Предложение относится к области экспериментальной аэрогазодинамики и может быть использовано для определения газодинамических нагрузок на модели летательных аппаратов (ЛА) с работающими двигательными установками (ДУ) при моделировании и исследовании струйного взаимодействия в процессах разделения высотных ступеней ракет - носителей (РН), отделения космических аппаратов от разгонных блоков, их стыковки -расстыковки на орбите, посадки на поверхность планет с разреженной атмосферой и старта с них.
Известна газодинамическая барокамера (ГДБ), предназначенная для исследования газодинамического воздействия на ЛА струй ДУ, работающая в режиме наполнения и содержащая вакуумную камеру, системы вакуумирования, газообеспечения, управления и измерений, подключенное к системе измерений силоизмерительное устройство, корпус которого выполнен в виде соосных колец, соединенных симметрично размещенными вокруг их оси измерительными элементами, взаимодействующее с активной моделью, сопловой блок которой соединен с трубопроводом системы газообеспечения, пассивную модель, установленную с возможностью продольного перемещения на державке координатника, размещенного в рабочей зоне вакуумной камеры (см. патент РФ №2667687, 2017 г., МПК G01M 9/00).
Недостатком этого технического решения являются обусловленные его конструктивными особенностями ограниченные экспериментальные возможности. В частности, отсутствует возможность исследования газодинамического нагружения отделяемой (пассивной) модели.
Наиболее близким техническим решением, выбранным в качестве прототипа, является ГДБ, предназначенная для модельных исследований и определения газодинамического нагружения моделей летательных аппаратов, содержащая вакуумную камеру, системы вакуумирования, управления, измерений и газообеспечения с трубопроводом подачи газа, активную модель ЛА с сопловым блоком для имитации струй работающей ДУ и пассивную модель с подключенным к системе измерений силоизмерительным устройством, установленным на державке координатника, размещенного на площадке обслуживания в рабочей зоне вакуумной камеры (см. Бачин А.А., Мазин И.Н., Прочухаев М.В., Сажин Д.С., Храмов Н.Е. Газодинамическая барокамера У-22 ФГУП ЦНИИмаш. - Космонавтика и ракетостроение, 2015, вып. 4(83), с. 73-80). Испытания проводятся в режиме импульсной подачи рабочего газа в сопловой блок активной модели ЛА при заданных расстояниях между активной и пассивной моделями (ступенями РН) в условиях вакуума, с последующим квазистационарным падением давления в сопловом блоке ДУ и наполнением вакуумной камеры.
Недостатком этой ГДБ являются также обусловленные ее конструктивными особенностями ограниченные экспериментальные возможности. Так, отсутствует практическая возможность определения силового воздействия на пассивную модель (отделяемой ступени) струй ДУ активной модели (отделяющейся ступени) при исследовании задач «горячего» высотного разделения ступеней РН и близких расстояниях между ними. Это обусловлено особенностями установки испытываемых моделей. При вакуумировании имеют место деформации корпуса вакуумной камеры, которые приводят к изменению расстояния между активной моделью, закрепленной на трубопроводе, связанном с верхним днищем камеры, и пассивной моделью с силоизмерительным устройством, установленным на державке координатника, размещенного на площадке обслуживания, закрепленной в рабочей зоне вакуумной камеры. Кроме этого, при импульсной подаче газа в сопловой блок («ударном» запуске модельной ДУ) возникают механические колебания как трубопровода с сопловым блоком активной модели, так и державки координатника с силоизмерительным устройством и пассивной моделью.
Эти факторы при близких расстояниях между активной и пассивной моделями на начальных стадиях разделения ступеней ЛА могут приводить к большим ошибкам измерения газодинамических нагрузок и даже - к контакту и поломке моделей. Кроме того, могут иметь место дополнительные погрешности измерения из-за неоптимальной установки силоизмерительного устройства.
Задачами, на решение которых направлено предложенное техническое решение, являются повышение точности результатов испытаний и расширение экспериментальных возможностей ГДБ.
Технический результат, достигаемый данным предложением, заключается в снижении влияния деформаций и колебаний конструкции при вакуумировании и «ударном» запуске модельной ДУ, обеспечении возможности проведения испытаний при малых расстояниях между разделяющимися ступенями, а также в снижении влияния моментных нагрузок на результат измерения сил за счет оптимального размещения компактного силоизмерительного устройства
Этот результат достигается тем, что ГДБ, содержащая вакуумную камеру, системы вакуумирования, управления, измерений и газообеспечения с трубопроводом подачи газа, активную модель ЛА с сопловым блоком для имитации струй работающей ДУ отделяющейся ступени и пассивную модель отделяемой ступени с подключенным к системе измерений силоизмерительным устройством, установленным на державке координатника, размещенного на площадке обслуживания, закрепленной в рабочей зоне вакуумной камеры, снабжена установленной на площадке обслуживания жесткой рамой для вертикального крепления выполненного по форме кормовой части отделяющейся ступени соплового блока активной модели, соединение которого с трубопроводом подачи газа системы газообеспечения осуществлено посредством введенных коллектора и радиально симметрично расположенных армированных шлангов, а компактное силоизмерительное устройство размещено в передней части полости пассивной модели, выполненной в виде тонкостенной оболочки по форме отделяемой ступени с фермой и элементами межступенного отсека.
Как вариант технического решения, указанная ГДБ снабжена подключенным к системе измерений датчиком контроля касания активной и пассивной моделей, содержащим элемент фермы межступенного отсека со стороны активной модели, электроизолированный от остальных частей пассивной модели, взаимодействующий с активной моделью, выполненной из токопроводящего материала.
Кроме того, как вариант реализации ГДБ, его силоизмерительное устройство, выполненное из соосных колец, соединенных симметрично размещенными вокруг их оси измерительными элементами, сформировано в виде двух поясов упругих измерительных элементов, в первом из которых в плоскостях действия компонентов поперечной силы размещены два продольно ориентированных упругих параллелограмма с внутренними поперечными цилиндрическими подрезами на их продольных балках, соответственно связанных с кольцевыми основаниями этого пояса, и система четырех размещенных между боковыми гранями этих балок продольных упругих пластин типа «беличье колесо», соответственно соединенных вспомогательными кольцевыми основаниями между собой и с парами балок упругих параллелограммов, а во втором поясе - размещена кольцевая система шести параллелограммов с поперечными дугообразными упругими балками, выполненными с внутренними цилиндрическими подрезами по краям и посредством трех пар продольных жестких балок соответственно связанных с кольцевыми основаниям этого пояса, при этом тензопреобразователи, установленные на поверхностях упругих пластин «беличьего колеса», боковых гранях продольных балок параллелограммов и балок параллелограммов напротив поперечных подрезов, соответственно соединены в мостовые измерительные схемы для регистрации компонентов газодинамической силы и момента.
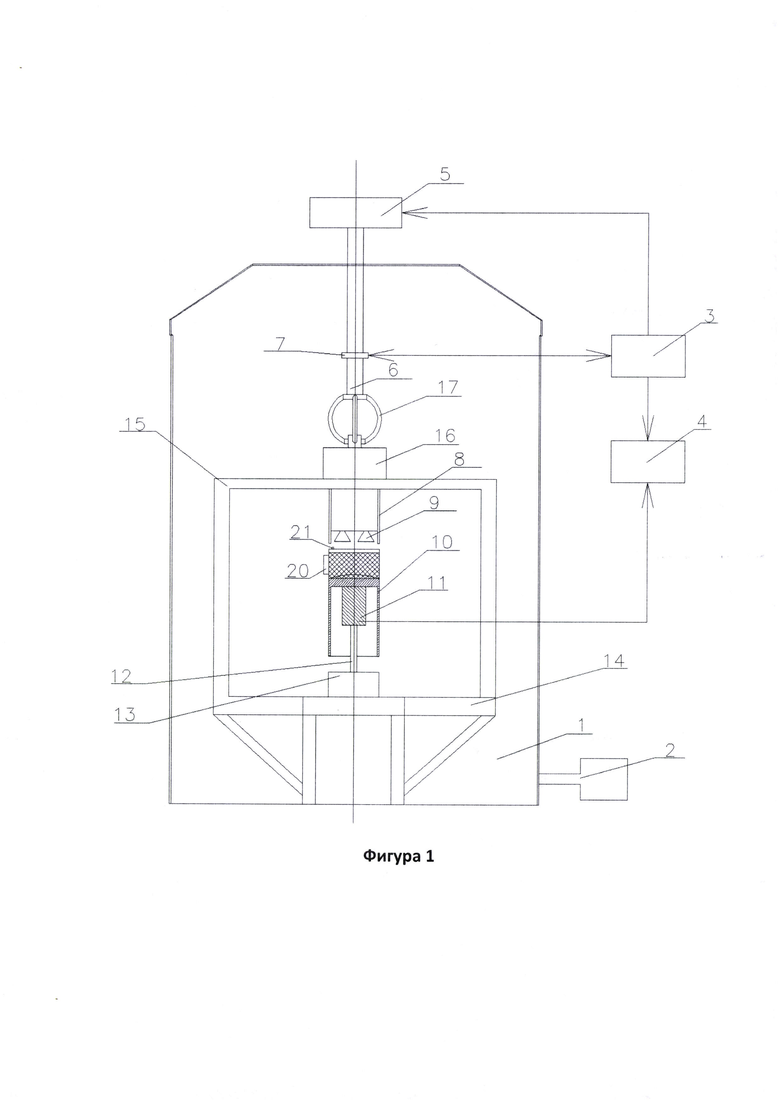
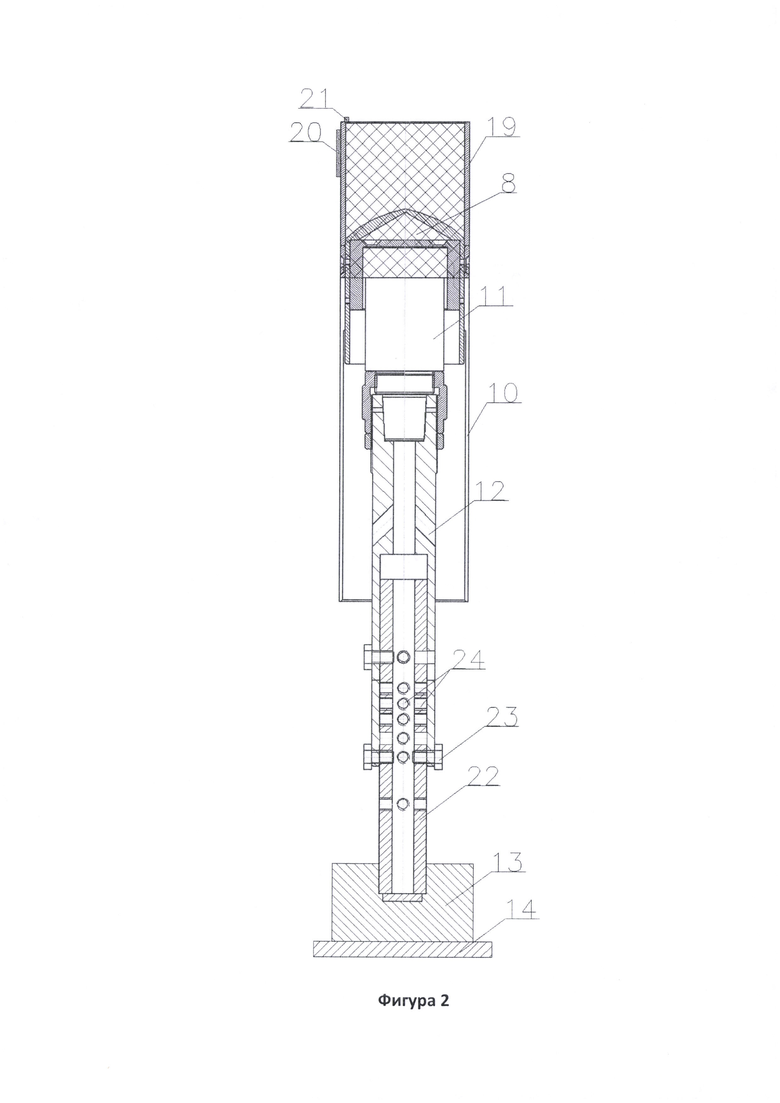
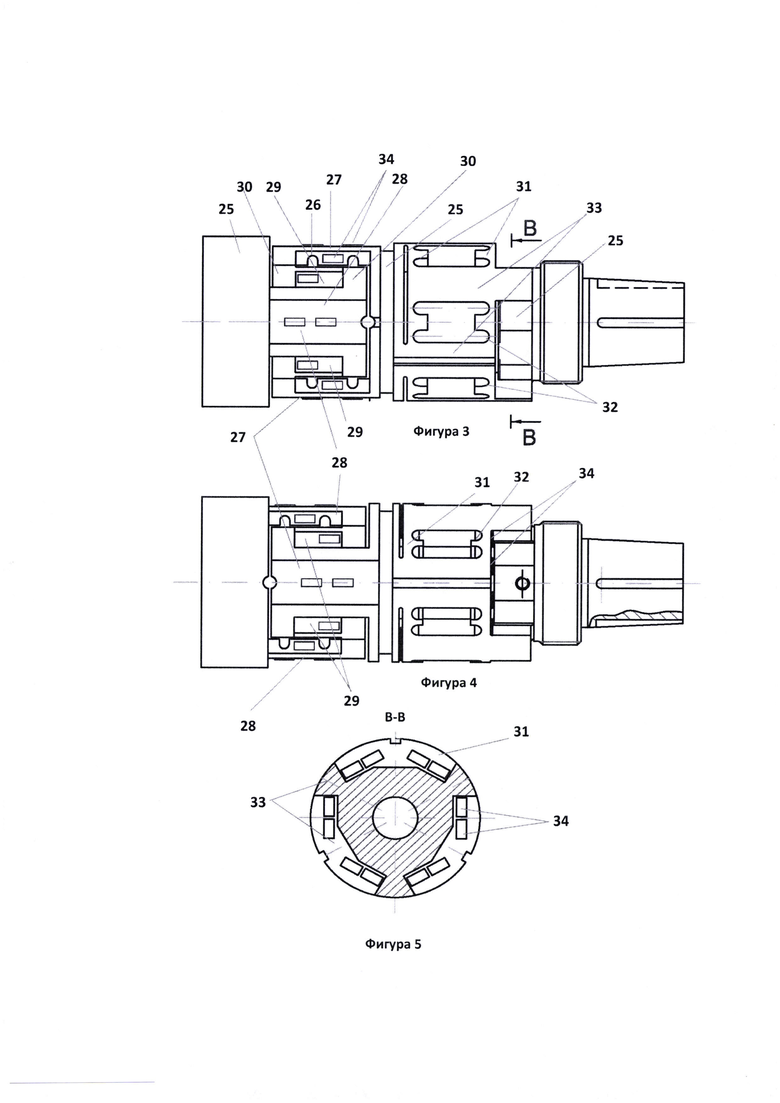
Существо предложения поясняется фигурами 1-5. На фигуре 1 показана конструктивная схема ГДБ, на фигуре 2 - конструктивная схема устройства пассивной модели и ее связей с ГДБ, на фигурах 3 - 5 - виды (сбоку, сверху и сечения В-В) динамометрического блока силоизмерительного устройства.
Газодинамическая барокамера (фигуры 1 и 2) содержит вакуумную камеру 1, систему вакуумирования 2, систему управления 3, систему измерений 4, систему газообеспечения 5 с трубопроводом 6 подачи газа и быстродействующим запорным устройством 7 (например, типа разрываемой диафрагмы), связанным с системой управления 3, активную модель 8 летательного аппарата с сопловым блоком 9 для имитации струй работающей ДУ и пассивную модель 10 с подключенным к системе измерений силоизмерительным устройством 11, установленным на державке 12 координатника 13, размещенного с возможностью регулировки начального положения на площадке обслуживания 14 в рабочей зоне вакуумной камеры. На этой же площадке установлены жесткая рама 15 для вертикального крепления соплового блока 9 активной модели 8, который посредством коллектора 16 и радиально симметрично вертикальной оси расположенных армированных шлангов 17 соединен с трубопроводом 6 подачи газа системы газообеспечения 5. Кормовая часть активной модели 8 выполнена по форме кормовой части отделяющейся (активной) ступени. Компактное силоизмерительное устройство 11 размещено в полости носовой части 18 пассивной модели 10, выполненной в виде тонкостенной оболочки по форме отделяемой ступени с фермой 19 и элементами 20 межступенного отсека.
В варианте исполнения ГДБ снабжена подключенным к системе измерений 4 датчиком контроля касания активной 8 и пассивной 10 моделей, который выполнен в виде элемента 21 фермы со стороны активной модели 8, электроизолированного от остальных частей пассивной модели 10, взаимодействующего с активной моделью 8, выполненной из токопроводящего материала.
Державка 12 снабжена устройством продольного перемещения (фигура 2), содержащим взаимодействующую с ней по ходовой посадке трубу 22, которая крепится к координатнику 13. Фиксация продольного положения державки 12, связанной с силоизмерительным устройством 11 и пассивной моделью 10, осуществлено с помощью болтов 23 и радиальных отверстий 24, выполненных соответственно в стенках труб 12 и 22.
Силоизмерительное устройство 11 (фигуры 3-5) выполнено в виде 3-х соосных кольцевых оснований 25, соединенных двумя поясами упругих измерительных элементов, в первом из которых в плоскостях действия компонентов поперечной силы размещены два продольно ориентированных упругих параллелограмма с поперечными цилиндрическими подрезами 26 на парах их продольных балок 27 и 28, соответственно связанных с кольцевыми основаниям этого пояса, и система четырех крестообразно размещенных между боковыми гранями балок 27 и 28 продольных упругих пластин 29, соответственно соединенных промежуточными кольцевыми основаниями 30 между собой и с указанными парами балок упругих параллелограммов, а во втором поясе - размещена кольцевая система шести параллелограммов с поперечными дугообразными упругими балками 31, выполненными с внутренними цилиндрическими подрезами 32 по краям и посредством трех пар продольных жестких балок 33 соответственно связанных с кольцевыми основаниям 25 этого пояса, при этом тензопреобразователи 34, установленные на поверхностях упругих пластин 29, боковых гранях продольных балок 27 и 28 параллелограммов и напротив подрезов 26 и 32 упругих балок, соответственно соединены в мостовые измерительные схемы для регистрации компонентов газодинамической силы и момента.
ГДБ функционирует следующим образом. С помощью координатника 13 (см. фигуры 1 и 2) и устройства продольного перемещения (позиции 12 и 22-24) устанавливают начальное положение пассивной модели 10 относительно активной модели 8 летательного аппарата. В случае необходимости начальное положение корректируют соответствующим смещением координатника относительно площадки обслуживания. После проверки готовности всех систем камеру 1 вакуумируют с использованием системы 2 до давления, заданного программой испытаний. В системе газообеспечения 5 с помощью системы 3 управления создают требуемое по программе испытаний давление рабочего газа. После этого с системы управления 3 подают запускающий сигнал в систему измерений 4 и на быстродействующее запорное устройство 7. Система измерений 4 включается на режим регистрации измеряемых параметров. После срабатывания быстродействующего запорного устройства рабочий газ по трубопроводу 6 через коллектор 16 и шланги 17 поступает в сопловой блок 9 активной модели. Истекающие в межступенное пространство из соплового блока 8 струи взаимодействуют с пассивной моделью 10, создавая газодинамическое нагружение элементов активной и пассивной моделей. Нагружение последней вызывает деформации упругих элементов динамометрического блока силоизмерительного устройства 11 и соответствующих тензопреобразователей 34. В измерительных схемах появляются электрические сигналы, пропорциональные величинам соответствующих компонентов газодинамической нагрузки (продольной и поперечных сил, изгибающих и крутящего моментов) в заданной системе координат. Возможность контакта (особенно при задаваемых малых расстояниях между активной и пассивной моделями) контролируют с помощью датчика касания (позиции 20 и 21).
Аналогичную последовательность действий используют для других положений пассивной модели относительно активной, задаваемых с помощью устройства продольного перемещения (позиции 12, 22-24), а также для других условий испытаний: начального разрежения в вакуумной камере, давления в трубопроводе 6 системы газообеспечения и т.п.
Отличительные особенности предложенного технического решения в части силовой схемы испытаний, в которую введена жесткая силовая рама, соединяющая активную и пассивную модели, силоизмерительное устройство и гибкие шланги для связи соплового блока 9 с системой газообепечения, обеспечивают устранение влияния механических деформаций корпуса при вакуумировании и снижение уровня колебаний конструкции при «ударном» запуске модельной ДУ. При этом симметричность элементов коллектора 16 и расположения шлангов 17 способствует выравниванию возмущений давления при запуске ДУ.
Размещение силоизмерительного устройства в передней части полости тонкостенной оболочки пассивной (отделяемой) модели и предложенный компактный вариант его исполнения (длина динамометрической части составляет немного более одного калибра) способствуют повышению жесткости силоизмерительной системы, уменьшению плеч действия измеряемых силовых нагрузок, величин моментов сил и деформаций от них. При этом обеспечиваются повышение точности измерений и возможность проведения испытаний при малых величинах расстояния между разделяющимися ступенями ЛА. Повышению надежности результатов испытаний способствует контроль контакта разделяющихся ступеней. Предложенный вариант выполнения механизма задания продольного положения державки силоизмерительного устройства обеспечивает его удобное и простое применение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Газодинамическая барокамера | 2017 |
|
RU2667687C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 2013 |
|
RU2539763C1 |
| Устройство для испытаний моделей летательных аппаратов в аэродинамических трубах | 2017 |
|
RU2685576C2 |
| ГАЗОДИНАМИЧЕСКИЙ ТРАКТ НЕПРЕРЫВНОГО ХИМИЧЕСКОГО ЛАЗЕРА С АКТИВНЫМ ДИФФУЗОРОМ В СИСТЕМЕ ВОССТАНОВЛЕНИЯ ДАВЛЕНИЯ | 2009 |
|
RU2408960C1 |
| ГАЗОДИНАМИЧЕСКИЙ ТРАКТ СВЕРХЗВУКОВОГО ХИМИЧЕСКОГО ЛАЗЕРА С АКТИВНЫМ ДИФФУЗОРОМ | 2015 |
|
RU2609186C2 |
| Приспособление для перемещения измерительного зонда в потоке | 1978 |
|
SU699378A2 |
| УСТРОЙСТВО ИМПУЛЬСНОГО НАГРЕВА ВОЗДУХА | 2010 |
|
RU2426085C1 |
| Пороховой аккумулятор давления для минометной схемы разделения ступеней ракеты в полете | 2018 |
|
RU2678726C1 |
| Однокомпонентные аэродинамические весы | 1961 |
|
SU147823A1 |
| СПОСОБ ВЫСОТНЫХ ИСПЫТАНИЙ КРУПНОГАБАРИТНОГО РДТТ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492341C1 |
Изобретение относится к экспериментальной аэрогазодинамике и касается определения газодинамических нагрузок на модели летательных аппаратов (ЛА) с работающими двигательными установками (ДУ) при разделения высотных ступеней. Газодинамическая барокамера (ГДБ) содержит вакуумную камеру, системы вакуумирования, управления, измерений и газообеспечения с трубопроводом подачи газа, активную модель ЛА с сопловым блоком для имитации струй работающей ДУ и пассивную модель с подключенным к системе измерений силоизмерительным устройством, установленным на державке координатника. Координатник размещен на площадке обслуживания, закрепленной в рабочей зоне вакуумной камеры. ГДБ снабжена жесткой рамой для вертикального крепления, выполненного по форме кормовой части отделяющейся ступени активной модели. Компактное силоизмерительное устройство размещено в полости передней части пассивной модели, выполненной в виде тонкостенной оболочки по форме отделяемой ступени с фермой и элементами межступенного отсека. Достигается снижение влияния деформаций и колебаний конструкции при вакуумировании и «ударном» запуске модельной ДУ, обеспечение возможности проведения испытаний при малых расстояниях между разделяющимися ступенями, снижение влияния моментных нагрузок на результат измерения сил. 2 з.п. ф-лы, 5 ил.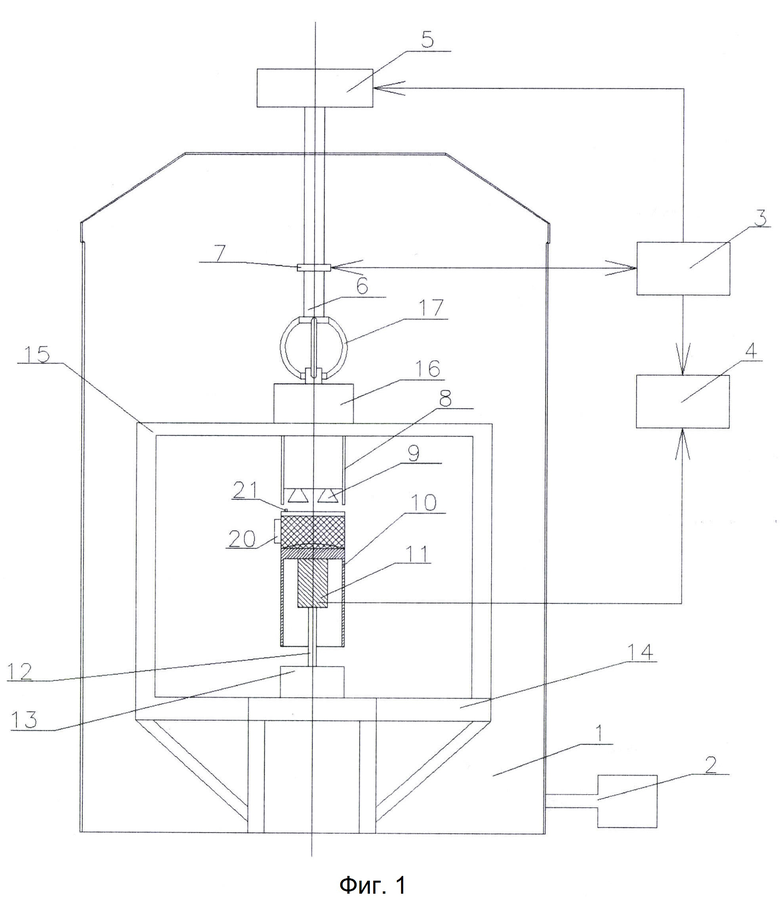
1. Газодинамическая барокамера, содержащая вакуумную камеру, системы вакуумирования, управления, измерений и газообеспечения с трубопроводом подачи газа, активную модель летательного аппарата с сопловым блоком для имитации струй работающей двигательной установки и пассивную модель с подключенным к системе измерений силоизмерительным устройством, установленным на державке координатника, размещенного на площадке обслуживания, закрепленной в рабочей зоне вакуумной камеры, отличающаяся тем, что она снабжена установленной на площадке обслуживания жесткой рамой для вертикального крепления выполненного по форме кормовой части отделяющейся ступени соплового блока активной модели, посредством введенных коллектора и радиально симметрично расположенных армированных шлангов соединенного с трубопроводом подачи газа системы газообеспечения, а компактное силоизмерительное устройство размещено в полости передней части пассивной модели, выполненной в виде тонкостенной оболочки по форме отделяемой ступени с фермой и элементами межступенного отсека.
2. Газодинамическая барокамера по п.1, отличающаяся тем, что она снабжена подключенным к системе измерений датчиком контроля касания активной и пассивной моделей, содержащим элемент фермы межступенного отсека со стороны активной модели, электроизолированный от остальных частей пассивной модели, взаимодействующий с активной моделью, выполненной из токопроводящего материала.
3. Газодинамическая барокамера по п.1, отличающаяся тем, что в ней силоизмерительное устройство, выполненное из соосных колец, соединенных симметрично размещенными вокруг их оси измерительными элементами, сформировано в виде двух поясов упругих элементов, в первом из которых в плоскостях действия компонентов поперечной силы размещены два продольно ориентированных упругих параллелограмма с поперечными подрезами на их продольных балках, соответственно связанных с кольцевыми основаниям этого пояса, и система четырех размещенных между боковыми гранями этих балок продольных упругих пластин типа «беличье колесо», соответственно соединенных вспомогательными кольцевыми основаниями между собой и парами балок упругих параллелограммов, а во втором поясе размещена кольцевая система шести параллелограммов с поперечными дугообразными упругими балками, выполненными с внутренними цилиндрическими подрезами по краям и посредством трех пар продольных жестких балок соответственно связанными с кольцевыми основаниями этого пояса, при этом тензопреобразователи, установленные на поверхностях упругих пластин «беличьего колеса», боковых гранях продольных балок параллелограммов и балок параллелограммов напротив поперечных подрезов, соответственно соединены в мостовые измерительные схемы для регистрации компонентов газодинамической силы и момента.
| Газодинамическая барокамера | 2017 |
|
RU2667687C1 |
| Импульсная аэродинамическая труба с криогенной откачкой рабочего газа и способ испытаний в ней | 1988 |
|
SU1577487A1 |
| CN 0203688195 U, 02.07.2014 | |||
| CN 104458189 В, 17.05.2017. | |||

