Изобретение относится к области робототехники, а именно к способам управления движением по спланированному маршруту и предотвращения столкновений с препятствиями мобильного сервисного робота (далее - робота) в динамической среде.
Из уровня техники известен способ и электронное устройство для управления беспилотным автомобилем (см. патент на изобретение RU 2790105, МПК G05D 1/00 (2006.01), G05D 1/02 (2006.01), G05D 1/08 (2006.01), G05B 15/02 (2006.01), G08G 1/01 (2006.01), G08G 1/16 (2006.01), опубл. 08.12.2022 по заявке №2021116612 от 08.06.2021, патентообладатель - Общество с ограниченной ответственностью «Яндекс Беспилотные Технологии» (RU)).
Способ управления беспилотным автомобилем включает в себя генерирование пути, включающего в себя последовательность потенциальных положений, генерирование указаний запланированных скоростей для беспилотного автомобиля при следовании по последовательности потенциальных положений и побуждение управления беспилотным автомобилем вдоль пути в соответствии с запланированными скоростями. Генерирование запланированных скоростей включает в себя генерирование графа скорости, имеющего узлы и ребра, генерирование оценки времени для узла, показывающей количество времени, которое устройство имеет до запуска экстренного маневра для предотвращения столкновения с движущимся объектом, если беспилотный автомобиль находится в потенциальном состоянии, а движущийся объект выполняет неожиданный маневр в потенциальный будущий момент времени, генерирование стоимости для данного ребра с использованием оценки времени, определение последовательности ребер с использованием стоимости, и генерирование указаний запланированных скоростей с использованием последовательности ребер.
Недостаток указанного решения заключается в том, что получаемые пути не удовлетворяют всем кинематическим и динамическим ограничениям для конструкции объекта, а также его грузов. Еще одним недостатком таких алгоритмов является быстрый рост их сложности при увеличении размерности задачи.
Наиболее близким аналогом, выбранным в качестве прототипа, является способ построения маршрута движения и управления движением мобильного сервисного робота в торговом помещении (см. патент на изобретение RU 2769710, МПК B25J 13/08 (2006.01), B25J 9/16 (2006.01), G05D 1/02 (2006.01), опубл. 05.04.2022 по заявке №2021100630 от 14.01.2021, патентообладатели - Автономная некоммерческая образовательная организация высшего образования «Сколковский институт науки и технологий» (RU), Общество с ограниченной ответственностью «Платформа» (RU)).
Способ включает задание маршрута от модуля формирования маршрута движения, получение признака «потенциальное столкновение» от модуля предотвращения столкновений, установление начальной и целевой точек движения робота и предварительное указание расположения препятствий на карте. При обнаружении препятствия сенсорами в модуле обработки информации формируют двухмерное облако точек препятствия, которое передают вместе с данными о размерах контура платформы робота в модуль обработки информации, а затем - в модуль предотвращения столкновений и далее - в модуль управления движением, в котором формируют задание линейной и угловой скоростей движения робота и передают их в модуль драйвера управления электродвигателями и в контроллеры электродвигателей колес.
Недостатком данного способа является низкая безопасность движения робота по заданной траектории в динамическом окружении.
Техническим результатом заявляемого изобретения является повышение безопасности движения мобильного робота по заданной траектории в динамическом окружении путем отслеживания габаритов робота и предсказания его траектории движения.
Динамические объекты описывают в виде ограничивающих прямоугольников, имеющих следующие параметры: габариты объекта (длина, ширина, высота), текущая скорость движения, предсказанная траектория движения объекта на заданный временной интервал. Данную информацию также используют для оценки возможного столкновения робота с объектами динамического окружения.
Указанный технический результат достигается благодаря способу траекторного управления движением робота, характеризующемуся тем, что внешние данные, поступающие с компонентов, а также с сенсоров и датчиков робота, например, карта занятости, текущее положение робота и локальная траектория движения, одновременно подают на программный модуль работы с динамическими объектами, на программный модуль управления движением и на программный модуль расчета габаритов робота и формирования предсказанной траектории движения. В программном модуле работы с динамическими объектами осуществляют проверку возможного пересечения локальной траектории с динамическими объектами, а именно, выполняют поиск в трехмерном пространстве (х, у, t) наиболее близких точек локальной траектории робота и предсказанной траектории движения динамического объекта, представляют ограничивающие многоугольники, описывающие форму препятствия и робота, в форме вписанных окружностей, выполняют проверку пересечения данных окружностей для найденных ближайших точек, формируют команду снижения скорости вплоть до полной остановки в случае пересечения данных окружностей. Далее данную команду направляют на программный модуль управления движением для обеспечения расчета команд управления. В программном модуле управления движением расчета команд управления выполняют расчет команд управления, а именно, осуществляют выбор точки следования по локальной траектории движения на определенном расстоянии от текущей позиции, формируют кривизну дуги движения робота от текущего положения до точки следования, рассчитывают ошибки регулирования при получении разницы между текущим курсовым углом и углом на точку упреждения. Затем на основании ошибки регулирования и сформированной кривизны дуги рассчитывают команды управления для робота, а именно, линейную и угловую скорости движения или, при необходимости, линейную скорость движения и угол поворота колес, в зависимости от конструкции мобильного сервисного робота. Для учета габаритов робота, при которых он может задевать препятствия, команды управления с программного модуля управления движением направляют на программный модуль расчета габаритов робота и формирования набора предсказанных траекторий движения. В данном модуле осуществляют учет габаритов мобильного сервисного робота, при которых он может задевать препятствия, а именно, рассчитывают будущую траекторию движения робота на определенное расстояние вперед или до достижения определенного события, анализируют рассчитанное движение робота на предмет столкновения с препятствиями с учетом его габаритов. В случае отсутствия возможности дальнейшего движения по локальной траектории из-за близко расположенного препятствия, в программном модуле расчета габаритов робота и формирования набора предсказанных траекторий движения формируют различные теоретические траектории движения робота от препятствия и проверяют их на безопасность движения. При этом, как только обнаруживают первую безопасную траекторию движения, осуществляют анализ выбранной траектории и направляют эти данные в программный модуль управления движением расчета команд управления, в котором формируют соответствующие управляющие команды для безопасного отъезда мобильного сервисного робота от препятствия. Отъезд происходит до тех пор, пока габариты робота не окажутся свободными для включения компонента планирования локальной траектории с целью продолжения движения в рамках заданного маршрута. Далее, команды управления, сформированные в программном модуле управления движением, отправляют в ходовую часть мобильного сервисного робота, где производят пересчет требуемых линейной и угловой скоростей, а при необходимости, линейной скорости движения и угла поворота колес, в зависимости от конструкции робота, в обороты вращения колес, а затем и в обороты вращения электродвигателей, непосредственно вращающих колеса, для движения и поворотов с нужными скоростями.
Таким образом, заявляемое техническое решение соответствует критерию изобретения «новизна». Сравнение заявляемого технического решения с другими защищенными патентами техническими решениями в данной области техники позволяет сделать вывод о соответствии критерию «изобретательский уровень». Заявляемое решение пригодно к осуществлению промышленным путем.
Сущность заявляемого технического решения поясняется нижеследующим описанием и фигурами, где:
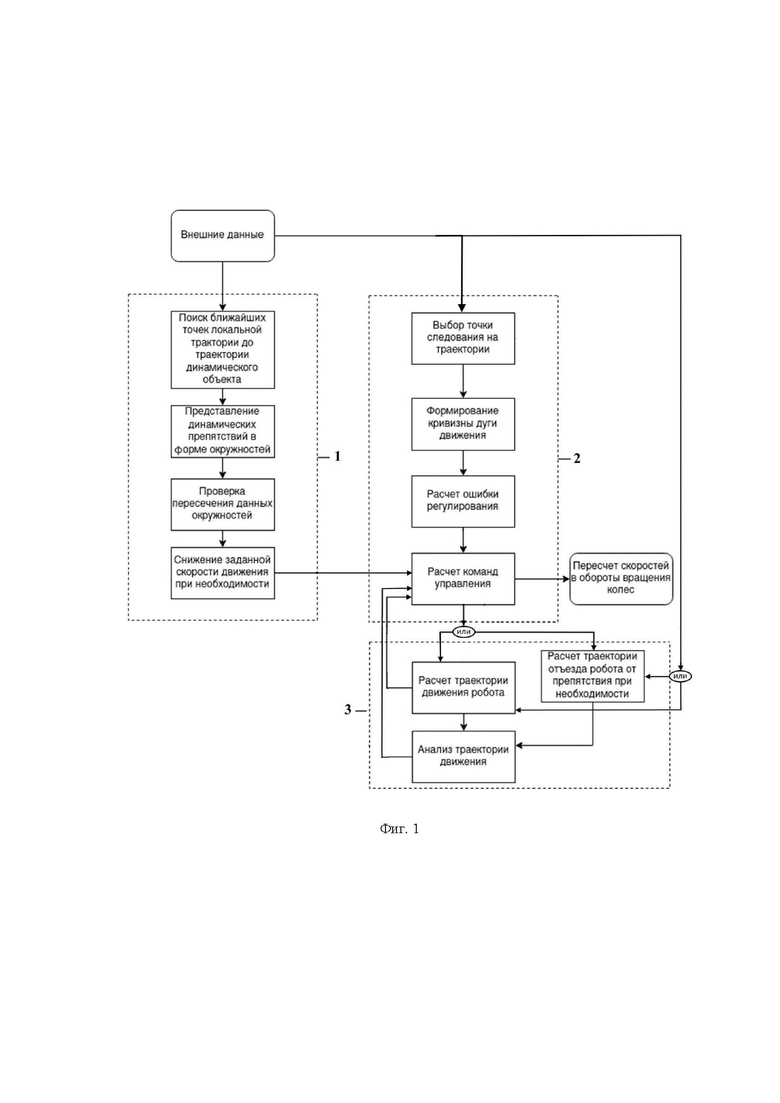
- на фиг. 1 показана блок-схема реализации заявляемого способа;
- на фиг. 2 - принцип действия алгоритма управления движением;
- на фиг. 3 - визуальный пример предсказанного движения робота с учетом его габаритов.
Заявляемый способ реализуется следующим образом. Для работы заявляемого способа требуются определенные внешние входные данные, поступающие с компонентов робота. На роботе должна быть заранее загруженная или самостоятельно подготовленная карта местности, на которой он будет двигаться. Также на роботе имеется определенный набор сенсоров и датчиков, которые в реальном времени выдают облака точек всего, что есть вокруг робота. Отдельный компонент робота сопоставляет данные облаков точек с картой местности и текущим положением робота, после чего выдает данные о препятствиях в виде так называемой карты занятости. Карта занятости представляет собой матрицу, ячейки которой обозначают собой координаты х, у и если ячейка занята, то в этих координатах имеется препятствие, если свободна - препятствий нет. Еще один компонент робота представляет собой навигационную систему, которая в каждый момент времени выдает текущее положение робота, его координаты и угол ориентации относительно подготовленной карты местности. Следующий компонент робота позволяет человеку (оператору) задать маршрут на подготовленной карте, по которому должен двигаться робот и, при необходимости, выполнять определенные задачи. На основании всех вышеперечисленных данных еще один компонент робота формирует локальную траекторию движения для робота, т.е. текущую траекторию движения для робота с учетом поставленных задач и окружающей обстановки.
В итоге все эти данные (карта занятости, текущее положение робота и локальная траектория движения) подают одновременно на программный модуль работы с динамическими объектами (1), на программный модуль управления движением (2) и на программный модуль расчета габаритов робота и формирования предсказанной траектории движения (3) (см. фиг. 1).
В программном модуле работы с динамическими объектами (1) осуществляют проверку возможного пересечения указанной траектории динамическими объектами. Алгоритм работы с динамическими объектами включает следующие шаги:
- выполнение программой поиска (в пределах заданного временного интервала) в трехмерном пространстве (х, у, t) наиболее близких точек локальной траектории робота и предсказанной траектории движения динамического объекта. Для оценки расстояния используют евклидову метрику;
- представление в виде набора вписанных окружностей ограничивающих многоугольников, описывающих форму препятствия и робота;
- выполнение проверки пересечения данных окружностей для найденных ближайших точек;
- формирование команды снижения скорости вплоть до полной остановки, в случае, если наблюдается пересечение робота с препятствиями. Таким образом, осуществляют маневр "уступи дорогу". В этом случае робот не сходит с заранее рассчитанного маршрута, минимизирует отклонение от него. Использование представления объектов в виде набора окружностей выбрано с целью минимизации вычислительных ресурсов, так как поиск пересечения многоугольников является более "затратной" операцией. Если пересечения нет, значит робот разойдется с динамическим препятствием при сохранении текущей скорости движения, соответственно, никаких действий предпринимать не надо и робот продолжает движение без изменений.
Далее, сформированную команду о снижении скорости движения робота направляют на программный модуль управления движением (далее - регулятор) (2) для обеспечения расчета команд управления. Алгоритм управления движением включает в себя следующие шаги:
- выбор точки следования по локальной траектории на определенном расстоянии от текущей позиции, то есть на основании параметра l выбирают точку на локальной траектории, к которой будет двигаться робот;
- расчет кривизны дуги движения робота, т.е. по какой дуге необходимо проехать роботу, чтобы добраться до желаемой точки локальной траектории (при движении прямо - кривизна равна 0, т.е. дуга является прямой линией). Соответственно, если замыкать дугу движения робота, то будет образовываться окружность с определенным радиусом поворота (за исключением движения прямо) На фиг. 2 (х, у) - разница между следующей и текущей точками локальной траектории по координатам X и Y; l - настраиваемый параметр, который определяет дальность выбора точки следования на траектории движения; r - радиус поворота робота; d - смещение координаты X от центра окружности поворота робота. Таким образом, известны текущее положение робота и угол его ориентации, а также координаты точки следования;
- расчет разницы (которая считается ошибкой регулирования) между текущим курсовым углом и углом на точку упреждения;
- расчет на основании данной ошибки регулирования необходимых команд управления для робота - линейной и угловой скоростей движения робота или, при необходимости, линейной скорости движения и угла поворота колес, в зависимости от конструкции робота; при этом формируемые угловая и линейная скорости зависят от параметра l и кривизны траектории движения.
Для учета габаритов самого робота, при которых он может задевать препятствия, и для повышения безопасности его движения по локальной траектории команды управления направляют на программный модуль расчета габаритов робота (далее - предиктор) (3) («Предиктор (от англ. predictor «предсказатель») - прогностический параметр; средство прогнозирования» https://dic.academic.ru/dic.nsf/ruwiki/302122). Предиктор расширяет возможности регулятора, адаптируя его под заданные требования безопасности. Алгоритм расчета габаритов робота включает в себя следующие шаги:
- расчет будущей траектории движения робота на определенное расстояние вперед или до достижения определенного события. А именно, на основании текущего положения робота и текущих сформированных регулятором команд управления рассчитывают на некоторое расстояние вперед будущее положение робота с интервалами, равными временному шагу расчета, который задает оператор, и выбирают на основании требований к точности предсказания движения. Например, расчет с временным шагом в одну секунду означает, что предиктор будет считать движения робота каждую секунду и не будет знать промежуточное поведение робота. Соответственно, чем меньше временной шаг расчета, тем точнее предсказание движения робота, но тем больше вычислительные затраты, и наоборот. Через каждый временной шаг расчета предиктор отправляет новое (предсказанное) положение робота из будущего обратно на регулятор для того, чтобы регулятор рассчитал команды управления для этого нового положения робота. После чего предиктор получает рассчитанные команды управления для нового положения робота и рассчитывает следующее положение робота на следующий временной шаг вперед. Таким образом, замыкается цикл расчета прогнозируемого положение робота. Этот цикл рассчитывает движение робота на определенное расстояние вперед;
- анализ рассчитанного движения робота на предмет столкновения с препятствиями с учетом его габаритов. То есть, если на каком-либо временном шаге расчета предиктор обнаруживает, что траектория будущего движения робота пересекает препятствие (с учетом его габаритов), он посылает регулятору информацию о точке (или точках) на карте движения робота, где небезопасно, для того, чтобы регулятор пересчитал новые управляющие воздействия для робота с учетом новых ограничений. После чего цикл запускается заново с учетом скорректированных команд управления.
Также возможны случаи, когда робот попадает в ситуацию, в которой дальнейшее движение по локальной траектории невозможно. Например, к нему вплотную подошел человек или другое препятствие. В таком случае компонент построения локальной траектории движения не сможет выдать траекторию, так как текущее положение робота будет находиться в препятствии. Чтобы робот просто не стоял на месте в ожидании, пока препятствие само отодвинется от него, предиктор формирует различные теоретические траектории движения робота от препятствия и проверяет их на безопасность движения. Как только предиктор обнаруживает первую безопасную траекторию движения, осуществляют анализ выбранной траектории и направляют эти данные на регулятор, который формирует соответствующие управляющие команды для безопасного отъезда от препятствия. Таким образом, происходит безопасный отъезд от препятствия до тех пор, пока габариты робота не окажутся свободными, далее снова включается компонент планирования локальной траектории и робот продолжает движение в рамках заданного маршрута.
Команды управления, сформированные в программном модуле управления движением, отправляются в ходовую часть робота на исполнение. Обычно там происходит пересчет требуемых линейной и угловой скоростей робота, при необходимости, линейной скорости движения и угла поворота колес, в зависимости от конструкции робота, в обороты вращения колес, а затем и в обороты вращения электродвигателей, непосредственно вращающих колеса. Таким образом, мобильный робот двигается и поворачивает с нужными скоростями.
На фиг. 3 показан визуальный пример движения робота с учетом алгоритма расчета габаритов робота, где прямоугольники - это вид сверху робота при прогнозируемом движении по заданной траектории с учетом его габаритов, точки и объединяющая их линия это точки следования робота и локальная траектория движения робота, черный прямоугольник и черные толстые линии - это препятствия.
Заявляемый способ траекторного управления движением мобильного сервисного робота, позволяет осуществлять управление движением робота в динамической среде, с целью предотвращения столкновений, путем отслеживания габаритов робота и построения траектории его движения в режиме реального времени.
Заявляемое изобретение является универсальным и может использоваться на различных видах мобильных платформ: колесные, гусеничные, мобильные роботы с системой аккермана и с дифференциальной системой поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ МАРШРУТА ДВИЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО СЕРВИСНОГО РОБОТА В ТОРГОВОМ ПОМЕЩЕНИИ | 2021 |
|
RU2769710C1 |
| Способ построения оптимальной траектории движения сервисных роботов в динамической среде | 2023 |
|
RU2828296C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| Система взаимодействия человек-робот на основе смешанной реальности | 2022 |
|
RU2813444C1 |
| Способ навигации мобильного сервисного робота | 2019 |
|
RU2736559C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ РОБОТОМ | 2015 |
|
RU2619542C1 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| Способ для адаптивного управления характеристиками движения высокоавтоматизированного транспортного средства в зависимости от уровня неопределенности в оценке окружающей ситуации | 2021 |
|
RU2783780C1 |

Изобретение относится к области робототехники. Согласно способу траекторного управления движением робота внешние данные, поступающие с компонентов, а также с сенсоров и датчиков робота, одновременно подают на программный модуль работы с динамическими объектами, на программный модуль управления движением и на программный модуль расчета габаритов робота и формирования предсказанной траектории движения. В программном модуле работы с динамическими объектами осуществляют проверку возможного пересечения локальной траектории с динамическими объектами. В программном модуле управления движением расчета команд управления выполняют расчет команд управления. На основании ошибки регулирования и сформированной кривизны дуги рассчитывают команды управления для робота. Для учета габаритов робота команды управления с программного модуля управления движением направляют на программный модуль расчета габаритов робота и формирования набора предсказанных траекторий движения. Команды управления отправляют в ходовую часть мобильного сервисного робота. Достигается повышение безопасности движения мобильного робота по заданной траектории в динамическом окружении путем отслеживания габаритов робота и предсказания его траектории движения. 3 ил.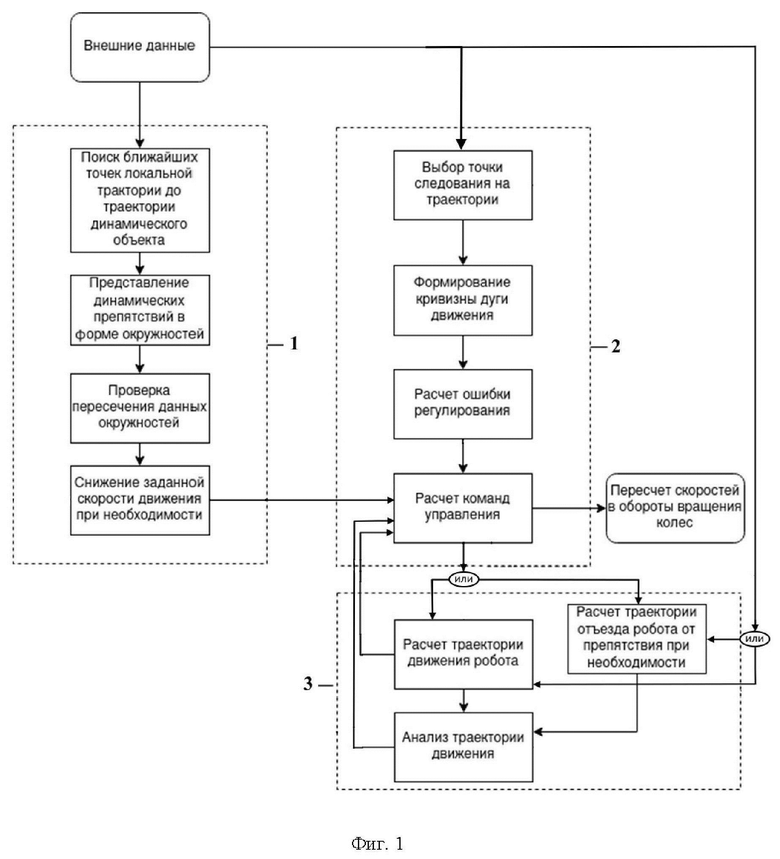
Способ траекторного управления движением мобильного сервисного робота,
характеризующийся тем, что:
- получают внешние данные, поступающие с компонентов, а также с сенсоров и датчиков мобильного сервисного робота, а именно карту занятости, текущее положение робота и локальную траекторию движения;
- полученные данные одновременно подают на программный модуль работы с динамическими объектами, на программный модуль управления движением и на программный модуль расчета габаритов мобильного сервисного робота и формирования предсказанной траектории движения;
- в программном модуле работы с динамическими объектами осуществляют проверку возможного пересечения локальной траектории с динамическими объектами, а именно выполняют поиск в трехмерном пространстве (x, y, t) наиболее близких точек локальной траектории мобильного сервисного робота и предсказанной траектории движения динамического объекта, представляют ограничивающие многоугольники, описывающие форму препятствия и мобильного сервисного робота, в форме вписанных окружностей, выполняют проверку пересечения данных окружностей для найденных ближайших точек, формируют команду снижения скорости вплоть до полной остановки в случае пересечения данных окружностей, которую направляют на программный модуль управления движением для обеспечения расчета команд управления;
- в программном модуле управления движением расчета команд управления выполняют расчет команд управления, а именно осуществляют выбор точки следования по локальной траектории движения на определенном расстоянии от текущей позиции, формируют кривизну дуги движения мобильного сервисного робота от текущего положения до точки следования, рассчитывают ошибки регулирования при получении разницы между текущим курсовым углом и углом на точку упреждения, на основании ошибки регулирования и сформированной кривизны дуги рассчитывают команды управления для мобильного сервисного робота, а именно линейную и угловую скорости движения или, при необходимости, линейную скорость движения и угол поворота колес, в зависимости от конструкции мобильного сервисного робота;
- для учета габаритов мобильного сервисного робота, при которых он может задевать препятствия, команды управления с программного модуля управления движением направляют на программный модуль расчета габаритов мобильного сервисного робота и формирования набора предсказанных траекторий движения;
- в программном модуле расчета габаритов мобильного сервисного робота и формирования набора предсказанных траекторий движения осуществляют учет габаритов мобильного сервисного робота, при которых он может задевать препятствия, а именно рассчитывают будущую траекторию движения мобильного сервисного робота на определенное расстояние вперед или до достижения определенного события, анализируют рассчитанное движение мобильного сервисного робота на предмет столкновения с препятствиями с учетом его габаритов;
- в случае отсутствия возможности дальнейшего движения по локальной траектории из-за близко расположенного препятствия, в программном модуле расчета габаритов мобильного сервисного робота и формирования набора предсказанных траекторий движения формируют различные теоретические траектории движения мобильного сервисного робота от препятствия и проверяют их на безопасность движения, при этом, как только обнаруживают первую безопасную траекторию движения, осуществляют анализ выбранной траектории и направляют эти данные в программный модуль управления движением расчета команд управления, в котором формируют соответствующие управляющие команды для безопасного отъезда мобильного сервисного робота от препятствия, причем отъезд происходит до тех пор, пока габариты мобильного сервисного робота не окажутся свободными для включения компонента планирования локальной траектории с целью продолжения движения в рамках заданного маршрута;
- команды управления, сформированные в программном модуле управления движением, отправляют в ходовую часть мобильного сервисного робота, где производят пересчет требуемых линейной и угловой скоростей, а при необходимости линейной скорости движения и угла поворота колес, в зависимости от конструкции мобильного сервисного робота, в обороты вращения колес, а затем и в обороты вращения электродвигателей, непосредственно вращающих колеса, для движения и поворотов с нужными скоростями.
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ГЛАДКИХ ТРАЕКТОРИЙ ДВИЖЕНИЯ МОБИЛЬНОГО РОБОТА В НЕИЗВЕСТНОМ ОКРУЖЕНИИ | 2016 |
|
RU2661964C2 |
| US 11016491 B1, 25.05.2021 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДИНАМИЧЕСКОГО ОБЪЕКТА ПО ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2012 |
|
RU2480805C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОЙ СРЕДЕ | 2012 |
|
RU2479015C1 |

