Предлагаемое техническое решение относится к экспериментальной аэродинамике, в частности к устройствам для испытания моделей летательных аппаратов в аэродинамических трубах, и может быть использовано для определения комплекса стационарных и нестационарных аэродинамических характеристик летательных аппаратов (ЛА).
Известно устройство для испытаний моделей ЛА в аэродинамических трубах (см. N.V. Golubin, V.V. Kislykh, et al. Methods and Means of Studying Dynamic Stability Characteristics of Hypersonic Flying Vehicles Used in Piston Gasdynamic Facilities, Proceedings of the 7-th International Conference on Methods of Aerophysical Research, Novosibirsk, Russia, 1994, part 1, pp. 98-103), содержащее адаптер для установки испытываемой модели, соединенный с размещаемой в рабочей части аэродинамической трубы донной державкой посредством шарнира с возможностью свободного поворота относительно державки, датчик углового положения адаптера, силоизмерительный элемент в виде выполненной на передней части державки позади шарнира упругой продольной балки с размещенными на ее гранях тензопреобразователями, механизм установки и пуска адаптера с заданного начального угла относительно державки в виде размещенного по оси в теле державки пневмоцилиндра, шток которого связан с фиксатором и ловителем, выполненным в виде обращенного к адаптеру раструба с наклонными и продольными относительно продольной оси державки контактными поверхностями, перпендикулярными к плоскости поворота адаптера и взаимодействующими при движении штока с кулачком, закрепляемым на адаптере под заданным начальным углом.
Это устройство обеспечивает возможность многократной установки и пуска адаптера (модели) с заданного начального угла и определение комплекса аэродинамических характеристик ЛА в плоскости угла атаки α (коэффициентов подъемной силы cy производных момента тангажа по углу атаки  и угловой скорости
и угловой скорости  ) при динамическом изменении угла атаки вокруг балансировочного αбал. Его недостатком является ограниченность функциональных возможностей (отсутствие возможности измерения продольной и боковой компонент аэродинамической силы и момента крена) и ненадежность работы фиксирующего и пускового механизма.
) при динамическом изменении угла атаки вокруг балансировочного αбал. Его недостатком является ограниченность функциональных возможностей (отсутствие возможности измерения продольной и боковой компонент аэродинамической силы и момента крена) и ненадежность работы фиксирующего и пускового механизма.
Известно устройство для испытаний моделей ЛА в аэродинамических трубах (патент РФ №2539763 от 24.07.2013 г. МПК G01M 9/00), выбранное в качестве прототипа и содержащее адаптер с узлом установки испытываемой модели, соединенный с размещаемой в рабочей части аэродинамической трубы донной державкой посредством шарнира с возможностью свободного поворота в заданных пределах в продольной плоскости относительно державки, датчик углового положения адаптера с чувствительным элементом и якорем, силоизмерительный элемент, расположенный на передней части державки позади шарнира, и механизм установки и пуска модели с заданного начального угла в виде размещенного в теле державки пневмоцилиндра, шток которого взаимодействует с фиксатором и соединен с ловителем в виде обращенного к адаптеру раструба с наклонными и продольными относительно оси державки контактными поверхностями, взаимодействующими с центральной частью кулачка, закрепляемого на адаптере, а фиксатор выполнен в виде перемещаемой вдоль державки втулки, взаимодействующей с периферийными частями кулачка.
Устройство обеспечивает определение комплекса аэродинамических характеристик: коэффициентов лобового сопротивления cx, подъемной cy и боковой cz сил, моментов крена mx и рыскания my при плоских свободных угловых колебаниях испытываемой модели, определение коэффициентов статической и динамической производных момента тангажа  и
и  .
.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение потребительских качеств устройства за счет обеспечения пространственных угловых колебаний испытываемой модели, регистрации ее мгновенных угловых положений и соответствующих компонент аэродинамической нагрузки.
Технический результат, который обеспечивается данным предложением, заключается в расширении номенклатуры определяемых аэродинамических характеристик ЛА и приближении условий испытаний к условиям их натурного полета, в котором угловые колебания ЛА, носят пространственный характер.
Это достигается тем, что в устройство для испытаний моделей летательных аппаратов в аэродинамических трубах, содержащее адаптер с узлом крепления испытываемой модели, установленный посредством шарнира на размещаемой в рабочей части аэродинамической трубы донной державке с возможностью свободного поворота в заданных пределах вокруг оси, перпендикулярной оси державки, датчик углового положения адаптера с чувствительным элементом и якорем, силоизмерительный элемент, расположенный на передней части державки позади шарнира, и механизм установки и пуска модели с заданного начального угла относительно державки в виде размещенного в теле державки пневмоцилиндра, шток которого взаимодействует с фиксатором и соединен с ловителем в виде обращенного к адаптеру раструба с наклонными и продольными относительно оси державки контактными поверхностями, взаимодействующими с центральной частью кулачка, закрепляемого на адаптере, а фиксатор выполнен в виде перемещаемой вдоль державки втулки, взаимодействующей с периферийными частями кулачка, введены дополнительный шарнир, обеспечивающий свободный поворот адаптера в заданных пределах вокруг поперечной оси, перпендикулярной оси основного шарнира, датчик углового положения адаптера в плоскости поворота дополнительного шарнира с якорем и чувствительным элементом, в котором чувствительный элемент установлен на державке по оси основного шарнира, а поверхность закрепленного на адаптере якоря, обращенная к чувствительному элементу, выполнена в виде цилиндра, ось которого параллельна оси дополнительного шарнира и смещена относительно оси основного, и сменные клиновые проставки между узлом крепления испытываемой модели и корпусом адаптера, обеспечивающие пересечение продольной оси узла крепления модели и точки пересечения осей указанных шарниров, при этом раструб ловителя механизма установки и пуска модели выполнен в виде воронки с конической и цилиндрической поверхностями, соосными со штоком пневмоцилиндра указанного механизма, а центральная часть кулачка выполнена в виде соответствующего цилиндрической поверхности ловителя цилиндрического пальца со сферической законцовкой.
Дополнительно функциональные возможности устройства могут быть расширены введением второго дополнительного шарнира, обеспечивающего свободный поворот узла крепления испытываемой модели вокруг продольной оси с выполненным на ней фланцем, соединяемым посредством указанной клиновой проставки с адаптером, и дополнительный датчик угла поворота модели вокруг продольной оси с установленным на указанном фланце чувствительным элементом, взаимодействующим с размещенным на торцовой поверхности узле крепления испытываемой модели якорем, выполненным в виде радиально ориентированных остроконечных зубцов заданного шага, один из которых притуплен.
Сущность предложения заключается в обеспечении возможности многократного пуска модели с заданного начального пространственного угла и ее свободного пространственного углового движения в заданных пределах относительно двух или трех ортогональных осей при регистрации изменения во времени мгновенных значений угловых положений и соответствующих величин компонент аэродинамической силы, позволяющих определить дополнительный (по сравнению с прототипом) комплекс аэродинамических характеристик модели в условиях, приближенных к условиям натурного полета испытываемых ЛА.
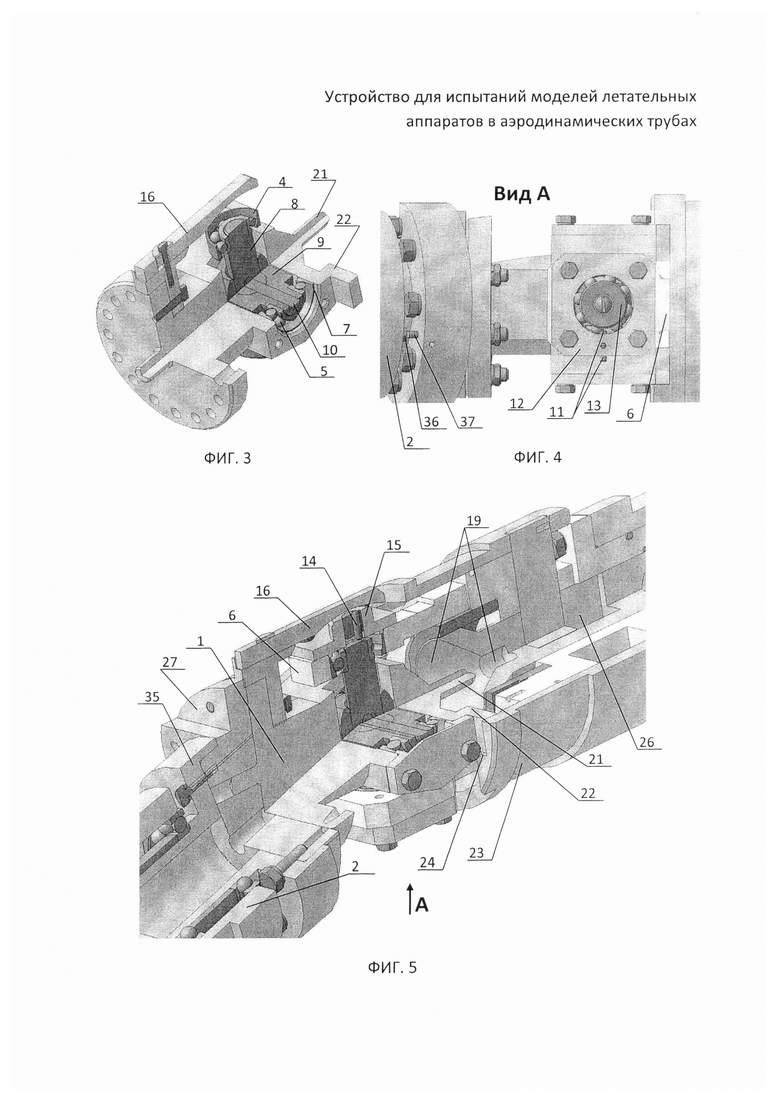
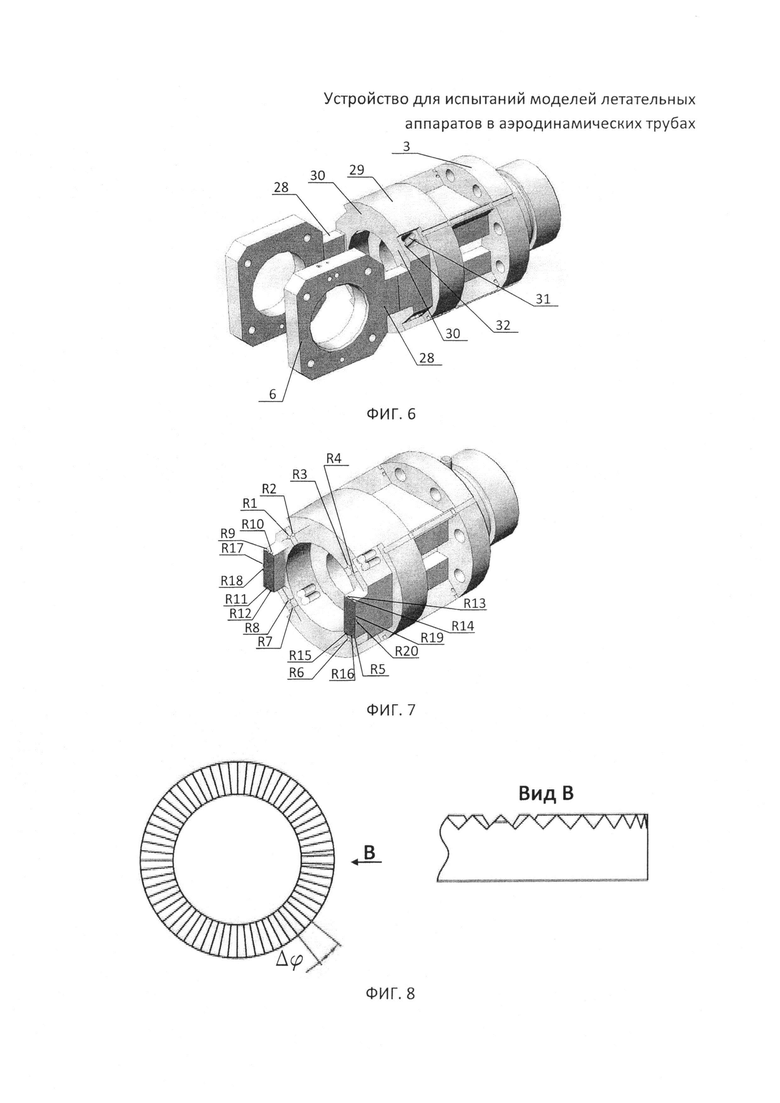
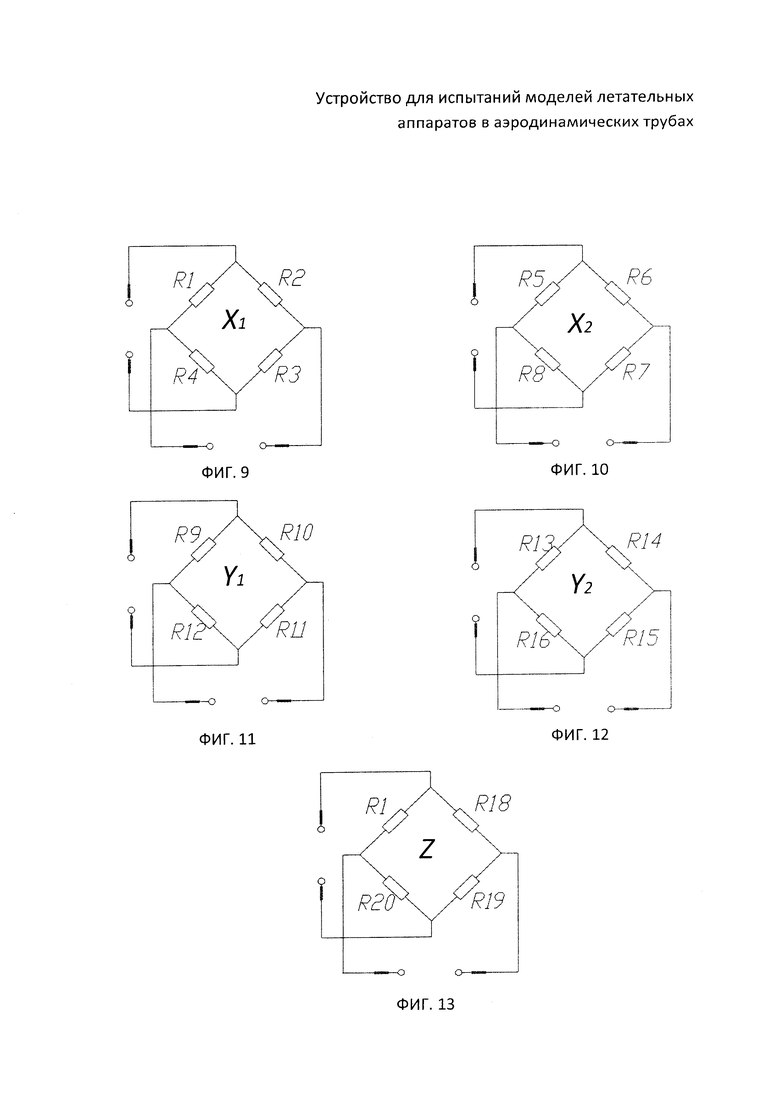
Предлагаемое техническое решение поясняют фиг. 1-12. На фиг. 1 показан общий вид устройства; на фиг. 2 - вид этого устройства с продольным вырезом; на фиг. 3 - вид адаптера устройства; на фиг. 4 - вид А на фиг. 1 и 2; на фиг. 5 - вид элементов механизма установки и пуска модели; на фиг. 6, 7 вид силоизмерительного элемента и его сечения с тензопреобразователями; на фиг. 8 - вариант якоря (вид сверху и сбоку) второго дополнительного датчика углового положения модели; на фиг. 9-13 - схемы соединения тензопреобразователей.
Представленное устройство для испытаний моделей летательных аппаратов в аэродинамических трубах включает адаптер 1 с узлом крепления 2 исследуемой модели летательного аппарата (на чертеже не показана), соединенный с державкой 3 с помощью шарнирного узла, содержащего две пары шарикоподшипников 4 и 5 одна из которых установлена в кольцевых корпусах 6, выполненных На консольной части державки 3 и обеспечивает угловые перемещения адаптера в заданных пределах в вертикальной плоскости (плоскости углов атаки α), а другая пара - в гнездах 7 адаптера и обеспечивает угловые перемещения адаптера в заданных пределах в горизонтальной плоскости (плоскости углов скольжения β). Шарнирный узел включает также взаимно Перпендикулярные оси 8 и 9 (пересекающиеся в одной точке на продольной оси державки), соединенные с соответствующими парами шарикоподшипников. Фиксация указанных осей обеспечивается замковым штырем 10.
Для регистрации указанных угловых движений адаптера используются бесконтактные индуктивные датчика. Датчик углового перемещения по углу α включает чувствительный элемент 11 (катушка индуктивности, размещенная в соответствующем магнитопроводе, изготовленном из электротехнической стали), установленный в одной из крышек 12 кольцевого корпуса подшипников 6, и взаимодействующий с ним якорь 13 (в виде цилиндра, изготовленного из электротехнической стали и установленного с эксцентриситетом относительно оси 8). Датчик углового перемещения по углу β включает чувствительный элемент 14 (катушка индуктивности, размещенная в соответствующем магнитопроводе, изготовленном из электротехнической стали), который установлен на другой крышке 15 кольцевого корпуса подшипников 6 и ориентирован по оси поворота по углу атаки α шарнирного узла, и взаимодействующий с ним закрепленный на адаптере 1, изготовленный из электротехнической стали якорь 16, поверхность которого, обращенная к чувствительному элементу, выполнена в виде цилиндра, ось которого параллельна оси поворота адаптера по углу скольжения β и смещена относительно оси поворота по углу атаки α.
Устройство оснащено механизмом установки и пуска модели с заданного угла атаки, выполненным в виде размещенного по оси в теле державки 3 пневмоцилиндра 17 с поршнем и односторонним штоком 18, на передней, торцовой части которого размещен ловитель 19, выполненный в виде обращенной к адаптеру воронки с конической и цилиндрической поверхностями, взаимодействующий с закрепленным на адаптере 1 кулачком, центральная часть которого выполнена в виде соответствующего цилиндрической поверхности ловителя цилиндрического пальца со сферической законцовкой 21, а периферийная - в виде поперечной планки с прямоугольными законцовками 22. В составе механизма имеется также фиксатор 23, выполненный в виде установленной на поверхности державки с возможностью продольного перемещения втулки с вырезами 24 прямоугольной формы для взаимодействия с периферийными поверхностями кулачка 22, а взаимодействие фиксатора со штоком пневмоцилиндра осуществлено посредством водила 25, поперечно закрепленного в стенках втулки и размещенного в продольной прорези 26 штока 18. Отметим, что длина прорези 26 обеспечивает заданную величину свободного хода штока 18.
Для обеспечения пуска испытываемой модели с заданного начального угла в составе механизма предусмотрены сменные клиновые (с углом клина, равным требуемой величине начального угла модели) проставки 27, устанавливаемые между узлом крепления испытываемой модели 2 и корпусом адаптера 1, при этом конфигурация проставки 27 обеспечивает пересечение осей основного и дополнительного шарниров и продольной оси узла крепления модели в одной точке.
Устройство также оснащено многокомпонентным силоизмерительным элементом (фиг. 6, 7) в виде продольных упругих балок прямоугольного сечения 28 с размещенными на их гранях тензопреобразователями R9-R18, соответственно включенными в мостовые измерительные схемы (фиг. 11-13). Указанные балки соединяют кольцевые корпуса 6 шарикоподшипников шарнира поворота адаптера по углу атаки α с телом державки 3 посредством двух консольных жестких продольных балок 29, выполненных на теле державки и четырех поперечно расположенных дугообразных перемычек 30, концы которых соединены с боковыми гранями продольных упругих и консольных жестких балок 28 и 29. Указанные дугообразные перемычки выполнены с прорезями 31 посередине, образующими параллелограммы с поперечными упругими дугообразными балками, на поверхности которых размещены тензопреобразователи R1-R8, соответственно включенные в мостовые измерительные схемы (фиг. 9, 10). На внутренней стороне этих дугообразных балок около мест их соединения с продольными упругими и жесткими консольными балками выполнены цилиндрические подрезы 32, а тензопреобразователи R1-R8 размещены на поверхности дугообразных балок напротив подрезов.
В варианте устройства с расширенным диапазоном функциональных возможностей на фланце адаптера 1 посредством сменных клиновых проставок 27 устанавливают дополнительный механизм осевого вращения модели с дополнительным шарниром осевого вращения, включающим цилиндрический узел крепления 2 испытываемой модели, радиальные 33 и упорные 34 шарикоподшипники и ось шарнира 35 с соответствующим фланцем для соединения указанного механизма через проставку 27 с адаптером. Для регистрации углового положения (угла крена ϕ) узла крепления 2 испытываемой модели вокруг продольной оси использован дополнительный бесконтактный индуктивный датчик, включающий установленный на заднем торце цилиндрического поршня 2 якорь 36 (который может быть выполнен либо в виде винта с цилиндрической головкой, изготовленного из электротехнической стали - как это показано на фиг. 4, либо в виде радиально ориентированных остроконечных зубцов заданного шага, один из которых притуплен - как это показано на фиг. 8, либо - в виде винтовой поверхности, обеспечивающей линейное изменение величины воздушного зазора в зависимости от угла поворота) и установленный на фланце оси дополнительного шарнира 35 чувствительный элемент (катушка индуктивности) 37.
Работа устройства осуществляется следующим образом.
Устройство с помощью державки 3 закрепляют в рабочей части аэродинамической трубы, на узел крепления 2 модели адаптера 1 устанавливают модель испытываемого ЛА, при этом центр масс модели (совпадающий с положением центра масс исследуемого ЛА) совмещают с точкой пересечения осей всех шарниров устройства. Монтируют трубки подвода пневмопитания и электрические цепи регистрации измеряемых параметров.
При подаче сжатого воздуха в заднюю полость пневмоцилиндра поршень и шток 18 перемещаются вперед и коническая поверхность 19 ловителя вступает в контакт со сферической поверхностью цилиндрического пальца кулачка 21, вызывая соответствующий поворот адаптера 1, продолжающийся пока в контакт не вступят цилиндрические поверхности кулачка и ловителя. В этот момент продольная ось кулачка совпадает с продольной осью штока 18 и державки 2, а адаптер 1 (и испытываемая модель) находятся под требуемым начальным углом атаки, под которым узел крепления 2 зафиксирован (с помощью соответствующей клиновой проставки 32) относительно оси адаптера. До этого момента втулка фиксатора 23 находилась в крайнем заднем положении и шток свободно (в пределах заданной величины его свободного хода) перемещался относительно водила 25 фиксатора. При дальнейшем движении штока водило 25 вступает в контакт со штоком 18 и начинает перемещаться вместе с втулкой фиксатора 23 в крайнее переднее положение, вступая во взаимодействие с наружными периферийными поверхностями кулачка 22, фиксируя его и адаптер 1 (а также испытываемую модель летательного аппарата) в заданном начальном угловом положении. Далее поршень 21 доходит до упора и движение останавливается.
Раскручивают модель, например, воздействуя на нее тангенциально ориентированной к поверхности модели струей сжатого воздуха от внешнего источника, расположенного вне границ потока аэродинамической трубы, достигая требуемой частоты вращения модели, которую контролируют с помощью датчика угла ср, установленного на фланце 35 дополнительного шарнира, после чего отключают внешний источник.
При этом в случае применения якоря, показанного на фиг. 4, датчик выдает один импульс на каждый оборот модели; в случае применения якоря, показанного на фиг. 8, датчик выдает серии импульсов на каждый оборот модели, из которых один, отличный от других, отделяет каждый оборот. При применении якоря виде винтовой поверхности датчик также выдает один характерный импульс на каждый оборот модели
Производят запуск аэродинамической трубы, при этом на модель воздействует поток воздуха с требуемыми параметрами по давлению, температуре, скорости. Пуск модели осуществляют при стравливании сжатого воздуха из задней полости пневмоцилиндра 17 и подаче - в переднюю. При этом шток 18 движется назад (цилиндрическая поверхность раструба ловителя выходит из зацепления с пальцем кулачка 21) вначале свободно - в пределах прорези, затем вступает в контакт с водилом 25, посредством которого выводит фиксатор 23 из зацепления с наружными боковыми поверхностями кулачка 22 обеспечивая необходимое пространство для угловых колебаний кулачка, адаптера и модели. Следует отметить, что разрыв контакта кулачка и фиксатора (и пуск модели) происходит практически мгновенно из-за прямоугольной формы контактирующих поверхностей и большой скорости фиксатора в конце его хода.
При освобождении кулачка и адаптера под действием аэродинамических сил модель и адаптер осуществляют свободные угловые перемещения относительно осей шарниров державки, при этом соответственно изменяются зазоры между якорями и чувствительными элементами датчиков углов α и β, которые выдают сигналы, величины которых пропорциональны мгновенным угловым положениям модели. Отметим, что в силу своих конструктивных особенностей, датчик углового перемещения по углу β не реагирует на поворот своего якоря по углу α.
В зависимости от исполнения якоря 36 датчика ϕ датчик может фиксировать величину частоты вращения модели или изменение по времени угла крена модели (датчик дискретных угловых отметок позволяет построить траекторию от «нулевой» отметки через каждые Δϕ (на практике величина Δϕ может составлять 1-2°), аналоговый датчик, обеспечивающей линейное изменение величины воздушного зазора в зависимости от угла поворота, также позволяет определить мгновенное угловое положение модели по углу ϕ. Заметим, что датчик дискретных угловых отметок обладает большей помехоустойчивостью.
При свободных угловых движениях модели действующая на нее аэродинамическая нагрузка через шарикоподшипники и оси шарниров, адаптер и кольцевые корпуса передается на продольные упругие балки 28 и дугообразные перемычки 30, вызывая их соответствующие деформации и деформации размещенных на них тензопреобразователей R1-R20. При этом в соответствующих измерительных схемах появляются электрические сигналы, пропорциональные величинам действующих компонент нагрузки.
Ортогональная система координат Oxyz, в соответствии с которой осуществляется измерение компонентов аэродинамической нагрузки данным устройством, образована следующим образом: начало системы координат находится на пересечении продольной оси державки 3 устройства и осей шарнирного узла, продольная ось Ох совпадает с продольной осью державки, ось Oz совпадает с осью основного шарнира, а ось Оу - перпендикулярна плоскости xOz.
Измерительные элементы, образованные из тензопреобразователей R1-R8, предназначены для измерения продольной силы X, причем размещение тензопреобразователей R1-R8 на дугообразных балках напротив подрезов (в местах концентрации механических напряжений) способствует повышенной точности измерения компонентов продольной силы. Эти элементы разделены на две группы, каждая из которых примыкает к одной из продольных упругих балок 28 и предназначена для измерения продольных сил X1 (фиг. 9) и Х2 (фиг. 10), действующих вдоль этих балок; сумма этих сил составляет продольную силу X, действующую на испытываемую модель X=X1+Х2. Разность этих сил позволяет определить момент рыскания Му, действующий вокруг оси Оу на испытываемую модель. При этом Му=a(X1-Х2), где а - расстояние между серединами (нейтральными плоскостями) продольных балок 28.
Измерительные элементы, образованные на основе тензопреобразователей R9-R16, размещенных на узких горизонтальных гранях упругих продольных балок 28, предназначены для измерения нормальной (подъемной) силы Y, действующей в плоскости колебаний модели по углу атаки α, причем эти элементы выполнены для каждой из продольных упругих балок и предназначены для измерения сил Y1 (фиг. 11) и Y2 (фиг. 12), действующих на каждую из этих балок; сумма этих сил является нормальной (подъемной) силой Y, действующей на испытываемую модель Y=Y1+Y2. Разность этих сил позволяет определить момент крена Мх, действующий вокруг оси Ох на испытываемую модель. При этом Мх=a(Y1-Y2).
Измерительные элементы, образованные из тензопреобразователей R17-R20 (фиг. 13), размещенных на широких вертикальных гранях обеих продольных упругих балок, предназначены для измерения боковой силы Z, действующей на модель вдоль оси Oz шарнира в плоскости углов скольжения β.
При повторении цикла обеспечивается повторная установка модели под заданным начальным углом и пуск модели с этого угла
Таким образом, при реализации разработанного устройства в варианте свободных угловых колебаний испытываемой модели с двумя степенями свободы обеспечивается измерение мгновенных значений углов атаки α, скольжения β и соответствующих им значений четырех компонент аэродинамической силы и момента: сил X, Y и Z и момента Мх, что позволяет определить значения коэффициентов лобового сопротивления cx подъемной cy и боковой cz сил, момента крена mx и их зависимость от углов атаки α и скольжения β. Определение комплекса коэффициентов статических и динамических производных  и
и  ,
,  и
и  моментов тангажа mz и рыскания my осуществляется из анализа характера результатов изменения угловых движений при свободных колебаниях испытываемой модели по известным методикам. В результате обеспечивается определение комплекса аэродинамических характеристик при динамическом изменении углов атаки α и скольжения β испытываемой модели.
моментов тангажа mz и рыскания my осуществляется из анализа характера результатов изменения угловых движений при свободных колебаниях испытываемой модели по известным методикам. В результате обеспечивается определение комплекса аэродинамических характеристик при динамическом изменении углов атаки α и скольжения β испытываемой модели.
При реализации разработанного устройства в варианте свободных угловых колебаний модели с тремя степенями свободы обеспечивается измерение мгновенных значений трех компонент аэродинамической силы (и зависимость коэффициентов лобового сопротивления cx подъемной cy и боковой cz сил от углов атаки α, скольжения β и крена ϕ, либо - от частоты вращения модели по углу ϕ). Определение комплекса коэффициентов статических и динамических производных  и
и  ,
,  и
и  ,
,  моментов тангажа mz, рыскания my и крена mx осуществляется из анализа характера изменения угловых движений (их частот и амплитуд) при динамическом изменении углов атаки α, скольжения β и крена ϕ испытываемой модели по известным методикам.
моментов тангажа mz, рыскания my и крена mx осуществляется из анализа характера изменения угловых движений (их частот и амплитуд) при динамическом изменении углов атаки α, скольжения β и крена ϕ испытываемой модели по известным методикам.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 2013 |
|
RU2539763C1 |
| Устройство для исследования нестационарных аэродинамических характеристик модели в аэродинамической трубе | 2019 |
|
RU2717748C1 |
| Устройство для изменения положения модели в рабочей части аэродинамической трубы | 2019 |
|
RU2708680C1 |
| УСТРОЙСТВО ДЛЯ УГЛОВЫХ И ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1994 |
|
RU2102714C1 |
| Устройство для изменения положения модели в рабочей части аэродинамической трубы | 2018 |
|
RU2690097C1 |
| Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, модель планирующего парашюта для испытаний в аэродинамической трубе, способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2017 |
|
RU2655713C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ МОДЕЛИ В РАБОЧЕЙ ЧАСТИ АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2016 |
|
RU2629696C1 |
| Устройство для изменения положения модели в рабочей части аэродинамической трубы | 2019 |
|
RU2708681C1 |
| УСТРОЙСТВО ПОВОРОТА МОДЕЛИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1972 |
|
SU418129A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЭРОДИНАМИЧЕСКОГОКАЧЕСТВА МОДЕЛИ | 1972 |
|
SU435472A1 |

Изобретение относится к экспериментальной аэродинамике, в частности к устройствам для испытания моделей летательных аппаратов в аэродинамических трубах, и может быть использовано для определения комплекса стационарных и нестационарных аэродинамических характеристик летательных аппаратов. Устройство содержит адаптер с узлом крепления испытываемой модели, установленный с помощью шарнира с возможностью свободного поворота относительно поперечной оси в заданных пределах на донной державке, размещаемой в рабочей части аэродинамической трубы, датчик углового положения адаптера с чувствительным элементом и якорем, силоизмерительный элемент, расположенный на передней части державки позади шарнира, и механизм установки и пуска модели с заданного начального угла в виде размещенного в теле державки пневмоцилиндра, шток которого взаимодействует с фиксатором и соединен с ловителем в виде обращенного к адаптеру раструба с наклонными и продольными относительно оси державки контактными поверхностями, взаимодействующими с центральной частью кулачка, закрепляемого на адаптере, фиксатор выполнен в виде перемещаемой вдоль державки втулки, взаимодействующей с периферийными частями кулачка. Также устройство содержит дополнительный шарнир, обеспечивающий свободный поворот адаптера в заданных пределах вокруг поперечной оси, перпендикулярной оси основного шарнира, и датчик углового положения адаптера в плоскости поворота дополнительного шарнира с якорем и чувствительным элементом. Чувствительный элемент установлен на державке по оси основного шарнира, а поверхность закрепленного на адаптере якоря, обращенная к чувствительному элементу, выполнена в виде цилиндра, ось которого параллельна оси дополнительного шарнира и смещена относительно оси основного, и сменные клиновые проставки между узлом крепления испытываемой модели и корпусом адаптера обеспечивают пересечение продольной оси узла крепления модели и точки пересечения осей указанных шарниров. При этом раструб ловителя механизма установки и пуска модели выполнен в виде воронки с конической и цилиндрической поверхностями, соосными со штоком пневмоцилиндра указанного механизма, а центральная часть кулачка выполнена в виде соответствующего цилиндрической поверхности ловителя цилиндрического пальца со сферической законцовкой. Технический результат заключается в расширении номенклатуры определяемых аэродинамических характеристик ЛА и приближении условий испытаний к условиям их натурного полета, в котором угловые колебания ЛА носят пространственный характер. 1 з.п. ф-лы, 13 ил. 
1. Устройство для испытаний моделей летательных аппаратов в аэродинамических трубах, содержащее адаптер с узлом крепления испытываемой модели, установленный с помощью шарнира с возможностью свободного поворота относительно поперечной оси в заданных пределах на донной державке, размещаемой в рабочей части аэродинамической трубы, датчик углового положения адаптера с чувствительным элементом и якорем, силоизмерительный элемент, расположенный на передней части державки позади шарнира, и механизм установки и пуска модели с заданного начального угла в виде размещенного в теле державки пневмоцилиндра, шток которого взаимодействует с фиксатором и соединен с ловителем в виде обращенного к адаптеру раструба с наклонными и продольными относительно оси державки контактными поверхностями, взаимодействующими с центральной частью кулачка, закрепляемого на адаптере, а фиксатор выполнен в виде перемещаемой вдоль державки втулки, взаимодействующей с периферийными частями кулачка, отличающееся тем, что в него введены дополнительный шарнир, обеспечивающий свободный поворот адаптера в заданных пределах вокруг поперечной оси, перпендикулярной оси основного шарнира, датчик углового положения адаптера в плоскости поворота дополнительного шарнира с якорем и чувствительным элементом, в котором чувствительный элемент установлен на державке по оси основного шарнира, а поверхность закрепленного на адаптере якоря, обращенная к чувствительному элементу, выполнена в виде цилиндра, ось которого параллельна оси дополнительного шарнира и смещена относительно оси основного, и сменные клиновые проставки между узлом крепления испытываемой модели и корпусом адаптера, обеспечивающие пересечение продольной оси узла крепления модели и точки пересечения осей указанных шарниров, при этом раструб ловителя механизма установки и пуска модели выполнен в виде воронки с конической и цилиндрической поверхностями, соосными со штоком пневмоцилиндра указанного механизма, а центральная часть кулачка выполнена в виде соответствующего цилиндрической поверхности ловителя цилиндрического пальца со сферической законцовкой.
2. Устройство по п. 1, отличающееся тем, что в него введены второй дополнительный шарнир, обеспечивающий свободный поворот узла крепления испытываемой модели вокруг продольной оси с выполненным на ней фланцем, соединяемым посредством указанной клиновой проставки с адаптером, и дополнительный датчик угла поворота модели вокруг продольной оси с установленным на указанном фланце чувствительным элементом, взаимодействующим с размещенным на торцовой поверхности узла крепления испытываемой модели якорем, выполненным в виде радиально ориентированных остроконечных зубцов заданного шага, один из которых притуплен.
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 2013 |
|
RU2539763C1 |
| N.V | |||
| Golubin, V.V | |||
| Kislykh, V.I | |||
| Lagutin, V.M | |||
| Mikhailov | |||
| Methods and Means of Studying Dynamic Stability Characteristics of Hypersonic Flying Vehicles Used in Piston Gasdynamic Facilities, Proceedings of the 7-th International Conference on Methods of Aerophysical Research, Novosibirsk, Russia, 1994, part 1, pp.98-103 | |||
| V.I | |||
| Lagutin, V.I | |||
| Lapygin, S.L | |||
| Zolotarev | |||
| Strain-Gauge Balances for Free Oscillation Tests, Proceedings of the 5th International Symposium on Strain Gage Balances, ONERA, France, 2006 | |||
| УСТРОЙСТВО для ВВОДА МОДЕЛИ в РАБОЧИЙ ПОТОК АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 0 |
|
SU343175A1 |

