ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет от европейской патентной заявки № 17194901.9, поданной 05/10/2017, раскрытие которой включено посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе стабилизации и усиления команд для управления летательным аппаратом, а также к способу стабилизации и управления летательным аппаратом.
УРОВЕНЬ ТЕХНИКИ
Летательный аппарат содержит, как известно, множество управляемых пилотом органов управления полетом и множество управляемых элементов, которые функционально связаны с органами управления полетом.
В частности, летательный аппарат представляет собой вертолет или самолет с органами непосредственного управления полетом, то есть с органами управления полетом, которые механически или гидравлически связаны непосредственно с управляемыми элементами.
Если летательный аппарат представляет собой самолет, управляемыми элементами являются поверхности управления полетом.
В других случаях вертолеты известных типов содержат, в основном, фюзеляж, несущий винт, расположенный в верхней части фюзеляжа и вращающийся вокруг своей оси, и хвостовой винт, расположенный на конце фюзеляжа.
Более подробно, винт, в свою очередь, в основном содержит втулку, вращающуюся вокруг вышеупомянутой оси и снабженную множеством лопастей, радиально прикрепленных консольным образом к вышеупомянутой втулке, и вал, соединяемый с приводным элементом и функционально соединенный со втулкой, чтобы приводить ее во вращение.
Лопасти вертолета шарнирно прикреплены к втулке при помощи соответствующих механических или упругих шарниров, чтобы они имели возможность свободно поворачиваться вокруг одной или нескольких осей и, таким образом, обеспечивали реализацию различных конфигураций винта.
В частности, лопасти шарнирно прикреплены к втулке, чтобы обеспечивать возможность поворота вокруг соответствующих продольных осей и, таким образом, изменять соответствующие углы установки и возникающую в результате этого подъемную силу.
Другими словами, лопасти определяют элементы, которые должны управляться при помощи органов управления полетом.
Для регулирования углов установки лопастей вертолет содержит:
- множество органов управления полетом, управляемых пилотом для выполнения различных маневров; и
- множество цепей механических соединений, расположенных между органами управления полетом и множеством первых исполнительных устройств, предназначенных для управления соответствующими лопастями.
Более подробно, вертолет содержит, касательно винта:
- первый орган управления полетом, известный как «общий шаг»; и
- второй орган управления полетом, известный как «циклический шаг».
В частности, первый орган управления полетом, известный как общий шаг, позволяет совместно изменять угол установки лопастей, тем самым вызывая увеличение или уменьшение подъёмной силы, создаваемой винтом.
Вместе с тем второй орган управления полетом, известный как циклический шаг, позволяет циклически изменять угол установки лопастей. В результате, во время своего вращения вокруг оси лопасти создают переменную подъёмную силу, вызывая наклон диска винта вперед или назад.
Вместе с тем лопасти хвостового винта управляются при помощи третьего органа управления полетом, который позволяет совместно изменять связанные углы установки этих лопастей и, следовательно, усилие, с которым они воздействуют на вертолет.
Другими словами, эти общие изменения углов установки лопастей позволяют управлять углом рыскания вертолета.
Каждый первый, второй и третий орган управления формируют соответствующий сигнал первого входного воздействия, передаваемый в соответствующее первое исполнительное устройство. В частности, такой сигнал первого входного воздействия по существу пропорционален положению органа управления полетом.
Для каждого управляемого элемента вертолеты, известным образом, также содержат:
- систему стабилизации и управления летательного аппарата, известную как SCAS, которая формирует сигнал второго входного воздействия; и
- сумматор, который формирует выходной сигнал, определяющий управляющее воздействие на соответствующее первое исполнительное устройство и эквивалентный сумме сигналов первого и второго входных воздействий.
Таким образом, для каждого органа управления полетом, сигнал второго входного воздействия, формируемый SCAS, накладывается на сигнал первого входного воздействия с целью стабилизации вертолета с учетом внешних возмущений.
Согласно первому известному решению, SCAS содержит множество первых исполнительных устройств, встроенных в соответствующие соединительные цепи и управляемых при помощи системы управления полетом.
Согласно еще одному известному решению, SCAS содержит для каждого первого исполнительного устройства:
- второе и третье исполнительные устройства, расположенные параллельно и соединенные с первым рычагом;
- второй рычаг, соединенный с органом управления полетом, для передачи сигнала первого входного воздействия; и
- третий рычаг, определяющий сумматор и функционально соединенный с первым и вторым рычагами, а также с первым исполнительным устройством, для передачи выходного сигнала.
В частности, сигнал второго входного воздействия и выходной сигнал, по существу, пропорциональны положению первого рычага и третьего рычага, соответственно.
Кроме того, второе и третье исполнительные устройства каждой SCAS управляются системой управления полетом.
Несмотря на свою эффективность, описанные выше SCAS известного типа могут быть улучшены.
В частности, второе и третье исполнительные устройства, расположенные параллельно, управляются парой взаимно независимых клапанов и могут быть независимо друг от друга перемещены в первое и второе положение, соответственно.
Благодаря такой конфигурации сигнал второго входного воздействия, по существу, определяется суммой первого и второго положения второго и третьего исполнительных устройств.
Так называемый полный диапазон управления связанного первого исполнительного устройства, то есть состояние, при котором соответствующее первое исполнительное устройство может быть перемещено во всей связанной области перемещения, достигается для некоторых значений отклонения первого хода второго исполнительного устройства и второго хода третьего исполнительного устройства.
В случае отказа, который становится причиной неисправности, например, второго исполнительного устройства и, следовательно, по существу нулевого значения для первого хода, отклонение второго хода, описываемое третьим исполнительным устройством, обязательно должно быть в два раза больше номинального отклонения, чтобы обеспечить полный диапазон управления связанного первого исполнительного устройства.
Кроме того, в случае перерегулирования, то есть отказа, который вызывает блокировку в конечном положении хода, например, второго исполнительного устройства, для сохранения полного диапазона управления соответствующим первым исполнительным устройством отклонение второго хода должно быть таким, чтобы компенсировать тот факт, что второе исполнительное устройство не может быть перемещено.
В связи с этим заявитель заметил, что в случае перерегулирования все еще существует риск того, что первый рычаг достигнет положения максимального выдвижения в течение нескольких долей секунды.
Описанная конфигурация SCAS также требует наличия значительного количества первых, вторых и третьих рычагов, которые должны быть размещены в ограниченном пространстве, что создает трудности при производстве и обслуживании.
Кроме того, система управления полетом расположена в удалении относительно SCAS.
Система управления полетом запрограммирована на постоянное сравнение требуемых важных значений переменных, указывающих на положение и ориентацию вертолета, с действующими значениями вышеупомянутых важных переменных, измеренных соответствующими приборами, и запрограммирована на формирование последующего управляющего сигнала для второго и третьего исполнительных устройств. Этот управляющий сигнал определяет второе входное воздействие.
Такое решение является неоптимальным, поскольку требует наличия многочисленных кабелей, проложенных между системой управления полетом и вторым и третьим исполнительными устройствами. Кроме того, неизбежные помехи, возникающие в вертолете, могут повлиять на правильную передачу управляющего сигнала во второе и третье исполнительные устройства.
Наконец, SCAS содержит для каждого первого исполнительного устройства пару ограничителей хода, расположенных в фиксированных положениях, которые ограничивают максимальное значение сигнала второго входного воздействия определенной частью, которая обычно составляет 10% от максимальной величины сигнала первого входного воздействия. Таким образом, положение первого исполнительного устройства определяется, преимущественно, управляющим воздействием, оказанным пилотом на рычаг управления, и, следовательно, первым входным воздействием и, в некоторой степени, управляющим воздействием от второго входного воздействия, определяемого первым и вторым исполнительными устройствами SCAS.
В отрасли существует потребность адаптировать диапазон максимальных колебаний первого сигнала к эффективно контролируемому органу управления полетом, чтобы оптимизировать функционирование вертолета.
В документах EP-B-2947325 и EP-A-2913265 описаны известные типы систем стабилизации и управления летательным аппаратом.
В документе US-A-3561322 раскрыта система стабилизации и усиления команд для управления летательным аппаратом, а также способ стабилизации и управления, согласно ограничительной части п. 1, 21 и 24 формулы изобретения, соответственно.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание системы стабилизации и усиления команд для управления летательным аппаратом, которая позволяет устранить по меньшей мере один из вышеупомянутых недостатков и/или удовлетворить по меньшей мере одну из вышеупомянутых потребностей, связанных с SCAS известного типа, простым и экономичным способом.
Упомянутая выше задача решается при помощи настоящего изобретения, поскольку оно относится к системе стабилизации и управления летательным аппаратом по п. 1 и 23 формулы изобретения.
Наконец, настоящее изобретение относится к способу стабилизации и управления по п. 24 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения предпочтительный вариант осуществления описан ниже исключительно в качестве неограничивающего примера и со ссылкой на прилагаемые чертежи, в которых:
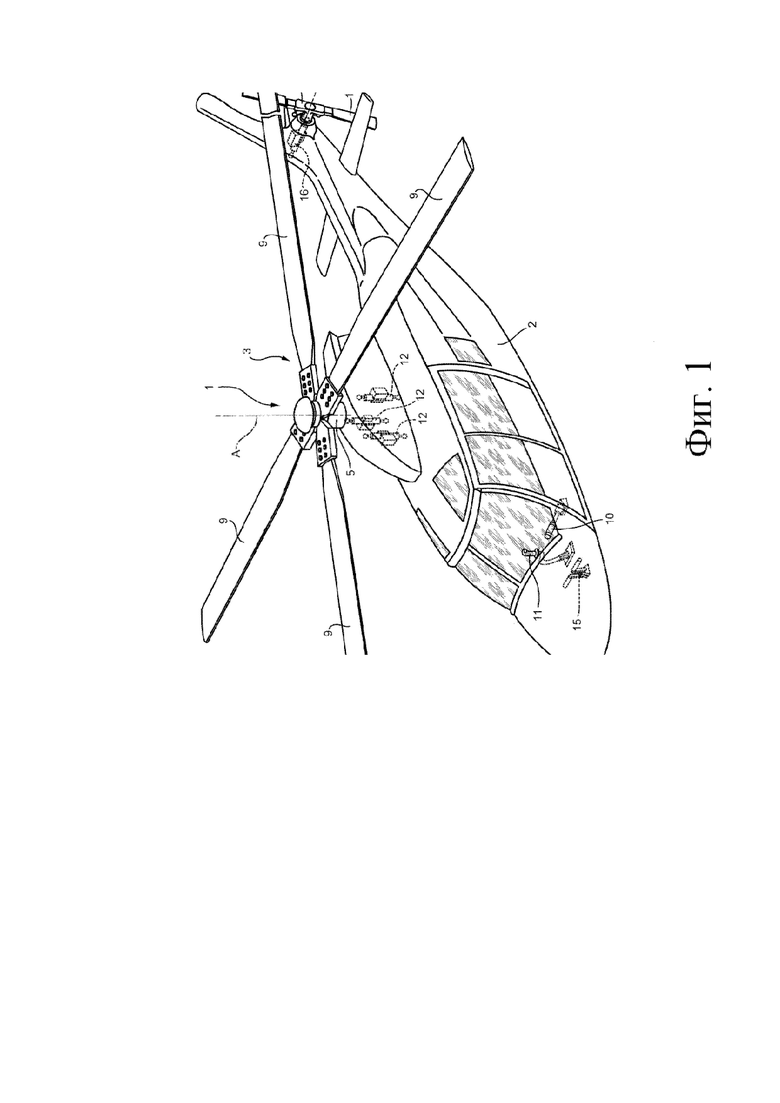
- фиг. 1 представляет собой вид сбоку в перспективе вертолета, содержащего систему стабилизации и усиления команд для управления исполнительным устройством для органа управления полетом, выполненную в соответствии с настоящим изобретением, с некоторыми частями, удаленными для лучшего понимания;
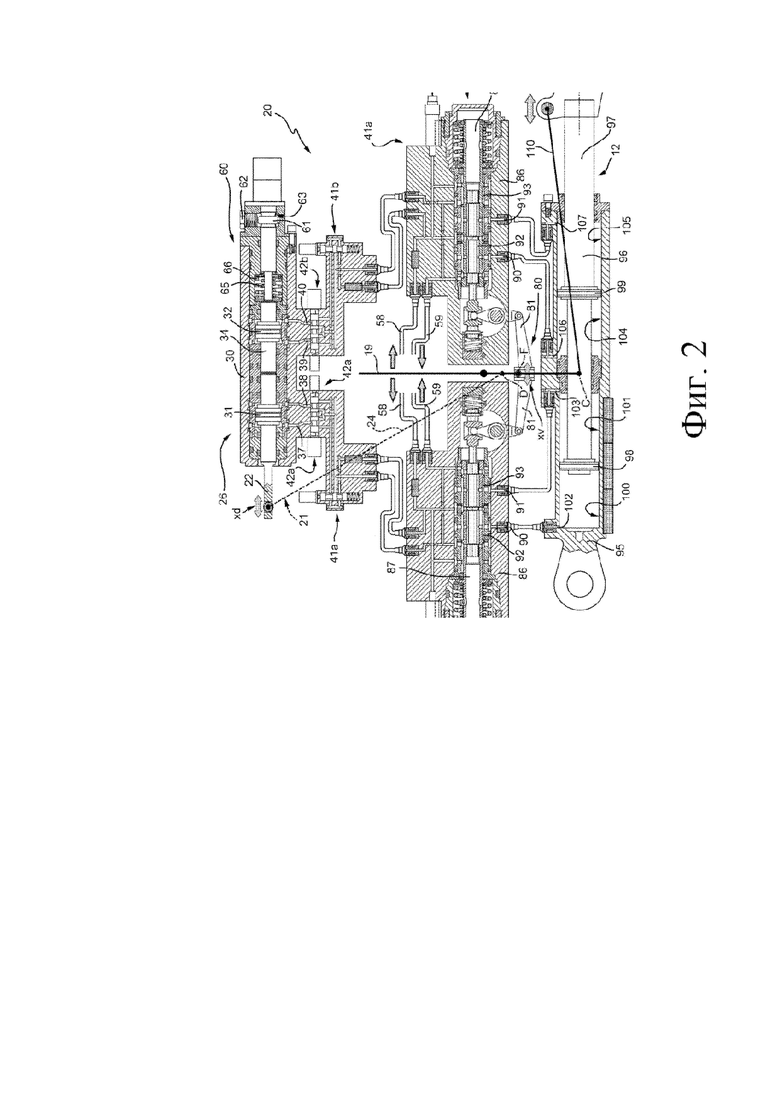
- фиг. 2 представляет собой вид с разрезом некоторых компонентов системы, показанной на фиг. 1; и
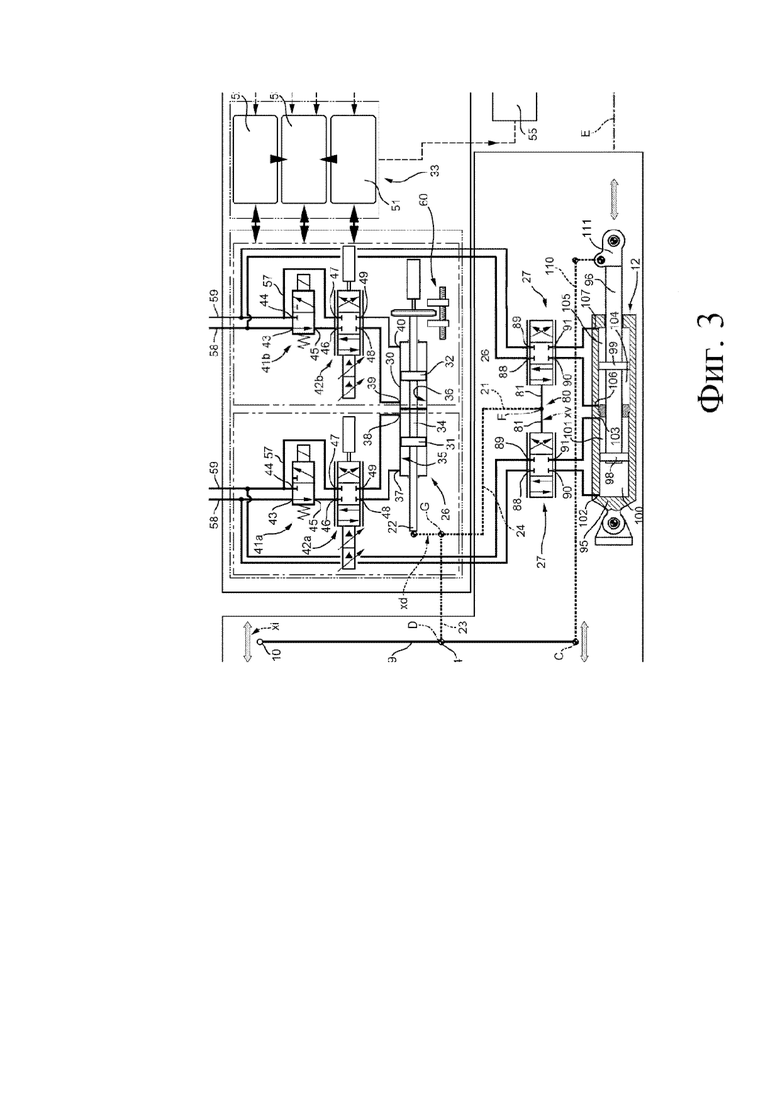
- фиг. 3 представляет собой функциональную схему системы, показанной на фиг. 1 и 2.
НАИЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на фиг. 1, позиция 1 обозначает летательный аппарат, имеющий возможность зависания в воздухе, в частности, вертолет, в своей основе содержащий фюзеляж 2, несущий винт 3, расположенный в верхней части фюзеляжа 2 и вращающийся вокруг оси А, и хвостовой винт 4, расположенный на одном конце фюзеляжа 2 и вращающийся вокруг своей оси, поперечной по отношению к оси А.
Более подробно, несущий винт 3 содержит втулку 5 с осью А, на которой консольно смонтированы и шарнирно закреплены множество лопастей 9, которые продолжаются радиально относительно оси А.
Лопасти 9 шарнирно соединены со втулкой 5, так что их ориентация может быть изменена относительно продольных осей, чтобы регулировать соответствующие углы установки лопастей относительно воздушного потока.
Более конкретно, вертолет 1 содержит:
- приводимый в действие пилотом орган 10 управления полетом, известный как «общий шаг» и выполненный с возможностью совместно изменять углы установки лопастей 9, тем самым вызывая увеличение или уменьшение подъёмной силы, создаваемой вертолетом 1;
- приводимый в действие пилотом орган 11 управления полетом, известный как «циклический шаг» и выполненный с возможностью циклически изменять угол установки лопастей 9 в соответствии с относительными положениями по отношению к оси А; и
- множество исполнительных устройств 12, в показанном случае трех, управляемых органами 11 управления полетом и функционально связанных с лопастями 9 для регулирования соответствующих углов установки в зависимости от органов 10, 11 управления полетом.
Винт 4 содержит втулку 13 с осью B, на которой консольно закреплены при помощи шарниров множество лопастей 14 и которые продолжаются в радиальном направлении относительно оси B.
Лопасти 14 шарнирно закреплены на втулке 13 так, что их ориентация относительно соответствующих продольных осей может изменяться совместно, чтобы регулировать соответствующие углы установки относительно воздушного потока.
Вертолет 1 также содержит:
- приводимый в действие пилотом орган 15 управления полетом для совместного изменения углов установки лопастей 14, благодаря чему контролируется рыскание вертолета 1; и
- исполнительное устройство 16, управляемое органами 15 управления полетом и функционально связанное с лопастями 14 для регулирования соответствующих углов установки в зависимости от органа 15 управления полетом.
Вертолет 1 также содержит, для каждого исполнительного устройства 12, 16 (фиг. 3):
- соответствующий рычаг 19, функционально связанный с одним или несколькими соответствующими органами 10, 11, 15 управления полетом;
- соответствующую систему 20 стабилизации и управления, называемую в дальнейшем SCAS 20; и
- соответствующий рычаг 21 сумматора.
В последующем описании будет сделана ссылка на одно исполнительное устройство 12 и связанную SCAS 20, поскольку все исполнительные устройства 12 и SCAS 20 идентичны.
Более подробно, рычаг 19 занимает положение, заданное соответствующим органом 10, 11, 15 управления полетом, и, таким образом, передает сигнал входного воздействия xd, заданный воздействием, которое оказывает пилот на соответствующий орган 10, 11, 15 управления полетом.
SCAS 20 содержит выходной элемент 22, который передает сигнал входного воздействия xd.
Рычаг 21 сумматора соединен с выходным элементом 22 и с рычагом 19, и выдает выходной сигнал xv, равный сумме сигналов входных воздействий xi и xd.
В частности, рычаг 21 сумматора содержит:
- сегмент 23, соединенный с рычагом 19 в точке G; и
- сегмент 24, соединенный с выходным элементом 22 и сегментом 23.
Как станет ясно из следующего описания, рычаг 21 сумматора управляет положением исполнительного устройства 12 и, следовательно, соответствующего органа 11, 15 управления полетом.
Благодаря такой конфигурации сигнал входного воздействия xd, сформированный SCAS 20, прибавляется к сигналу входного воздействия xi, сформированному пилотом посредством органов 11, 15 управления полетом, формируя выходной сигнал xv, который позволяет стабилизировать вертолет 1 с учетом внешних возмущений.
В показанном случае рычаг 19 шарнирно закреплен на подвижной опоре C, рычаг 21 сумматора прикреплен к рычагу 19 в общей точке D, а выходной элемент 22 может свободно перемещаться.
В частности, SCAS 20 содержит:
- исполнительное устройство 26, выполненное с возможностью управлять положением выходного элемента 22 и, таким образом, задавать сигнал входного воздействия xd; и
- пару регулирующих клапанов 27, управляемых рычагом 21 сумматора и предназначенных для управления положением исполнительного устройства 12 и, следовательно, связанного органа 11, 15 управления полетом.
Преимущественно, исполнительное устройство 26 содержит:
- корпус 30;
- пару поршней 31, 32, которые могут перемещаться вместе как единое целое внутри упомянутого корпуса 30 и функционально соединены с выходным элементом 22; и
- средство 33 управления (показанное на фиг. 3 только схематически), выполненное с возможностью прилагать первое усилие к поршню 31 и второе усилие к поршню 32; первое и второе усилия являются независимыми друг от друга.
Исполнительное устройство 26 также содержит шток 34, скользящий внутри корпуса 30, на котором закреплены поршни 31, 32.
Другими словами, поршни 31, 32 и шток 34 образуют пару подвижных элементов, расположенных последовательно друг относительно друга и, соответственно, подвергающихся воздействию первого усилия и второго усилия.
Шток 34 перемещается как единое целое с выходным элементом 22.
В показанном случае шток 34 и поршни 31, 32 объединены для создания единого выходного элемента 22.
Со ссылкой на фиг. 3, корпус 30 содержит пару камер 35, 36, внутри которых скользят поршни 31, 32, соответственно.
Каждая камера 35, 36 содержит соответствующие отверстия 37, 38; 39, 40, расположенные по разные стороны от соответствующего поршня 31, 32.
Исполнительное устройство 26 также содержит ограничительный блок 60 для ограничения хода штока 34 между двумя конечными положениями. Как следствие, этот ограничительный блок 60 ограничивает диапазон перемещения входного воздействия xd, формируемого SCAS 20.
В показанном случае максимальный диапазон хода входного воздействия xd составляет часть, например, 10% от максимального диапазона хода входного воздействия xi.
Предпочтительно, чтобы ограничительный блок 60 был выполнен с возможностью сделать максимальный диапазон хода входного воздействия xd регулируемым в соответствии с эксплуатационными потребностями исполнительного устройства 12, 16.
Более подробно, ограничительный блок 60 закреплен на исполнительном устройстве 26.
В показанном случае ограничительный блок 60 содержит (фиг.2):
- цилиндр 61 с внутренней резьбой, ось которого расположена перпендикулярно оси штока 34 и через который проходит упомянутый шток 34, выполненный с возможностью люфта внутри разгруженного участка 63 штока 34; и
- резьбовую головку 62, навинченную на цилиндр 61.
Цилиндр 61 допускает смещение штока 34 на величину хода, равную половине разности между длиной разгруженного участка 63 и диаметром цилиндра 61, измеренной параллельно направлению скольжения штока 34.
Когда необходимо отрегулировать максимальный диапазон хода входного воздействия xd, достаточно изменить диаметр цилиндра 61, вставленного в разгруженный участок 63, чтобы можно было регулировать максимальный ход штока 34.
Исполнительное устройство 26 также содержит пару пружин 65, 66, в показанном случае спиральных пружин, соосных со штоком 34 и предназначенных для упругого предварительного нагружения штока 34 в требуемом центрированном положении.
Средство 33 управления содержит, для каждого поршня 31, 32 и связанной камеры 35, 36:
- соответствующий клапан 41a, 41b, который содержит пару впусков 43, 44 и выпуск 45;
- соотвествующий клапан 42a, 42b, который содержит пару впусков 46, 47 и пару выпусков 48, 49;
- линию 58, присоединенную с возможностью переноса текучей среды к внешнему контуру, содержащему масло под давлением, и к впуску 43 соответствующего клапана 41a, 41b; и
- линию 59, присоединенную с возможностью переноса текучей среды к внешнему контуру под давлением выпуска, и к впуску 44 соответствующего клапана 41a, 41b, и содержащую байпас 57, присоединенный с возможностью переноса текучей среды к впуску 47 соответствующего клапана 42a, 42b.
Каждый клапан 41a, 41b является избирательно перемещаемым:
- в соответствующее первое положение (показанное на фиг. 3), в котором он соединяет с возможностью переноса текучей среды впуск 43 и выпуск 45 и обеспечивает сброс давления на впуске 44; и
- в соответствующее второе положение, в котором он обеспечивает сброс давления на впуске 43 и соединяет с возможностью переноса текучей среды впуск 44 с выпуском 45.
Каждый клапан 42a, 42b является избирательно перемещаемым:
- в соответствующее первое положение, в котором он соединяет с возможностью переноса текучей среды впуски 46, 47 с выпусками 48, 49, соответственно, и, следовательно, с отверстиями 37, 38; или
- в соответствующее второе положение, в котором он соединяет с возможностью переноса текучей среды впуски 46, 47 с выпусками 49, 48, соответственно, и, следовательно, с отверстиями 37, 38; или
- в соответствующее третье положение (показанное на фиг. 3), в котором впуски 46, 47 и выпуски 49, 48 соединяются с возможностью переноса текучей среды с линией сброса.
Средство 33 управления также содержит:
- блок 51 управления (схематически показан на фиг.3), запрограммированный для управления клапанами 41a, 41b; 42а, 42b, которые связаны с поршнем 31; и
- блок 52 управления (схематически показан на фиг.3), запрограммированный для управления клапанами 41a, 41b; 42а, 42b, которые связаны с поршнем 32; и
- резервный блок 53 управления для использования в случае отказа одного из блоков 51, 52 управления.
Блоки 51, 52, 53 управления электрически соединены через соответствующие цифровые шины 54 с системой 55 управления полетом вертолета 1.
Более подробно, система 55 управления полетом запрограммирована для задания требуемого значения хода штока 34 в зависимости от измеренных значений некоторых важных характеристик положения и ориентации вертолета 1 и соответствующих требуемых значений для этих характеристик, чтобы стабилизировать вертолет 1.
Система 55 управления полетом также запрограммирована на передачу этого требуемого значения в блоки 51, 52, 53 управления через цифровые шины 54.
Блоки 51, 52, 53 управления запрограммированы на:
- расчет, в зависимости от такого требуемого значения, уместных правил управления для клапанов 41a, 41b; 42a, 42b; и
- передачу сигнала обратной связи в систему 55 управления полетом.
Таким образом, средство 33 управления регулирует первое и второе значения усилий, действующих на поршни 31 и 32, соответственно, независимо друг от друга.
Вертолет 1 также содержит рычаг 80 (фиг. 2 и 3), функционально соединенный с рычагом 21 сумматора в его сечении F, скользящий параллельно направлению E и предназначенный для оказания управляющего воздействия на регулирующие клапаны 27.
Более конкретно, рычаг 80 содержит пару плеч 81, расположенных по разные стороны от сечения F.
Со ссылкой на фиг. 3, каждый регулирующий клапан 27 содержит:
- пару впусков 88, 89, соединенных с возможностью переноса текучей среды с выпусками 47, 48 соответствующего клапана 42a, 42b; и
- пару выпусков 90, 91.
Каждый регулирующий клапан 27 может перемещаться при помощи соответствующего плеча рычага 80 между:
- первым нейтральным положением (показано на фиг. 3), в котором на впусках 88, 89 давление сброшено;
- вторым положением, в котором впуски 88, 89 соединены с возможностью переноса текучей среды с выпусками 90, 91, соответственно; и
- третьим положением, в котором впуски 88, 89 соединены с возможностью переноса текучей среды с выпусками 91, 90, соответственно.
Более конкретно, регулирующие клапаны 27, обычно находящиеся в соответствующих первых нейтральных положениях, перемещаются соответствующими плечами 81 рычага 80 в соответствующие вторые положения или третьи положения после задействования рычага 19 управления, и возвращаются в соответствующие первые положения как только исполнительное устройство 12 достигло требуемого положения.
Со ссылкой на фиг. 2, каждый регулирующий клапан 27 содержит:
- корпус 86, ограничивающий впуски 88, 89 и выпуски 90, 91; и
- поршень 87, скользящий внутри корпуса 86 с сохранением герметичности и соединенный с соответствующим плечом 81 рычага 80.
Корпус 86 и поршень 87 каждого регулирующего клапана 27, в свою очередь, ограничивают:
- камеру 92, в которую обращены связанные впуск 88 и выпуск 90; и
- камеру 93, в которую обращены связанные впуск 89 и выпуск 91.
Исполнительное устройство 12 содержит:
- корпус 95; и
- поршень 96, в свою очередь содержащий шток 97 и пару выступов 98, 99, выступающих из штока 97 и скользящих внутри корпуса 95 с сохранением герметичности.
Корпус 95 и выступ 98 ограничивают пару камер 100, 101, расположенных по разные стороны от выступа 98 и оснащенных соответствующими впусками 102, 103, которые соединены с возможностью переноса текучей среды с соответствующими выпусками 90, 91 одного из регулирующих клапанов 27.
Корпус 95 и выступ 99 ограничивают пару камер 104, 105, расположенных по разные стороны от выступа 99 и оснащенных соответствующими впусками 106, 107, которые соединены с возможностью переноса текучей среды с соответствующими выпусками 90, 91 другого регулирующего клапана 27.
Таким образом, регулирующие клапаны 27 управляют положением штока 97 исполнительного устройства 12 в зависимости от положения рычага 80 и, следовательно, рычага 21 сумматора.
Наконец, шток 97 содержит рычаг 110 обратной связи, соединенный с соответствующим рычагом 19.
Более подробно, рычаг 110 обратной связи присоединен с осевым концом 111 штока 97, который расположен снаружи корпуса 95.
Рычаг 110 обратной связи также соединен с рычагом 19 на опоре C, чтобы после смещения штока 97 смещение рычага 21 сумматора и точки D происходило так, чтобы рычаг 80 возвращался в соответствующее нейтральное положение.
Функционирование вертолета 1 описано со ссылкой только на исполнительное устройство 12, только на соответствующий рычаг 19, рычаг 21 сумматора и выходный элемент 22, и только соответствующую SCAS 20.
Кроме того, функционирование вертолета 1 описано, начиная с конфигурации, показанной на фиг.2, где рычаг 80 удерживает регулирующие клапаны 27 в соответствующих первых нейтральных положениях. В такой конфигурации поршень 96 и, следовательно, лопасти 9, 14 расположены в первом рабочем положении.
Более подробно, пилот воздействует на орган 10, 11, 15, управления полетом, вызывая поворот рычага 19 вокруг опоры C на угол, связанный с командой, подаваемой пилотом, и формируя сигнал входного воздействия xi.
Система 55 управления полетом формирует требуемое значение смещения для выходного элемента 22 и штока 34 (например, вправо, как показано на фиг.2 и 3) и соответствующий сигнал второго входного воздействия xd. Эти требуемые значения смещения и сигналы входных воздействий определяются в зависимости от сравнения измеренных значений некоторых важных характеристик положения и ориентации вертолета 1 и соответствующих требуемых значений для этих характеристик.
Эти требуемые значения смещения передаются системой 55 управления полетом в блоки 51, 52 управления SCAS 20 посредством соответствующих цифровых шин 54.
Блоки 51, 52 управления SCAS 20 управляют клапанами 41a, 41b; 42a, 42b, которые, соответственно, связаны с поршнями 31, 32 исполнительного устройства 26, тем самым вызывая перемещение штока 34 и выходного элемента 22.
Более конкретно, масло под давлением, циркулирующее в линии 58, задает первое и второе усилие на соответствующих поршнях 31, 32, устанавливая шток 34 в положение, связанное с сигналом второго входного воздействия xd.
Важно подчеркнуть, что поршни 31, 32, расположенные последовательно с механической точки зрения, идентичны, так же как и смещения поршней 31, 32 и штока 34.
Ограничительный блок 60 ограничивает ход штока 34 между двумя крайними положениями, ограничивая диапазон хода сигнала входного воздействия xd до уместной доли сигнала входного воздействия xi.
Важно подчеркнуть, что диапазон хода сигнала входного воздействия xd и, следовательно, расстояние между вышеупомянутыми двумя крайними положениями, регулируется в соответствии с эксплуатационными потребностями исполнительного устройства 12.
Рычаг 21 сумматора смещается на расстояние, равное сумме перемещений рычага 19 и выходного элемента 22, и в результате выдает выходной сигнал xv, равный сумме сигналов входных воздействий xi и xd.
Таким образом, команда, подаваемая пилотом через органы 10, 11, 15 управления полетом, добавляется к сигналу входного воздействия xd, формируемого SCAS 20, чтобы стабилизировать поведение вертолета 1 с учетом внешних возмущений.
Выходной сигнал xv передается рычагом 21 сумматора в исполнительное устройство 12 через рычаг 80 и регулирующие клапаны 27.
Более конкретно, смещение рычагов 21 сумматора вызывает смещение плеч 81 рычага 80 параллельно направлению E, например, вправо, как показано на фиг.2 и 3.
Это смещение заставляет каждый регулирующий клапан 27 перемещаться из соответствующего первого нейтрального положения в соответствующее второе положение или третье положение.
Более конкретно, смещение плеч 81 вызывает смещение поршней 87 регулирующих клапанов 27, изменяя, тем самым, давление внутри камер 101 исполнительного устройства 12 и, следовательно, перемещая поршень 96, соединенный с лопастями 9, 14, из первого рабочего положения во второе рабочее положение.
Рычаг 110 обратной связи смещается вместе со штоком 97 поршня 96 и вызывает смещение опоры C и, следовательно, точки D и сечения F, рычагов 21 сумматора и плеч 81, чтобы снова вернуть регулирующие клапаны 27 в соответствующее первое нейтральное положение и удерживать исполнительное устройство 12 во втором рабочем положении.
Из ознакомления с SCAS 20 и способом по настоящему изобретению, становятся очевидными преимущества, которые могут быть получены.
В частности, SCAS 20 содержит пару поршней 31, 32, которые могут перемещаться вместе как единое целое внутри корпуса 30 и функционально соединены с подвижным элементом 22, и средство 33 управления, выполненное с возможностью прилагать первое и второе, не зависящие друг от друга, усилия к поршням 31, 32.
Другими словами, поршни 31, 32 расположены последовательно с механической точки зрения и имеют один и тот же ход смещения.
Благодаря этому возможно обеспечение полного диапазона управления исполнительного устройства 12, 16 даже за счет воздействия только на поршни 31, 32.
Более подробно, в случае выхода из строя одного из клапанов 42a, 42b, а значит, и существенной невозможности перемещения соответствующего связанного с ним поршня 31, 32, достаточно, чтобы средства 33 управления вмешалось, изолировав неисправный клапан путем срабатывания соответствующего клапана 41а, 41b, а затем обеспечивает управление все еще активным клапаном 42а, 42b для перемещения штока 34, а значит, и исполнительного устройства 12, 16 в любое положение.
Другими словами, чтобы поддерживать полный диапазон управления исполнительного устройства 12 в случае выхода из строя одного из клапанов 42a, 42b, нет необходимости увеличивать ход поршня 31, 32, управляемый другим клапаном из пары 42a, 42b.
Таким образом, с особым вниманием к состоянию перерегулирования одного из поршней 31, 32, уменьшается риск того, что не может быть обеспечен полный диапазон управления исполнительных устройств 12, даже если это длится несколько долей секунды.
Благодаря тому, что поршни 31, 32 с механической точки зрения расположены последовательно, а не параллельно, можно уменьшить количество рычагов в составе SCAS 20, упростив процесс ее производства и технического обслуживания. Это является особым преимуществом, если учесть тот факт, что пространство, доступное для этих рычагов, весьма ограничено.
Кроме того, в SCAS 20 предусмотрены блоки 51, 52 управления, которые запрограммированы на:
- задание уместных правил управления для клапанов 41a, 41b; 42a, 42b; и
- передачу сигнала обратной связи в систему 55 управления полетом.
Таким образом, можно уменьшить объем кабельных соединений между системой 55 управления полетом и SCAS 20 и уменьшить риск того, что неизбежные помехи, создаваемые в вертолете 1, могут повлиять на правильную передачу сигналов касательно решений известных типов, упомянутых во вступительной части этого описания.
Вертолет 1 также содержит множество ограничительных устройств 60, которые позволяют регулировать максимальный диапазон хода второго входного воздействия xd в соответствии с рабочими характеристиками соответствующих исполнительных устройств 12, с целью оптимизировать функционирование вертолета 1.
Наконец, очевидно, что в отношении SCAS 20 могут быть сделаны модификации и варианты, без отклонения от объема защиты, определенного в формуле изобретения.
Аналогично, вертолет 1 может быть самолетом с органами 10, 11, 15 непосредственного управления полетом, то есть напрямую связанными с поверхностями полета механическим или гидравлическим способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВОЙ КОМПРЕССОР С РАСШИРЕННЫМ ДИАПАЗОНОМ РЕГУЛИРОВАНИЯ | 2017 |
|
RU2703046C1 |
| СТРУКТУРА КАНАЛА ДЛЯ ВСАСЫВАНИЯ ВОЗДУХА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2014 |
|
RU2632314C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2553526C2 |
| ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2010 |
|
RU2560548C2 |
| ПЫЛЕСОС (ВАРИАНТЫ) | 2006 |
|
RU2319435C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2724937C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО ДЛЯ АВТОМОБИЛЯ | 1995 |
|
RU2135853C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2009 |
|
RU2499548C2 |
| МНОГОВИНТОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2693616C2 |
| КАРТЕР ДЛЯ ДВИГАТЕЛЯ ИЛИ КОМПРЕССОРА | 2016 |
|
RU2664606C1 |
Группа изобретений относится к системе стабилизации и управления летательного аппарата (варианты), способу стабилизации и управления летательного аппарата, летательному аппарату (варианты). Система по первому варианту содержит корпус, два элемента, сумматор, два поршня, средство управления, регулируемое ограничивающее устройство, резьбовую головку. Способ включает этапы для взаимодействия вышеперечисленных элементов системы. Система по второму варианту в отличие от первого дополнительно содержит второй блок управления и резервный блок управления. Каждый из вариантов летательного аппарата содержит систему управления полетом, не менее одного: органа управления, управляемого элемента, исполнительного устройства, систему повышения устойчивости и управления по соответствующему варианту. Обеспечивается повышение устойчивости и усиление команд для управления летательным аппаратом. 5 н. и 23 з.п. ф-лы, 3 ил.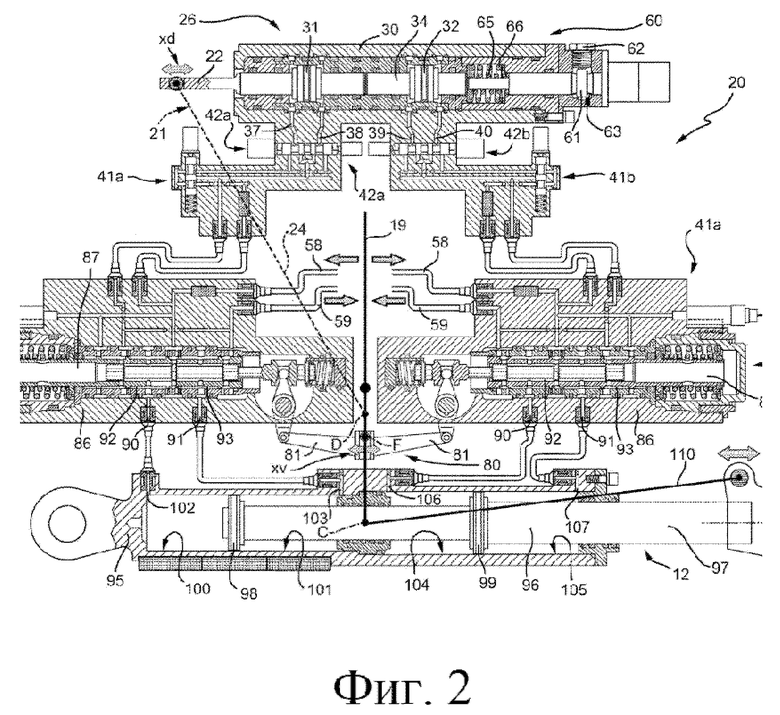
1. Система (20) стабилизации и управления летательного аппарата (1), содержащая
- первый элемент (19), способный перемещаться устройством (10, 11, 15) для входного воздействия пилота в первое положение, определяющее первое входное воздействие (xi);
- второй элемент (22), способный перемещаться во второе положение, которое связано со вторым входным воздействием (xd); и
- сумматор (21), выполненный с возможностью суммирования упомянутых первого и второго входных воздействий (xi, xd) и подачи выходного сигнала (xv), определяющего команду для управляемого элемента (9, 14) упомянутого летательного аппарата (1);
- корпус (30);
- первый и второй поршни (31, 32), которые могут перемещаться вместе как единое целое внутри упомянутого корпуса (30) и функционально соединены с упомянутым вторым элементом(22); и
- средство (33) управления, выполненное с возможностью прилагать первое усилие к упомянутому первому поршню и второе усилие к упомянутому второму поршню (31, 32);
упомянутое второе усилие при использовании является независимым от упомянутого первого усилия;
упомянутое средство (33) управления дополнительно содержит:
- первый клапан (42a), выполненный с возможностью прилагать упомянутое первое усилие к упомянутому первому поршню (31); и
- по меньшей мере второй клапан (42b), выполненный с возможностью прилагать упомянутое второе усилие к упомянутому второму поршню (32);
упомянутый корпус (30), ограничивающий первую камеру (35) и вторую камеру (36), внутри которых упомянутые первый и второй поршни (31, 32) соответственно скользят с сохранением герметичности;
упомянутый первый клапан (42a), который имеет возможность избирательного управления для создания первой величины дифференциального давления в первых участках упомянутой первой камеры (35), воздействующего на соответствующие противоположные поверхности упомянутого первого поршня (31);
упомянутый второй клапан (42b), который имеет возможность избирательного управления для создания второй величины дифференциального давления во вторых участках упомянутой второй камеры (36), воздействующего на соответствующие противоположные поверхности упомянутого второго поршня (32);
упомянутая система (20) дополнительно содержит шток (34), скользящий внутри упомянутого корпуса (30), на котором закреплены упомянутые первый и второй поршни (31, 32) и который может перемещаться как единое целое с упомянутым вторым элементом (22);
отличающаяся тем, что содержит регулируемое ограничивающее устройство (60) для перемещения упомянутого второго элемента (22) между первым и вторым крайними положениями;
по меньшей мере одно крайнее положение из упомянутых первого и второго крайних положений может избирательно регулироваться;
упомянутое регулируемое ограничивающее устройство (60) содержит:
- цилиндр (61) с внутренней резьбой, ось которого расположена перпендикулярно оси упомянутого штока (34) и через который проходит упомянутый шток (34), выполненный с возможностью люфта внутри разгруженного участка (63) упомянутого штока (34); и
- резьбовую головку (62), навинченную на упомянутый цилиндр (61).
2. Система по п.1, отличающаяся тем, что упомянутое средство (33) управления предусматривает возможность электронного подключения к системе (55) управления полетом для получения команды, связанной с сигналом от упомянутого второго входного воздействия (xi), и запрограммировано на перемещение упомянутого второго элемента (22) на основе упомянутой команды.
3. Система по п.2, отличающаяся тем, что она содержит цифровую шину (54), выполненную с возможностью передавать упомянутую команду в упомянутое средство (33) управления.
4. Система по п.2 или 3, отличающаяся тем, что упомянутое средство (33) управления содержит первый блок (51) управления, запрограммированный для управления упомянутым первым клапаном (42a), и второй блок (52) управления, запрограммированный для управления упомянутым вторым клапаном (42b).
5. Система по п.4, отличающаяся тем, что упомянутое средство (33) управления содержит третий резервный блок (53) управления.
6. Система по п.5, отличающаяся тем, что упомянутое ограничивающее устройство (60) расположено на упомянутом корпусе (30).
7. Система по любому из предшествующих пунктов, отличающаяся тем, что содержит исполнительное устройство (26), выполненное с возможностью управлять положением упомянутого второго элемента (22) и задавать упомянутое второе входное воздействие (xd);
упомянутое исполнительное устройство (26) содержит упомянутый корпус (30), упомянутые первый и второй поршни (31, 32) и упомянутое средство (33) управления.
8. Система по п.7, в случае зависимости от любого из пп. 5-7, отличающаяся тем, что упомянутое средство (33) управления содержит:
- упомянутый первый клапан (42a) и упомянутый второй клапан (42b);
- упомянутый первый блок (51) управления, который запрограммирован для управления упомянутым первым клапаном (42a), связанным с упомянутым первым поршнем (51);
- упомянутый второй блок (52) управления, который запрограммирован для управления упомянутым вторым клапаном (42b), связанным с упомянутым вторым поршнем (52); и
- упомянутый резервный блок (53) управления, который подлежит использованию в случае отказа одного из упомянутых первого блока (51) управления и второго блока (52) управления.
9. Система по п.8, отличающаяся тем, что содержит:
- третий и четвертый клапаны (41a, 41b), каждый из которых содержит пару из соответствующих первого и второго впусков (43, 44) и соответствующий выпуск (45);
- первую линию (58), присоединенную с возможностью переноса текучей среды к внешнему контуру, содержащему рабочую жидкость под давлением, и к упомянутым соответствующим первому и второму впускам (43, 44);
- вторую линию (59), присоединенную с возможностью переноса текучей среды ко второму внешнему контуру под давлением выпуска и к упомянутым соответствующим первому и второму впускам (43, 44) упомянутых соответствующих третьего и четвертого клапанов (41a, 41b) и содержащую байпас (57), присоединенный с возможностью переноса текучей среды к дополнительному впуску (47) соответствующих первого и второго клапанов (42a, 42b).
10. Система по п.9, отличающаяся тем, что и третий, и четвертый клапаны (41a, 41b) являются избирательно перемещаемыми:
- в соответствующее первое положение, в котором они присоединяются с возможностью переноса текучей среды к соответствующему упомянутому первому впуску (43) и упомянутому соответствующему выпуску (45) и обеспечивают сброс давления в упомянутом втором впуске (44); и
- в соответствующее второе положение, в котором они обеспечивают сброс давления в соответствующем упомянутом первом впуске (43) и присоединение с возможностью переноса текучей среды к упомянутому соответствующему выпуску (45) и упомянутому второму впуску (44).
11. Система по п.10, отличающаяся тем, что упомянутый первый блок (51) управления запрограммирован на управление упомянутым третьим клапаном (41a), связанным с упомянутым первым поршнем (31), и что упомянутый второй блок (52) управления запрограммирован на управление упомянутым четвертым клапаном (41b), связанным с упомянутым вторым поршнем (32).
12. Летательный аппарат, содержащий:
- по меньшей мере один орган (10, 11, 15) управления полетом, приводимый в действие пилотом;
- по меньшей мере один управляемый элемент (9, 14);
- по меньшей мере одно исполнительное устройство (12, 16), функционально соединенное с упомянутым управляемым элементом (9, 14) и упомянутым по меньшей мере одним органом (10, 11, 15) управления полетом;
- систему (55) управления полетом и
- по меньшей мере одну систему (20) стабилизации и управления летательного аппарата согласно любому из предшествующих пунктов.
13. Летательный аппарат по п.12, отличающийся тем, что упомянутое средство (33) управления предусматривает возможность электронного подключения к системе (55) управления полетом для получения команды, связанной с сигналом от упомянутого второго входного воздействия (xd), и запрограммировано на перемещение упомянутого второго элемента (22) на основе упомянутой команды.
14. Летательный аппарат по п.13, в случае зависимости от любого из пп. 3-13, отличающийся тем, что упомянутые первый, второй и резервный блоки (51, 52, 53) управления имеют электрические подключения к соответствующим цифровым шинам (54).
15. Летательный аппарат по п.14, отличающийся тем, что упомянутая система (55) управления выполнена с возможностью задавать требуемую величину перемещения упомянутого штока (34), основанную на измеренных значениях определенных важных характеристик положения и высоты упомянутого летательного аппарата (1), и соответствующие желательные значения для упомянутых характеристик с целью стабилизации упомянутого летательного аппарата (1).
16. Летательный аппарат по любому из пп. 13-15, отличающийся тем, что упомянутые первый и второй блоки (51, 52) управления запрограммированы для:
- задания уместных правил управления для упомянутых первого и второго клапанов (42a, 42b) и для упомянутых третьего и четвертого клапанов (42a, 42b) и
- передачи сигнала обратной связи в упомянутую систему (55) управления полетом.
17. Способ стабилизации и управления летательного аппарата (1), содержащий этапы:
i) манипулирования органом (10, 11, 15) управления полетом для перемещения первого элемента (2) в первое положение, задающее первое входное воздействие (xi);
ii) перемещения второго элемента (22) во второе положение, связанное со вторым входным воздействием (xd); и
iii) сложения упомянутых первого и второго входных воздействий для формирования выходного воздействия (xv), определяющего команду для управляемого элемента (9, 14) упомянутого летательного аппарата (1);
iv) перемещения, при помощи средства (33) управления, первого и второго поршней (31, 32), функционально связанных с упомянутым вторым элементом(22) внутри корпуса (30);
v) приложения первого усилия к упомянутому первому поршню (31) и второго усилия к упомянутому второму поршню (32); при этом упомянутое второе усилие является независимым от упомянутого первого усилия;
vi) приложения упомянутого первого усилия к упомянутому первому поршню (31) при помощи первого клапана (42a) и
vii) приложения упомянутого второго усилия к упомянутому второму поршню (32) при помощи второго клапана (42b);
упомянутый корпус (30) ограничивает первую камеру (35) и вторую камеру (36), внутри которых упомянутые первый и второй поршни (31, 32) соответственно скользят с сохранением герметичности;
упомянутый способ дополнительно содержит этапы:
viii) избирательного управления упомянутым первым клапаном (42a) для создания первой величины дифференциального давления в первых участках упомянутой первой камеры (35), воздействующего на соответствующие противоположные поверхности упомянутого первого поршня (31);
ix) избирательного управления упомянутым вторым клапаном (42b) для создания второй величины дифференциального давления во вторых участках упомянутой второй камеры (36), воздействующего на соответствующие противоположные стороны упомянутого второго поршня (32);
упомянутая система (20) дополнительно содержит шток (34), скользящий внутри упомянутого корпуса (30), на котором закреплены упомянутые первый и второй поршни (31, 32) и который может перемещаться как единое целое с упомянутым вторым элементом (22);
упомянутый способ дополнительно содержит этапы:
x) ограничения перемещения упомянутого второго элемента (22) между первым и вторым крайними положениями;
отличающийся тем, что содержит дополнительные этапы:
xi) избирательного регулирования по меньшей мере одного из упомянутых первого и второго крайних положений;
упомянутое регулируемое ограничивающее устройство (60) содержит:
- цилиндр (61) с внутренней резьбой, ось которого расположена перпендикулярно оси упомянутого штока (34) и через который проходит упомянутый шток (34), выполненный с возможностью люфта внутри разгруженного участка (63) упомянутого штока (34); и
- резьбовую головку (62), навинченную на упомянутый цилиндр (61).
18. Способ по п.17, отличающийся тем, что содержит этапы:
xii) электронного соединения упомянутого средства (33) управления с системой (55) управления полетом для получения команды, связанной с упомянутым вторым входным сигналом (xi); и
xiii) перемещения упомянутого второго элемента (22) на основе упомянутой команды.
19. Система (20) стабилизации и управления летательного аппарата (1), содержащая:
- первый элемент (19), способный перемещаться устройством (10, 11, 15) для входного воздействия пилота в первое положение, определяющее первое входное воздействие (xi);
- второй элемент (22), способный перемещаться во второе положение, которое связано со вторым входным воздействием (xd); и
- сумматор (21), выполненный с возможностью суммирования упомянутых первого и второго входных воздействий (xi, xd) и подачи выходного сигнала (xv), определяющего команду для управляемого элемента (9, 14) упомянутого летательного аппарата (1);
- исполнительное устройство (26), выполненное с возможностью управлять положением упомянутого второго элемента (22) и задавать упомянутое второе входное воздействие (xd);
- корпус (30);
- первый и второй поршни (31, 32), которые могут перемещаться вместе как единое целое внутри упомянутого корпуса (30) и функционально соединены с упомянутым вторым элементом (22);
- средство (33) управления, выполненное с возможностью прилагать первое усилие к упомянутому первому поршню и второе усилие к упомянутому второму поршню (31, 32);
- первый клапан (42a), выполненный с возможностью прилагать упомянутое первое усилие к упомянутому первому поршню (31); и
- по меньшей мере второй клапан (42b), выполненный с возможностью прилагать упомянутое второе усилие к упомянутому второму поршню (32);
отличающаяся тем, что упомянутое средство (33) управления содержит первый блок (51) управления, запрограммированный для управления упомянутым первым клапаном (42a), и второй блок (52) управления, запрограммированный для управления упомянутым вторым клапаном (42b);
упомянутое исполнительное устройство (26), содержащее упомянутый корпус (30), упомянутые первый и второй поршни (31, 32) и упомянутое средство (33) управления;
упомянутое средство (33) управления содержит:
- упомянутый первый клапан (42a) и упомянутый второй клапан (42b);
- упомянутый первый блок (51) управления, который запрограммирован для управления упомянутым первым клапаном (42a), связанным с упомянутым первым поршнем (51);
- упомянутый второй блок (52) управления, который запрограммирован для управления упомянутым вторым клапаном (42b), связанным с упомянутым вторым поршнем (52); и
- резервный блок (53) управления, подлежащий использованию в случае отказа одного из упомянутых первого блока (51) управления и второго блока (52) управления;
упомянутое средство (33) управления предусматривает возможность электронного подключения к системе (55) управления полетом для получения команды, связанной с сигналом от упомянутого второго входного воздействия (xi), и запрограммировано на перемещение упомянутого второго элемента (22) на основе упомянутой команды.
20. Система по п.19, отличающаяся тем, что она содержит цифровую шину (54), предназначенную для передачи упомянутой команды в упомянутое средство (33) управления.
21. Система по п.20, отличающаяся тем, что содержит:
- третий и четвертый клапаны (41a, 41b), каждый из которых содержит пару из соответствующих первого и второго впусков (43, 44) и соответствующий выпуск (45);
- первую линию (58), присоединенную с возможностью переноса текучей среды к внешнему контуру, содержащему рабочую жидкость под давлением, и к упомянутым соответствующим первому и второму впускам (43, 44);
- вторую линию (59), присоединенную с возможностью переноса текучей среды ко второму внешнему контуру под давлением выпуска и к упомянутым соответствующим первому и второму впускам (43, 44) упомянутых соответствующих третьего и четвертого клапанов (41a, 41b) и содержащую байпас (57), присоединенный с возможностью переноса текучей среды к дополнительному впуску (47) соответствующих первого и второго клапанов (42a, 42b).
22. Система по п.21, отличающаяся тем, что и третий, и четвертый клапаны (41a, 41b) являются избирательно перемещаемыми:
- в соответствующее первое положение, в котором они присоединяются с возможностью переноса текучей среды к соответствующему упомянутому первому впуску (43) и упомянутому соответствующему выпуску (45) и обеспечивают сброс давления в упомянутом втором впуске (44); и
- в соответствующее второе положение, в котором они обеспечивают сброс давления в соответствующем упомянутом первом впуске (43) и присоединение с возможностью переноса текучей среды к упомянутому соответствующему выпуску (45) и упомянутому второму впуску (44).
23. Система по п.22, отличающаяся тем, что упомянутый первый блок (51) управления запрограммирован на управление упомянутым третьим клапаном (41a), связанным с упомянутым первым поршнем (31), и что упомянутый второй блок (52) управления запрограммирован на управление упомянутым четвертым клапаном (41b), связанным с упомянутым вторым поршнем (32).
24. Летательный аппарат, содержащий:
- по меньшей мере один орган (10, 11, 15) управления полетом, приводимый в действие пилотом;
- по меньшей мере один управляемый элемент (9, 14);
- по меньшей мере одно исполнительное устройство (12, 16), функционально соединенное с упомянутым управляемым элементом (9, 14) и упомянутым по меньшей мере одним органом (10, 11, 15) управления полетом;
- систему (55) управления полетом и
- по меньшей мере одну систему (20) стабилизации и управления летательного аппарата согласно любому из пп.19-23.
25. Летательный аппарат по п.24, отличающийся тем, что упомянутое средство (33) управления предусматривает возможность электронного подключения к системе (55) управления полетом для получения команды, связанной с сигналом от упомянутого второго входного воздействия (xd), и запрограммировано на перемещение упомянутого второго элемента (22) на основе упомянутой команды.
26. Летательный аппарат по п.25, отличающийся тем, что упомянутые первый, второй и резервный блоки (51, 52, 53) управления имеют электрические подключения к соответствующим цифровым шинам (54) упомянутой системы (55) управления полетом.
27. Летательный аппарат по п.26, отличающийся тем, что упомянутый корпус (30) ограничивает первую камеру (35) и вторую камеру (36), внутри которых упомянутые первый и второй поршни (31, 32) соответственно скользят с сохранением герметичности;
упомянутый первый клапан (42a), который имеет возможность избирательного управления для создания первой величины дифференциального давления в первых участках упомянутой первой камеры (35), воздействующего на соответствующие противоположные поверхности упомянутого первого поршня (31);
упомянутый второй клапан (42b), который имеет возможность избирательного управления для создания второй величины дифференциального давления во вторых участках упомянутой второй камеры (36), воздействующего на соответствующие противоположные поверхности упомянутого второго поршня (32);
упомянутая система содержит шток (34), скользящий внутри упомянутого корпуса (30), на котором закреплены упомянутые первый и второй поршни (31, 32) и который может перемещаться как единое целое с упомянутым вторым элементом (22);
упомянутая система (55) управления полетом выполнена с возможностью задавать требуемую величину перемещения упомянутого штока (34), основанную на измеренных значениях определенных важных характеристик положения и высоты упомянутого летательного аппарата (1), и соответствующие желательные значения для упомянутых характеристик с целью стабилизации упомянутого летательного аппарата (1).
28. Летательный аппарат по любому из пп.26 или 27, отличающийся тем, что упомянутые первый и второй блоки (51, 52) управления запрограммированы для:
- задания уместных правил управления для упомянутых первого и второго клапанов (42a, 42b) и для упомянутых третьего и четвертого клапанов (42a, 42b) и
- передачи сигнала обратной связи в упомянутую систему (55) управления полетом.
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| US 3561322 A1, 09.02.1971 | |||
| US 3295420 A1, 03.01.1967 | |||
| US 3482486 A1, 09.12.1969 | |||
| Установка для розлива жидкости отмеренными дозами | 1985 |
|
SU1306908A1 |

