Изобретение относится к электроприводам, а именно к комбинированным средствам управления запорной арматурой, и может быть использовано на трубопроводах при транспортировке нефти, нефтепродуктов и газов, в химической и нефтехимической отраслях.
Известен привод запорно-регулирующей арматуры РЮД, защищенный патентом РФ №2108513, предназначенный для перемещения регулирующих органов в соответствии с командными сигналами автоматических регулирующих и управляющих устройств и оперативного ручного управления. Недостатками данного привода являются: ограниченные эксплуатационные возможности, не позволяющие определять текущее положение вала, непосредственно в месте эксплуатации привода визуально или дистанционно средствами внешних систем автоматического управления, а также не позволяющие (затрудняющие) использовать устройство ручного перемещения при противодействующем крутящем моменте на выходном валу привода более 200 Н*м; недостаточные надежность функционирования и отказоустойчивость при превышении момента (усилия) на выходном валу привода и устройстве ручного перемещения допустимых пределов, а также при превышении угла поворота выходного вала допустимых пределов; большие габаритные размеры, вес и материалоемкость.
Наиболее близким по технической сущности к заявляемому устройству является взрывозащищенный электромеханизм трубопроводной арматуры, защищенный патентом РФ №2228478, предназначенный для управления однооборотными запорными кранами в магистралях газопроводов, нефтепроводов, в системах подачи топлива (природного газа или мазута), а также запорной арматурой для химических цехов тепловых электростанций. Недостатками данного устройства являются: ограниченные эксплуатационные возможности, не позволяющие определять текущее положение вала, непосредственно в месте эксплуатации привода визуально или дистанционно средствами внешних систем автоматического управления, а также не позволяющие (затрудняющие) использовать устройство ручного перемещения при противодействующем крутящем моменте на выходном валу привода более 200 Н*м; недостаточные надежность функционирования и отказоустойчивость при превышении момента (усилия) на выходном валу электромеханизма и ручного привода допустимых пределов, а также при превышении угла поворота выходного вала допустимых пределов.
Задача заявленного изобретения - создание электропривода однооборотного, который позволит расширить эксплуатационные возможности, повысить надежность функционирования и отказоустойчивость.
Задача решается следующим образом.
Вариант 1. Электропривод однооборотный, состоящий из: электродвигателя; необратимой муфты; предварительного редуктора; двухступенчатого планетарного редуктора; выходного вала и устройства ограничения крутящего момента, в который дополнительно введен ручной привод с муфтой ограничения момента, состоящий из ручки, муфты ограничения момента и вала, а также дополнительно введен блок кулачков и микропереключателей, состоящий из кулачков, микропереключателей и вала.
Вариант 2. Отличается от варианта 1 тем, что дополнительно введен визуальный указатель положения выходного вала.
Вариант 3. Отличается от варианта 1 тем, что дополнительно введен визуальный указатель положения выходного вала и потенциометр.
Вариант 4. Отличается от варианта 1 тем, что дополнительно введены визуальный указатель положения выходного вала и датчик тока.
Вариант 5. Отличается от варианта 1 тем, что дополнительно введен роторный переменный дифференциальный трансформатор с цифровым последовательным каналом информационного обмена.
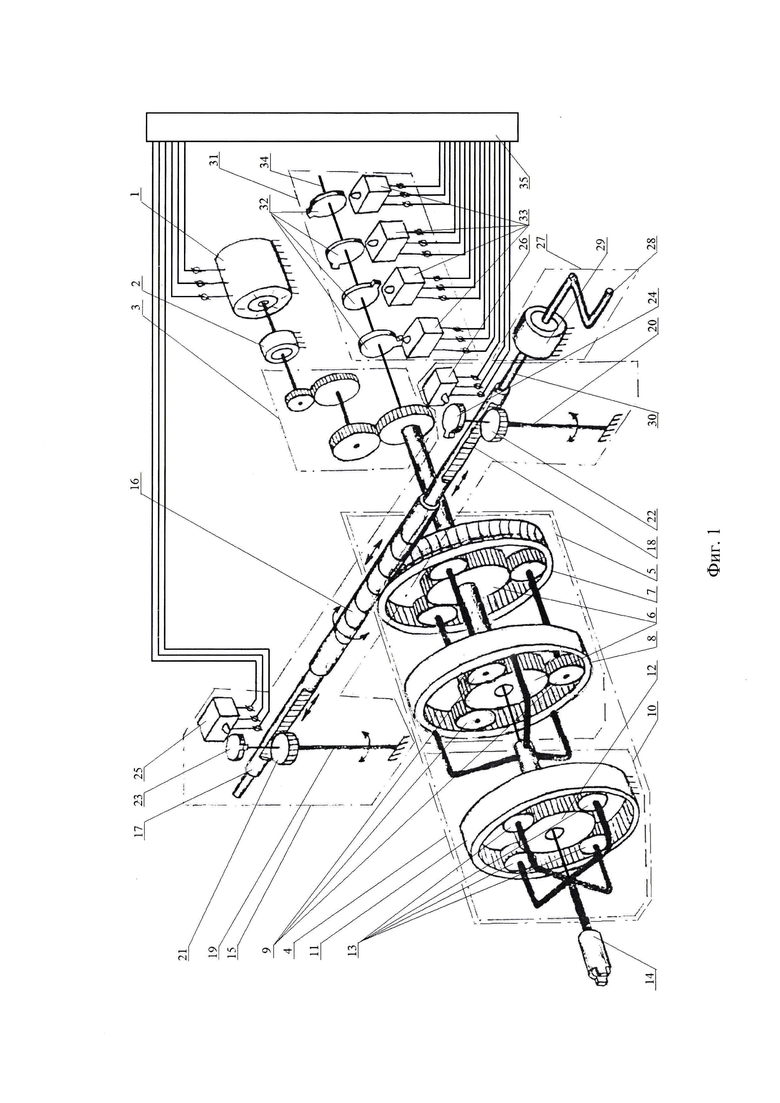
В первом варианте (фиг.1) электропривод однооборотный содержит: электродвигатель 1; необратимую муфту 2; предварительный редуктор 3; двухступенчатый планетарный редуктор 4, первой ступенью которого является планетарная передача типа 3К 5, состоящая из солнечного колеса 6, первого 7 и второго 8 корончатых колес, трех сателлитов 9, а второй ступенью - планетарная передача 10, состоящая из неподвижного корончатого колеса 11, солнечного колеса 12 и четырех сателлитов 13; выходной вал 14; устройство ограничения крутящего момента 15, состоящее из червяка 16, первой 17 и второй 18 реек, первого 19 и второго 20 торсионов, первого 21 и второго 22 зубчатых колес, первого 23 и второго 24 кулачков, первого 25 и второго 26 микропереключателей; ручной привод с муфтой ограничения момента 27, состоящий из ручки 28, муфты ограничения момента 29 и вала 30; блок кулачков и микропереключателей 31, состоящий из кулачков 32, микропереключателей 33 и вала 34. Выходной вал электродвигателя 1 соединен с входом необратимой муфты 2, выход которой через зубчатые колеса предварительного редуктора 3, солнечное колесо 6 и сателлиты 9 первой ступени двухступенчатого планетарного редуктора 4 - планетарной передачи типа 3К 5 соединен с первым 7 и вторым 8 корончатыми колесами первой ступени двухступенчатого планетарного редуктора 4 - планетарной передачи типа 3К 5, причем первое корончатое колесо 7 удерживается от движения червяком 16 из состава устройства ограничения крутящего момента 15, а второе корончатое колесо 8 имеет соединение с солнечным колесом 12 из состава второй ступени двухступенчатого планетарного редуктора 4 - планетарной передачи 10, солнечное колесо 12 из состава второй ступени двухступенчатого планетарного редуктора 4 - планетарной передачи 10 через сателлиты 13 соединено с неподвижным корончатым колесом 11 второй ступени двухступенчатого планетарного редуктора 4 - планетарной передачи 10 и выходным валом 14, выходной вал 14 имеет жесткую механическую связь с валом 34 блока кулачков и микропереключателей 31, червяк 16 устройства ограничения крутящего момента 15 соединен с одной стороны через первую рейку 17 и первое зубчатое колесо 21 с первым торсионом 19 и первым кулачком 23 устройства ограничения крутящего момента 15, а с другой стороны - через вторую рейку 18 и второе зубчатое колесо 22 с вторым торсионом 20 и вторым кулачком 24 устройства ограничения крутящего момента 15, в свою очередь первый кулачок 23 устройства ограничения крутящего момента 15 при достижении определенного угла поворота имеет возможность воздействовать своим выступом на первый микропереключатель 25 устройства ограничения крутящего момента 15, а второй кулачок 24 устройства ограничения крутящего момента 15 при достижении определенного угла поворота имеет возможность воздействовать своим выступом на второй микропереключатель 26 устройства ограничения крутящего момента 15, ручка 28 из состава ручного привода с муфтой ограничения момента 27 соединена через муфту ограничения момента 29 с валом 30 ручного привода с муфтой ограничения момента 27, который в свою очередь имеет жесткую механическую связь с червяком 16 из состава устройства ограничения крутящего момента 15, кулачки 32 блока кулачков и микропереключателей 31 при достижении валом 34 определенных углов поворота имеют возможность воздействовать своими выступами на микропереключатели 33 блока кулачков и микропереключателей 31, электрические входы-выходы электродвигателя 1, первого 25 и второго 26 микропереключателей из состава устройства ограничения крутящего момента 15, микропереключателей 33 из состава блока кулачков и микропереключателей 31 соединены с соответствующими выходами-входами внешней системы электропитания и управления 35.
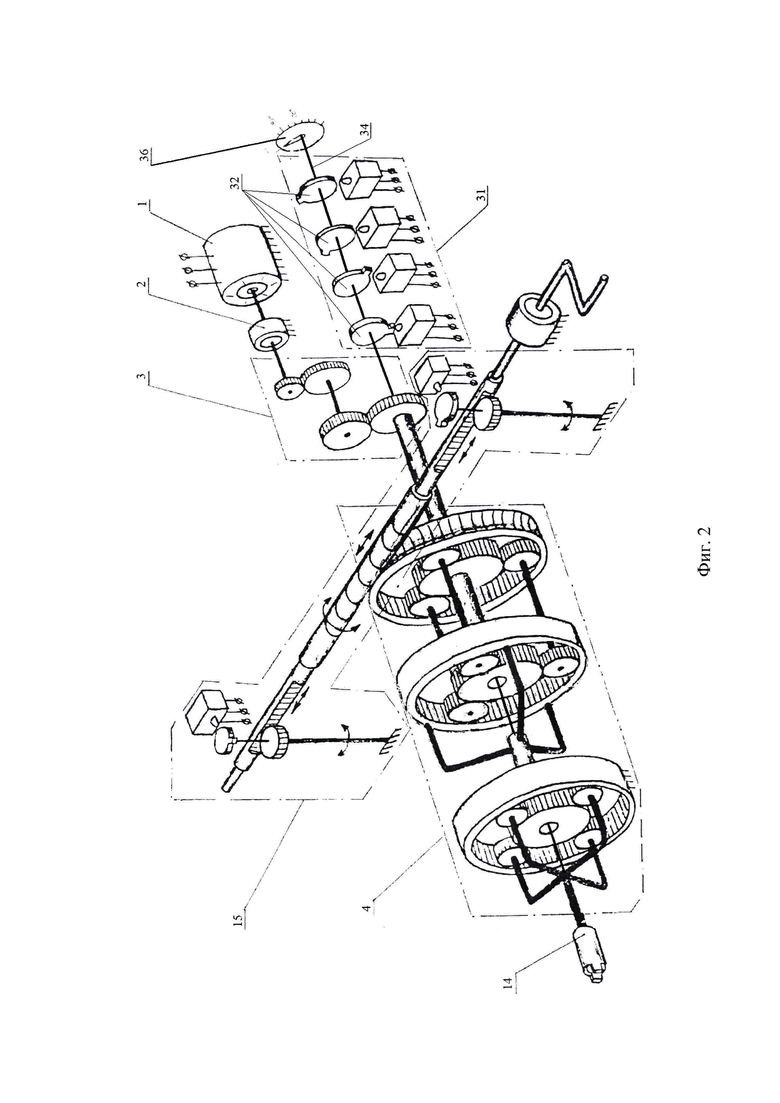
Во втором варианте (фиг.2) дополнительно введен визуальный указатель положения выходного вала 36, где в отличие от варианта 1, вал 34 блока кулачков и микропереключателей 31 соединен с визуальным указателем положения выходного вала 36.
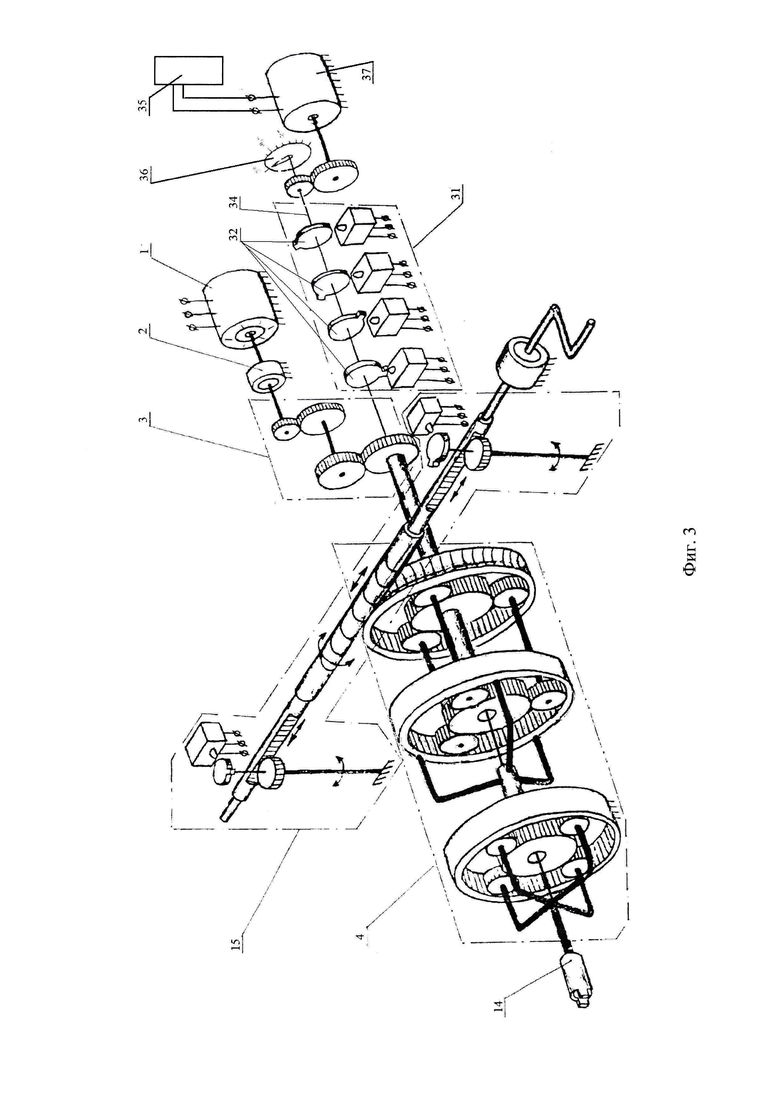
В третьем варианте (фиг.3) дополнительно введен визуальный указатель положения выходного вала 36 и потенциометр 37, где в отличие от варианта 1, вал 34 блока кулачков и микропереключателей 31 соединен с визуальным указателем положения выходного вала 36 и потенциометром 37, электрические входы-выходы потенциометра 37 соединены с соответствующими входами-выходами внешней системы электропитания и управления 35.
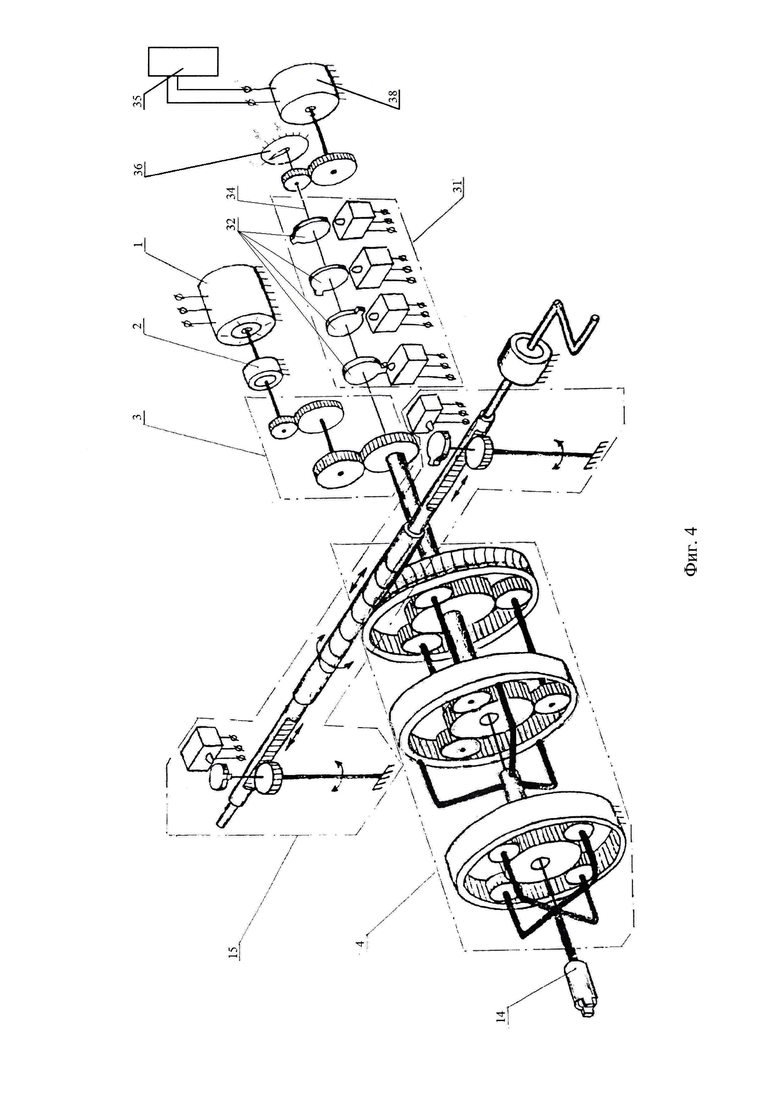
В четвертом варианте (фиг.4) дополнительно введен визуальный указатель положения выходного вала 36 и датчик тока 38, где в отличие от варианта 1, вал 34 блока кулачков и микропереключателей 31 соединен с визуальным указателем положения выходного вала 36 и датчиком тока 38, электрические входы-выходы датчика тока 38 соединены с соответствующими входами-выходами внешней системы электропитания и управления 35.
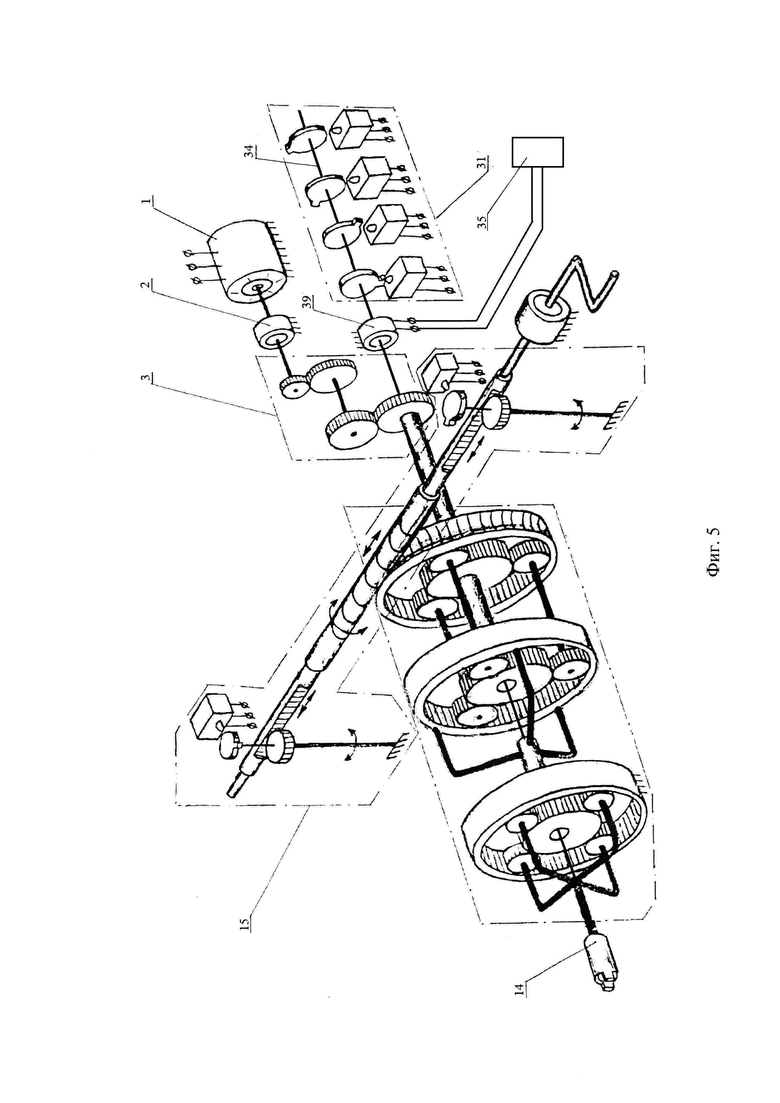
В пятом варианте (фиг.5) дополнительно введен роторный переменный дифференциальный трансформатор с цифровым последовательным каналом информационного обмена 39, где в отличие от варианта 1, на валу 34 блока кулачков и микропереключателей 31 установлен роторный переменный дифференциальный трансформатор с цифровым последовательным каналом информационного обмена 39, электрические и информационные входы-выходы роторного переменного дифференциального трансформатора с цифровым последовательным каналом информационного обмена 39 соединены с соответствующими выходами-входами внешней системы электропитания и управления 35.
Заявляемое изобретение работает следующим образом.
Вариант 1. По сигналам от внешней системы электропитания и управления 35 электродвигатель 1 создает вращательное усилие, которое передается через необратимую муфту 2 и предварительный редуктор 3 на солнечное колесо 6 первой ступени двухступенчатого планетарного редуктора 4. Первое корончатое колесо 7 планетарной передачи типа 3К 5 удерживается от движения червяком 16 из состава устройства ограничения крутящего момента 15, поэтому вращение солнечного колеса 6 первой ступени двухступенчатого планетарного редуктора 4 передается через сателлиты 9 и второе корончатое колесо 8 на солнечное колесо 12 второй ступени двухступенчатого планетарного редуктора 4. Сателлиты 13 расположены на водиле неподвижного корончатого колеса 11 второй ступени двухступенчатого планетарного редуктора 4 и при отсутствии противодействующего момента на выходном валу 14 передают вращение солнечного колеса 12 второй ступени двухступенчатого планетарного редуктора 4 на выходной вал 14, который начинает вращаться в направлении определяемом электродвигателем 1, при этом элементы устройства ограничения крутящего момента 15 находятся в неподвижном - исходном состоянии.
При появлении на выходном валу 14 противодействующего вращающего момента, который по величине превышает предварительно заданное значение, происходит остановка углового перемещения сателлитов 13 и солнечного колеса 12 второй ступени двухступенчатого планетарного редуктора 4. При этом первое корончатое колесо 7 первой ступени двухступенчатого планетарного редуктора 4 проворачивается под действием вращательного усилия, создаваемого электродвигателем 1 и передаваемого через необратимую муфту 2 и предварительный редуктор 3 на солнечное колесо 6 и сателлиты 9 первой ступени двухступенчатого планетарного редуктора 4. Первое корончатое колесо 7 первой ступени двухступенчатого планетарного редуктора 4 создает усилие в осевом направлении на червяк 16 из состава устройства ограничения крутящего момента 15, направленное вдоль оси вала 30. Направление этого усилия зависит от направления противодействующего вращающего момента на выходном валу 14.
Если червяк 16, перемещаясь вдоль оси вала 30, перемещает первую рейку 17, которая через первое зубчатое колесо 21 начинает закручивать первый торсион 19 и вместе с ним поворачивать первый кулачок 23, то со стороны первого торсиона 19 возникает момент, противодействующий закручиванию торсиона, который через первое зубчатое колесо 21 передается в виде усилия на первую рейку 17.
Если червяк 16, перемещаясь вдоль оси вала 30, перемещает вторую рейку 18, которая через второе зубчатое колесо 22 начинает закручивать второй торсион 20 и вместе с ним поворачивать второй кулачок 24, то со стороны второго торсиона 20 возникает момент, противодействующий закручиванию торсиона, который через второе зубчатое колесо 22 передается в виде усилия на вторую рейку 18.
Усилия, передаваемые на первую 17 или вторую 18 рейки со стороны соответствующих торсионов 19 или 20 всегда направлены на возвращение первой 17 или второй 18 реек и червяка 16 к исходному положению.
При противодействующем моменте на выходном валу 14, не превышающем по величине предварительно заданное значение, усилие, приложенное со стороны первого корончатого колеса 7 первой ступени двухступенчатого планетарного редуктора 4 к червяку 16, уравновешивается противоусилием закрученного торсиона - первого 19 или второго 20, приложенного к червяку 16 через соответствующие зубчатое колесо и рейку - первое зубчатое колесо 21 и первую рейку 17 или второе зубчатое колесо 22 и вторую рейку 18.
Величина перемещения червяка 16, первой 17 или второй 18 рейки от своего исходного положения пропорциональна величине противодействующего момента на выходном валу 14.
Если противодействующий момент на выходном валу 14 не превышает максимально допустимого значения, то величина перемещения червяка 16, первой 17 или второй 18 рейки, а также закручивание соответствующего торсиона - первого 19 или второго 20, будут такими, что угол поворота соответствующего кулачка - первого 23 или второго 24, не достигнет значения, при котором срабатывает соответствующий микропереключатель - первый 25 или второй 26.
При достижении противодействующим моментом на выходном валу 14 максимально допустимого значения перемещение червяка 16, первой 17 или второй 18 рейки, а также закручивание соответствующего торсиона - первого 19 или второго 20, будут такими, что соответствующий кулачок - первый 23 или второй 24, своим выступом нажимает кнопку соответствующего микропереключателя - первого 25 или второго 26, что приводит к формированию и передаче во внешнюю систему электропитания и управления 35 сигнала на разрыв цепей питания и останов электродвигателя 1.
При уменьшении момента на выходном валу 14 соответствующий торсион - первый 19 или второй 20, соответствующий кулачок - первый 23 или второй 24, соответствующая рейка - первая 17 или вторая 18, червяк 16 вращаются (перемещаются) в направлении к исходному положению. В исходном положении они находятся только при отсутствии противодействующего момента на выходном валу 14.
Необратимая муфта 2 реализует передачу вращательного усилия только в направлении от электродвигателя 1 к предварительному редуктору 3, а также обеспечивает запрет на произвольное перемещение выходного вала 14 и удержание выходного вала 14 от движения при обесточенном электродвигателе 1.
Выходной вал 14 жестко связан с валом 34 блока кулачков и микропереключателей 31, проходящим через отверстия в солнечном колесе 12 и в солнечном колесе 6 двухступенчатого планетарного редуктора 4, поэтому поворот выходного вала 14 сопровождается поворотом кулачков 32 в блоке кулачков и микропереключателей 31. При достижении определенных положений кулачки 32 нажимают на кнопки соответствующих микропереключателей 33, сигнализируя о текущем положении выходного вала 14, либо формируя и передавая во внешнюю систему электропитания и управления 35 сигналы на разрыв цепей питания и останов электродвигателя 1.
В случае возникновения необходимости в повороте выходного вала 14 при обесточенном электродвигателе 1, силами обслуживающего персонала, осуществляющего эксплуатацию электропривода, создается необходимое вращательное усилие на ручке 28 из состава ручного привода с муфтой ограничения момента 27, которое передается через муфту ограничения момента 29 и вал 30 на червяк 16, через первое корончатое колесо 7, сателлиты 9 и второе корончатое колесо 8 планетарной передачи типа 3К 5, солнечное колесо 12 и сателлиты 13 планетарной передачи 10 на выходной вал 14, который начинает вращаться в направлении определяемом направлением движения ручки 28.
При превышении на выходном валу 14 предельно допустимого значения вращающего момента, создаваемого вращением ручки 28 из состава ручного привода с муфтой ограничения момента 27, муфта ограничения момента 29 пробуксовывает.
Вариант 2. Поворот выходного вала 14 сопровождается поворотом кулачков 32 в блоке кулачков и микропереключателей 31 и визуального указателя положения выходного вала 36. Визуальный указатель положения выходного вала 36 показывает обслуживающему персоналу, осуществляющему эксплуатацию электропривода, текущее значение угла поворота выходного вала 14 посредством стрелочного указателя.
Вариант 3. Поворот выходного вала 14 сопровождается поворотом кулачков 32 в блоке кулачков и микропереключателей 31 и визуального указателя положения выходного вала 36, а также передачей вращательного движения на потенциометр 37. Визуальный указатель положения выходного вала 36 показывает обслуживающему персоналу, осуществляющему эксплуатацию электропривода, текущее значение угла поворота выходного вала 14 посредством стрелочного указателя. Потенциометр 37, изменяя свое сопротивление, формирует во внешнюю систему электропитания и управления 35 информацию о текущем значении угла поворота выходного вала 14.
Вариант 4. Поворот выходного вала 14 сопровождается поворотом кулачков 32 в блоке кулачков и микропереключателей 31 и визуального указателя положения выходного вала 36, а также передачей вращательного движения на датчик тока 38. Визуальный указатель положения выходного вала 36 показывает обслуживающему персоналу, осуществляющему эксплуатацию электропривода, текущее значение угла поворота выходного вала 14. Датчик тока 38, изменяя силу тока, формирует во внешнюю систему электропитания и управления 35 информацию о текущем значении угла поворота выходного вала 14.
Вариант 5. При повороте выходного вала 14 и связанного с ним вала 34 блока кулачков и микропереключателей 31 роторный переменный дифференциальный трансформатор с цифровым последовательным каналом информационного обмена 39 формирует и передает во внешнюю систему электропитания и управления 35 информация о текущем угловом положении выходного вала 14. Информация о текущем угловом положении выходного вала 14 передается во внешнюю систему электропитания и управления 35 в виде последовательного цифрового кода. Погрешность измерения положения выходного вала 14 роторным переменным дифференциальным трансформатором с цифровым последовательным каналом информационного обмена 39 зависит от объекта эксплуатации электропривода однооборотного и параметров внешней системы электропитания и управления 35.
Таким образом, предлагаемые технические решения позволяют определять непосредственно в месте эксплуатации электропривода текущее положение выходного вала, благодаря визуальному указателю положения выходного вала, а по сигналам от микропереключателей из состава блока кулачков и микропереключателей и/или потенциометра, и/или датчика тока, и/или роторного переменного дифференциального трансформатора с цифровым последовательным каналом информационного обмена определять текущее положение выходного вала дистанционно средствами внешних систем автоматического управления, что расширяет эксплуатационные возможности данного устройства. А за счет использования муфты ограничения момента обеспечивается защита предлагаемого устройства от разрушения при прикладывании к ручному приводу со стороны обслуживающего персонала моментов/усилий, превышающих допустимые пределы, что повышает надежность функционирования и отказоустойчивость электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ОДНООБОРОТНЫЙ | 2021 |
|
RU2763381C1 |
| ЭЛЕКТРОПРИВОД ОДНООБОРОТНЫЙ | 2021 |
|
RU2775947C1 |
| ЭЛЕКТРОПРИВОД ОДНООБОРОТНЫЙ | 2021 |
|
RU2778419C1 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ЭЛЕКТРОМЕХАНИЗМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2002 |
|
RU2228478C9 |
| ПРИВОДНОЙ ЭЛЕКТРОМЕХАНИЗМ | 2003 |
|
RU2277195C2 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) И ПРЕДОХРАНИТЕЛЬНАЯ МУФТА К НЕМУ | 2002 |
|
RU2222860C1 |
| Усилитель рулевого управления с электрическим приводом | 2019 |
|
RU2721452C1 |
| ВЕДУЩИЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2460651C1 |
Изобретение относится к электроприводу однооборотный, а именно к комбинированным средствам управления запорной арматурой, и может быть использован на трубопроводах при транспортировке нефти, нефтепродуктов и газов, в химической и нефтехимической отраслях. Технический результат - повышение надежности функционирования и отказоустойчивости с возможностью определения непосредственно в месте эксплуатации электропривода текущее положение выходного вала. Электропривод содержит: электродвигатель; необратимую муфту; предварительный редуктор; двухступенчатый планетарный редуктор; выходной вал; устройство ограничения крутящего момента. Также описаны частные случаи выполнения электропривода. 4 з.п. ф-лы, 5 ил.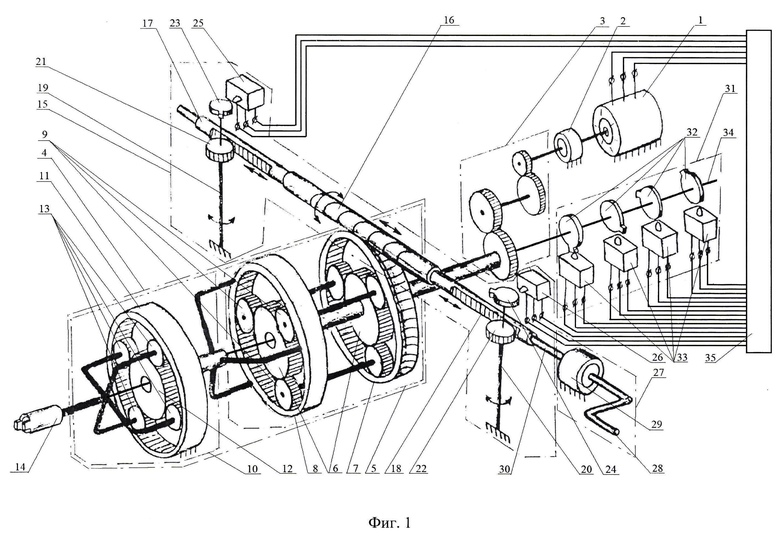
1. Электропривод однооборотный, содержащий: электродвигатель; необратимую муфту; предварительный редуктор; двухступенчатый планетарный редуктор, первой ступенью которого является планетарная передача типа 3К, состоящая из солнечного колеса, первого и второго корончатых колес, трех сателлитов, а второй ступенью - планетарная передача, состоящая из неподвижного корончатого колеса, солнечного колеса и четырех сателлитов; выходной вал; устройство ограничения крутящего момента, состоящее из червяка, первой и второй реек, первого и второго торсионов, первого и второго зубчатых колес, первого и второго кулачков, первого и второго микропереключателей, отличающийся тем, что дополнительно содержит ручной привод с муфтой ограничения момента, состоящий из ручки, муфты ограничения момента и вала, а также дополнительно содержит блок кулачков и микропереключателей, состоящий из кулачков, микропереключателей и вала, где выходной вал электродвигателя соединен с входом необратимой муфты, выход которой через зубчатые колеса предварительного редуктора, солнечное колесо и сателлиты первой ступени двухступенчатого планетарного редуктора - планетарной передачи типа 3К соединен с первым и вторым корончатыми колесами первой ступени двухступенчатого планетарного редуктора - планетарной передачи типа 3К, причем первое корончатое колесо удерживается от вращения червяком из состава устройства ограничения крутящего момента, а второе корончатое колесо имеет соединение с солнечным колесом из состава второй ступени двухступенчатого планетарного редуктора - планетарной передачи, солнечное колесо из состава второй ступени двухступенчатого планетарного редуктора - планетарной передачи через сателлиты соединено с неподвижным корончатым колесом второй ступени двухступенчатого планетарного редуктора - планетарной передачи и выходным валом, выходной вал имеет жесткую механическую связь с валом блока кулачков и микропереключателей, червяк устройства ограничения крутящего момента соединен с одной стороны через первую рейку и первое зубчатое колесо с первым торсионом и первым кулачком устройства ограничения крутящего момента, а с другой стороны - через вторую рейку и второе зубчатое колесо со вторым торсионом и вторым кулачком устройства ограничения крутящего момента, в свою очередь, первый кулачок устройства ограничения крутящего момента при достижении определенного угла поворота имеет возможность воздействовать своим выступом на первый микропереключатель устройства ограничения крутящего момента, а второй кулачок устройства ограничения крутящего момента при достижении определенного угла поворота имеет возможность воздействовать своим выступом на второй микропереключатель устройства ограничения крутящего момента, ручка из состава ручного привода с муфтой ограничения момента соединена через муфту ограничения момента с валом ручного привода с муфтой ограничения момента, который, в свою очередь, имеет жесткую механическую связь с червяком из состава устройства ограничения крутящего момента, кулачки блока кулачков и микропереключателей при достижении валом определенных углов поворота имеют возможность воздействовать своими выступами на микропереключатели блока кулачков и микропереключателей, электрические входы-выходы электродвигателя, первого и второго микропереключателей из состава устройства ограничения крутящего момента, микропереключателей из состава блока кулачков и микропереключателей соединены с соответствующими выходами-входами внешней системы электропитания и управления.
2. Электропривод однооборотный по п. 1, отличающийся тем, что в устройство дополнительно введен визуальный указатель положения выходного вала, где вал блока кулачков и микропереключателей соединен с визуальным указателем положения выходного вала.
3. Электропривод однооборотный по п. 1, отличающийся тем, что в устройство дополнительно введен визуальный указатель положения выходного вала и потенциометр, где вал блока кулачков и микропереключателей соединен с визуальным указателем положения выходного вала и потенциометром, электрические входы-выходы потенциометра соединены с соответствующими входами-выходами внешней системы электропитания и управления.
4. Электропривод однооборотный по п. 1, отличающийся тем, что в устройство дополнительно введен визуальный указатель положения выходного вала и датчик тока, где вал блока кулачков и микропереключателей соединен с визуальным указателем положения выходного вала и датчиком тока, электрические входы-выходы датчика тока соединены с соответствующими входами-выходами внешней системы электропитания и управления.
5. Электропривод однооборотный по п. 1, отличающийся тем, что в устройство дополнительно введен роторный переменный дифференциальный трансформатор с цифровым последовательным каналом информационного обмена, где на валу блока кулачков и микропереключателей установлен роторный переменный дифференциальный трансформатор с цифровым последовательным каналом информационного обмена, электрические и информационные входы-выходы роторного переменного дифференциального трансформатора с цифровым последовательным каналом информационного обмена соединены с соответствующими выходами-входами внешней системы электропитания и управления.
| ВЗРЫВОЗАЩИЩЕННЫЙ ЭЛЕКТРОМЕХАНИЗМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2002 |
|
RU2228478C9 |
| ПРИВОД ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ РЮД | 1996 |
|
RU2108513C1 |
| ПРЕРЫВИСТЫЙ ШЛИФОВАЛЬНЫЙ КРУГ | 1998 |
|
RU2153974C2 |
| US 5836567 A1, 17.11.1998 | |||
| DE 4239947 C1, 04.11.1993. | |||

