Предложение относится к области экспериментальной аэрогазодинамики и может быть использовано для определения газодинамических нагрузок на модели летательных аппаратов с работающими двигателями при моделировании и экспериментальном исследовании струйного взаимодействия в процессах разделения высотных ступеней ракет-носителей, отделения космических аппаратов от разгонных блоков, причаливания, стыковки и расстыковки космических аппаратов на орбите, посадки космических аппаратов на поверхность планет с разреженной атмосферой и старта с них.
Известна газодинамическая вакуумная камера для исследования газодинамического и теплового воздействия на летательные аппараты струй работающих двигательных установок в задачах обеспечения орбитальных стыковок - расстыковок и посадки на поверхность Луны, работающая в режиме наполнения и содержащая вакуумную камеру, системы вакуумирования, газообеспечения, управления и измерений, исследуемую модель летательного аппарата и подключенное к системе измерений тензометрическое силоизмерительное устройство (Бачин А.А., Богомолов В.П., Козловский В.А. и др. «Применение многокомпонентных тензодинамометров в задачах, связанных с исследованием Луны». Космонавтика и ракетостроение, 2013, вып. 3 (72), с. 63-69).
Известна также являющаяся наиболее близким техническим решением, выбранным в качестве прототипа, газодинамическая барокамера, предназначенная для модельных исследований и определения газодинамического нагружения летательных аппаратов, работающая в режиме наполнения и содержащая вакуумную камеру, системы вакуумирования, газообеспечения, управления и измерений, подключенное к системе измерений силоизмерительное устройство, активную модель летательного аппарата с сопловым блоком двигательной установки (ДУ), соединенным с трубопроводом системы газообеспечения, пассивную модель (отделяемой ступени) и координатник, размещенный в рабочей зоне вакуумной камеры (Бачин А.А., Мазин И.Н., Прочухаев М.В. и др. «Газодинамическая барокамера У-22 ФГУП ЦНИИмаш». Космонавтика и ракетостроение, 2015, вып. 4(83), с. 73-80).
Недостатком известной газодинамической барокамеры являются ее ограниченные экспериментальные возможности, обусловленные конструктивными особенностями. В частности, отсутствует возможность определения силового воздействия на активную модель летательного аппарата струй собственной ДУ, отраженных от отделяемой (пассивной) модели или от поверхности посадки (старта). Имеющийся координатник, обеспечивающий фиксированную необходимую пространственную ориентацию и положение пассивной модели относительно соплового блока активной модели, не позволяет в ходе эксперимента воспроизводить относительное перемещение моделей и в одном эксперименте можно получать экспериментальные данные только для одного фиксированного расстояния между моделями.
Задачей, на решение которой направлено предложенное техническое решение, является расширение экспериментальных возможностей газодинамической барокамеры.
Технический результат, достигаемый данным предложением, заключается в возможности измерения при кратковременном эксперименте силового воздействия на активную модель летательного аппарата струй собственной ДУ, отраженных от пассивной модели или от поверхности посадки (старта), моделирования скорости относительного перемещения активной и пассивной моделей летательного аппарата и получения экспериментальных данных для разных расстояний между активной и пассивной моделями.
Этот результат достигается тем, что в газодинамической барокамере, содержащей вакуумную камеру, системы вакуумирования, газообеспечения, управления и измерений, подключенное к системе измерений силоизмерительное устройство, активную модель летательного аппарата с сопловым блоком, соединенным с трубопроводом системы газообеспечения, пассивную модель и координатник, размещенный в рабочей зоне вакуумной камеры, координатник снабжен установленным на его выходе и подключенным к системам управления и измерений быстродействующим сервомеханизмом линейного перемещения с встроенным датчиком перемещения его штока, на котором закреплена пассивная модель, а активная модель летательного аппарата снабжена выполненной по форме его кормовой части тонкостенной оболочкой, отделенной зазором от соплового блока и закрепленной на силоизмерительном устройстве, корпус которого выполнен в виде соосных колец, соединенных симметрично размещенными вокруг их оси измерительными элементами, при этом упомянутый корпус охватывает с зазором сопловой блок и трубопровод и установлен соосно сопловому блоку.
При необходимости исследования газодинамических вопросов посадки летательного аппарата на поверхность планет с разреженной атмосферой и старта с них пассивная модель выполнена в виде имитатора фрагмента поверхности посадки (старта) летательного аппарата.
Техническая сущность предложения заключается в обеспечении возможности расширения номенклатуры проводимых исследований при кратковременном (~0,1 с) эксперименте за счет возможности изменения с заданной скоростью расстояния между исследуемыми моделями при моделировании процессов разделения высотных ступеней ракет-носителей, отделения космических аппаратов от разгонных блоков, причаливания, стыковки и расстыковки космических аппаратов на орбите, посадки летательного аппарата на поверхность планет с разреженной атмосферой и старта с них и измерения импульсной газодинамической нагрузки на активную модель от струй соплового блока, отраженных от пассивной модели. Это обеспечивается конструктивными отличиями предложенной газодинамической барокамеры. В частности, возможность измерения импульсной газодинамической нагрузки на активную модель от струй соплового блока достигается за счет конструктивного исполнения активной модели и силоизмерительного устройства, которое обеспечивает развязку исследуемой части активной модели от соплового блока, уменьшение ее массы, повышение жесткости силоизмерительного устройства и его помехозащищенность к ударным и вибрационным нагрузкам, возникающим при импульсной подаче рабочего газа высокого давления в сопловой блок.
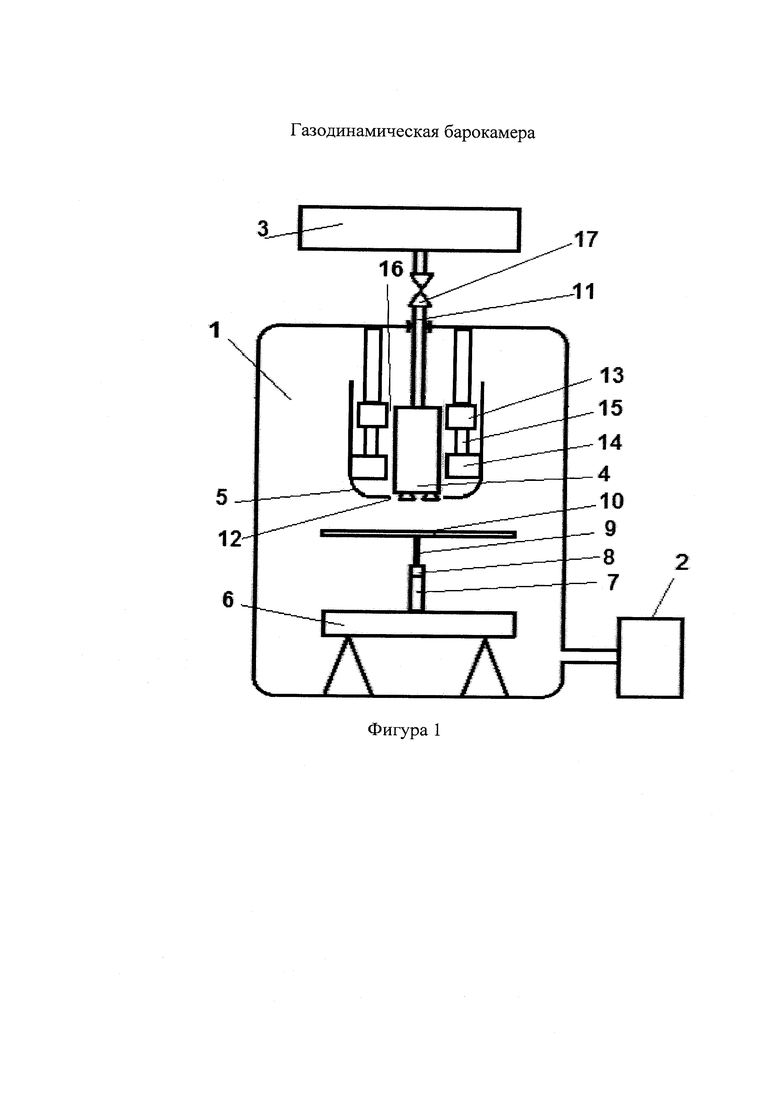
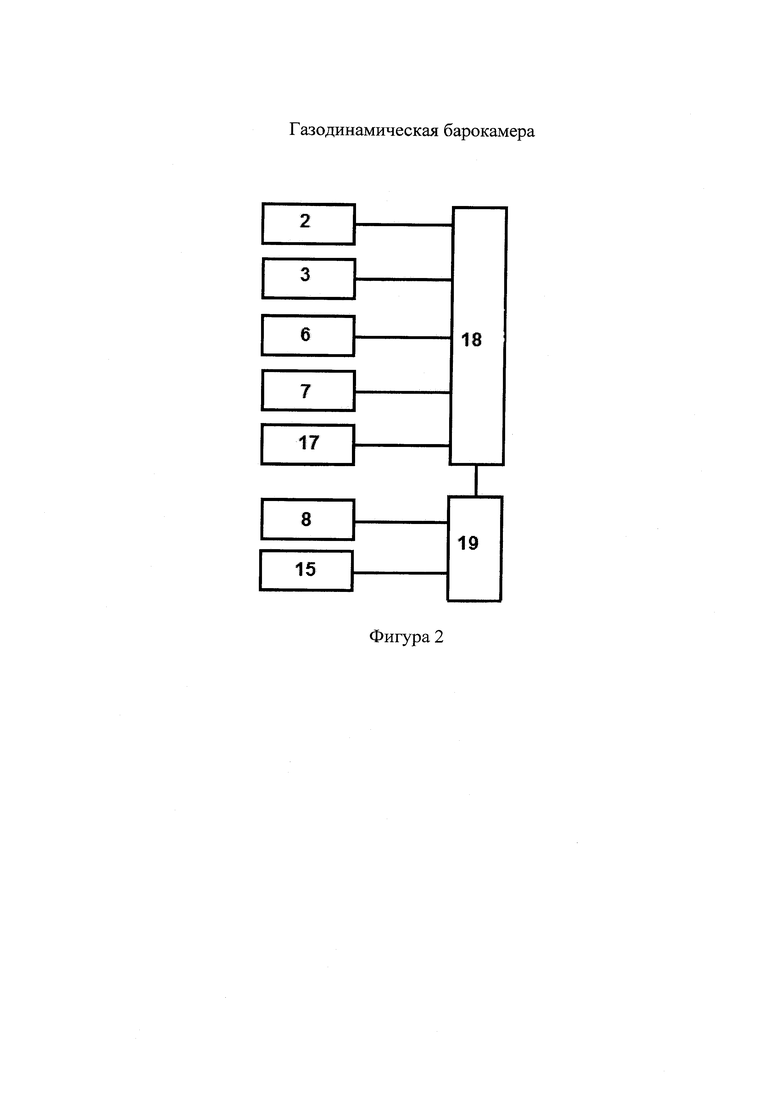
Пример выполнения газодинамической барокамеры поясняется фигурами 1 и 2. На фигуре 1 показана конструктивная схема газодинамической барокамеры, на фигуре 2 приведена блок - схема подключения к системам управления и измерений систем и устройств, входящих в состав газодинамической барокамеры.
Газодинамическая барокамера (фигура 1) содержит вакуумную камеру 1, систему 2 вакуумирования, систему 3 газообеспечения, активную модель летательного аппарата с сопловым блоком 4, снабженную тонкостенной оболочкой 5, координатник 6, быстродействующий сервомеханизм 7 линейного перемещения с встроенным датчиком 8 перемещения штока 9, пассивную модель 10. Сопловой блок 4 соединен с трубопроводом 11 системы газообеспечения 3. Оболочка 5 активной модели отделена зазором 12 от соплового блока 4 и закреплена на силоизмерительном устройстве, корпус которого выполнен в виде соосных колец 13 и 14, соединенных симметрично размещенными вокруг их оси измерительными элементами 15. Корпус силоизмерительного устройства охватывает с зазором 16 сопловой блок 4 и трубопровод 11 и установлен соосно сопловому блоку 4. Пассивная модель 10 закреплена на штоке 9 сервомеханизма 7, который установлен на выходе координатника 6, закрепленного в рабочей зоне вакуумной камеры 1. Система газообеспечения 3 имеет быстродействующее запорное устройство 17 (на основе разрывной мембраны, как в прототипе).
В состав газодинамической барокамеры (фигура 2) входят также система 18 управления и система 19 измерений. К системе 18 управления подключены система 2 вакуумирования, система 3 газообеспечения, координатник 6, сервомеханизм 7, быстродействующее запорное устройство 17 и система 19 измерений. В состав системы измерений 19 включены датчик 8 перемещения штока 9 сервомеханизма 7 и измерительные элементы 15 силоизмерительного устройства.
Проведение эксперимента в газодинамической барокамере осуществляется следующим образом. С помощью координатника 6 и сервомеханизма 7 устанавливается начальное положение пассивной модели 10 относительно соплового блока 4 активной модели летательного аппарата. В канале управления сервомеханизмом 7 задаются исходные данные: время задержки включения сервомеханизма после прихода запускающего сигнала, значения скорости и хода штока 9, а также значения ускорения и торможения штока. После проверки готовности всех систем вакуумная камера 1 откачивается системой 2 вакуумирования до давления, заданного программой эксперимента. В системе 3 газообеспечения с помощью системы 18 управления создается требуемое по программе давление рабочего газа. После этого с системы 18 управления подается запускающий сигнал в систему 19 измерений, на быстродействующее запорное устройство 17 и в канал управления сервомеханизмом 7. По этому сигналу система 19 измерений включается на режим регистрации измеряемых параметров, а в системе 3 газообеспечения срабатывает быстродействующее запорное устройство 17, через которое рабочий газ по трубопроводу 11 поступает в сопловой блок 4 активной модели летательного аппарата. Истекающие из соплового блока 4 струи взаимодействуют с пассивной моделью 10 и воздействуют на оболочку 5 активной модели летательного аппарата. Газодинамическая нагрузка, действующая на оболочку 5 активной модели летательного аппарата, измеряется с помощью измерительных элементов 15 силоизмерительного устройства. По истечении времени задержки включается сервомеханизм 7 и пассивная модель 10, закрепленная на штоке 9 сервомеханизма, приходит в движение с заданной скоростью. Перемещение штока 9, определяющее изменение расстояния между моделями, измеряется встроенным в сервомеханизм датчиком 8. При изменении расстояния между активной и пассивной моделями изменяется регистрируемая газодинамическая нагрузка на оболочку 5 активной модели.
При проведении эксперимента, также как в прототипе, регистрируются давление в системе 3 газообеспечения, сопловом блоке 4 и вакуумной камере 1 (датчики этих параметров на фигурах не показаны).
Отработав заданное программой перемещение штока, сервомеханизм останавливается.
Зарегистрированная информация позволяет определить зависимость газодинамической нагрузки от параметров струй и расстояния между моделями при заданной скорости перемещения пассивной модели.
При исследовании посадки летательного аппарата на поверхность планет с разреженной атмосферой и старта с них пассивная модель выполнена в виде имитатора фрагмента поверхности посадки (старта) летательного аппарата, взаимодействующего со струями соплового блока активной модели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Газодинамическая барокамера | 2021 |
|
RU2770320C1 |
| Способ и летательный аппарат для перемещения в атмосфере планет со скоростями выше первой космической и высокоинтегрированный гиперзвуковой летательный аппарат (варианты) для осуществления способа | 2012 |
|
RU2618831C2 |
| ТРАНСПОРТНАЯ СИСТЕМА ВЕРТИКАЛЬНОГО СТАРТА | 1994 |
|
RU2094330C1 |
| ИОННЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ, СПОСОБ ЕГО РАБОТЫ И КОРОНИРУЮЩИЙ ЭЛЕКТРОД | 2020 |
|
RU2747067C1 |
| КОМБИНИРОВАННЫЙ ИОННЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ И КОРОНИРУЮЩИЙ ЭЛЕКТРОД | 2020 |
|
RU2745180C1 |
| ИОННЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2724375C1 |
| ИОННЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2738136C1 |
| КАТАПУЛЬТНОЕ КРЕСЛО | 1989 |
|
SU1760731A1 |
| КОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2001 |
|
RU2211176C2 |
| ПЛАЗМЕННО-РАКЕТНЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2733076C1 |
Предложение относится к области экспериментальной аэрогазодинамики и может быть использовано для определения газодинамических нагрузок на модели летательных аппаратов с работающими двигателями при моделировании и экспериментальном исследовании струйного взаимодействия в процессах разделения высотных ступеней ракет-носителей, отделения космических аппаратов от разгонных блоков, причаливания, стыковки и расстыковки космических аппаратов на орбите, посадки космических аппаратов на поверхность планет с разреженной атмосферой и старта с них. В газодинамической барокамере, содержащей вакуумную камеру, системы вакуумирования, газообеспечения, управления и измерений, подключенное к системе измерений силоизмерительное устройство, активную модель летательного аппарата с сопловым блоком, соединенным с трубопроводом системы газообеспечения, пассивную модель и установленный в рабочей зоне вакуумной камеры координатник, координатник снабжен установленным на его выходе и подключенным к системам управления и измерений быстродействующим сервомеханизмом линейного перемещения с встроенным датчиком перемещения его штока, на котором закреплена пассивная модель, а активная модель летательного аппарата снабжена выполненной по форме его кормовой части тонкостенной оболочкой, отделенной зазором от соплового блока и закрепленной на силоизмерительном устройстве, корпус которого выполнен в виде соосных колец, соединенных симметрично размещенными вокруг их оси измерительными элементами, при этом упомянутый корпус охватывает с зазором сопловой блок и трубопровод и установлен соосно сопловому блоку. Технический результат – обеспечение возможности при кратковременном эксперименте измерения силового воздействия на активную модель летательного аппарата струй собственной двигательной установки, отраженных от пассивной модели или от поверхности посадки (старта), моделирования скорости относительного перемещения активной и пассивной моделей летательного аппарата и получения экспериментальных данных для разных расстояний между активной и пассивной моделями. 1 з.п. ф-лы, 2 ил.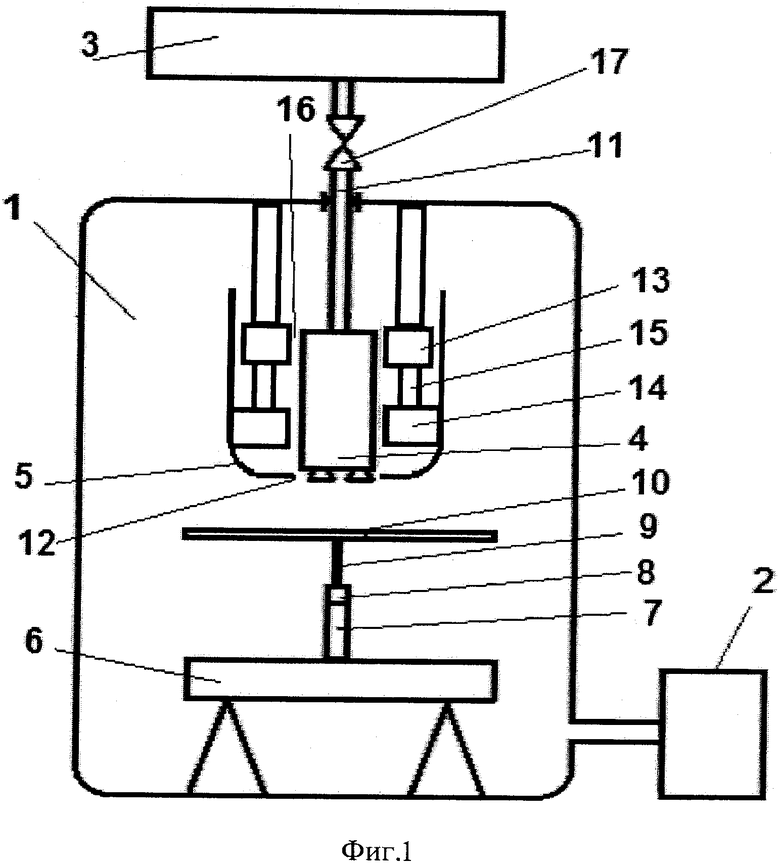
1. Газодинамическая барокамера, содержащая вакуумную камеру, системы вакуумирования, газообеспечения, управления и измерений, подключенное к системе измерений силоизмерительное устройство, активную модель летательного аппарата с сопловым блоком, соединенным с трубопроводом системы газообеспечения, пассивную модель и установленный в рабочей зоне вакуумной камеры координатник, отличающаяся тем, что координатник снабжен установленным на его выходе и подключенным к системам управления и измерений быстродействующим сервомеханизмом линейного перемещения с встроенным датчиком перемещения его штока, на котором закреплена пассивная модель, а активная модель летательного аппарата снабжена выполненной по форме его кормовой части тонкостенной оболочкой, отделенной зазором от соплового блока и закрепленной на силоизмерительном устройстве, корпус которого выполнен в виде соосных колец, соединенных симметрично размещенными вокруг их оси измерительными элементами, при этом упомянутый корпус охватывает с зазором сопловой блок и трубопровод и установлен соосно сопловому блоку.
2. Газодинамическая барокамера по п. 1, отличающаяся тем, что пассивная модель выполнена в виде имитатора фрагмента поверхности посадки (старта) летательного аппарата.
| Бачин А.А., Мазин И.Н., Прочухаев М.В | |||
| и др | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Космонавтика и ракетостроение, 2015, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Бачин А.А., Богомолов В.П., Козловский В.А | |||
| и др | |||
| "Применение многокомпонентных тензодинамометров в задачах, связанных с исследованием Луны" | |||
| Космонавтика и ракетостроение, 2013, вып | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| СПОСОБ ИСПЫТАНИЙ РАЗДВИЖНОГО СОПЛА РАКЕТНОГО ДВИГАТЕЛЯ В БАРОКАМЕРЕ С ГАЗОДИНАМИЧЕСКОЙ ТРУБОЙ И СТЕНДОВОЕ РАЗДВИЖНОЕ СОПЛО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2482322C1 |
| US 5942682 A1, 24.08.1999. | |||

