Автоматизированное устройство для кормления водных животных относится к животноводству, а именно к устройствам для кормления водных животных, как пресноводных, так и морских.
За последние десятилетия все более широко распространение получают сухие сыпучие корма.
Известна автоматическая кормушка (авт.св. СССР 1165326, кл. А01К 7/06 1983 г., содержащая накопительный резервуар, приемную чашу, противовес с кинематической связью и эластичный патрубок с клапаном. Кормушка работает от усилия животного, нажимающего на лоток, который, наклоняясь, заполняется жидким кормом. Кормушка непригодна для раздачи сухого корма.
Известно устройство для выдачи корма животным, включающее прямоугольную рамку с закрепленным на верхней и нижней ее сторонах прутками, образующими решетку с шагом, по крайней мере, превышающим ширину губ животного, и контактирующую противоположной стороной от животного со стогом сена (SU 1287805 А1, 07.02.87). Недостатком известного устройства является то, что оно непригодно для раздачи сухого сыпучего корма.
Известен кормораздатчик, включающий бункер, установленный на шасси, а также механизм дозирования в виде блока битеров с поперечным транспортером (Омельченко А.А., Куцын Л.М. Кормораздающие устройства. М.: Машиностроение, 1971, стр. 7, 11, рис. 2, рис. 4а, аналог). Недостатком данного кормораздатчика является высокая неравномерность выдачи корма (до 40%), обусловленная обрушением задней стенки кормового бурта в конце раздачи.
Наиболее близким к предложенному устройству по технической сущности и достигаемому результату является кормораздатчик, включающий контейнер для корма, дозирующее устройство с исполнительным механизмом в виде блока биттеров и устройство управления. (Мельников С.В. Механизация и автоматизация животноводческих ферм. Л.: Колос, 1978. - 560 с. Стр. 363-365. Прототип). Недостатком данного кормораздатчика является неэкономичность, поскольку сухой корм при подаче в воду плавает и может быть съеден чайками, что приводит к его перерасходу.
Задачей предложенного изобретения является создание автоматизированного устройства, позволяющей снизить нецелевое расходование корма, повысить экономичность раздачи корма.
Технический результат, который может быть получен при использовании изобретения, выражается в повышении экономичности раздачи корма.
Указанный технический результат достигается тем, что известное устройство содержащее контейнер для корма, дозирующее устройство с исполнительным механизмом, устройство управления и устройство для принудительного погружения в воду выделенной порции корма, в виде установленной с возможностью вертикального перемещения чаши с обращенными вниз краями, соединенной с приводом, подключенным к устройству управления, дозирующее устройство включает затвор, дозирующую рамку и основание, при этом подача выделенной порции корма под чашу обеспечивает горизонтальное перемещение рамки по основанию посредством исполнительного механизма. Кроме того, устройство управления содержит таймер для его включения в заданные промежутки времени.
Кроме того, предложенное устройство дополнительно содержит средство, включающее работу дозирующего устройства под действием усилия водного животного, соединенное с устройством управления.
Кроме того, средство, включающее работу дозирующего устройства, выполнено в виде погруженного в воду рычага, соединенного с концевым выключателем.
Кроме того, поверхность рычага выполнена с покрытием из мягкого упругого материала, например, губчатой резины.
Кроме того, средство, включающее работу дозирующего устройства, выполнено в виде выключателя с тяговым шнурком.
Благодаря введению устройства для принудительного погружения в воду выделенной порции корма другие животные, например, чайки не смогут клевать корм с поверхности воды.
Благодаря тому, что обращенные книзу края чаши позволяют полностью погрузить корм под воду, птицы не имеют возможности его расклевать.
Благодаря тому, что в устройстве управления содержится таймер, включающий его в заданные промежутки времени, предотвращается перерасход корма при постоянном захвате зубами водного животного конца тягового шнурка или частым нажатиям на рычаг включения.
Благодаря тому, что предложенное устройство дополнительно содержит средство, включающее работу дозирующего устройства под действием усилия водного животного, соединенное с устройством управления достигается полная автоматизация процесса кормления и сокращается расход корма, поскольку водное животное приводит устройство в действие только когда оно голодно.
Благодаря выполнению средства, включающего работу дозирующего устройства в виде погруженного в воду рычага, соединенного с концевым выключателем, обеспечивается возможность приведения устройства в действие рыбами и водным зверем.
Благодаря тому, что поверхность рычага выполнена с покрытием из мягкой резины, предотвращается травмирование водных животных при их взаимодействии с рычагом.
Благодаря тому, что средство, включающее работу дозирующего устройства, выполнено в виде выключателя с тяговым шнурком, предотвращается включение дозатора рыбами, если желательно кормить только водных зверей.
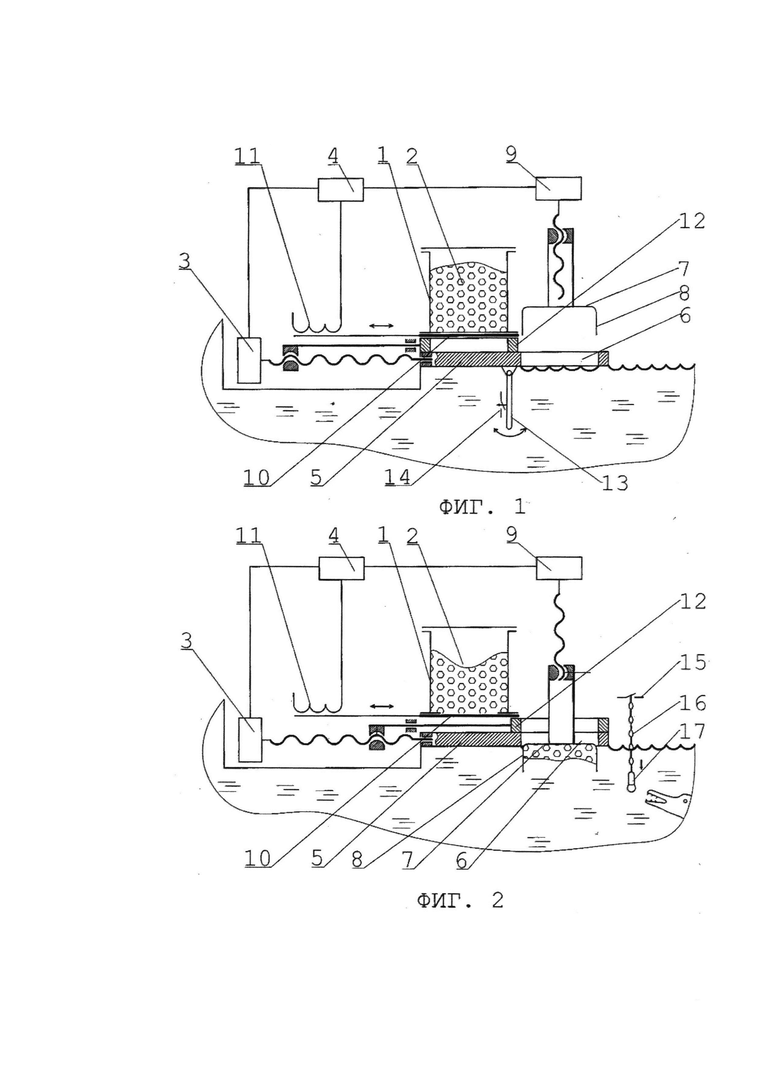
На фиг. 1 изображен пример конкретного выполнения устройства, находящегося в состоянии ожидания запроса на кормление.
На фиг. 2 изображено устройство в момент, когда порция корма подана в воду.
Предложенное автоматизированное устройство для кормления водных животных, содержит контейнер 1 для сухого корма 2, дозирующее устройство с исполнительным механизмом 3, подключенным к устройству управления 4, расположенное под контейнером 1 основание 5, частично нависающее над водой и имеющее в этой части сквозное отверстие (окно) 6. Над окном 6 установлена с возможностью вертикального перемещения чаша 7 с обращенными вниз краями (бортами) 8, соединенная с исполнительным механизмом 9, подключенным к устройству управления 4. Конфигурация и размеры чаши 7 в сечении горизонтальной плоскостью близки к конфигурации и размерам окна 6, но немного меньше их так, чтобы чаша 7 при ее вертикальном перемещении могла свободно проходить через отверстие 6.
В нижней части контейнера 1 имеется затвор 10, выполненный, как показано в качестве примера на чертежах, в виде шибера, и снабженный исполнительным механизмом 11, соединенным с устройством управления 4. В качестве примера, на чертежах исполнительный механизм 11 изображен в виде тягового электромагнита, а исполнительные механизмы 3 и 9 - в виде ходовых винтов с электроприводом.
Под затвором 10, между ним и основанием 5 расположена дозирующая рамка 12, объем окна, в которой определяет объем отмеряемой порции корма. Рамка 12 установлена с возможностью горизонтального перемещения по основанию 5 посредством исполнительного механизма 3. Все вместе: затвор 10, рамка 12, основание 5 и исполнительные механизмы 3 и 11 образуют дозирующее устройство.
Вблизи предложенного автоматического устройства или прямо под основанием 5 находится средство для включения устройства, рассчитанное на приведение его в действие усилием водного животного. Оно может быть выполнено в виде качающегося рычага 13, соединенного с концевым выключателем 14 (фиг. 1), либо в виде выключателя 15 с тяговым шнурком 16 (фиг. 2). Для предотвращения травмирования водного животного рычагом 13, его поверхность может быть покрыта слоем мягкого упругого материала, например губчатой резины или пенополиуретана. В обоих вариантах выключатели соединены с устройством управления 4. Конец тягового шнурка снабжен грушей 17 из прочного упругого материала, предназначенной для захвата зубами водного зверя (дельфина, тюленя). Устройство по первому из вариантов может приводиться в действие, как рыбой, так и водным зверем. Если кормление рыб нежелательно, то используют второй вариант с тяговым шнурком.
Предложенное устройство функционирует следующим образом.
Корм 2 насыпают в контейнер 1. По желанию оператора или от воздействия морского животного на рычаг 13 или тяговый шнурок 15 устройство управления 4 приводит в действие. В момент кормления воздействием устройства управления 4 на исполнительный механизм 3, который отодвигает затвор (шибер) 10, и наполняют рамку 12 сухим кормом 2. После наполнения рамки 12 сухим кормом 2 устройство управления 4 закрывает затвор 10 и, воздействуя на исполнительный механизм 3, двигает рамку 12 с сухим кормом 2 под чашу 7. Корм, ограниченный стенками рамки 12, плавает на водной поверхности до тех пор, пока управляемый устройством 4 исполнительный механизм 11 не опустит чашу 7 так, что она, пройдя через окно в рамке 12, утопит корм в воду и будет закрывать его сверху, чтобы он не всплывал и не расклевывался птицами.
Спустя назначенное время, управляющее устройство 4 через исполнительные механизмы 3 и 11 возвращает все элементы устройства в исходное положение. Устройство вновь готово к кормлению.
Работает предложенное устройство следующим образом.
Устройство приводится в действие как рыбой, так и водным зверем благодаря усилию водного животного, воздействующего своим телом на рычаг 13, соединенный с концевым выключателем 14. В тех случаях, когда кормление рыб нежелательно, для включения устройства предпочтительнее использовать выключатель с тяговым шнуром, поскольку рыбы не могут сообразить, как им пользоваться, а водные звери легко осваивают управление с помощью тягового шнурка, захватывая зубами его конец, снабженный грушей 17.
Во избежание перерасхода кормов, устройство управления может содержать таймер, включающий готовность устройства только в определенные промежутки времени. Число и продолжительность таких промежутков зависят от количества водных животных, состоящих на довольствии.
Технико-экономические преимущества заключаются в повышении эффективности кормления водных животных за счет повышения равномерности выдачи кормов, а также в полнорационном питании водного животного без участия человека, что существенно сокращает расходы на оплату труда рабочего персонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
| Устройство для кормления к многоярусным установкам | 1984 |
|
SU1286134A1 |
| Линия для раздачи кормов в рыбо-ВОдНыХ САдКАХ | 1979 |
|
SU843895A2 |
| Устройство для кормления к многоярусным установкам | 1989 |
|
SU1658939A1 |
| РАЗДАТЧИК КОРМОВ | 1998 |
|
RU2220568C2 |
| ВЕСОВОЙ ПОРЦИОННЫЙ РАЗДАТЧИК КОРМОВ | 1999 |
|
RU2165692C2 |
| Установка для раздачи кормов в рыбоводных садках | 1977 |
|
SU721044A1 |
| Устройство для кормления животных | 1985 |
|
SU1316608A1 |
| Кормораздатчик | 1982 |
|
SU1061777A1 |
| КОРМОРАЗДАТЧИК, В ЧАСТНОСТИ, ДЛЯ СВИНЕЙ | 1995 |
|
RU2145162C1 |
Изобретение относится к автоматическим кормушкам для кормления водных животных. Устройство включает контейнер для корма, дозирующее устройство с исполнительными механизмами, устройство управления и устройство для принудительного погружения в воду выделенной порции корма, в виде установленной с возможностью вертикального перемещения чаши с обращенными вниз краями, соединенной с приводом, подключенным к устройству управления. Дозирующее устройство включает затвор, дозирующую рамку и основание, при этом подачу выделенной порции корма под чашу обеспечивает горизонтальное перемещение рамки по основанию посредством исполнительного механизма. Изобретение позволяет снизить нецелевое расходование корма. 5 з.п. ф-лы, 2 ил.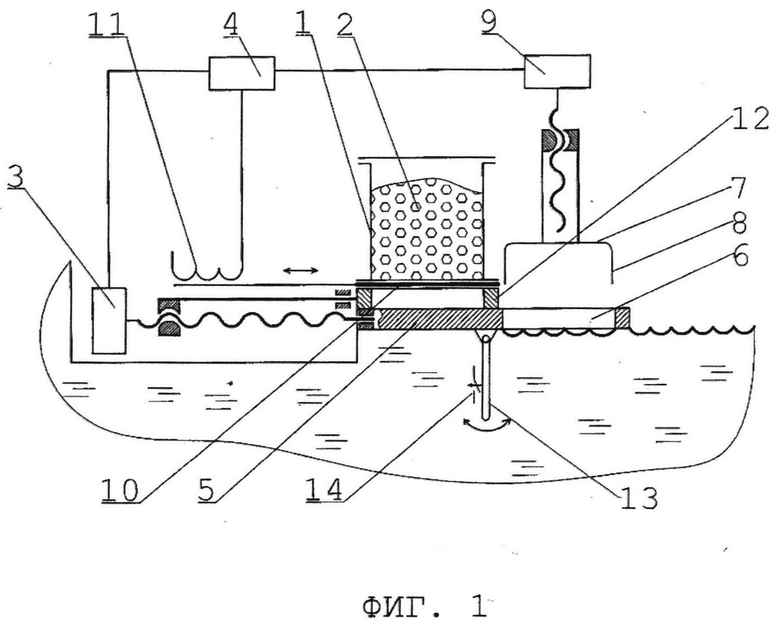
1. Автоматизированное устройство для кормления водных животных, содержащее контейнер для корма, дозирующее устройство с исполнительным механизмом, устройство управления и устройство для принудительного погружения в воду выделенной порции корма, в виде установленной с возможностью вертикального перемещения чаши с обращенными вниз краями, соединенной с приводом, подключенным к устройству управления, дозирующее устройство включает затвор, дозирующую рамку и основание, при этом подача выделенной порции корма под чашу обеспечивает горизонтальное перемещение рамки по основанию посредством исполнительного механизма.
2. Автоматизированное устройство по п. 1, отличающееся тем, что устройство управления содержит таймер для его включения в заданные промежутки времени.
3. Автоматизированное устройство по п. 1 или 2, отличающееся тем, что оно дополнительно содержит средство, включающее работу дозирующего устройства под действием усилия водного животного, соединенное с устройством управления.
4. Автоматизированное устройство по п. 3, отличающееся тем, что средство, включающее работу дозирующего устройства выполнено в виде погруженного в воду рычага, соединенного с концевым выключателем.
5. Автоматизированное устройство по п. 4, отличающееся тем, что поверхность рычага выполнена с покрытием из мягкого упругого материала.
6. Автоматизированное устройство по п. 3, отличающееся тем, что средство, включающее работу дозирующего устройства, выполнено в виде выключателя с тяговым шнурком.
| Устройство для раздачи кормов рыбам в водоемах | 1973 |
|
SU510208A1 |
| Устройство для раздачи корма рыбам | 1978 |
|
SU780828A1 |
| US 4270489 A1, 02.06.1981 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЛИЦА | 2006 |
|
RU2310382C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВЫСОКОТЕМПЕРАТУРНОГО СВЕРХПРОВОДНИКА В СИСТЕМЕ МЕДЬ-ОКСИД МЕДИ | 2010 |
|
RU2441936C1 |
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА КАНАЛЬНОГО УРАН-ГРАФИТОВОГО ЯДЕРНОГО РЕАКТОРА (ВАРИАНТЫ) | 2002 |
|
RU2222059C2 |
| СПОСОБ ПОЛУЧЕНИЯ п-ХЛОРФЕНОЛА | 0 |
|
SU187752A1 |
| US 7174849 B1, 13.02.2007. | |||

