Изобретение относится к области робототехники, а именно к способам построения маршрута движения и предотвращения столкновений с препятствиями мобильного сервисного робота (далее также «робота»), осуществляющего технологические функции на коммерческих объектах, в частности, операции, связанные с инвентаризацией.
Известен автономный мобильный робот, включающий в себя базу робота, бортовую навигационную систему и способ его движения (патент US № 9592609 от 25.01.2013) в физической среде со стационарными и нестационарными препятствиями, причем способ включает:
a) сохранение на базе робота глобальной карты, определяющей план помещения с набор рабочих мест;
b) получение роботом от базы задания, включающего в себя указанное местоположение задания, связанное с картой с указанным набором операций;
c) активация бортовой навигационной системы для автоматического
(i) определения местоположения робота на основе глобальной карты;
(ii) построение локальной траектории в двухкоординатной системе с использованием сенсоров и дальнейшее уточнение локальной траектории;
(iii) нахождение кратчайшего пути с использованием локальной траектории на карте с сеткой и перемещение мобильного робота из текущего положения мобильного робота в целевую точку на плане помещения путем движения мобильного робота с заданной линейной и угловой скоростями по первому пути, если движение мобильного робота по первому пути может привести к столкновению со стационарными или нестационарными препятствиями, то автоматически создается второй путь от текущего положения мобильного робота до положения на плане помещения в соответствии с локальной траекторией, с учетом предотвращения столкновений;
(iv) подача команд на движение с указанием линейной и угловой скоростей и приведение мобильного робота с использованием второго пути в фактическое местоположение;
d) выполнение роботом задания в виде набора операций, связанных с указанным местоположением задания на карте.
Недостатком данного способа является то, что при построении и перестроении маршрута движения учитываются только начальная и конечная точки маршрута, а промежуточные точки маршрута не являются обязательными для прохождения. Так же при прогнозировании возможного столкновения робота со стационарным или нестационарным препятствием, не учитываются физические размеры робота, а при обнаружении препятствия сенсорами робота во время движения робота не учитывается возможность столкновения с препятствием после подачи команды на остановку робота.
Известны устройство и способ для планирования пути мобильного робота (патент US № 10369695 от 28.04.2015). Устройство содержит: блок распознавания препятствия, расположенного между начальной точкой и целевой точкой мобильного робота, для определения узлов на основе сетки; блок планирования пути, выбирающий узлы на основе сетки, для развертывания дерева планирования пути для управления движением мобильного робота.
Способ планирования пути мобильного робота по п.1, в котором модуль планирования пути выполняет выборку узлов на основе сетки путем случайного извлечения случайного узла из набора узлов в сетке.Способ планирования пути мобильного робота по п.1, в котором модуль планирования пути выполняет расширение дерева планирования используя алгоритм быстрого исследования случайного дерева (RRT).
Способ планирования пути мобильного робота по п.1, в котором модуль планирования пути сравнивает первую функцию, которая включает расчета дистанции из выбранного до целевого узла и вектор направления со второй функцией, которая включает расчет дистанции из текущего положения робота до целевой точки и вектор направления.
Способ планирования пути мобильного робота по п.5, в котором в результате сравнивается первая функция вычисления пути со второй функцией вычисления пути, блок планирования пути не добавляет выбранный узел к дереву планирования пути, когда значение первой функция вычисления пути больше, чем значение второй функции вычисления пути, и добавляет выбранный узел к дереву пути, когда значение первой функции вычисления пути меньше значения второй функции вычисления пути.
Способ планирования пути мобильного робота по п.1, в котором блок распознавания устанавливает узлы на основе сетки с учетом кинематических характеристик мобильного робота.
Способ планирования пути мобильного робота по п. 8, в котором блок планирования пути выполняет выборку узлов на основе сетки без учета кинематических характеристик мобильного робота.
Способ построения пути мобильного робота включает установку начальной точки и целевой точки в области движения мобильного робота на основе карты захвата, распознавание препятствий, расположенного между начальной точкой и целевой точкой мобильного робота для настройки сетки целевых точек и выбор узлов на основе расширения дерева планирования пути для управления движением мобильного робота.
Способ планирования пути мобильного робота по п. 11, в котором при настройке узлов на основе сетки узлы устанавливаются как промежуточные точки, которые являются точками поворота, определенными между начальной и целевой точкой на основе карты.
Способ планирования пути мобильного робота по п. 11, в котором при установке узлов на основе сетки узлы устанавливаются с учетом кинематических характеристик мобильного робота.
При данном способе планирования пути кинематические характеристики мобильного робота включают в себя, по меньшей мере, один из следующих видов информации: информацию о перемещении мобильного робота или информацию о перемещении мобильного робота. Расширение дерева планирования пути и выбор узла на основе сетки выполняются случайного включения любого узла из узлов на основе сетки и повторяются до тех пор, пока выбранный узел не станет узлом, соответствующей точке, возможно использованием алгоритма быстрого исследования случайного дерева (RRT).
Недостатком данного способа является то, что при обнаружении сенсорами робота во время движения робота препятствия не учитывается возможность столкновения с препятствием после подачи команды на остановку робота, а отсутствие модуля траекторного регулятора ухудшает точность движения робота по заданной траектории.
Известны система и способ навигации робота по целевой траектории с обходом препятствий (патент US № 10429847 от 01.10.2019), в которой динамическими препятствиями являются другие движущиеся роботы.
Система для навигации робота по траектории к цели с обходом препятствий обеспечивает приемопередатчик, процессор и устройство хранения данных для инструкций, для исполнения процессором вычислений, для достижения цели, пути определения к цели, получение карты препятствий, координат положения робота, получение положений одного или нескольких других роботов, как динамических препятствий для робота, генерирование набора скоростей робота; оценка первого набора скоростей робота с использованием функций; выбор предпочтительной скорости робота; создание набора скоростей препятствий.
Способ навигации робота по задачам траектории с обходом препятствий включает: получение цели для робота, определение траектории, получение карты препятствий, получение положения робота, генерирование набора скорости для робота, оценку, с использованием функций, набора скоростей, выбор предпочтения скорости робота. Основные функции, определение и характеристики динамических препятствий на основе положения робота и предпочтительной скорости робота; перемещение робота на основе предпочтительной скорости.
Способ по п. 1, в котором поза первого робота определяется одним или несколькими из следующих способов: согласование сканирования с множественным разрешением (M3RSM) «многие-ко-многим», адаптивная локализация Монте-Карло (AMCL), система глобального позиционирования (GPS), опорная информация и одометрия на основе датчиков роботов.
Недостатком данного способа является пониженная точность задания параметров движения робота по заданной траектории в динамическом окружении.
Известен способ смешанного планирования пути, применяемый для управления движением мобильных роботов в помещениях, с использованием динамического окна и оптимального метода взаимного предотвращения столкновений в динамической среде (патент CN № 109945873 от 22.09.2017, прототип способа).
Способ смешанного планирования пути сочетается со способом глобального планирования пути в статической среде и способом локального планирования пути. Способ смешанного планирования пути используется для подачи информации о внешней среде в систему через внешний датчик для построения сеточной модели. Изобретение раскрывает способ смешанного планирования пути с объединением параллельного двунаправленного алгоритма A-star и улучшенного алгоритма искусственного потенциального поля; параллельный двунаправленный алгоритм A-star используется для поиска глобальных и статических путей; улучшенный алгоритм искусственного потенциального поля (APF) используется для поиска локальных и динамических путей.
Использование вышеперечисленных способов при управлении движением робота предполагает:
- получение маршрута от программного модуля формирования маршрута движения;
- получение признака «потенциальное столкновение» от программного модуля предотвращения столкновений;
- получение координат местонахождения робота от программного модуля формирования глобальной карты помещения;
- установление начальной точки и целевой точки движения робота;
- предварительное указание расположения препятствий на карте;
- поиск и получение точек оптимального маршрута движения без столкновений от текущей позиции до целевой с использованием алгоритма планирования пути;
- построение локальной траектории без столкновений, и извлечение ряда локальных целевых точек, относительно начальной точки, точек поворота и целевой точки;
- построение части локальной траектории и обновление информации о локальной траектории с использованием результатов сканирования сенсорами робота в режиме реального времени;
- запуск процесса управления движением робота при локальном планировании пути, чтение информации с локальной траектории, предоставленной потоком информации от модуля построения локальной траектории в режиме реального времени, использование локальной целевой точки в качестве текущей целевой точки с использованием алгоритма планирования пути для реализации движения по локальной траектории без столкновений с объездом статических и динамических препятствий.
Недостатком данного способа является пониженная точность задания параметров движения робота по заданной траектории в динамическом окружении.
Техническая задача, решаемая изобретением, - повышение точности движения мобильного робота по заданной траектории в динамическом окружении.
Техническая задача решена в способе управления движением мобильного сервисного робота, состоящего из подвижной платформы, электродвигателей колес с контроллером, сенсоров, контроллера сенсоров, блока человеко-машинного интерфейса, блока коммуникаций и сервисного устройства, системы управления, имеющей:
- компьютер, размещенный на подвижной платформе мобильного сервисного робота, сконфигурированный для управления движением;
- программный модуль, который управляет подвижной платформой и обеспечивает:
- объезд препятствий, обнаружение препятствия и получении данных от сенсоров в виде двухмерного облака точек обнаруженных препятствий и контура мобильного сервисного робота, программным модулем предотвращения столкновений выполняются следующие действия (вычисления):
- - вычисление безопасного расстояния  до препятствия в состоянии движения мобильного сервисного робота с учетом предварительной команды управления движением мобильного сервисного робота:
до препятствия в состоянии движения мобильного сервисного робота с учетом предварительной команды управления движением мобильного сервисного робота:
 ,
,
где  – безопасное расстояние до препятствия в состоянии движения мобильного сервисного робота,
– безопасное расстояние до препятствия в состоянии движения мобильного сервисного робота,
 – безопасное расстояние до препятствия в состоянии покоя мобильного сервисного робота,
– безопасное расстояние до препятствия в состоянии покоя мобильного сервисного робота,
 – линейная скорость мобильного сервисного робота;
– линейная скорость мобильного сервисного робота;
 – линейное ускорение мобильного сервисного робота;
– линейное ускорение мобильного сервисного робота;
 – ожидаемый тормозной путь мобильного сервисного робота;
– ожидаемый тормозной путь мобильного сервисного робота;
- вычисление программой координат  ,
,  ,
,  n-ых экстраполированных позиций мобильного сервисного робота:
n-ых экстраполированных позиций мобильного сервисного робота:
 ,
,  ,
,  ,
,
где , – координаты экстраполированной позиции мобильного сервисного робота;
– угол направления движения мобильного сервисного робота в экстраполированной позиции;
 – номер экстраполированной позиции мобильного сервисного робота;
– номер экстраполированной позиции мобильного сервисного робота;
 – шаг экстраполяции по времени;
– шаг экстраполяции по времени;
- выдача команды на перемещение проекции формы мобильного сервисного робота в экстраполированную позицию;
- последующее определение наличия пересечения проекцией формы мобильного сервисного робота двухмерного облака точек препятствия.
Данная совокупность отличительных признаков способа управления движением мобильного сервисного робота не найдена в процессе патентно-информационного поиска, следовательно, изобретение соответствует критерию «новизна». Она также не следует явно из уровня техники, следовательно, изобретение соответствует критерию «изобретательский уровень».
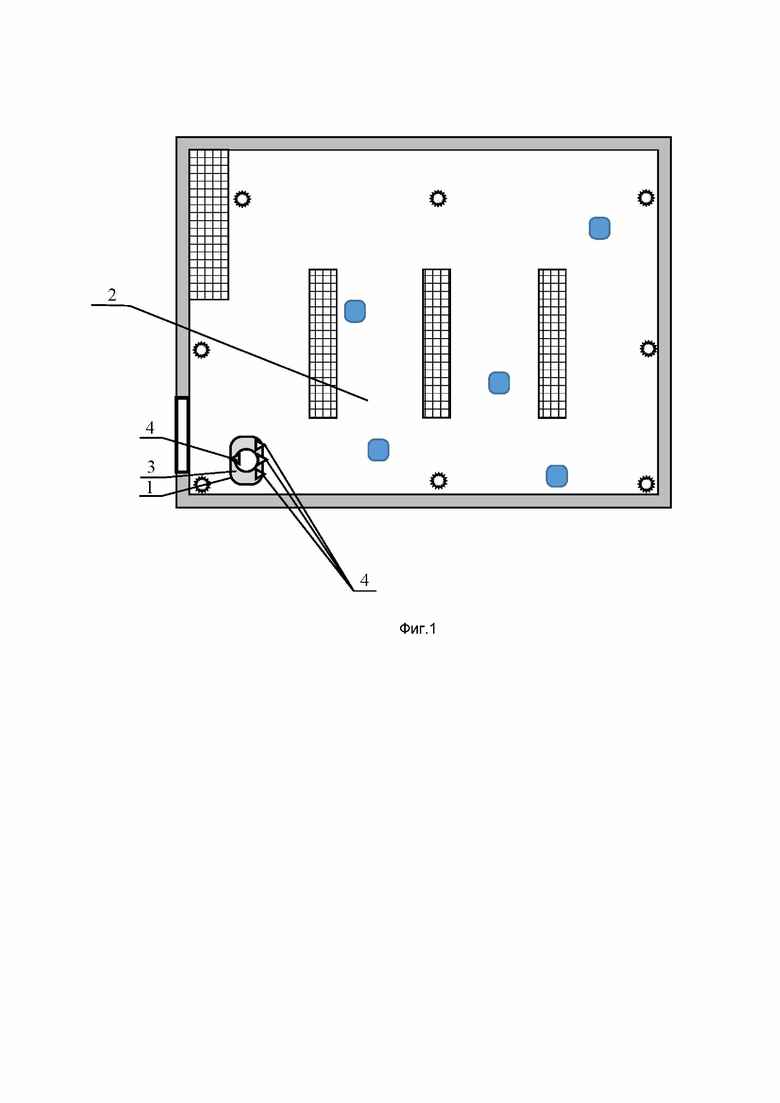
На фиг. 1 показана схема коммерческого помещения.
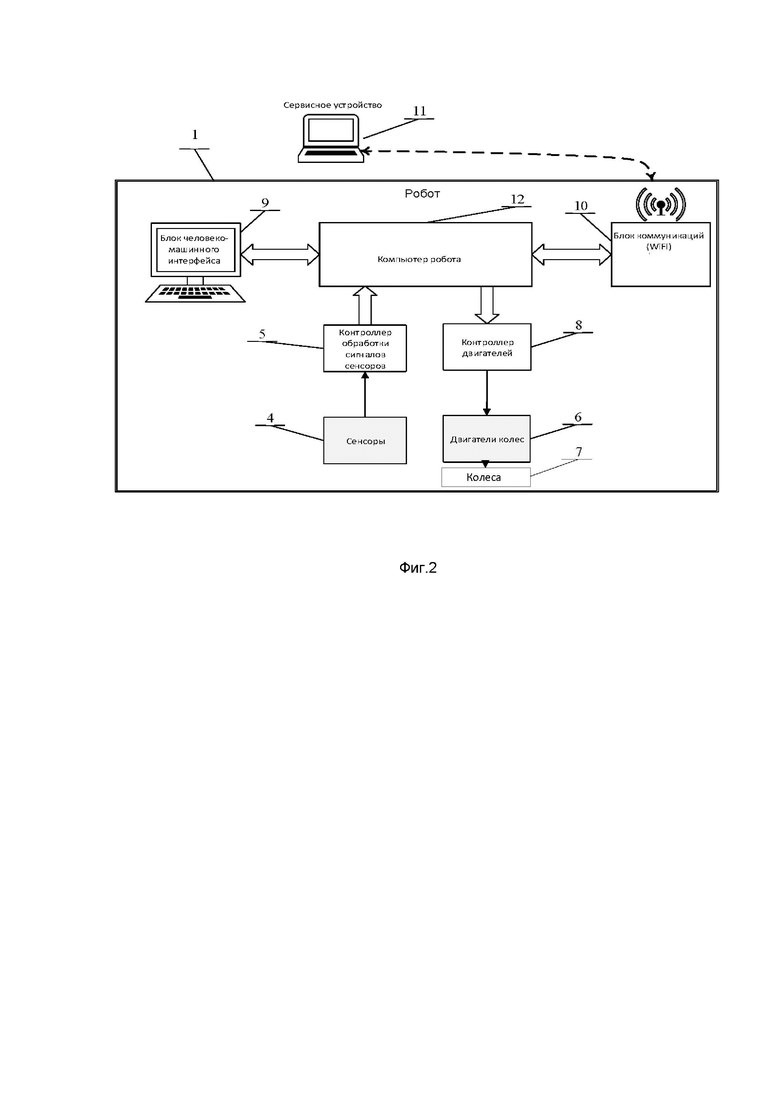
На фиг. 2 показана структурная схема мобильного сервисного робота.
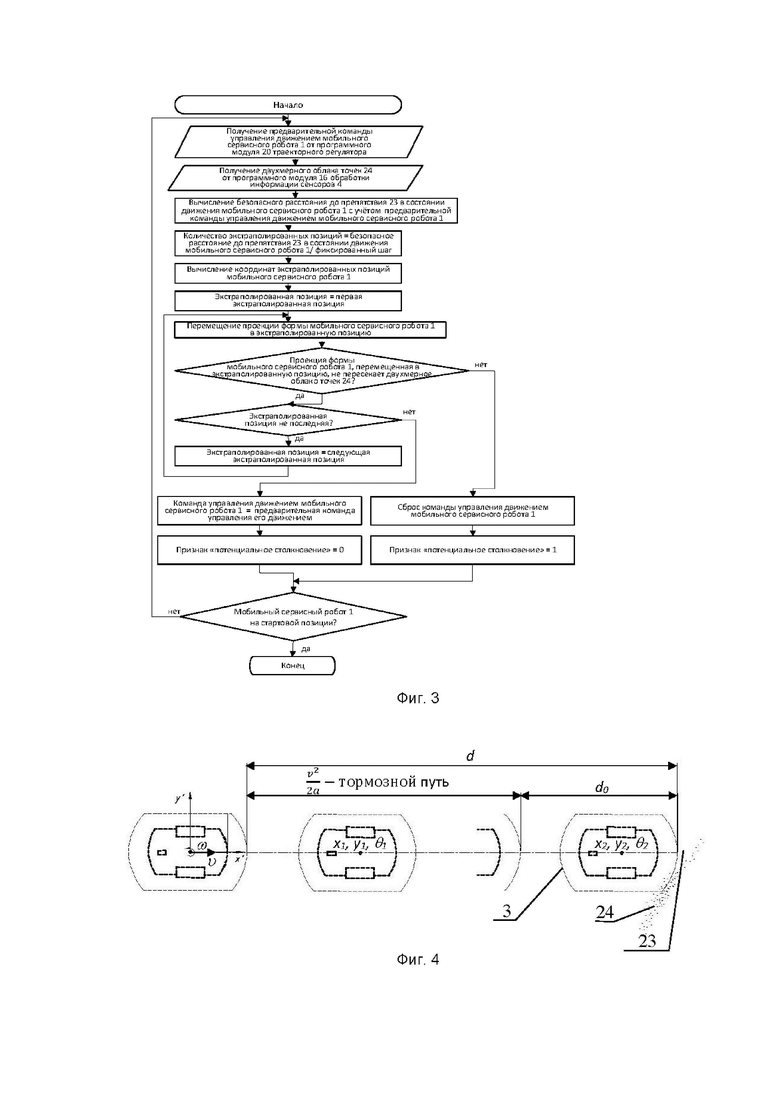
На фиг. 3 – схема алгоритма предотвращения столкновений.
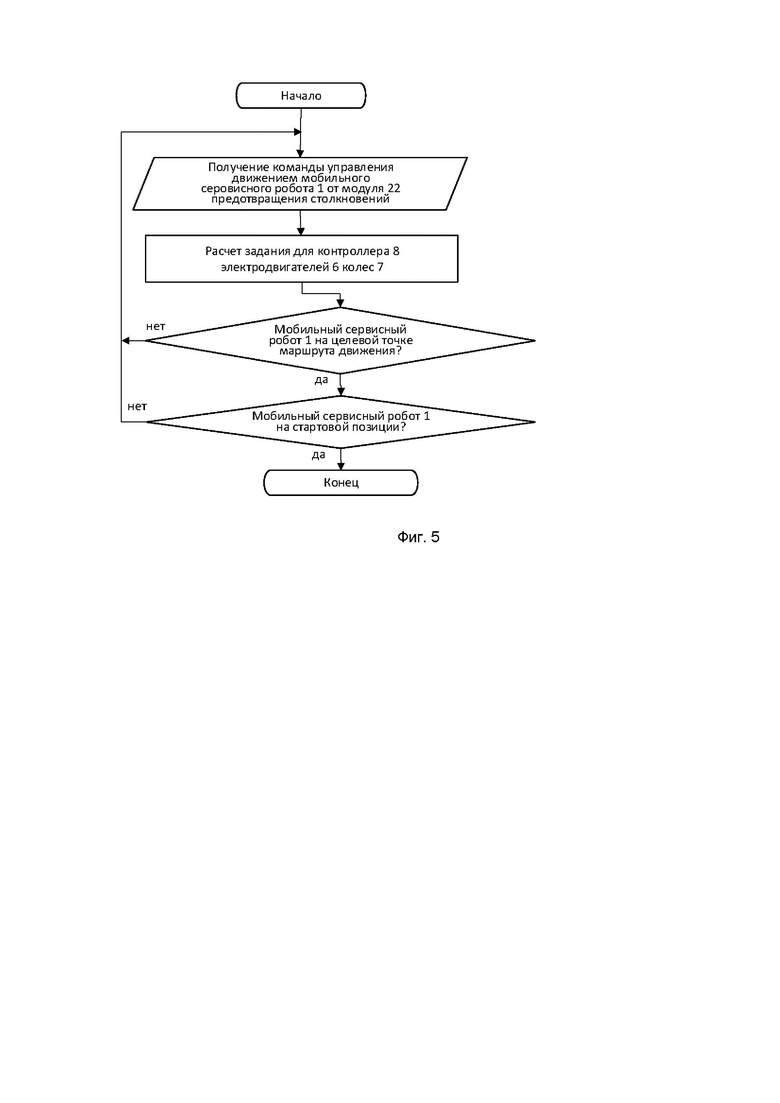
На фиг. 4 показана схема определения программным модулем предотвращения столкновений безопасного расстояния между проекцией мобильного сервисного робота и облаком точек препятствия.
На фиг. 5 – схема алгоритма программного драйвера управления электродвигателями колес.
Способ управления (фиг. 3-5) движением мобильного сервисного робота 1 (фиг. 1) в помещении 2 коммерческого объекта (фиг. 1), состоящего из подвижной платформы 3, сенсоров 4, контроллера 5 (фиг. 2) сенсоров 4, электродвигателей 6 колес 7 (фиг. 6), контроллера 8 электродвигателей 6, колес 7, блока 9 человеко-машинного интерфейса, блока 10 коммуникаций и сервисного устройства 11 с помощью системы управления (фиг. 3-4), имеющей:
- компьютер 12, размещенный на подвижной платформе 3 мобильного сервисного робота 1, сконфигурированный для управления движением.
Алгоритм (фиг. 3) предотвращения столкновений включает действия (шаги) по:
- получению программой предварительной команды управления движением мобильного сервисного робота 1 от программного модуля траекторного регулятора;
- получению программой двухмерного облака точек от программной обработки информации сенсоров 4;
- вычислению программой безопасного расстояния до препятствия 23 в состоянии движения мобильного сервисного робота 1 с учетом предварительной команды управления движением мобильного сервисного робота 1:
,
где – безопасное расстояние до препятствия 23 в состоянии движения мобильного сервисного робота 1,
– безопасное расстояние до препятствия в состоянии покоя мобильного сервисного робота 1,
– ожидаемый тормозной путь мобильного сервисного робота 1;
- вычислению программой координат , , n-ых экстраполированных позиций мобильного сервисного робота 1:
, , ,
где , , – экстраполированные координаты позиции мобильного сервисного робота 1;
– номер экстраполированной позиции мобильного сервисного робота 1;
– шаг экстраполяции во времени;
- перемещению проекции формы мобильного сервисного робота 1 в экстраполированную позицию с последующим определением наличия пересечения ею двухмерного облака точек 24 (фиг. 4).
Алгоритм (фиг. 5) программного драйвера управления электродвигателями 6 колес 7 включает:
- получение программой команды управления движением мобильного сервисного робота 1 от программного модуля предотвращения столкновений;
- расчет программой задания для контроллера 8 электродвигателей 6 колес 7 скоростей  и
и  первого и второго колес 7 робота 1 с радиусом
первого и второго колес 7 робота 1 с радиусом  и колеей
и колеей  :
:
 ,
,  ,
,
где  – скорость первого колеса 7 мобильного сервисного робота 1,
– скорость первого колеса 7 мобильного сервисного робота 1,
 – скорость второго колеса 7 мобильного сервисного робота 1,
– скорость второго колеса 7 мобильного сервисного робота 1,
 – величина колеи мобильного сервисного робота 1,
– величина колеи мобильного сервисного робота 1,
 – радиус колеса мобильного сервисного робота 1.
– радиус колеса мобильного сервисного робота 1.
Технический эффект, - повышение точности движения мобильного сервисного робота 1 по заданной траектории в динамическом окружении, - достигается за счет отличительных признаков способа управления мобильным сервисным роботом 1 с помощью описанной системы управления:
- после формирования траектории мобильного сервисного робота для каждого известного фрагмента траектории программным модулем траекторного регулятора вычисляются линейная и угловая скорости мобильного сервисного робота 1, с учетом заранее заданных пороговых максимальных значений линейной и угловой скоростей мобильного сервисного робота 1:
 ,
,  ,
,
где – линейная скорость мобильного сервисного робота 1,  – угловая скорость мобильного сервисного робота 1,
– угловая скорость мобильного сервисного робота 1,  – пороговая (максимальная) линейная скорость мобильного сервисного робота 1,
– пороговая (максимальная) линейная скорость мобильного сервисного робота 1,  – пороговая (максимальная) угловая скорость мобильного сервисного робота 1:
– пороговая (максимальная) угловая скорость мобильного сервисного робота 1:
- при обнаружении препятствия 23 и получении данных от сенсоров 4 в виде двухмерного облака точек обнаруженных препятствий 23 и контура мобильного сервисного робота 1 программным модулем предотвращения столкновений выполняются следующие действия (вычисления):
- вычисление программой безопасного расстояния до препятствия 23 в состоянии движения мобильного сервисного робота 1 с учетом предварительной команды управления движением мобильного сервисного робота 1:
,
где – безопасное расстояние до препятствия 23 в состоянии движения мобильного сервисного робота 1,
– безопасное расстояние до препятствия 23 в состоянии покоя мобильного сервисного робота 1,
– линейная скорость мобильного сервисного робота 1;
– линейное ускорение мобильного сервисного робота 1;
– ожидаемый тормозной путь мобильного сервисного робота 1;
- вычисление программой координат , , n-ых экстраполированных позиций мобильного сервисного робота 1:
, , ,
где , – экстраполированные координаты позиции мобильного сервисного робота 1;
– угол направления движения мобильного сервисного робота 1 в экстраполированной позиции;
– номер экстраполированной позиции мобильного сервисного робота 1;
– шаг экстраполяции во времени;
- выдача команды на перемещение проекции формы мобильного сервисного робота 1 в экстраполированную позицию;
- последующее определение наличия пересечения проекцией формы мобильного сервисного робота 1 двухмерного облака точек 24 препятствия 23 (Отмечено фигурой синего цвета).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ траекторного управления движением мобильного сервисного робота | 2024 |
|
RU2825211C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| Способ навигации мобильного сервисного робота | 2019 |
|
RU2736559C1 |
| Система взаимодействия человек-робот на основе смешанной реальности | 2022 |
|
RU2813444C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| Способ построения оптимальной траектории движения сервисных роботов в динамической среде | 2023 |
|
RU2828296C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| МЕТОД ОПРЕДЕЛЕНИЯ ЗОНЫ ДВИЖЕНИЯ И САМОСТОЯТЕЛЬНОГО ОБЪЕЗДА ПРЕПЯТСТВИЙ ДЛЯ БЕСПИЛОТНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ В ПОДЗЕМНЫХ ЗАМКНУТЫХ ПРОСТРАНСТВАХ | 2022 |
|
RU2803671C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2793982C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УТОЧНЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2794003C1 |
Изобретение относится к области робототехники и может быть использовано для управления движением мобильного сервисного робота, осуществляющего технологические функции на коммерческих объектах, с предотвращением его столкновений с препятствиями. Способ включает задание маршрута от модуля формирования маршрута движения, получение признака «потенциальное столкновение» от модуля предотвращения столкновений, установление начальной и целевой точек движения робота и предварительное указание расположения препятствий на карте. При обнаружении препятствия сенсорами в модуле обработки информации формируют двухмерное облако точек препятствия, которое передают вместе с данными о размерах контура платформы робота в модуль обработки информации, а затем - в модуль предотвращения столкновений и далее - в модуль управления движением, в котором формируют задание линейной и угловой скоростей движения робота и передают их в модуль драйвера управления электродвигателями и в контроллеры электродвигателей колес. Использование изобретения позволяет повысить точность движения робота по заданной траектории в условиях динамического окружения. 5 ил.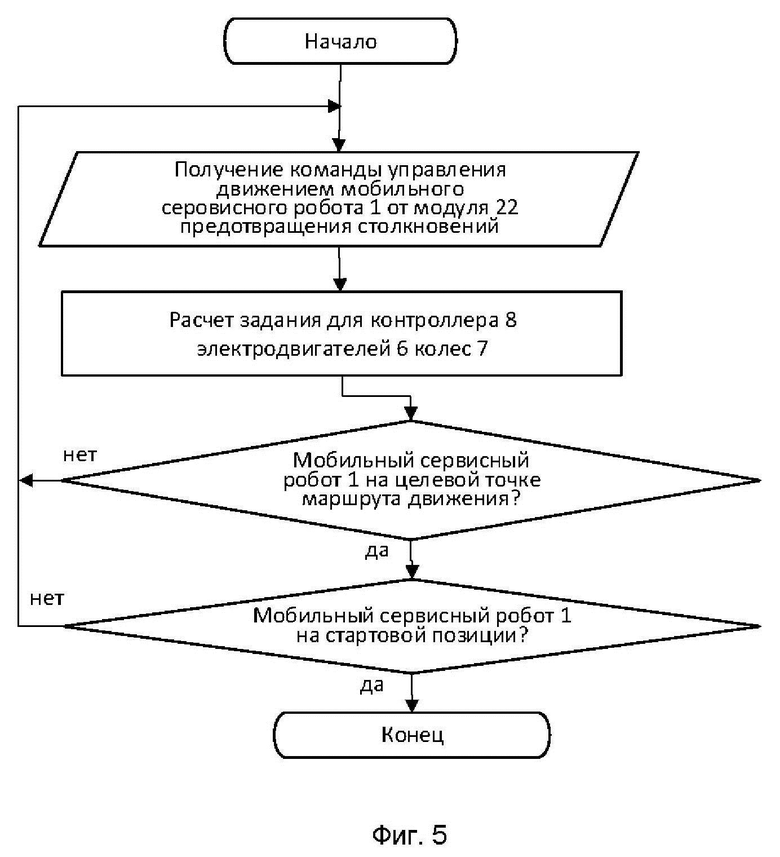
Способ управления движением мобильного сервисного робота, состоящего из подвижной платформы, электродвигателей колес с контроллером, сенсоров, контроллера сенсоров, блока человеко-машинного интерфейса, блока коммуникаций, сервисного устройства и системы управления, содержащей
компьютер, размещенный на упомянутой подвижной платформе робота и сконфигурированный для управления его движением с использованием:
- программного модуля формирования статической карты помещения коммерческого объекта с разбиением на зоны и с указанием порядка сканирования зон,
- программного модуля навигации,
- программного модуля обработки информации с лидаров и ультразвуковых датчиков,
- программного модуля формирования маршрута движения,
- программного модуля управления движением,
- модуля программного драйвера управления электродвигателями,
- программного модуля предотвращения столкновений,
включающий:
- получение заданного маршрута от программного модуля формирования маршрута движения,
- получение признака «потенциальное столкновение» от программного модуля предотвращения столкновений,
- установление начальной точки и целевой точки движения мобильного сервисного робота и
- предварительное указание расположения препятствий на карте,
отличающийся тем, что
при обнаружении препятствия сенсорами в программном модуле обработки информации сенсоров формируют двухмерное облако точек препятствия, которое передают вместе с данными о размерах контура платформы мобильного сервисного робота в программный модуль обработки информации сенсоров, а затем эти данные передают в программный модуль предотвращения столкновений и далее - в программный модуль управления движением, в котором формируют задание линейной и угловой скоростей движения мобильного сервисного робота и передают их в модуль программного драйвера управления электродвигателями и в контроллеры электродвигателей колес.
| CN 109945873 A, 28.06.2019 | |||
| БЕСПРОВОДНОЙ УПРАВЛЯЕМЫЙ РОБОТ-УБОРЩИК И СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ ИМ | 2005 |
|
RU2305029C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2450308C2 |
| 0 |
|
SU154324A1 | |
| US 2014350725 A1, 27.11.2014 | |||
| US 2019094866 A1, 28.03.2019 | |||
| WO 2015167220 A1, 05.11.2015. | |||

