Изобретение относится к навигационному приборостроению, а именно к магнитным судовым компасам, и может быть использовано для коррекции показаний магнитного компаса при прохождении заданных маршрутов с дистанционной передачей изображения шкалы курса компаса, например, в пост рулевого и другим потребителям.
С древних времен определение местонахождения судов (кораблей) в открытом море проводилось визуально по полярной звезде созвездия Большой Медведицы в Северном полушарии и по созвездию Южный Крест в южном полушарии. Погрешность определения, конечно, была большая. Как известно, компас впервые был изобретен в Китае в очень давние времена ≈2000 лет до н.э. Наверняка его использовали и для судовождения (навигации) китайцы на своих джонках, но данных об этом почти нет.
В средние века определение местонахождения судов определялось с помощью секстанта и хронометра по солнцу. Погрешность определения была значительно меньше и вполне достаточна для морского плавания при наличии солнца, а в плохую погоду - по счислению и картам, также это не подходит для высоких широт, например, за полярным кругом, когда наступает полярная ночь. В каботажном же плавании местонахождение определяется по маякам и лоциям.
В настоящее время навигация происходит по счислению пути, а коррекция опять же по секстанту.
Известен морской магнитный компас, содержащий котелок с рабочей жидкостью и расположенные в нем шпильку и катушку (Терехов И.Н. и др. Магнитные компасы. Курс кораблевождения Т. 5, кн 2, Л. Гидрометеоиздат, 1959, с. 192).
Известен также морской компас, содержащий заполненный рабочей жидкостью герметичный котелок с белым покрытием внутренних стенок. Внутри котелка установлена шпилька с уравновешенными катушкой и поплавком. Покрытие внутренних стенок котелка выполнено нейтральными по отношению к рабочей жидкости (Кожухов В.И др. Магнитные компасы. М.. Транспорт, 1981, с. 152-155).
Недостаток этого метода. Компас определяет направление, основываясь только на восприятии магнитного поля Земли. Известный компас сложен в изготовлении, не отвечает современным требованиям, имеет невысокую точность определения направления, не имеет возможности электрического соединения с другими системами.
Известен магнитный компас, предназначенный для эксплуатации на морских и речных судах (патент России RU 2010160 С1). Сущность изобретения: устройство состоит из герметичного заполненного рабочей жидкостью котелка, в котором установлена шпилька. На шпильке размещены уравновешенные катушка и поплавок. Внутренняя поверхность котелка покрыта слоем белой водостойкой краски, нейтральной по отношению к рабочей жидкости в виде дистиллированной воды, насыщенной кремнием. При эксплуатации в условиях низких температур котелок компаса может быть залит водным раствором «Тосола».
Недостатки известного решения: компас сложен в изготовлении, имеет высокую стоимость. Компас не использует электрические преобразователи и использует только энергию магнитного поля Земли, не отвечает современным требованиям, достаточно громоздкий, используется только для наблюдения за направлением корабля непосредственно по показаниям табло на компасе.
Недостатками известных технических решений является использование только магнитного поля Земли для определения движения корабля, они не имеют возможности коррекции курса по другим источникам координатных сигналов.
Известно «Устройство для уточнения показаний магнитного компаса» по заявке №96101662/28 от 10.04.1998. Устройство для уточнения показаний магнитного компаса, содержащее измерители магнитного и эталонного курса и вычислительный блок, отличающееся тем, что введены цифроаналоговый преобразователь, усилитель и исполнительный двигатель с редуктором, измеритель магнитного курса выполнены в виде трехкомпонентного блока магнитометров, измерителем эталонного курса является курсовертикаль, при этом выходы курсовертикали по эталонному курсу, крену и тангажу и измерителя магнитного курса соединены с входами вычислительного блока, выход вычислительного блока соединен с входом цифроаналогового преобразователя, выход которого соединен с входом усилителя, выход усилителя соединен с исполнительным редуктором, выход которого является выходом устройства.
Хотя заявка и старенькая, но интересен сам подход к уточнению показаний. Недостаток очевиден: очень сложное устройство и достаточно дорогое: современные курсовертикали стоят порядка миллиона руб. Следует отметить, что погрешность магнитных компасов составляет в среднем 0,2-0,3°.
Наиболее близким техническим решением является патент РФ №2441201 С1. Магнитный компас с дистанционной телеметрической передачей изображения шкалы курса. Техническим результатом которого является улучшение эксплуатационных характеристик устройства, повышение точности передачи изображения шкалы курса при воздействии качки, обеспечение работы одновременно с пеленгатором без нарушения трансляции изображения шкалы курса, увеличение линии передачи, по которой обеспечивается трансляция изображения шкалы курса от котелка до экрана монитора. Магнитный компас с дистанционной телеметрической передачей изображения шкалы курса состоит из котелка, внутри которого находится магниточувствительный элемент со шкалой на опоре и индекс. Котелок установлен на карданном подвесе в нактоузе и оснащен пеленгатором. Компас снабжен видеокамерой, монитором и осветительным устройством. Недостатком прототипа является отсутствие коррекции ошибок по надежным источникам определения координат судна, а как следствие, и курса.
Технической задачей изобретения является повышение точности выдерживания заданных курсов на всем пути следования.
Технический результат достигается за счет коррекции показаний магнитного компаса по сигналам спутниковых навигационных систем GPS/ГЛОНАСС путем сравнения действительного курса с заданным (эталонным).
Для решения поставленной задачи предлагается цифровая магнитная компасная система с коррекцией, характеризующаяся тем, что содержит следующие составные узлы и части: цифровой магнитный компас - ЦМК, приемник спутниковых навигационных сигналов GPS/ГЛОНАСС, буферный усилитель, ЖКИ-индикатор, репитер, конвертер и персональный компьютер - ПК со следующими соединениями: спутниковые навигационные сигналы GPS/ГЛОНАСС через приемник этих сигналов соединены с первым информационным входом ЦМК, а со вторым информационным входом компаса соединены силовые линии магнитного поля Земли, выход ЦМК первой сигнальной шиной через конвертер соединен с ПК, также выход ЦМК через буферный усилитель второй сигнальной шиной соединен с репитером, третьей сигнальной шиной с ЖКИ, а четвертой шиной - с другими потребителями курсовой информации компаса в ходовой рубке.
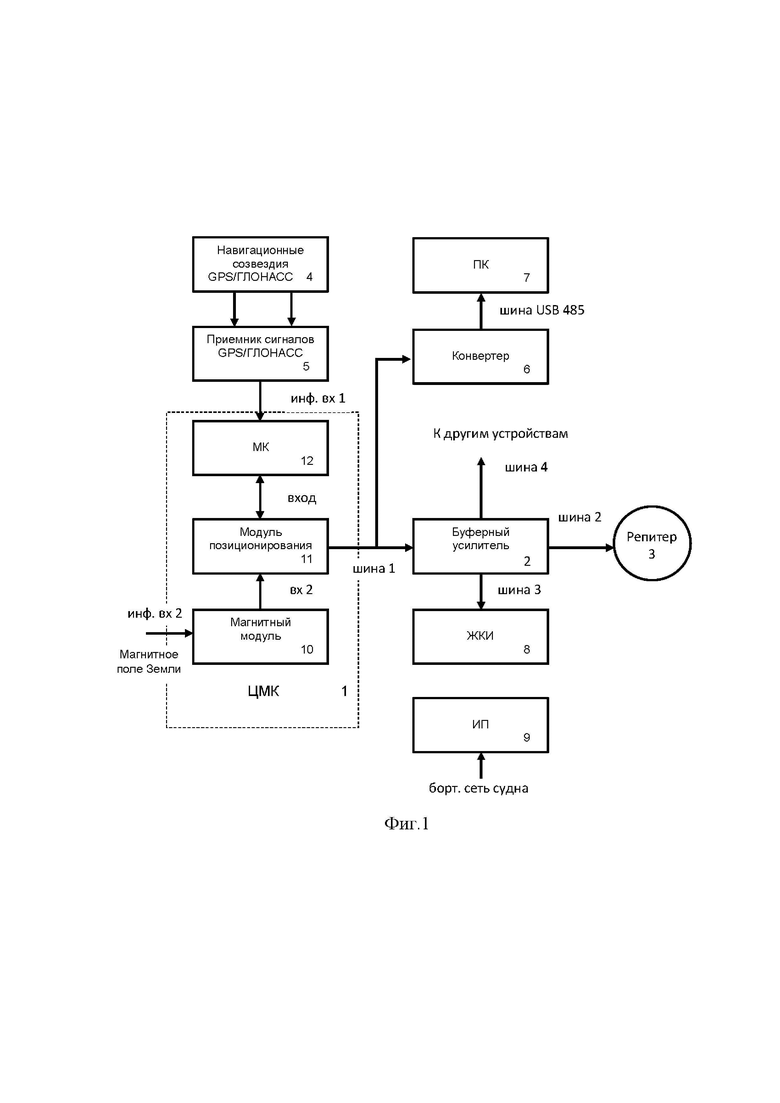
На чертеже (фиг. 1) представлена структурная электрическая схема системы, на которой изображено:
1 - цифровой магнитный компас (ЦМК)
2 - буферный фильтр-усилитель
3 - репитер
4 - навигационные спутниковые созвездия GPS/ГЛОНАСС
5 - приемник сигналов GPS/ГЛОНАСС
6 - конвертер
7 - персональный компьютер (ПК)
8 - цифровое устройство отображения, например, жидкокристаллический индикатор (ЖКИ)
9 - источник питания
шина интерфейса USB-485 последовательного кода
шины 1-4 NMEA 0183
В цифровой магнитный компас входят:
10 - магнитный модуль
11 - модуль позиционирования
12 - микроконтроллер
входные/выходные шины ИП9 условно не показаны.
Система имеет следующие соединения. Цифровая магнитная компасная система с коррекцией, характеризующаяся тем, что содержит следующие составные узлы и части: цифровой магнитный компас - ЦМК 1, приемник спутниковых навигационных сигналов GPS/ГЛОНАСС 5, буферный усилитель 2, ЖКИ-индикатор 8, репитер 3, конвертер 6 и персональный компьютер - ПК 7 со следующими соединениями: спутниковые навигационные сигналы GPS/ГЛОНАСС через приемник этих сигналов соединены с первым информационным входом ЦМК, а со вторым информационным входом компаса соединены силовые линии магнитного поля Земли, выход ЦМК 1 первой сигнальной шиной через конвертер 6 соединен с ПК 7, также выход ЦМК через буферный усилитель 2 второй сигнальной шиной соединен с репитером 3, третьей сигнальной шиной с ЖКИ 8, а четвертой шиной - с другими потребителями курсовой информации компаса в ходовой рубке.
Внутри ЦМК находится 3 основных компонента: магнитный модуль HMC5883L, модуль позиционирования NEO-7M и микроконтроллер ATMEGA128. Во время работы микроконтроллер ATMEGA128 непрерывно собирает данные из этих двух модулей, затем переходит к вычислению двух значений азимута, соответствующих двум типам сигналов, полученных от двух модулей. Затем ATMEGA128 использует формулу вычисления, чтобы получить значение азимута путем объединения двух значений азимута, полученных выше, и применения алгоритма фильтра Калмана. Наконец, значение азимута упаковывается с символами, необходимыми для формирования пакета данных компаса NMEA0183, а затем передается на другие устройства.
Цифровое устройство отображения - ЖКИ.
Это устройство отображает направление и скорость поворота корабля. Угол направления данных корабля поступает от цифрового магнитного компаса в виде пакетов NMEA0183. Преимущества этого устройства: удобный просмотр, простая установка и использование.
Репитер гирокомпаса.
Это устройство используется для отображения направления движения судна в форме «вращающихся стрелок». Входной сигнал NMEA0183 поступает из цифрового магнитного компаса. Преимущества этого устройства заключаются в его прочности, эстетичности, возможности выдерживать жесткие внешние условия эксплуатации.
Буферное устройство и усилитель сигнала NMEA0183.
Это устройство используется для приема сигнала NMEA0183 от магнитного компаса, последующего усиления и передачи этого сигнала NMEA0183 на различные устройства отображения. Это устройство имеет один вход и несколько терминалов для сопряжения с иными устройствами морского оборудования.
Конвертор USB485 и компьютер.
Блок конвертера USB485 и компьютера выполняет функцию сбора и отображения значений азимута ЦМК и электрического компаса на борту с помощью визуальных графиков во время тестирования. Значение азимута визуально отображается на компьютере с помощью программного обеспечения на языке C#.
ЦМКС имеет следующие соединения.
ЦМКС функционирует аналогично схеме электрического компаса корабля. В ЦМКС имеется цифровое магнитное компасное (ЦМК) устройство - датчик. Устройство ЦМК выполняет измерение магнитного поля Земли, также фиксирует сигнал позиционирования системы ГНСС и обрабатывает данные сигналы для получения уточненного значения азимута. Наконец, ЦМК передает стандартные данные NMEA0183, несущие значение азимута на устройства отображения. Внутри системы имеется буфер сигнала NMEA0183, который соединяет магнитный компас с другими системами корабля и устройствами отображения. В системе есть два устройства отображения: цифровое устройство отображения и репитер гирокомпаса. Эти два устройства так устанавливаются на судне, чтобы позволить операторам удобно наблюдать необходимую информацию.
Если по каким-то причинам навигационная система GPS/ГЛОНАСС не будет работать, то чисто показания магнитного компаса будут передаваться напрямую в репитер.
Таким образом, предложенная цифровая магнитная компасная система пригодна для небольших судов внутреннего каботажа и других условий плавания без условий для оснащения дорогих компасных систем. Названные ИМС для применения в ЦМКС указаны только для примера, могут быть применены и другие.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| УСТРОЙСТВО СОВМЕСТИМОСТИ ИНТЕРФЕЙСОВ | 2017 |
|
RU2663549C1 |
| МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2104489C1 |
| Способ отвода лесосек | 2017 |
|
RU2663280C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2190189C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
Изобретение относится к навигационному приборостроению, а именно к магнитным судовым компасам, и может быть использовано для коррекции показаний магнитного компаса при прохождении заданных маршрутов с дистанционной передачей изображения шкалы курса компаса, например, в пост рулевого и другим потребителям. Цифровая магнитная компасная система содержит цифровой магнитный компас (ЦМК), приемник спутниковых навигационных сигналов GPS/ГЛОНАСС, буферный усилитель, ЖК-индикатор, репитер, источник питания, конвертер и ПК. При этом приемник сигналов GPS/ГЛОНАСС соединен выходом с первым информационным входом ЦМК, выход ЦМК первой сигнальной шиной соединен с входом буферного усилителя и входом конвертера, выход которого соединен с входом ПК. Выход буферного усилителя второй сигнальной шиной соединен с репитером, третьей сигнальной шиной с ЖКИ, а четвертой шиной – с другими потребителями курсовой информации компаса в ходовой рубке. При этом ЦМК содержит микроконтроллер (МК), модуль позиционирования и магнитный модуль, выполненный с возможностью измерения магнитного поля Земли, причем первый информационный вход ЦМК через МК двунаправленной шиной соединен с первым входом модуля позиционирования, со вторым входом которого соединен выход магнитного модуля, а вход которого соединен со вторым информационным входом ЦМК. Технический результат – повышение точности выдерживания заданных курсов на всем пути следования. 1 ил.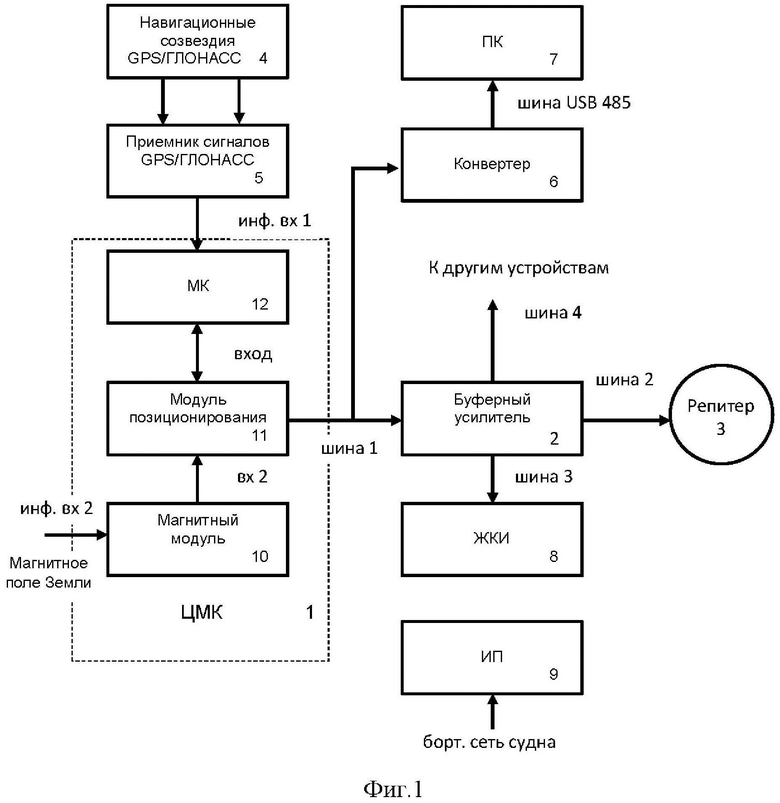
Цифровая магнитная компасная система, характеризующаяся тем, что содержит цифровой магнитный компас (ЦМК), приемник спутниковых навигационных сигналов GPS/ГЛОНАСС, буферный усилитель, ЖК-индикатор, репитер, источник питания, конвертер и персональный компьютер (ПК), при этом приемник сигналов GPS/ГЛОНАСС соединен выходом с первым информационным входом ЦМК, выход ЦМК первой сигнальной шиной соединен с входом буферного усилителя и входом конвертера, выход которого соединен с входом ПК, выход буферного усилителя второй сигнальной шиной соединен с репитером, третьей сигнальной шиной с ЖКИ, а четвертой шиной - с другими потребителями курсовой информации компаса в ходовой рубке, при этом ЦМК содержит микроконтроллер (МК), модуль позиционирования и магнитный модуль, выполненный с возможностью измерения магнитного поля Земли, причем первый информационный вход ЦМК через МК двунаправленной шиной соединен с первым входом модуля позиционирования, со вторым входом которого соединен выход магнитного модуля, а вход которого соединен со вторым информационным входом ЦМК.
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| МАГНИТНЫЙ КОМПАС С ДИСТАНЦИОННОЙ ТЕЛЕМЕТРИЧЕСКОЙ ПЕРЕДАЧЕЙ ИЗОБРАЖЕНИЯ ШКАЛЫ КУРСА | 2010 |
|
RU2441201C1 |
| RU 96101662 A, 10.04.1998 | |||
| US 10215564 B2, 26.02.2019. | |||

