Изобретение относится к электроприводам, а именно к комбинированным средствам управления запорной арматурой, и может быть использовано на трубопроводах при транспортировке нефти, нефтепродуктов и газов, в химической и нефтехимической отраслях.
Известен привод запорно-регулирующей арматуры РЮД, защищенный патентом РФ №2108513, предназначенный для перемещения регулирующих органов в соответствии с командными сигналами автоматических регулирующих и управляющих устройств и оперативного ручного управления. Недостатками данного привода являются: ограниченные эксплуатационные возможности, не позволяющие определять текущее положение вала, непосредственно в месте эксплуатации привода визуально или дистанционно средствами внешних систем автоматического управления, а также не позволяющие (затрудняющие) использовать устройство ручного перемещения при противодействующем крутящем моменте на выходном валу привода более 200 Н*м; недостаточные надежность функционирования и отказоустойчивость при превышении момента (усилия) на выходном валу привода и устройстве ручного перемещения допустимых пределов, а также при превышении угла поворота выходного вала допустимых пределов; большие габаритные размеры, вес и материалоемкость.
Наиболее близким по технической сущности к заявляемому устройству является взрывозащищенный электромеханизм трубопроводной арматуры, защищенный патентом РФ №2228478, предназначенный для управления однооборотными запорными кранами в магистралях газопроводов, нефтепроводов, в системах подачи топлива (природного газа или мазута), а также запорной арматурой для химических цехов тепловых электростанций. Недостатками данного устройства являются: ограниченные эксплуатационные возможности, не позволяющие определять текущее положение вала, непосредственно в месте эксплуатации привода визуально или дистанционно средствами внешних систем автоматического управления, а также не позволяющие (затрудняющие) использовать устройство ручного перемещения при противодействующем крутящем моменте на выходном валу привода более 200 Н*м; недостаточные надежность функционирования и отказоустойчивость при превышении момента (усилия) на выходном валу электромеханизма и ручного привода допустимых пределов, а также при превышении угла поворота выходного вала допустимых пределов.
Задача заявленного изобретения - создание электропривода однооборотного, который позволит расширить эксплуатационные возможности, повысить надежность функционирования и отказоустойчивость.
Задача решается следующим образом.
Электропривод однооборотный, состоящий из электродвигателя, предварительного редуктора, двухступенчатого планетарного редуктора, выходного вала, в который дополнительно введены: фрикционная электромагнитная муфта; устройство ограничения крутящего момента, состоящее из червяка, первой и второй реек, первого и второго зубчатых колес, первого и второго силовых рычагов и тензометрического датчика; ручной привод с муфтой ограничения момента, состоящий из ручки, муфты ограничения момента и вала; цифровой датчик положения выходного вала; блок коммутации; блок управления и цифровой канал информационного обмена с системой управления верхнего уровня.
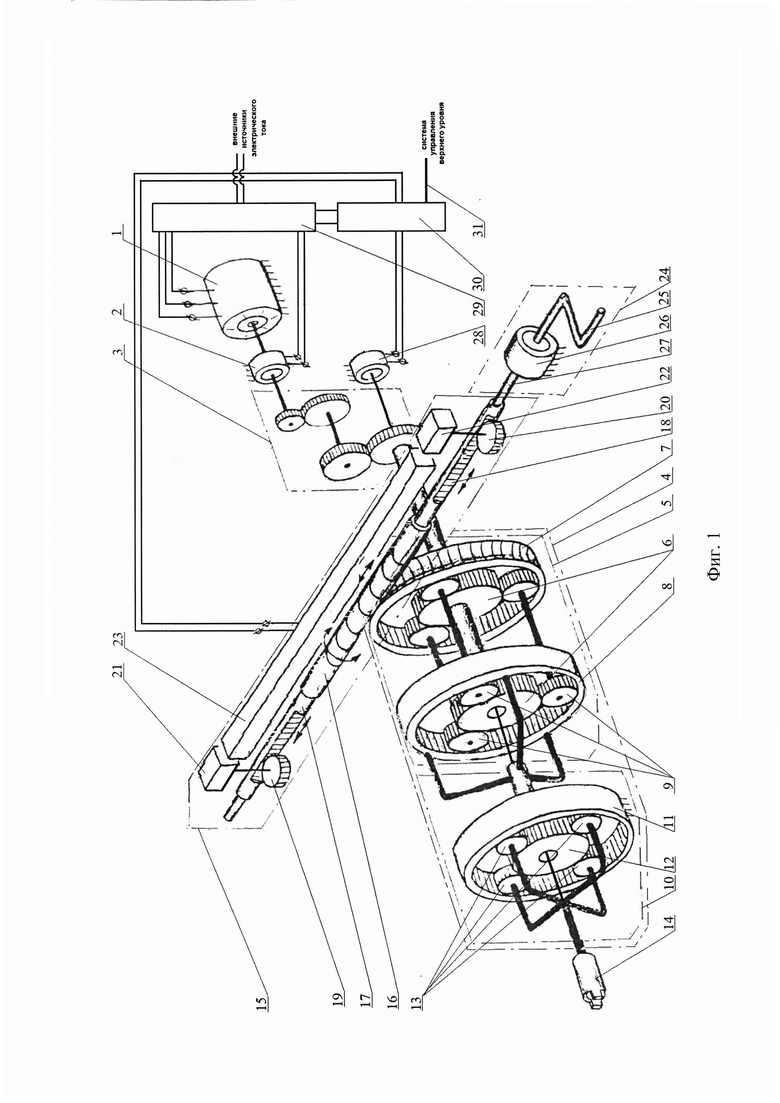
Кинематическая схема предлагаемого устройства представлена на фиг. 1.
Электропривод однооборотный содержит: электродвигатель 1; фрикционную электромагнитную муфту 2; предварительный редуктор 3; двухступенчатый планетарный редуктор 4, первой ступенью которого является планетарная передача типа 3К 5, состоящая из солнечного колеса 6, первого 7 и второго 8 корончатых колес, трех сателлитов 9, а второй ступенью - планетарная передача 10, состоящая из неподвижного корончатого колеса 11, солнечного колеса 12 и четырех сателлитов 13; выходной вал 14; устройство ограничения крутящего момента 15, состоящее из червяка 16, первой 17 и второй 18 реек, первого 19 и второго 20 зубчатых колес, первого 21 и второго 22 силовых рычагов, тензометрического датчика 23; ручной привод с муфтой ограничения момента 24, состоящий из ручки 25, муфты ограничения момента 26 и вала 27; цифровой датчик положения выходного вала 28; блок коммутации 29; блок управления 30 и цифровой канал информационного обмена с системой управления верхнего уровня 31. Выходной вал электродвигателя 1 соединен с входом фрикционной электромагнитной муфты 2, выход которой через зубчатые колеса предварительного редуктора 3, солнечное колесо 6 и сателлиты 9 первой ступени двухступенчатого планетарного редуктора 4 - планетарной передачи типа 3К 5, соединен с первым 7 и вторым 8 корончатыми колесами первой ступени двухступенчатого планетарного редуктора 4, причем первое корончатое колесо 7 удерживается от вращения червяком 16, а второе корончатое колесо 8 имеет соединение с солнечным колесом 12, солнечное колесо 12 через сателлиты 13 соединено с неподвижным корончатым колесом 11 второй ступени двухступенчатого планетарного редуктора и выходным валом 14, при этом выходной вал 14 имеет жесткую механическую связь с валом цифрового датчика положения выходного вала 28. Червяк 16 соединен с одной стороны через первую рейку 17 и первое зубчатое колесо 19 с первым силовым рычагом 21 устройства ограничения крутящего момента 15, а с другой стороны - через вторую рейку 18 и второе зубчатое колесо 20 с вторым силовым рычагом 22, где в свою очередь первый силовой рычаг 21 при достижении определенного угла поворота имеет возможность воздействовать своими гранями на тензометрический датчик 23, а второй силовой рычаг 22 при достижении определенного угла поворота имеет возможность воздействовать своими гранями на тензометрический датчик 23. Ручка 25 соединена через муфту ограничения момента 26 с валом 27, который в свою очередь имеет жесткую механическую связь с червяком 16. Электрические входы-выходы электродвигателя 1 и фрикционной электромагнитной муфты 2 соединены с соответствующими выходами-входами блока коммутации 29, который в свою очередь имеет электрические связи с блоком управления 30 и внешними источниками электрического тока. Электрические входы-выходы тензометрического датчика 23 и цифрового датчика положения выходного вала 28 соединены с соответствующими выходами-входами блока управления 30. Блок управления 30 через цифровой канал информационного обмена с системой управления верхнего уровня 31 связан с системой управления верхнего уровня, которая осуществляет дистанционное управление электроприводом однооборотным.
Заявляемое изобретение работает следующим образом.
От внешних источников электрического тока выполняется подача электроэнергии в блок коммутации 29 и далее в блок управления 30.
В этот момент происходит следующее:
- в блоке управления 30 происходит инициализация предустановленного системного и функционального программного обеспечения;
- по командам от блока управления 30 через цифровой канал информационного обмена с системой управления верхнего уровня 31 происходит организация взаимодействия электропривода однооборотного с системой управления верхнего уровня;
- по сигналам, поступающим в блок управления 30 через цифровой канал информационного обмена с системой управления верхнего уровня 31 от системы управления верхнего уровня, а также по командам, формируемым блоком управления 30, происходит автоматическое тестирование и подготовка к работе аппаратных и программных средств электропривода однооборотного: электродвигателя 1, фрикционной электромагнитной муфты 2, тензометрического датчика 23, цифрового датчика положения выходного вала 28, блока коммутации 29 и блока управления 30.
Блок управления 30 по сигналам от системы управления верхнего уровня, поступающим через цифровой канал информационного обмена с системой управления верхнего уровня 31, формирует электрические сигналы управления на блок коммутации 29. Блок коммутации 29 осуществляет коммутацию электрических цепей, обеспечивая передачу электрической энергии от внешних источников электрического тока в электродвигатель 1 и фрикционную электромагнитную муфту 2. Электродвигатель 1 создает вращательное усилие, которое передается через фрикционную электромагнитную муфту 2 и предварительный редуктор 3 на солнечное колесо 6 первой ступени двухступенчатого планетарного редуктора 4. Первое корончатое колесо 7 планетарной передачи типа 3К 5 удерживается от вращения червяком 16, поэтому вращение солнечного колеса 6 первой ступени двухступенчатого планетарного редуктора 4 передается через сателлиты 9 и второе корончатое колесо 8 на солнечное колесо 12 второй ступени двухступенчатого планетарного редуктора 4. Сателлиты 13, расположенные на водиле, передают движение на неподвижное корончатое колесо 11 второй ступени двухступенчатого планетарного редуктора 4 и при отсутствии противодействующего момента на выходном валу 14 передают вращение солнечного колеса 12 на выходной вал 14, который начинает вращаться в направлении определяемом электродвигателем 1, при этом элементы устройства ограничения крутящего момента 15 находятся в неподвижном - исходном состоянии.
При появлении на выходном валу 14 противодействующего вращающего момента, который по величине превышает предварительно заданное значение, происходит остановка углового перемещения сателлитов 13 и солнечного колеса 12. При этом первое корончатое колесо 7 первой ступени двухступенчатого планетарного редуктора 4 проворачивается под действием вращательного усилия, создаваемого электродвигателем 1 и передаваемого через фрикционную электромагнитную муфту 2 и предварительный редуктор 3 на солнечное колесо 6 и сателлиты 9 первой ступени двухступенчатого планетарного редуктора 4. Первое корончатое колесо 7 первой ступени двухступенчатого планетарного редуктора 4 создает усилие в осевом направлении на червяк 16 из состава устройства ограничения крутящего момента 15, направленное вдоль оси вала 27. Направление этого усилия зависит от направления противодействующего вращающего момента на выходном валу 14.
Если червяк 16, перемещаясь вдоль оси вала 27, перемещает первую рейку 17, то через первое зубчатое колесо 19 первый силовой рычаг 21 воздействует своими гранями на тензометрический датчик 23, создавая усилие сжатия.
Если червяк 16, перемещаясь вдоль оси вала 27, перемещает вторую рейку 18, то через второе зубчатое колесо 20 второй силовой рычаг 22 своими гранями воздействует на тензометрический датчик 23, создавая усилие сжатия.
Усилие сжатия тензометрического датчика 23 прямо пропорционально перемещению червяка 16, которое зависит от противодействующего момента на выходном валу 14.
Электрический сигнал с тензометрического датчика 23 поступает в блок управления 30, где он пересчитывается в фактическое значение крутящего момента на выходном валу 14. Значение крутящего момента на выходном валу 14 в виде цифрового кода по цифровому каналу информационного обмена с системой управления верхнего уровня 31 передается в систему управления верхнего уровня. При достижении на выходном валу 14 крутящего момента, соответствующего заданному пороговому значению номинального момента, система управления верхнего уровня через цифровой канал информационного обмена с системой управления верхнего уровня 31 выдает команду на остановку электродвигателя 1. Команда на остановку электродвигателя 1 из блока управления 30 через блок коммутации 29 передается на электродвигатель 1. При уменьшении момента на выходном валу 14, упругие свойства тензометрического датчика 23 возвращают первую рейку 17 или вторую рейку 18 и червяк 16 в исходное положение.
Величина перемещения червяка 16, первой 17 или второй 18 рейки от своего исходного положения пропорциональна величине противодействующего момента на выходном валу 14.
Фрикционная электромагнитная муфта 2 реализует передачу вращения только в направлении от электродвигателя 1 к предварительному редуктору 3, а также обеспечивает запрет на произвольное вращение выходного вала 14 и удержание выходного вала 14 от вращения при обесточенном электродвигателе 1. Управление фрикционной электромагнитной муфтой 2 осуществляется по сигналам от блока управления 30, передаваемым через блок коммутации 29.
Выходной вал 14 жестко связан с валом цифрового датчика положения выходного вала 28, проходящим через отверстия в солнечном колесе 12 и в солнечном колесе 6 двухступенчатого планетарного редуктора 4, поэтому поворот выходного вала 14 сопровождается поворотом вала цифрового датчика положения выходного вала 28. В зависимости от угла поворота вала в цифровом датчике положения выходного вала 28 формируется цифровой код с информацией о проценте открытия или закрытия электропривода, которая через блок управления 30 по цифровому каналу информационного обмена с системой управления верхнего уровня 31 передается в систему управления верхнего уровня.
В случае возникновения необходимости в повороте выходного вала 14 при обесточенном электродвигателе 1, силами обслуживающего персонала, осуществляющего эксплуатацию электропривода, создается необходимое вращательное усилие на ручке 25 из состава ручного привода с муфтой ограничения момента 24, которое передается через муфту ограничения момента 26 и вал 27 на червяк 16, через первое корончатое колесо 7, сателлиты 9 и второе корончатое колесо 8 планетарной передачи типа 3К 5, солнечное колесо 12 и сателлиты 13 планетарной передачи 10 на выходной вал 14, который начинает вращаться в направлении, определяемом направлением движения ручки 25.
При превышении на выходном валу 14 предельно допустимого значения вращающего момента, создаваемого вращением ручки 25 из состава ручного привода с муфтой ограничения момента 24, муфта ограничения момента 26 пробуксовывает.
Таким образом, предлагаемое техническое решение, благодаря сигналам от цифрового датчика положения выходного вала, позволяет дистанционно определять текущее положение выходного вала средствами внешних систем автоматического управления, а благодаря блоку коммутации, блоку управления и цифровому каналу информационного обмена с системой управления верхнего уровня, позволяет обеспечить дистанционное управление средствами внешних систем автоматического управления положением выходного вала, в том числе при превышении угла поворота выходного вала допустимых пределов, что расширяет эксплуатационные возможности электропривода. За счет использования в данном изобретении муфты ограничения момента обеспечивается защита электропривода от разрушения в момент прикладывания к ручному приводу со стороны обслуживающего персонала моментов/усилий превышающих допустимые пределы, а за счет использования цифрового датчика положения выходного вала и тензометрического датчика обеспечивается защита электропривода от разрушения из-за превышения крутящего момента и диапазона допустимых положений на выходном валу, что повышает надежность функционирования и отказоустойчивость электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ОДНООБОРОТНЫЙ | 2021 |
|
RU2770080C1 |
| ЭЛЕКТРОПРИВОД ОДНООБОРОТНЫЙ | 2021 |
|
RU2775947C1 |
| ЭЛЕКТРОПРИВОД ОДНООБОРОТНЫЙ | 2021 |
|
RU2763381C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| Усилитель рулевого управления с электрическим приводом | 2019 |
|
RU2721452C1 |
| Электроусилитель рулевого управления | 2019 |
|
RU2725016C1 |
| ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) И ПРЕДОХРАНИТЕЛЬНАЯ МУФТА К НЕМУ | 2002 |
|
RU2222860C1 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ЭЛЕКТРОМЕХАНИЗМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2002 |
|
RU2228478C9 |
| Электропривод трубопроводной арматуры с ручным дублером | 2024 |
|
RU2829243C1 |
Электропривод однооборотный относится к области электроприводов, а именно к комбинированным средствам управления запорной арматурой, и может быть использован на трубопроводах при транспортировке нефти, нефтепродуктов и газов, в химической и нефтехимической отраслях. Технический результат - повышение надежности функционирования и отказоустойчивости, а также расширение эксплуатационных возможностей, достигается тем, что в устройство, содержащее электродвигатель 1, предварительный редуктор 3, двухступенчатый планетарный редуктор 4, выходной вал 14, дополнительно введены фрикционная электромагнитная муфта 7, устройство ограничения крутящего момента 15, ручной привод с муфтой ограничения момента 24, цифровой датчик положения выходного вала 28, блок коммутации 29, блок управления и цифровой канал информационного обмена с системой управления верхнего уровня 31. 1 ил.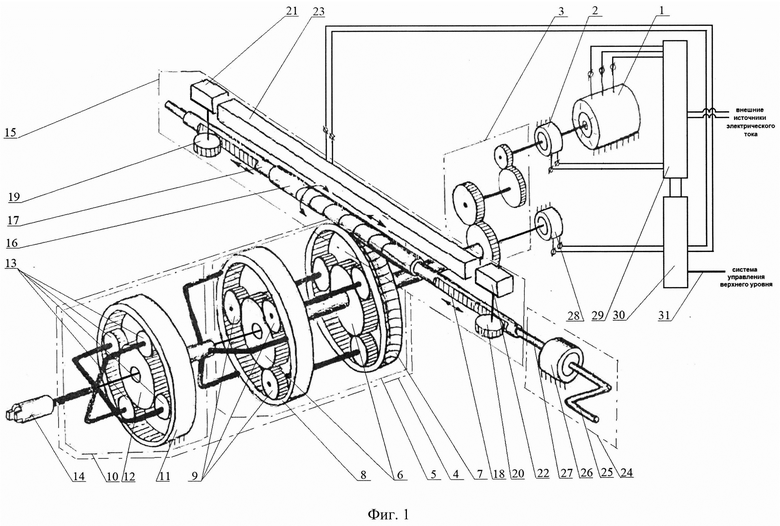
Электропривод однооборотный, содержащий: электродвигатель; предварительный редуктор; двухступенчатый планетарный редуктор, первой ступенью которого является планетарная передача типа 3К, состоящая из солнечного колеса, первого и второго корончатых колес, трех сателлитов, а второй ступенью - планетарная передача, состоящая из неподвижного корончатого колеса, солнечного колеса и четырех сателлитов; выходной вал, отличающийся тем, что дополнительно содержит фрикционную электромагнитную муфту; устройство ограничения крутящего момента, состоящее из червяка, первой и второй реек, первого и второго зубчатых колес, первого и второго силовых рычагов и тензометрического датчика; ручной привод с муфтой ограничения момента, состоящий из ручки, муфты ограничения момента и вала; цифровой датчик положения выходного вала; блок коммутации; блок управления и цифровой канал информационного обмена с системой управления верхнего уровня, где выходной вал электродвигателя соединен с входом фрикционной электромагнитной муфты, выход которой через зубчатые колеса предварительного редуктора, солнечное колесо и сателлиты первой ступени двухступенчатого планетарного редуктора - планетарной передачи типа 3К, соединен с первым и вторым корончатыми колесами первой ступени двухступенчатого планетарного редуктора, причем первое корончатое колесо удерживается от вращения червяком из состава устройства ограничения крутящего момента, а второе корончатое колесо имеет соединение с солнечным колесом из состава второй ступени двухступенчатого планетарного редуктора - планетарной передачи, а солнечное колесо из состава второй ступени двухступенчатого планетарного редуктора через сателлиты соединено с неподвижным корончатым колесом второй ступени двухступенчатого планетарного редуктора и выходным валом, при этом выходной вал имеет жесткую механическую связь с валом цифрового датчика положения выходного вала; червяк в устройстве ограничения крутящего момента соединен с одной стороны через первую рейку и первое зубчатое колесо с первым силовым рычагом устройства ограничения крутящего момента, а с другой стороны - через вторую рейку и второе зубчатое колесо со вторым силовым рычагом устройства ограничения крутящего момента, где в свою очередь первый силовой рычаг устройства ограничения крутящего момента при достижении определенного угла поворота имеет возможность воздействовать своими гранями на тензометрический датчик устройства ограничения крутящего момента, а второй силовой рычаг устройства ограничения крутящего момента при достижении определенного угла поворота имеет возможность воздействовать своими гранями на тензометрический датчик устройства ограничения крутящего момента; ручка из состава ручного привода с муфтой ограничения момента соединена через муфту ограничения момента с валом ручного привода с муфтой ограничения момента, который в свою очередь имеет жесткую механическую связь с червяком из состава устройства ограничения крутящего момента; электрические входы-выходы электродвигателя и фрикционной электромагнитной муфты соединены с соответствующими выходами-входами блока коммутации, который в свою очередь имеет электрические связи с блоком управления и внешними источниками электрического тока; электрические входы-выходы тензометрического датчика из состава устройства ограничения крутящего момента и цифрового датчика положения выходного вала соединены с соответствующими выходами-входами блока управления; блок управления через цифровой канал информационного обмена с системой управления верхнего уровня связан с системой управления верхнего уровня, которая осуществляет дистанционное управление электроприводом однооборотным.
| ВЗРЫВОЗАЩИЩЕННЫЙ ЭЛЕКТРОМЕХАНИЗМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2002 |
|
RU2228478C9 |
| ПРИВОД ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ РЮД | 1996 |
|
RU2108513C1 |
| ПРЕРЫВИСТЫЙ ШЛИФОВАЛЬНЫЙ КРУГ | 1998 |
|
RU2153974C2 |
| US 5836567 A1, 17.11.1998 | |||
| DE 4239947 C1, 04.11.1993. | |||

