллиптический цилиндр 51 имеет собственную полость 54. Большие оси эллипсов с-с, d-d, е-е, эллиптических цилиндров 47, 50, 51, лежат в одной горизонтальной плоскости s-s, параллельной обрабатываемой поверхности поля S. Каждый эллиптический цилиндр 47, 50, 51 имеет соответствующий подвод 55, 56, 57 для ЖСХ. При этом каждая полость 52, 53, 54 эллиптических цилиндров 47, 50, 51 может заполняться от своего гидрорезервуара 8, 9, 10, соответственно и от всех гидрорезервуаров при открытых клапанах 33 и 34. Каждая из полостей 52, 53, 54 эллиптических цилиндров 47, 50, 51 соединена с соответствующим запорным электромагнитным клапаном 58, 59, 60, закрепленных на штанге 22 БПЛА 3, и с соответствующими дозаторами цифрового типа 24, 25, 26, размещенными на БПЛА 3. Каждый из цилиндров 47, 50, 51 снабжен форсунками 23, установленными по образующей внешнего эллиптического цилиндра 47 с углом α между соседними осями форсунок в проекции на плоскость, не превышающим 30°. Форсунки 23 размещены вдоль внешнего эллиптического цилиндра 47 штанги 22 с шагом  , обеспечивающим не менее чем двойное перекрытие L соседних факелов распыла 61 и 62 на рабочей высоте H полета БПЛА 3. Приемники 6 и 19 сигналов ГЛОНАСС/GPS связаны интерфейсами 63 и 64 с компьютерами 5 и 20 вертолета 1 и БПЛА 3 соответственно, а компьютеры 5 и 20 связаны интерфейсами 65 и 66 с блоками 7 и 21 соответственно вертолета 1 и БПЛА 3.
, обеспечивающим не менее чем двойное перекрытие L соседних факелов распыла 61 и 62 на рабочей высоте H полета БПЛА 3. Приемники 6 и 19 сигналов ГЛОНАСС/GPS связаны интерфейсами 63 и 64 с компьютерами 5 и 20 вертолета 1 и БПЛА 3 соответственно, а компьютеры 5 и 20 связаны интерфейсами 65 и 66 с блоками 7 и 21 соответственно вертолета 1 и БПЛА 3.
Выполнение БПЛА 3 в виде летательного аппарата вертолетного типа на гибкой связи 2 с вертолетом 1 обеспечивает его синхронные взлет, полет и посадку с вертолетом 1, что повышает эффективность и качество дифференцированного внесения ЖСХ.
Выполнение штанги 22 БПЛА 3 длиной более 0,35 - диаметра (D) несущего винта вертолета увеличивает производительность внесения ЖСХ и, как следствие, экономическую эффективность обработки сельскохозяйственных и лесных угодий данным комплексом летательных аппаратов по сравнению с известными устройствами для авиационно-химических работ.
Выполнение штанги 22 БПЛА 3 в виде горизонтального расположенного эллиптического цилиндра 47 с продольной осью а-а, перпендикулярной продольной оси b-b БПЛА 3, и большей осью эллипса е-е, лежащей в горизонтальной плоскости s-s, параллельной обрабатываемой поверхности S, снижает турбулизацию воздуха и уменьшает ветрообразование за штангой 22 БПЛА 3, что уменьшает влияние турбулентности на диспергирование ЖСХ, уменьшает их снос и повышает качество нанесения ЖСХ на растения.
Выполнение внутри эллиптического цилиндра 47 по меньшей мере двух коаксильно расположенных полых эллиптических цилиндров 50, 51 с большими осями d-d и с-с эллипсов, совпадающими с большей осью е-е внешнего эллиптического цилиндра 47 с подводом и запиткой ЖСХ по крайней мере от одного из не менее чем трех гидрорезервуаров 8, 9, 10, и соединенных по меньшей мере одним из не менее трех дозаторов 24, 25, 26, установленных на БПЛА 3, обеспечивает подачу в полости 52, 53, 54 эллиптических цилиндров 47, 50, 51 для дальнейшего диспергирования не менее трех видов минеральных удобрений, отличающихся по действующему веществу, не менее трех групп пестицидов или совместное внесение пестицидов и минеральных удобрений. Такая конструкция штанги 22 БПЛА 3 и взаимосвязь ее элементов обеспечивают дифференцированную подачу в соответствующие полости 52, 53 и 54 соответствующего ЖСХ и последующее дифференцированное внесение.
Размещение на БПЛА 3 не менее чем трех дозаторов цифрового типа 24, 25, 26 позволяет изменять дозы и нормы внесения ЖСХ по управляющим сигналам от бортового компьютера 20 в соответствии с электронной картой-заданием на дифференцированное внесение ЖСХ.
Установка форсунок 23 по образующей внешнего эллиптического цилиндра 47 штанги 22 с углом 0≤α≥30° между соседними осями форсунок в проекции на вертикальную плоскость с шагом расстановки вдоль внешнего эллиптического цилиндра, не менее чем двойное перекрытие L соседних факелов распыла на рабочей высоте H полета БПЛА 3 обеспечивает равномерное распределение ЖСХ на рабочей ширине внесения и по всей обрабатываемой площади в пределах нормативных требований.
Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации работает следующим образом.
Предварительно разрабатываются цифровая карта-задание, включающая координаты участков засоренности поля сорными растениями, вредителями и болезнями и нормы внесения гербицидов, инсектицидов и фунгицидов или карта-задание с координатами выделенных участков поля, требующих внесение заданных доз различных по содержанию питательных веществ минеральных удобрений или цифровая карта-задание, отображающая координаты участков, дозы азотного удобрения и нормы пестицидов при одновременной дифференцированной подкормке растений и защите от вредителей и болезней.
При этом карта-задание отображает прямоугольные участки поля шириной, равной длине штанги 22 БПЛА 3, и длиной, функционально характеризующей постоянство дозы и нормы на этом участке.
Электронная карта-задание перед началом полета вводится в бортовой компьютер 5 вертолета 1 и в бортовой компьютер 20 БПЛА 3. В соответствии с электронной картой-заданием гидрорезервуары 8, 9, 10 заполняются соответствующими жидкими средствами химизации. Запускаются с помощью пульта 4 двигатель вертолета 1 и двигатель 18 БПЛА 3.
После взлета комплекса летательных аппаратов он подлетает к обрабатываемому участку поля и при достижении штангой 22 БПЛА 3 координат начала обработки сельскохозяйственного поля, определяемых по навигационным приемникам 6 и 19, от бортового компьютера 5 вертолета 1 и бортового компьютера 20 БПЛА 3 подаются по интерфейсам 65 и 66 управляющие сигналы в блок 7 вертолета 1 и блок 21 БПЛА 3 соответственно. Открываются клапаны 30, 31, 32. Включаются в работу насосы 11, 12, 13.
Из баков 8, 9, 10 ЖСХ через фильтры 27, 28, 29 подаются насосами 11, 12, 13 к клапанам 39, 40, 41, которые поддерживают выходные значения перепада рабочего давления на заданном уровне или меняют выходные значения давления по заданной программе по сигналу от компьютера 5; при этом часть ЖСХ по гидролиниям 38 байпасируется в баки 8, 9, 10 посредством переливных клапанов 35, 36, 37 для обеспечения заданного рабочего напора на выходе из насосов 11, 12, 13. От клапанов 39, 40, 41 ЖСХ по трубопроводам 14, 15, 16 поступают к установленным на БПЛА 3 пропорциональным дозаторам 24, 25, 26, которые в процессе полета комплекса летательных аппаратов в автоматическом режиме изменяют по заданной программе и стабилизируют расход ЖСХ, поступающих от дозаторов 24, 25, 26 в соответствующие полости 52, 53, 54 эллиптических цилиндров 47, 50, 51, и далее ЖСХ посредством форсунок 23 диспергируются на участки агроценозов или лесных насаждений.
При работе и перелете комплекса летательных аппаратов с одного участка обрабатываемого поля на другой, отличающегося по нормам и дозам внесения ЖСХ, а также по содержанию питательных веществ минеральных удобрений и группам пестицидов, приемник 6 вертолета 1 и приемник 19 БПЛА 3 отслеживают и передают значения пространственных координат местоположения комплекса летательных аппаратов в компьютер 5 вертолета 1 и компьютер 20 БПЛА 3, которые идентифицируют координаты, полученные от ГЛОНАСС/GPS приемников, с координатами, заданными на электронной карте-задании обработки поля и в соответствии с ней дают управляющие сигналы в блок 7 вертолета 1 и блок 21 БПЛА 3 для осуществления процесса дифференцированного распределения и внесения заданных видов и норм пестицидов и доз минеральных удобрений, требующихся для данного участка сельскохозяйственного поля. Такой процесс осуществляется при каждом перелете комплекса летательных аппаратов с одного участка сельскохозяйственных и лесных угодий на другой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| АВТОЖИР ДЛЯ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ СРЕДСТВ ХИМИЗАЦИИ | 2014 |
|
RU2589801C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Способ внесения сыпучих средств защиты растений и комплекс для его осуществления | 2018 |
|
RU2694502C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
Изобретение относится к сельскому хозяйству, в частности к устройствам для дифференцированного внесения жидких средств химизации летательными аппаратами в системе точного земледелия. Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации содержит базовый вертолет (1) с пультом управления (4), бортовым компьютером (5), приемником сигналов (6) глобальной спутниковой навигационной системы, блоком подачи и распределения жидких средств химизации (ЖСХ) с гидрорезервуарами (8, 9, 10), насосами (11, 12, 13), трубопроводами и трубопроводной арматурой. Базовый вертолет связан гибкой связью (2) с электрокабелем (17) и трубопроводами (14, 15, 16) с беспилотным летательным аппаратом (3) вертолетного типа, включающим приемник сигналов (19), бортовой компьютер (20), штангу (22) с форсунками (23). Штанга выполнена длиной более 0,35 диаметра несущего винта базового вертолета (1) в виде горизонтально расположенного внешнего полого эллиптического цилиндра (47) с большой осью эллипса, лежащей в горизонтальной плоскости, параллельной обрабатываемой поверхности, внутри которого расположены два полых эллиптических цилиндра (50, 51). Повышается эффективность и качество обработки растений. 4 ил.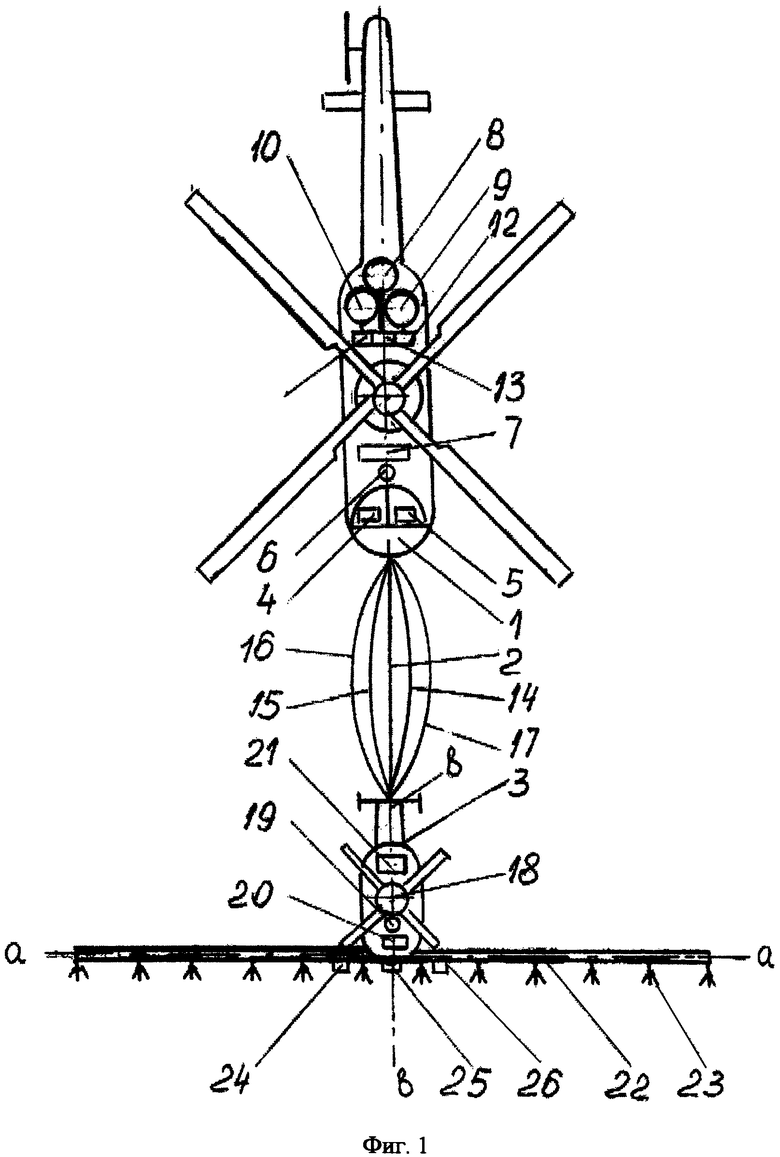
Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации, содержащий базовый вертолет с пультом управления, бортовым компьютером, приемником сигналов глобальной спутниковой навигационной системы, блоком подачи и распределения жидких средств химизации с гидрорезервуарами, насосами, трубопроводами и трубопроводной арматурой, связанный гибкой связью с закрепленными на ней электрокабелем и трубопроводами с беспилотным летательным аппаратом, включающим приемник сигналов глобальной спутниковой навигационной системы, бортовой компьютер и штангу с форсунками, отличающийся тем, что беспилотный летательный аппарат выполнен в виде летательного аппарата вертолетного типа со штангой с форсунками, при этом штанга, длина которой более 0,35 диаметра несущего винта базового вертолета, выполнена в виде горизонтально расположенного внешнего полого эллиптического цилиндра с продольной осью, перпендикулярной продольной оси беспилотного летательного аппарата, и большой осью эллипса, лежащей в горизонтальной плоскости параллельной обрабатываемой поверхности, причем внутри внешнего эллиптического цилиндра размещено по меньшей мере два коаксиально расположенных полых эллиптических цилиндра, с большими осями эллипсов, совпадающими с большей осью внешнего эллиптического цилиндра, в каждой полости которых предусмотрен подвод и запитка жидких средств химизации по меньшей мере от одного из не менее чем трех соединенных между собой гидрорезервуаров на базовом вертолете, каждый из гидрорезервуаров соединен по меньшей мере с одним из не менее чем трех дозаторов цифрового типа, размещенных на беспилотном летательном аппарате, причем каждый эллиптический цилиндр соединен с форсунками, установленными по образующей внешнего эллиптического цилиндра с углом 0≤α≤30° между соседними осями форсунок в проекции на вертикальную плоскость и вдоль внешнего эллиптического цилиндра штанги с шагом, обеспечивающим не менее чем двойное перекрытие соседних факелов распыла форсунок на рабочей высоте полета беспилотного летательного аппарата.
| СПОСОБ АВИАЦИОННОГО НАНЕСЕНИЯ ЖИДКИХ, ПОРОШКООБРАЗНЫХ И ДРУГИХ ВЕЩЕСТВ | 2004 |
|
RU2272754C2 |
| ПОДВЕСНОЙ ОПРЫСКИВАТЕЛЬ К ВЕРТОЛЕТУ | 1983 |
|
RU1136403C |
| WO 2010145006 A1, 23.12.2010 | |||
| АГРЕГАТ ДЛЯ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ | 2005 |
|
RU2286040C2 |

