со 00
|
Изобретение относится к электротехнике, в частности к автоматичес- кой точной синхронизации возбуждения синхронных генераторов переменного тока при включении их на параллельную работу.
Целью изобретения является ускорение процесса синхронизации, а также уменьшение износа участвующего в про цессе синхронизащш оборудования.
На фиг. 1 показаны зоны скольжения, имеющие место при синхронизации; на фиг.2 - векторная диаграмма напряжений синхронизируемых агрега- тов в i-й и ()-й моменты измерения; на фиг, 3 - &лок-схема алгоритма, поясняющая часть операций способа. ,
Фиг.1 показывает (без соблюдения масштаба по оси S)условное разделение скольжений, имеющих место при синхронизации, на несколько зон в зави- симости от величины и знака скольжения,
- 5,п S о : ,
и О S () зоны допустимых, для включения малых скольжений,где возможно зависание /SM«H/ - 0,1 Гц;
йЧЛ
. S 7 S
MHh
и (мии) S (-SBHA ) зоны допустимых для включения сколь- жений(5 в|,д ) (0,2-1)Гц,
S S вкй и S (3в.д) - зоны регулируемыхскольжений
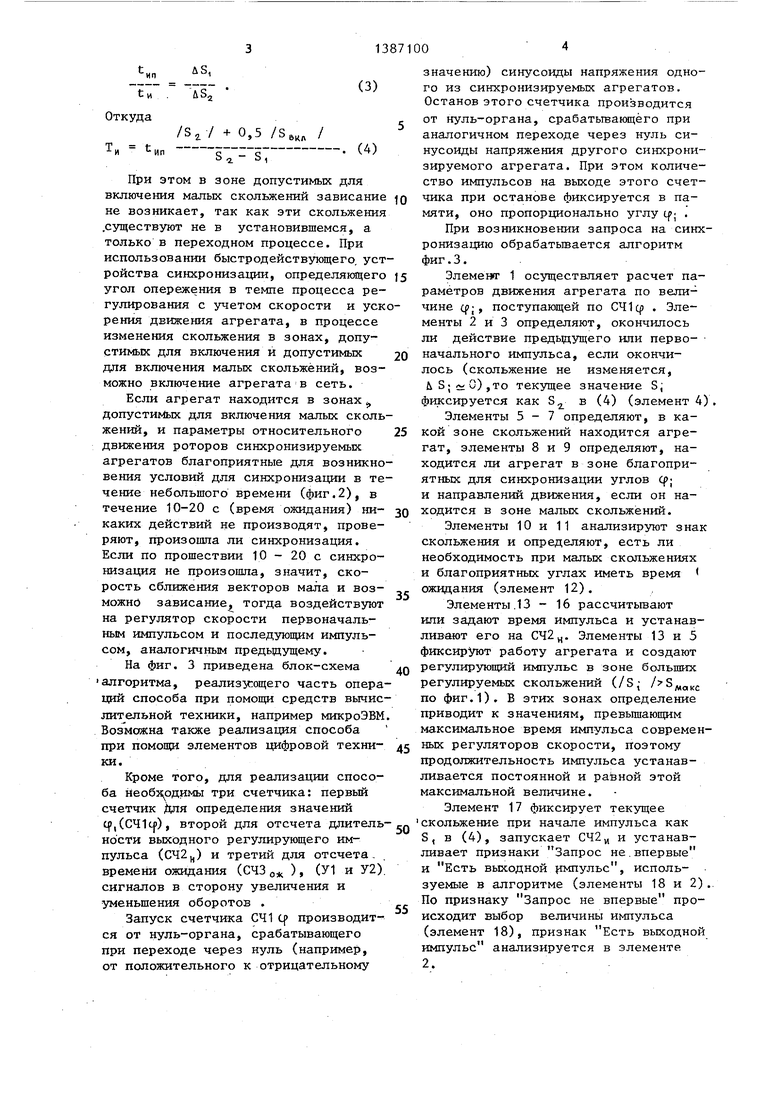
Фиг. 2 показывает векторную диаграмму напряжений U4 и К, холостого хода синхронизируемых агрегатов в i-й и (1+1)-й моменты измерения.
Анализирование векторной диаграм мы, параметров относительного движения агрегатов применительно к зоне малых скольжений дает возможность сделать вывод о наступлении зависания.
Свидетельствуют о наступлении зависания большая величина угла Ч увеличение с течением времени угла Ц) и малая скорость -уменьшения угла Cf при первоначальмых значениях, не позволяющих осуществить синхронизацию.
Сущность способа заключается в том, что фиксируют величину текущего
значения скольжения агрегата и определяют, в какой зоне скольжений по фиг. 1 находится агрегат. Если он находится в зоне допустимых для включения малых скольжений, где возможно зависание, дополнительно фиксируют текущее значение относительно угла сдвига фаз между роторами синхронизируемых агрегатов, а также направление и скорость их относительного движения. Далее сравнивают значения этих параметров и скольжения с величинами, при которых возможно включение агрегата без регулирования скорости по прошествии допустимого времени.
Если агрегат находится в зонах регулируемьк скольжений либо в зонах, допустимых для включения малых скольжений, но параметры относительного движения роторов синхронизируемых агрегатов свидетельствуют о возможности зависания, осуществляют небольшое первоначальное произвольное фиксированной величины воздействие на регулятор скорости агрегата, фиксируют окончание переходного процесса регулирования скорости и иэГмене- ние скольжения, вызванные этим воздействием, и по этим параметрам опре деляют величину последующего регулирующего воздействия, чтобы оно изменило скольжение от текущейвеличийы через нулевое скольжение до значений скольжения противоположного знака в зоне скольжения, допусти,мых для включения синхронизируемого агрегата без возникновения зависания.
Например, первоначальный регулирующий импульс длительностью t вызвал изменение скольжения от величины S, до величины S на величину S, (фиг.1)
fiS - S .J - Sj . V
Сопоставляя длительность первоначального импульса и вызванное им изменение скольжения, можно определить значение длительности следующего импульса t,,, которая необходима для изменения скольжения на такую величину &S, чтобы по окончании tj, агрегат имел скольжение в зоне допустимого для включения скольжений про тивоположного знака (пройдя при этом нулевое скольжение), например, скольжение Sg в середине этой
&S « /&г/ + 0,5 /S,,/; (2)
Д8,
is
/Si I + 0,5 /5бц„ / -----При этом в зоне допустимых для включения малых скольжений зависание не возникает, так как эти скольжения .существуют не в установившемся, а только в переходном процессе. При использовании быстродействующего, устройства синхронизации, определяющего угол опережения в темпе процесса регулирования с учетом скорости и ускрения движения агрегата, в процессе изменения скольжения в зонах, допустимых для включения и допустимых для включения малых скольжений, возможно включение агрегата в сеть.
Если агрегат находится в зонах ., допустимых для включения малых скольжений, и параметры относительного движения роторов синхронизируемых агрегатов благоприятные для возникновения условий для синхронизации в течение небольшого времени (фиг.2), в течение 10-20 с (время ожидания) ни- каких действий не производят, проверяют, произошла ли синхронизация. Если по прошествии 10 - 20 с синхронизация не произошла, значит, скорость сближения векторов мала и воз- можнд зависание, тогда воздействуют на регулятор скорости первоначальным импульсом и последующим импульсом, аналогичным предьщущему.
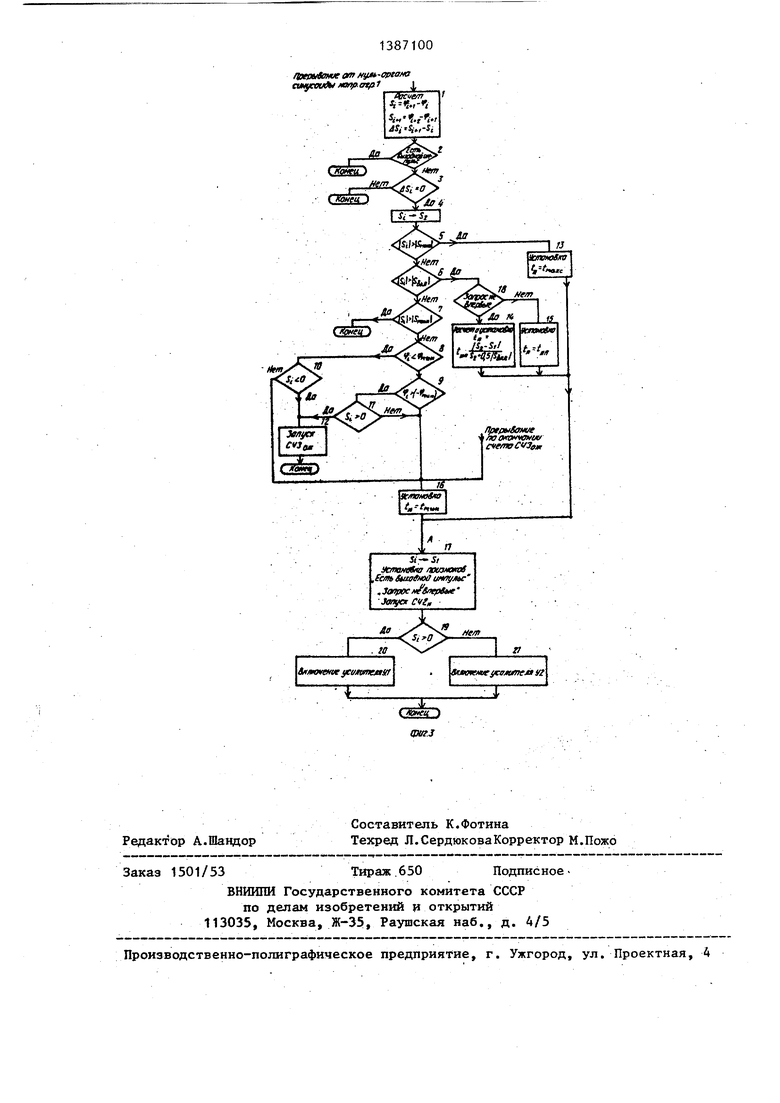
На фиг. 3 приведена блок-схема алгоритма, реализугощего часть операций способа при помощи средств вычислительной техники, например микроЭВМ Возмсясна также реализация способа при помощи элементов цифровой техни- ки.
Кроме того, для реализации способа необз одимы три счетчика: первый счетчик йля определения значений q),(C41cj)), второй для отсчета длитель кости выходного регулирующего импульса (СЧ2ц) и третий для отсчета . времени ожидания (СЧЗ о ), (У1 и У2) сигналов в сторону увеличения и уменьшения оборотов .
Запуск счетчика СЧ1 Ц производится от нуль-органа, срабатывающего при переходе через нуль (например, от положительного к отрицательному
JQ J5о2025зо AQ. 45
- 55
35
значению) синусоиды напряжения одного из синхронизируемых агрегатов. Останов этого счетчика производится от нуль-органа, срабатьгеающёго при аналогичном переходе через нуль синусоиды напряжения другого синхронизируемого агрегата. При этом количество импульсов на выходе этого счетчика при останове фиксируется в памяти, оно пропорционально углу .
При возникновении запроса на синхронизацию обрабатьгоается алгоритм фиг.3.
Элемент 1 осуществляет расчет параметров движения агрегата по величине ср; , поступающей по C41q) . Элементы 2 и 3 определяют, окончилось ли действие предыдущего или перво- начального импульса, если о кончи- лось (скольжение не изменяется, ),To текущее значение S; фиксируется как S в (4) (элемент 4).
Элементы 5-7 определяют, в какой зоне скольжений находится агрегат, элементы 8 и 9 определяют, находится ли агрегат в зоне благоприятных для синхронизации углов Cf; и направлений движения, если он находится в зоне малых скольжений.
Элементы 10 и 11 анализируют знак скольжения и определяют, есть ли необходимость при малых скольжениях и благоприятных углах иметь время ожидания (элемент 12).
Элементы.13 - 16 рассчитывают или задают время импульса и устанавливают его на СЧ2ц. Элементы 13 и 5 фиксируют работу агрегата и создают регулирующий импульс в зоне больших регулируемых скольжений (/S по фиг.1). В этих зонах определение приводит к значениям, превьш1ающим максимальное время импульса современных регуляторов скорости, поэтому продолжительность импульса устанавливается постоянной и равной этой максимальной величине.
Элемент 17 фиксирует текущее скольжение при начале импульса как S, в (4), запускает C42 и устанавливает признаки Запрос не.впервые и Есть выходной рмпульс, используемые в алгоритме (элементы 18 и 2).. По признаку Запрос не впервые про- ИСХОДИ.Т выбор величины импульса (элемент 18), признак Есть выходной импульс анализируется в элементе 2.
51387
Элементы 19 - 21 включают У1 и У2, отключение их производится по окончании счета времени импульса СЧ2. Элементы 16-21 осуществляют регулирование нри работе в зоне мальтх скольжений после реализации времени ожидания.
Формула изобретения
Способ регулирования скорости вращения ротора возбужденного синхронного агрегата при автоматической точной синхронизации путем фиксации текущего значения скольжения и воздействия на регулятор скорости, отличающийся тем, что, с целью повьшения эффективности за
жения и сравнивают значения этих параметров с заданными если агрегат находится вне зон, допустимых для включения скольжений, либо в зонах, допустимых для включения малых скольжений, но дополнительно зафиксированные параметры свидетельствуют о невозможности синхронизации без регулирования скорости по прошествии допустимого времени, осуществляют первоначальное воздействие фиксировйн- ной величины на регулятор скорости агрегата, фиксируют окончание переходного процесса регулирования скорости и скольжение после окончания переходного процесса, и, если скольжение не находится в зоне допустимых для В1слючения скольжений, произ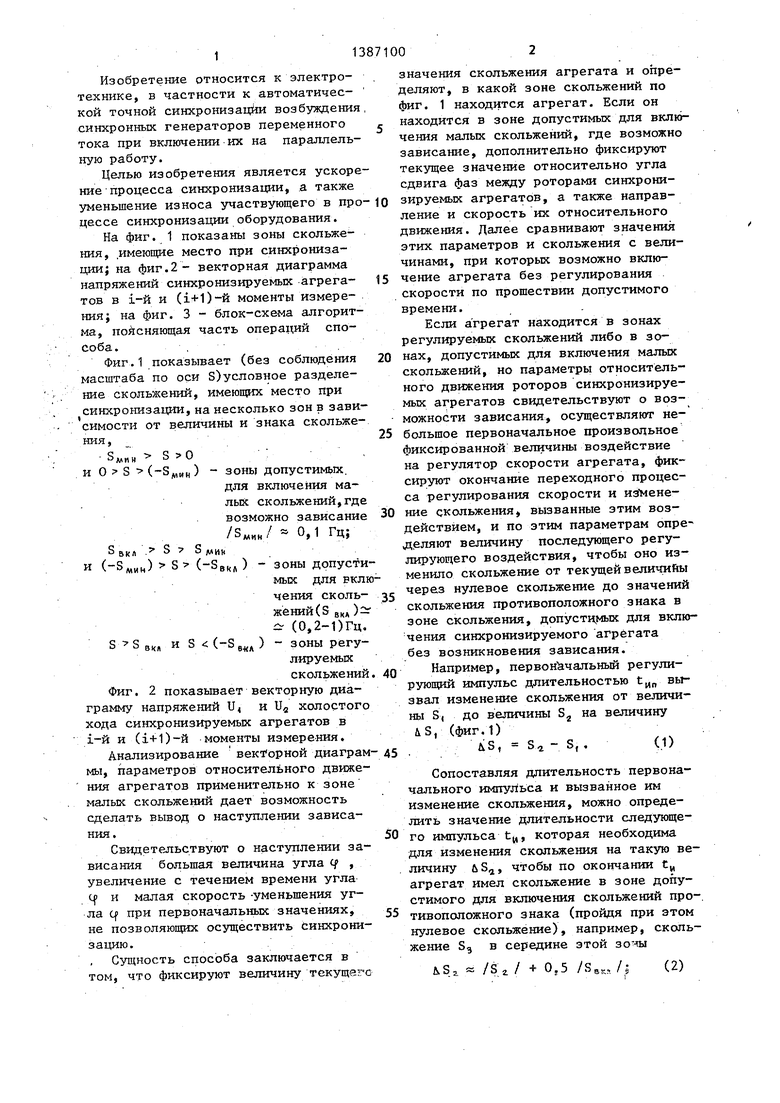

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ точной синхронизации синхронных генераторов | 1990 |
|
SU1718330A1 |
| Способ синхронизации возбуждённой синхронной машины с сетью | 2021 |
|
RU2770910C1 |
| Автоматический синхронизатор с постоянным углом опережения | 1982 |
|
SU1065957A2 |
| Импульсный синхронизатор | 1981 |
|
SU1023525A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2008 |
|
RU2359384C1 |
| Устройство точной синхронизации | 1987 |
|
SU1561145A1 |
| Синхронизатор с постоянным временем опережения | 1990 |
|
SU1820442A1 |
| Устройство опережения синхронизатора | 1982 |
|
SU1072177A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2011 |
|
RU2457597C1 |
| Устройство для автоматической синхронизации синхронных генераторов | 1978 |
|
SU748658A1 |
Изобретение относится к области электротехники. Цель изобретения ускорение процесса синхронизации и: уменьшение износа участвующего в процессе оборудования. Для этого реализуется закон изменения регулирующего воздействия, обеспечивающий быстрое попадание агрегата в зону допустимых для включения скольжений. При этом зона малых скольжений вклю- :чается ,в зону допустимых для включения скольжений, а возможность зависания ликвидируется. Производится первоначальное регулирукицее воздействие и по его результатам определяется величина последующего регулирующего воздействия, необходимая для изменения скольжения от текущей величины до значений скольжения противоположного знака в зоне допустимых для включения скольжений. 3 ил. о 9 (Л
счет ускорения синхронизации и умень- 20 водят последующее воздействие на решения износа участвующего в процессе оборудования, определяют , в какой зоне скольжений находится агрегат, ив случае его нахождения в зонах.
допустимых для включения малых сколь- 25стимого для включения и находящегося
жений, дополнительно фиксируют отно-вне зоны зависания скольжения просительньй угол сдвига фаз роторовтивоположного знака по отношению к
синхронизируемых агрегатов, скоростьскольжению, зафиксированному после
и направление их относительного дви-окончания переходного процесса.
гг
f.i /. t
-5,
ИМ.
.
пт t пик
. /
(p. Ф
у . ft
/ sr(9i. Фие. 2
гулятор скорости агрегата, величину которого определяют по величинам первоначального воздействия, вызванного им изменения скольжения и допуи
з.г
м. h
nairc
Пдерийоние oai ну -оргам1 омусоаЛ Mefi/.
fiffttj
Л.- Si
nanefietm аоюмотв Кяь fyaatMoe инаумс
, Запрос M/Snepene Jmyot Cvt
Ла
is,oyfie/n
| Авторское свидетельство СССР № 758378, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для уравнивания частот при синхронизации генератора переменного тока | 1980 |
|
SU920960A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ синхронизации возбужденной синхронной машины | 1975 |
|
SU598179A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
