Область техники, к которой относится изобретение
Данное изобретение относится к многовинтовому летательному аппарату, соответствующему ограничительной части п.1 формулы изобретения.
УРОВЕНЬ ТЕХНИКИ
Многовинтовые летательные аппараты известны с давних пор. А недавно они стали очень популярными, поскольку разработаны системы управления для наиболее распространенного среди этих летательных аппаратов - квадрокоптера (четырехвинтового вертолета). Как известно, в квадрокоптере используются четыре электрических двигателя, электропитание на которые подается от батареи. Управление электрическими двигателями является очень точным, и поэтому известные квадрокоптеры демонстрируют весьма устойчивый полет. Они широко применяются как фотографические платформы, несущие съемочную камеру, или находят другое применение, в котором желательна устойчивая летающая платформа.
Такой квадрокоптер известен из документа WO 2014/108459 A1, где речь идет об энергетической эффективности и использовании электрических двигателей.
В еще одном документе - US 4456430 - речь идет о винтовых летательных аппаратах в целом, а соответствующее техническое решение направлено на обеспечение авторотации винтов по причинам безопасности. В этом документе рассматриваются винты изменяемого шага, что - вообще говоря - не является концепцией для квадрокоптеров.
Сущность изобретения
В известном квадрокоптере в качестве источника питания используется батарея. К сожалению, это источник питания имеет ограниченный ресурс, и даже при надлежащем функционировании обычный квадрокоптер может иметь типичную продолжительность полета 15-20 минут. Если емкость батареи увеличивается, полезная нагрузка летательного аппарата уменьшается. Для использования во время спортивных событий желательно значительное увеличение продолжительности полета.
Вместе с тем, желательно также несение большей полезной нагрузки, чем в случае известных квадрокоптеров. Например, при фотографировании на расстоянии, в частности - в условиях низкой освещенности, представляет интерес применение съемочных камер большего размера. Увеличенные полезные нагрузки желательны также при рассмотрении других приложений, которые соответствуют рассматриваемой концепции и характеризуются потребностью в несении более тяжелой аппаратуры. Таким образом, желательно разработать квадрокоптер, который обеспечит значительно возросшую продолжительность полета, а также сможет при этом нести возросшую полезную нагрузку. В общем случае, это можно было бы реализовать путем увеличения мощности двигателей, присущей электрическим двигателям, и увеличения емкости батареи. Уже предприняты несколько попыток внедрения преимуществ двигателей внутреннего сгорания в четырехвинтовые конструкции путем простого размещения одного двигателя внутреннего сгорания в каждом винте. Доказана безуспешность этих попыток: из-за того, что сектор газа двигателя внутреннего сгорания обычно малоподвижен и нечувствителен, квадрокоптеру для надлежащего функционирования нужно очень точное управления выражаемыми в оборотах в минуту скоростями вращения винтов.
По меньшей мере одна из проблем известного уровня техники решается с помощью данного изобретения, представляющего собой многовинтовой летательный аппарат, содержащий по меньшей мере первый, второй и третий винты, каждый из которых выполнен с возможностью вращения посредством предназначенных для этого первого, второго и третьего гидравлического двигателей, по меньшей мере одну силовую установку, по меньшей мере первый, второй и третий гидравлический насосы, предназначенные для соответствующих первого, второго и третьего гидравлического двигателей, причем каждый гидравлический насос выполнен с возможностью подачи текучей среды под давлением в каждый гидравлический двигатель для подвода мощности к гидравлическому двигателю и тем самым вращения соответствующих винтов, блок управления, предназначенный для управления работой многовинтового летательного аппарата, при этом возможность управления многовинтовым летательным аппаратом обеспечивается путем изменения потока текучей среды под давлением, распределяемой в каждый соответствующий гидравлический двигатель, при этом поток текучей среды под давлением, подаваемой в каждый гидравлический двигатель, является индивидуально управляемым посредством по меньшей мере одного клапана управления, конфигурация которого обеспечивает управление потоком текучей среды под давлением из каждого гидравлического насоса в предназначенный для него гидравлический двигатель.
Преимущество вышеупомянутого многовинтового летательного аппарата заключается в том, что возможно достижение чрезвычайно надежно функционирующего многовинтового летательного аппарата. А также в том, что стравливание давления приводит к генерированию тепла в количестве, существенно меньшем, чем ограничение давления. Таким образом можно уменьшить габариты охладителя текучей среды и можно уменьшить объем текучей среды. Кроме того, охладитель текучей среды можно объединить с расширительным бачком гидравлического контура. Вышеупомянутый летательный аппарат чрезвычайно прост в сооружении, и для этого можно использовать стандартные компоненты с минимальными модификациями. А вследствие того, что электрические двигатели не используются, можно увеличить продолжительность полета.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, он дополнительно содержит приемопередающий блок для приема команд дистанционного управления многовинтовым летательным аппаратом.
Преимущество этого заключается в том, что многовинтовой летательный аппарат может представлять собой беспилотный летательный аппарат (БЛА). Таким образом, можно управлять БЛА с некоторого расстояния, и поэтому он способен входить в области, которые могут быть опасными для пилотируемого летательного аппарата.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, в упомянутой, по меньшей мере, одной силовой установке используется горючее топливо.
Преимущество этого заключается в том, что горючее топливо обладает большей плотностью энергии чем альтернативные источники энергии, используемые в современном многовинтовом летательном аппарате, такие, как батареи.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, топливо подается в силовую установку из источника топлива, который входит в состав многовинтового летательного аппарата.
Преимущество этого заключается в том, что многовинтовой летательный аппарат можно эксплуатировать без физического соединения с землей.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, топливо, используемое силовой установкой, подается из внешнего источника топлива, причем этот внешний источник предпочтительно находится на земле, а топливо подается по топливопроводу путем накачивания с земли.
Преимущество этого заключается в том, что можно значительно увеличить продолжительность полета, а также можно увеличить полезную нагрузку, поскольку внутренний источник топлива не нужен вообще или нужен очень маленький. Кроме того, если внешний источник топлива находится на земле, не нужны сложные летательные аппараты-заправщики.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, упомянутая, по меньшей мере, одна силовая установка представляет собой газовую турбину.
Преимущество использования газовой турбины заключается в том, что они весьма надежны. Еще одно преимущество заключается в возможности использования целого ряда топлив. Газовая турбина имеет очень высокое отношение тяги к массе, малые вибрации, малую массу и обладает способностью работать на тяжелом топливе.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, он дополнительно снабжен по меньшей мере одним гироагрегатом, связанным с блоком управления, причем блок управления выполнен с возможностью независимого устойчивого ручного управления многовинтовым летательным аппаратом посредством входной мощности, получаемой от упомянутого по меньшей мере одного гироагрегата.
Преимущество этого заключается в том, что управление многовинтовым летательным аппаратом значительно упрощается. А кроме того, управлять многовинтовым летательным аппаратом сможет менее квалифицированный человек, не прошедший специальное обучение.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, каждый гидравлический насос имеет магистраль подачи в каждый предназначенный для него гидравлический двигатель, и при этом управление потоком текучей среды в каждый гидравлический двигатель осуществляется за счет управления посредством предназначенного для него клапана управления в каждой магистрали подачи, при этом клапаны управления связаны с блоком управления, а каждый клапан управления выполнен с возможностью отвода потока текучей среды из соответствующей магистрали подачи.
Преимущество этого заключается в том, что управление оказывается исключительно простым, потому что независимое управление каждым из клапанов можно осуществлять точно и четко. Это также благоприятно в контексте вырабатываемого тепла - по сравнению с другими режимами управления.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, многовинтовой летательный аппарат имеет четыре винта, а подвод мощности к каждому винту и управление им согласно любому из вышеизложенных пунктов формулы изобретения происходит в соответствии с любым из описанных винтов.
Преимущество этого заключается в том, что обеспечивается очень устойчивая и простая конфигурация многовинтового летательного аппарата.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, каждый гидравлический двигатель и каждый винт расположены на отдельной консоли.
Это имеет преимущество, заключающееся в том, что путем регулирования длины консоли можно достичь разного управления многовинтовым летательным аппаратом, изменяя плечо рычага прижимной силы винтов. Это также имеет преимущество, заключающееся в том, что получается повышенная модульность многовинтового летательного аппарата. Консоли могут быть легко отсоединяемыми. Таким образом, можно разобрать многовинтовой летательный аппарат для транспортировки, снимая консоли вместе с винтами и гидравлическими двигателями. Это также предоставляет больше возможностей упрощенного технического обслуживания, поскольку поврежденную консоль, поврежденный винт и гидравлический двигатель можно легко заменить путем замены гидравлической установки винта консоли.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, винты связаны попарно, так что два или четыре винта имеют одинаковые размер и конфигурацию.
Преимущество этого заключается в том, что можно достичь простого многократного использования компонентов при проектировании многовинтового летательного аппарата.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, направление вращения соответствующего винта делают таким, что оказывается возможным нулевое вращательное движение многовинтового летательного аппарата.
Преимущество этого заключается в том, что отпадает необходимость использования какого-либо винта, который не используется в целях создания подъемной силы. Это является отличием, например, от вертолета.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, ось вращения соответствующего винта и гидравлический двигатель соосны.
Преимущество этого заключается в том, что механическая конструкция многовинтового летательного аппарата очень проста по сравнению с обычным вертолетом, нуждающемся в сложном автомате перекоса, чтобы работать. Преимущество этого также заключается в том, что техническое обслуживание становится проще. Преимущество этого также заключается в том, что используемые винты могут иметь стандартную конфигурацию и не нуждаются ни в каких конкретных преимуществах. А дополнительное преимущество заключается в том, что массу многовинтового летательного аппарата можно сделать меньшей по сравнению с более сложной системой.
В дополнительном варианте осуществления многовинтового летательного аппарата в соответствии с вышеизложенным, по меньшей мере, один из винтов является наклоняемым.
Это оказывается конкретным преимуществом, если желательна увеличенная скорость многовинтового летательного аппарата в конкретном направлении.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, он содержит самоуплотняющийся топливный бак.
Преимущество этого заключается в том, что если топливный бак повреждается внешним объектом, утечка топлива не будет происходить в значительном количестве, а также значительно снизится риск опасности возгорания.
В дополнительном варианте осуществления многовинтового летательного аппарата в соответствии с вышеизложенным, он дополнительно содержит неподвижные крылья для наращивания подъемной силы, когда многовинтовой летательный аппарат движется вперед в газообразной среде.
Преимущество этого заключается в том, что многовинтовой летательный аппарат будет способен работать с весьма повышенной продолжительностью полета, а также с увеличенной дальностью.
При дополнительном усовершенствовании многовинтового летательного аппарата в соответствии с вышеизложенным, все упомянутые по меньшей мере три гидравлических насоса получают одну и ту же входную вращательную мощность.
Преимущество этого заключается в том, что все гидравлические насосы получают от силовой установки входную вращательную мощность, имеющую точно одну и ту же величину. Это делает управление потоком текучей среды в каждый гидравлический двигатель чрезвычайно простым, поскольку выходная мощность потока гидравлической текучей среды из каждого гидравлического насоса всегда будет одним и тем же.
В дополнительном варианте осуществления многовинтового летательного аппарата в соответствии с вышеизложенным, силовая установка передает мощность соответствующему гидравлическому насосу посредством редуктора, предпочтительно таким образом, что каждый гидравлический насос получает одну и ту же входящую вращательную мощность.
Преимущество использования редуктора заключается в том, что выходная вращательная мощность силовой установки можно изменять таким образом, что оно окажется согласованным с желаемой входной вращательной мощностью, получаемой гидравлическими насосами. Это, в свою очередь, приведет к более эффективному многовинтовому летательному аппарату. Редуктор станет средством, которому придется выдерживать избыточную нагрузку.
В соответствии с дополнительным вариантом осуществления многовинтового летательного аппарата согласно вышеизложенному, гидравлические насосы скомпонованы на одном выходном валу силовой установки.
Это исключительно простой способ приложения точно одной и той же входной вращательной мощности к каждому гидравлическому насосу. Это механическое управление синхронизацией гидравлических насосов является, в частности, упрощенным и обеспечивает отказоустойчивое управление синхронизацией гидравлических насосов.
В соответствии с дополнительным вариантом осуществления многовинтового летательного аппарата в соответствии с вышеизложенным, многовинтовой летательный аппарат имеет по меньшей мере, пять винтов, а подвод мощности к каждому винту и управление им происходит так, как в случае любого винтов, описанных выше.
Наличие большего количества винтов обеспечивает более устойчивый полет, и если происходит отказ одного винта или гидравлического двигателя, возможность эксплуатации многовинтового летательного аппарата сохраняется. Не следует считать, что это количество ограничивается пятью: шесть и более винтов дают еще более расширенные возможности управления полетом.
В соответствии с дополнительным вариантом осуществления многовинтового летательного аппарата в соответствии с вышеизложенным, он содержит одну силовую установку, предназначенную для каждого гидравлического насоса, при этом силовые установки синхронизированы блоком управления таким образом, что каждый гидравлический насос получает одну и ту же входную вращательную мощность.
Это альтернативное усовершенствование, которое утяжелит многовинтовой летательный аппарат. За счет использования меньших силовых установок и синхронизации посредством блока управления, возникают дополнительные возможности адаптации, касающиеся подъемной силы и дисбалансов многовинтового летательного аппарата.
В соответствии с дополнительным вариантом осуществления многовинтового летательного аппарата согласно вышеизложенному, при этом винты имеют фиксированный шаг.
Преимущество этого заключается в том, что винт оказывается, в частности, простым. Кроме того, винт может быть весьма экономичным в изготовлении. И этот винт является весьма стойким к внешним воздействиям.
В соответствии с дополнительным вариантом осуществления вышеупомянутого многовинтового летательного аппарата, при его применении винты имеют шаг, который регулируют вручную, когда многовинтовой летательный аппарат не находится в эксплуатации.
Преимущество этого заключается в том, что винты можно регулировать по причинам, в число которых входят рабочие условия. Это могут быть различная влажность воздуха, температура воздуха или высота эксплуатации.
В соответствии с дополнительным вариантом осуществления многовинтового летательного аппарата согласно вышеизложенному, винты в нем имеют шаг, регулируемый в полете.
Преимущество этого заключается в том, что регулирование шага можно провести очень быстро.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
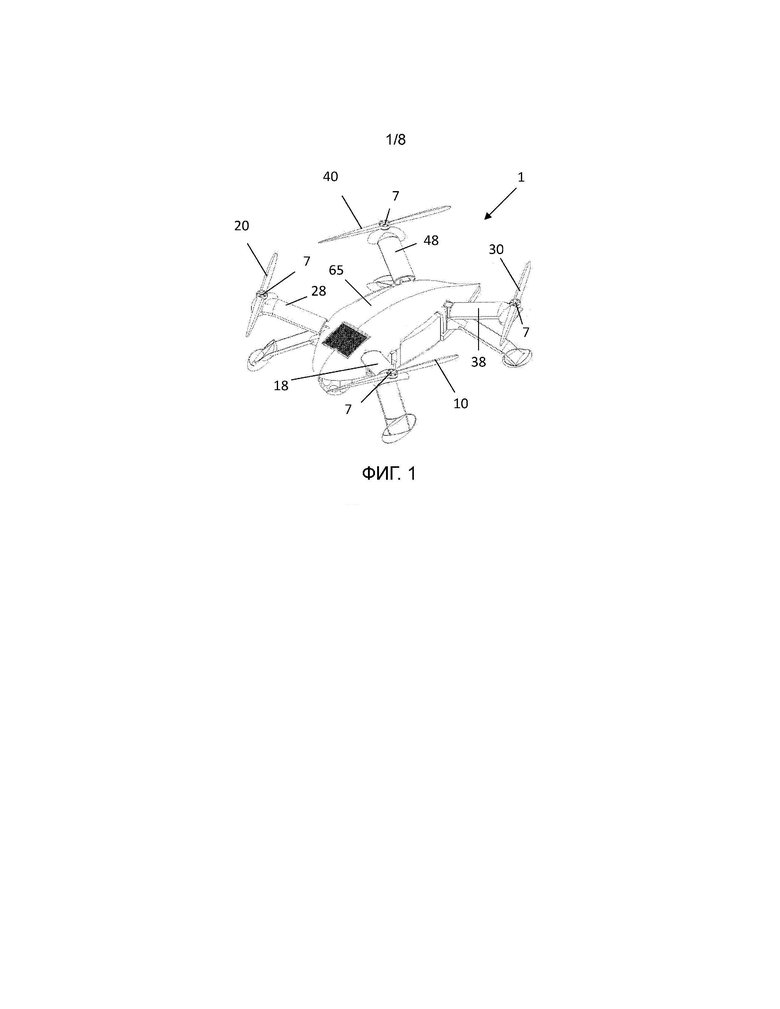
На фиг.1 представлен вариант осуществления многовинтового летательного аппарата в соответствии с изобретением.
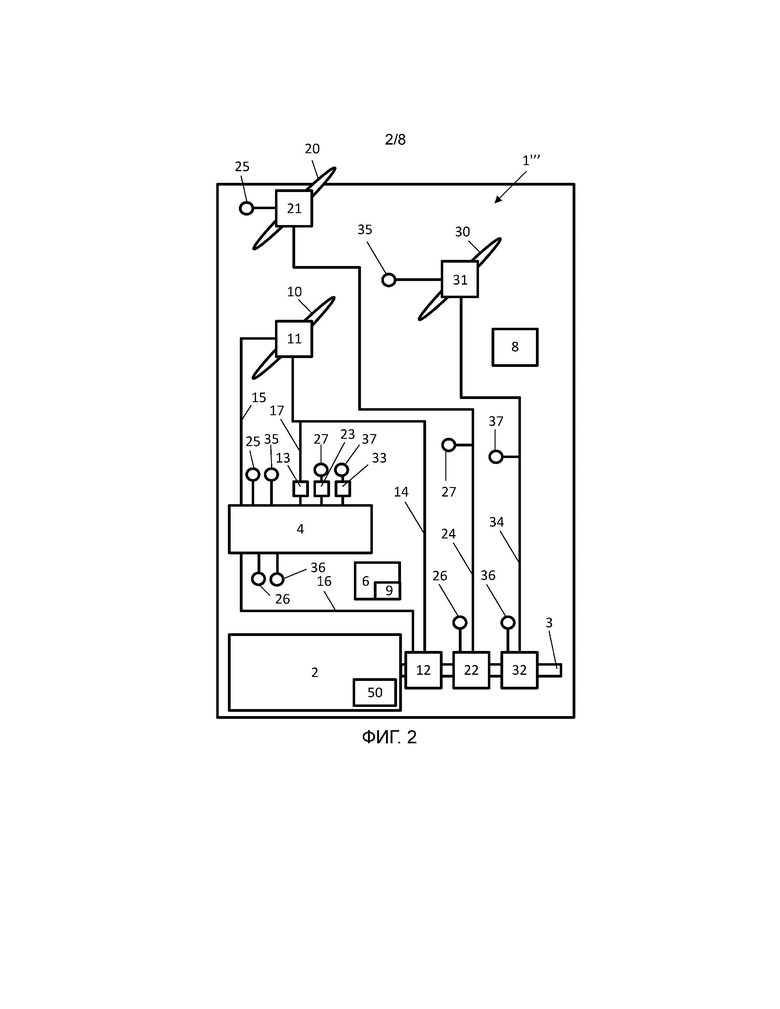
На фиг.2 представлен вариант осуществления многовинтового летательного аппарата в соответствии с изобретением, имеющего три винта.
На фиг.3 представлен вариант осуществления многовинтового летательного аппарата в соответствии с изобретением, имеющего четыре винта.
На фиг.4 подробно представлена конструкция секции многовинтового летательного аппарата в соответствии с изобретением.
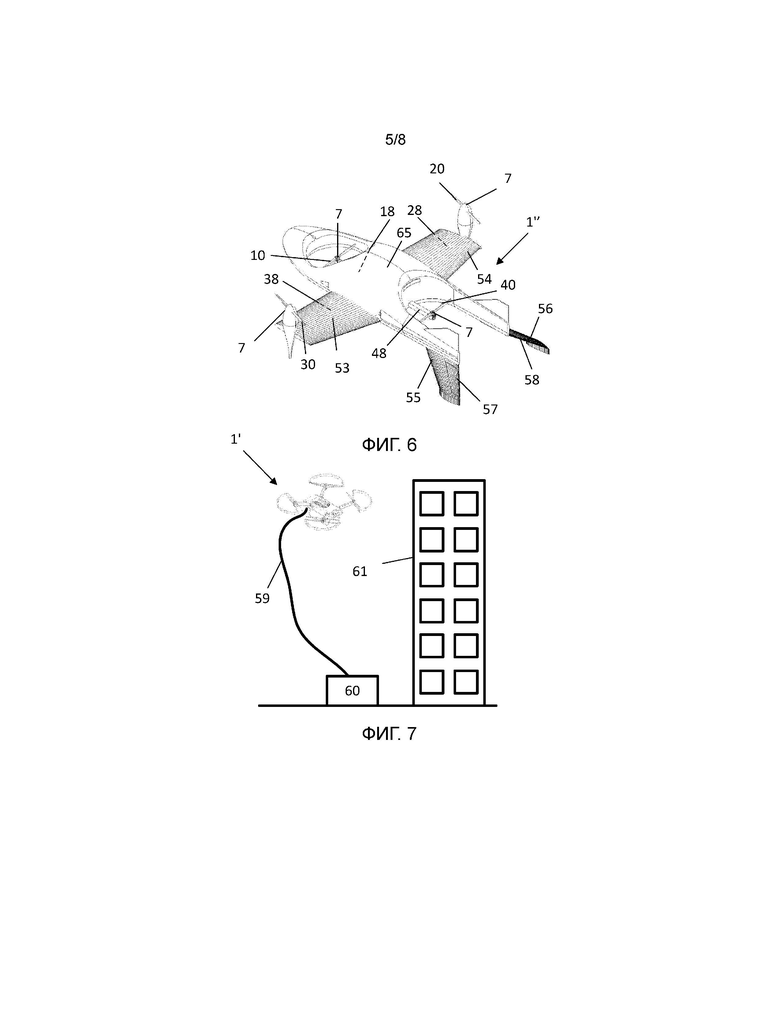
На фиг.5 представлен вариант осуществления данного изобретения в котором внутреннего источника топлива нет или он очень мал.
На фиг.6 представлен вариант осуществления данного изобретения, в котором - в дополнение к винтам - также предусмотрены крылья, чтобы обеспечить подъемную силу при полете вперед.
На фиг.7 вариант осуществления согласно фиг.5 представлен в процессе эксплуатации.
На фиг.8 представлен вариант осуществления многовинтового летательного аппарата в соответствии с изобретением, имеющего редуктор, предусмотренный перед гидравлическими насосами.
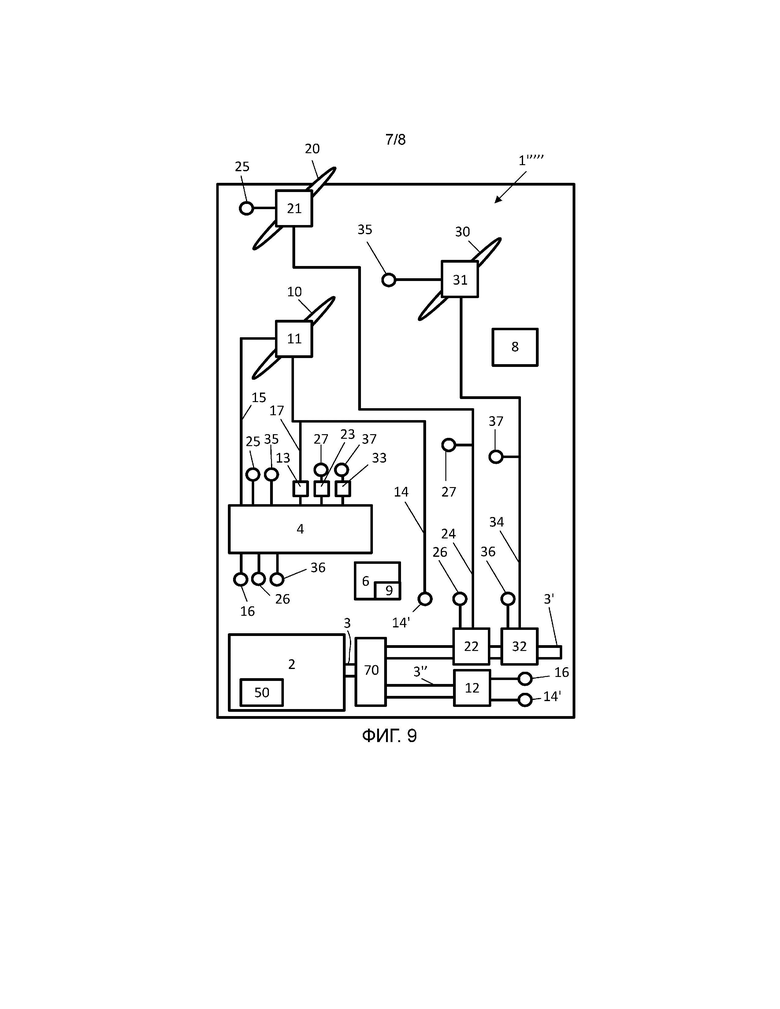
На фиг.9 представлен вариант осуществления многовинтового летательного аппарата в соответствии с изобретением, содержащего редуктор, предусмотренный перед гидравлическими насосами.
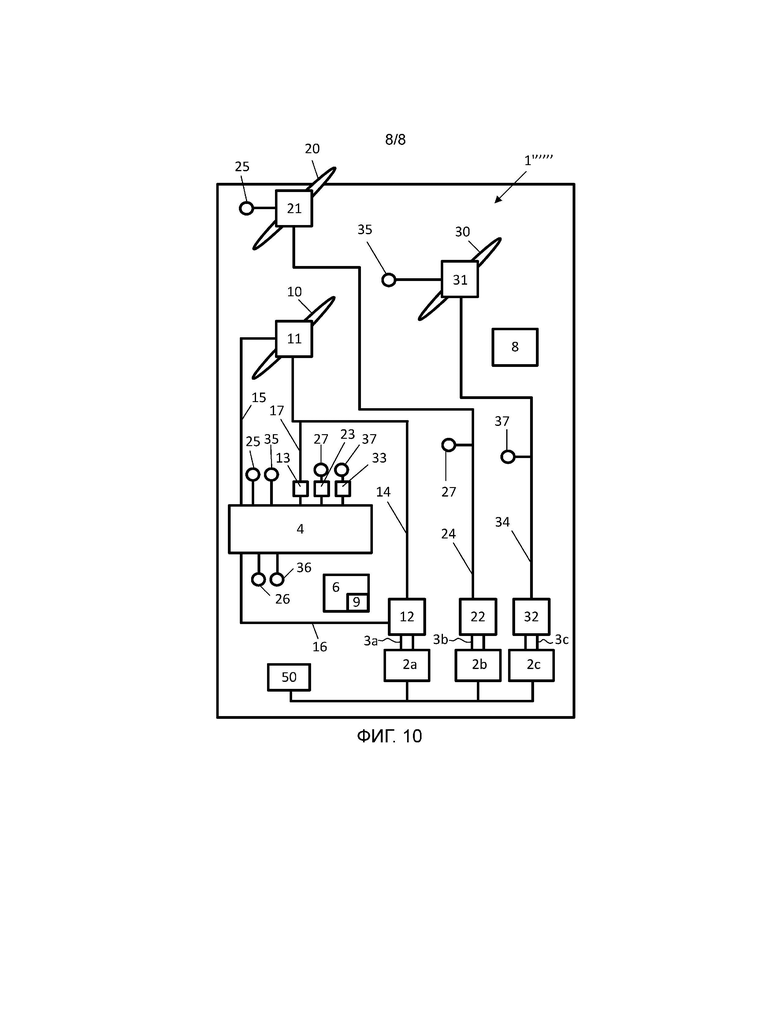
На фиг.10 представлен вариант осуществления многовинтового летательного аппарата в соответствии с изобретением, где каждый гидравлический насос снабжен силовой установкой.
ПОДРОБНОЕ ОПИСАНИЕ
В соответствии с этой заявкой на патент, употребляются следующие определения.
Многовинтовой летательный аппарат: летательный аппарат, который может взлетать и приземляться вертикально, не нуждаясь в специальном винте, предотвращающем вращательное движение. Кроме того, предлагаемый многовинтовой летательный аппарат не содержит тарелку автомата перекоса вертолета на оси винта. Таким образом, винты не должны быть способными изменять плоскость винта относительно оси вращения двигателя, приводящего винт в движение. Это означает, что винты в общем случае сравнимы с пропеллером обычного самолета. Таким образом, в сущности, многовинтовой летательный аппарат в соответствии с данным изобретением должен быть способен висеть, приземляться и взлетать вертикально.
Количество винтов не ограничивается вариантами осуществления, описываемыми ниже. Следует понять, что количество винтов может составлять от трех до любого желаемого количества, а наиболее предпочтительны четыре винта.
Термин «винт» в контексте данного изобретения распространяется на пропеллеры, винты разной конфигурации лопастей, а также крыльчатки типа вентиляторных.
Винт с фиксированным шагом: этот винт не может изменять шаг крыла соответствующего винта, т.е., лопасти винта. Это означает, что невозможно осуществить вращение крыла или лопасти винта вдоль его продольной оси. Для всех нижеследующих вариантов осуществления предпочтительны винты с фиксированным шагом.
Винт со вручную регулируемым шагом: это означает, что крыло винта или лопасть винта можно регулировать вручную на земле, когда многовинтовой летательный аппарат не находится в эксплуатации. В сущности, это означает, что шаг фактически неизменен, когда летательный аппарат готов к эксплуатации, но при этом угол крыла или лопасти соответствующего винта можно регулировать перед эксплуатацией.
Шаг винта, регулируемый в полете: это означает, что шаг крыла или лопасти соответствующего винта можно регулировать в полете путем регулирования угла установки. Даже несмотря на то, что это не предпочтительный способ эксплуатации предлагаемого многовинтового летательного аппарата, этот способ все равно возможен.
Источник топлива: источник топлива в общем случае означает бак для жидкого топлива, однако следует понять, что это может быть газгольдер, мощная батарея или любой другой подходящий источник энергии, такой, как топливный элемент с подходящим веществом, разлагаемым для выработки электроэнергии.
Силовая установка: силовая установка в общем случае представляет собой силовую установку, работающую за счет сгорания горючего. В общем случае она представляет собой газовую турбину, но может быть и двигателем Отто, дизельным двигателем, электрическим двигателем или любым другим подходящим двигателем.
Топливопровод: в общем случае этот термин означает трубу, по которой можно подавать жидкое топливо в силовую установку. Вместе с тем, если силовая установка представляет собой электрический двигатель, топливопровод следует трактовать как электрический кабель.
Блок управления: блок управления в общем случае представляет собой программируемый блок компьютера, также известный под названием «центральный процессор» (ЦП), в состав которого входят процессор, запоминающие схемы и все остальные распространенные конструктивные элементы, связанные с блоком управления в целом. Блок управления присутствует во всех вариантах осуществления.
Во всех нижеследующих вариантах осуществления имеется фюзеляж.
Во всех нижеследующих вариантах осуществления, детали, элементы или другие особенности, являющиеся схожими, обозначены одинаковыми позициями.
На фиг.1 представлен первый вариант осуществления, где описывается многовинтовой летательный аппарат 1 в виде квадрокоптера. Многовинтовой летательный аппарат 1 имеет фюзеляж 65. Подвод мощности к каждому из винтов 10, 20, 30, 40 многовинтового летательного аппарата 1 осуществляется согласно фиг.4. Представлена силовая установка 2. Силовая установка 2 предпочтительно является газовой турбиной, но может быть и любым ротационным двигателем в соответствии с вышеизложенным. Из силовой установки 2 выступает вращающийся вал 3. На этом валу 3 расположен гидравлический насос 12. Насос имеет вращаемый элемент внутри, который приводится в движение посредством вала 3. Из гидравлического насоса 12 магистраль 14 текучей среды подает текучую среду под давлением в гидравлический двигатель 11. Этот гидравлический двигатель 11 имеет ось 7 вращения в виде вала, на котором установлен винт 10. На магистрали 14 текучей среды предусмотрена магистраль 17 стравливания, которая имеет установленный на ней клапан 13 управления. Магистраль 17 стравливания - посредством клапана 13 управления - выполнена с возможностью стравливания потока текучей среды в расширительный бак 4. Клапаном 13 управления управляет блок 6 управления посредством шины 6а управления. Таким образом, путем регулирования клапана 13 управления, можно управлять потоком текучей среды в гидравлический двигатель 11. За счет этого оказывается возможным точное управление скоростью вращения винта 10 и подводимой к нему мощностью. Управление выражаемой количеством оборотов в минуту скоростью вращения винта 10 осуществляет блок 6 управления посредством шины 6с управления. Это также называют гидростатическим приводом многовинтового летательного аппарата, а выражаемой количеством оборотов в минуту скоростью вращения соответствующего винта 10 управляют, стравливая текучую среду, такую, как масло для гидравлических систем, из нагнетающей магистрали 14 в магистраль 16 возврата за счет использования прецизионного клапана 13 управления, которым управляет система управления полетом. Решающее устройство, которое не показано, посредством шины 6с управления выдает информацию о положении лопастей винта, а также о выражаемой количеством оборотов в минуту скорости вращения винта. Преимущество этой компоновки - в противоположность установке регулятора давления на стороне нагнетания - заключается в том, что стравливание давления приводит к генерированию тепла в существенно меньшем количестве, чем ограничение давления. При этом сокращаются потребность в охладителе текучей среды и объем текучей среды, а охладитель текучей среды можно объединить с расширительным бачком 4 гидравлического контура. На фиг.4 представлено функционирование лишь одного винта 10, поскольку все винты идентичны, когда речь заходит о силовой передаче. Каждый винт расположен на одной из отдельных консолей 18, 28, 38, 48. Консоли 18, 28, 38, 48 простираются от фюзеляжа 65. Это имеет преимущество, заключающееся в том, что путем регулирования длины консоли можно достигать разного управления многовинтовым летательным аппаратом - за счет изменения плеча рычага прижимной силы винтов. Это также имеет преимущество, заключающееся в том, что получается «повышенная модульность» многовинтового летательного аппарата. Консоли могут быть легко отсоединяемыми. Таким образом, можно разобрать многовинтовой летательный аппарат для транспортировки, снимая консоли вместе с винтами и гидравлическими двигателями. Это также предоставляет больше возможностей упрощенного технического обслуживания, поскольку поврежденную консоль, поврежденный винт и гидравлический двигатель можно легко заменить путем замены гидроустановки винта консоли. Как можно заметить на фиг.1, оси 7 вращения винтов 10, 20, 30, 40 являются такими же, как оси вращения соответствующих гидравлических двигателей 11, 21, 31, 41. Описанные многовинтовые летательные аппараты, соответствующие фиг.8, 9, 10, могут также, как рассмотренный выше, содержать по четыре вышеупомянутых винта, гидравлических двигателя и гидравлических насоса, и т.д.
В соответствии с фиг.2, описывается многовинтовой летательный аппарат 1''', который имеет три винта 10, 20, 30. А следовательно - и три гидравлических насоса 12, 22, 32 и три гидравлических двигателя 11, 21, 31. Многовинтовой летательный аппарат 1''' также имеет блок 6 управления. Также предусмотрен блок 8 передатчика-излучателя. И имеется источник 50 топлива. Следует понимать, что основные конструктивные элементы согласно фиг.4 присутствуют и в этом варианте осуществления. Все гидравлические двигатели 12, 22, 32 установлены на одном и том же валу 3. Таким образом, все гидравлические двигатели 12, 22, 32 принимают одну и ту же механическую передачу с вала 3. Также представлен охладитель, объединенный с баком 4, для приема возвращаемой текучей среды из двигателя и/или магистралей 17, 27, 37 стравливания, идущим от магистралей 14, 24, 34 подачи. Все гидравлические двигатели 12, 22, 32 имеют идущие от бака 4 магистрали 16, 26, 36 подачи гидравлической текучей среды, что обеспечивает текучую среду для нагнетания давления в соответствующих двигателях 12, 22, 32. От каждого двигателя 11, 21, 31 к объединенным охладителю и емкости 4 возвращается магистраль 15, 25, 35 текучей среды. В предпочтительном варианте, имеется также гироагрегат 9 для занесения информации об управлении в блок 6 управления. В предпочтительном варианте осуществления, гироагрегат 9 заключен внутри блока 6 управления. Гироагрегат 9 также может быть отдельным блоком, расположенным на многовинтовом летательном аппарате 1. Гироагрегат 9 предпочтительно также должен быть способным воспринимать движения и рыскания, и тангажа многовинтового летательного аппарата.
В соответствии с фиг.3, описывается многовинтовой летательный аппарат 1, имеющий четыре винта, таких, как показанные на фиг.1 и фиг.5. Все остальные компоненты являются общими с вариантом осуществления согласно фиг.2 и фиг.4, такими, как силовая установка 2, блок 6 управления, гироагрегат 9, и т.д. Винты 10, 20, 30, 40 этого летательного аппарата вращаются в двух разных направлениях, причем винты 10 и 40 вращаются в одном и том же направлении. И винты 20 и 30 вращаются в одном и том же направлении. Это предотвращает авторотацию многовинтового летательного аппарата 1, когда на каждый винт 10, 20, 30, 40 передается одна и та же отдаваемая мощность. Следует понять, что если применяются одинаковые гидравлические двигатели 11, 21, 31, 41 и все винты 10, 20, 30, 40 одинаковы, то отдаваемая мощность, которая передается, является одной и той же для потока текучей среды под давлением в каждый гидравлический двигатель 11, 21, 31, 41.
В соответствии с фиг.5, представлен вариант осуществления данного изобретения. Применяется такая же конфигурация, как описанная в связи с фиг.3 и фиг.4, или фиг.8, 9 и 10. Многовинтовой летательный аппарат 1' имеет фюзеляж 65. Вместе с тем, имеется и большое отличие. Этот вариант осуществления скомпонован способным иметь источник 60 основного запаса топлива, который не находится на самом многовинтовом летательном аппарате. Вместо него предусмотрен внешний источник топлива. Вместе с тем, в соответствии с фиг.4, многовинтовой летательный аппарат может иметь находящийся на нем меньший источник 50 топлива для буферизации топлива, или - если отсекается внешний источник топлива - малый внутренний источник топлива можно использовать для эксплуатации и посадки в аварийном режиме. Внутренний источник топлива, как правило, дает продолжительность полета 5-15 минут, а в типичном случае продолжительность полета составляет, по существу, 10 минут. Вариант осуществления согласно фиг.5 может предусматривать оснастку для спасательных работ или борьбы с огнем. Один пример эксплуатации можно увидеть на фиг.7. Топливо либо перекачивают по трубе 59, либо - если речь идет об электроэнергии - подают посредством линии энергоснабжения. Положение внешнего источника 60 топлива может находиться на земле. Положение внешнего источника топлива может находиться на другом летательном аппарате, который можно эксплуатировать вместе с многовинтовой летательным аппаратом и осуществлять дозаправку или подзарядку в воздухе. Продолжительность полета согласно этому варианту осуществления велика и, в сущности, не ограничена. Поскольку источник 50 топлива на многовинтовом летательном аппарате может иметь весьма сокращенные размеры и емкость, т.е., значительно меньшую массу, чем в предыдущих вариантах осуществления, полезную нагрузку многовинтового летательного аппарата можно увеличить на соответствующую массу. Для этого варианта осуществления можно также использовать управляемый по проводам блок 8 передатчика-излучателя. При этом команды управления для данного летательного аппарата передаются по проводам. Это представляет собой конкретное преимущество, поскольку провод можно защитить от внешних возмущений, и потому можно повысить уровень безопасности многовинтового летательного аппарата. Одной дополнительной особенностью, которую можно внести в многовинтовой летательный аппарат согласно фиг.5, а с тем же успехом - и в любой из вариантов осуществления согласно фиг. 1, 2, 3 и 6, являются защитные экраны 51. Эти экраны 51 увеличивают массу, но могут быть и конкретным преимуществом при эксплуатации вблизи внешних объектов, таких, как здание 61. На фиг.5 также нарисован устанавливаемый по выбору гидромонитор 52. Гидромонитор 52, в сущности, представляет собой ствол для подачи, например, воды, пены или любой другой огнегасящей жидкости в огонь. В предпочтительном варианте, огнегасящую жидкость не транспортируют на многовинтовом летательном аппарате, а подают по шлангу на многовинтовой летательный аппарат при эксплуатации. Следует понять, что в варианте осуществления согласно фиг.5 вместо упомянутых средств возможно наличие системы подъемника, например - для спасательных операций. А кроме того, в этом варианте осуществления также имеются винты 10, 20, 30, 40 и гидравлические двигатели 11, 21, 31, 41, расположенные на отдельных консолях 18, 28, 38, 48, как можно увидеть на фиг.5. Эта конфигурация дает уже упомянутые преимущества, описанные в связи с вариантом осуществления, соответствующим фиг.1. Как можно увидеть на фиг.5, оси 7 вращения винтов 10, 20, 30, 40 являются такими же, как оси вращения соответствующих гидравлических двигателей 11, 21, 31, 41. Конечно же, подъемник и гидромонитор 52 применимы к любому варианту осуществления.
На фиг.6 представлен третий вариант - 1ʺ - осуществления данного изобретения. Как и в предыдущих вариантах осуществления, применимы все компоненты согласно фиг.1, 2, 3 и 4, или фиг.8, 9 и 10, рассмотренные в связи с этими чертежами. Имеется фюзеляж 65. По сравнению с предыдущими вариантами осуществления, основных отличий два. Многовинтовой летательный аппарат 1 снабжен неподвижными крыльями 53, 54. А также имеются кили 55, 56 и рули 57, 58. Одна дополнительная особенность этого многовинтового летательного аппарата 1ʺ заключается в том, что два винта 20, 30 являются наклоняемыми в двух, по существу, параллельных плоскостях. Общие плоскости, простираются, по существу, от законцовок крыльев и параллельно продольной оси многовинтового летательного аппарата 1ʺ. За счет наклона винтов 20 и 30, многовинтовой летательный аппарат можно превратить, по существу, в движущийся вперед летательный аппарат с крыльями неизменяемой геометрии. Также возможен наклон соответствующих гидравлических двигателей 21 и 31 вместе с винтами 20, 30. Дальность будет значительно увеличена по сравнению с другими вариантами осуществления. Кроме того, расход топлива при эксплуатации в этом режиме значительно сократится. И винт 10, и винт 40 можно, по существу, остановить при использовании крыльев 53, 54, чтобы обеспечить основную подъемную силу летательного аппарата. Когда многовинтовой летательный аппарат 1ʺ переходит в режим висения, оба - носовой винт 10 и кормовой винт 40 - получают все больше и больше мощности посредством своих соответствующий гидравлических двигателей 11 и 41 до тех пор, пока висение не достигается полностью. Это утверждение справедливо для всех вариантов осуществления, в которых управление осуществляется посредством блока 6 управления. И кроме того, в этом варианте осуществления тоже предусматривается наличие винтов 10, 20, 30, 40 и гидравлических двигателей 11, 21, 31, 41, расположенных на отдельных консолях 18, 28, 38, 48, как можно увидеть на фиг.6. Эта конфигурация дает уже упомянутые преимущества, описанные в связи с вариантом осуществления, соответствующим фиг.1, 2, 3 и 4. Вместе с тем, чтобы повысить модульность в этом варианте осуществления, крылья 53, 54 также можно сделать снимаемыми с многовинтового летательного аппарата 1ʺ согласно фиг.6 для расширения возможностей транспортировки. В общем случае, компоновка носового винта 10 и гидравлического двигателя 11 может предусматривать не расположение их на консоли, а - вместо этого - подвешивание в фюзеляже 65 многовинтового летательного аппарата 1ʺ, в частности, если используется автономный фюзеляж 65. Как можно увидеть на фиг.7, оси 7 вращения винтов 10, 20, 30, 40 являются такими же, как оси вращения соответствующих гидравлических двигателей 11, 21, 31, 41.
В соответствии с фиг.8 и 9, во многовинтовом летательном аппарате 1ʺʺ, 1ʺʺ' возможен редуктор 70 между выходным валом силовой установки 2 и гидравлическими насосами 12, 22, 32. Редуктор 70 может изменять выражаемую количеством оборотов в минуту скорость вращения вала силовой установки 2 таким образом, что эта скорость вращения окажется подходящей для эксплуатации гидравлических насосов, 12, 22, 32. Для большинства приложений, выражаемую количеством оборотов в минуту скорость вращения на выходе силовой установки уменьшают посредством редуктора 70. Но, конечно же, если это желательно, осуществимо и увеличение скорости вращения редуктора 70, выражаемой количеством оборотов в единицу времени. За счет использования конкретного редуктора, как видно на фиг.9, насосы 12, 22, 32, могут быть скомпонованы на разных вращающихся валах 3', 3ʺ. Вместе с тем, предпочтительно, чтобы насосы 12, 22, 32 всегда получали одинаковую входную вращательную мощность. Во всех остальных аспектах представления других конструктивных элементов согласно фиг.8 и фиг.9, конструктивные элементы одинаковы. Следует также понять, что количества винтов, гидравлических насосов и гидравлических двигателей, и т.д., можно выбирать равным любому количеству. На фиг.9 приведено представление, измененное в связи с магистралью 14' гидравлической текучей среды под давлением и гидравлической магистралью 16 подачи, причем это сделано лишь для упрощения чертежа. Редуктор 70, конечно же, ко всем описанным вариантам осуществления, показанным на фиг.1-7. В конфигурации согласно фиг.10, применим редуктор для каждой силовой установки 2a, 2b, 2c.
Как описано в связи с фиг.10, многовинтовой летательный аппарат 1ʺʺʺ также может иметь силовую установку 2, предназначенную для каждого гидравлического насоса 12, 22, 32. Как и в предыдущих вариантах осуществления, каждый гидравлический насос 12, 22, 32 получает одну и ту же входную вращательную мощность. Блок управления управляет этой входной вращательной мощностью таким образом, что каждая силовая установка 2a, 2b, 2c синхронизируется с другими силовыми установками 2a, 2b, 2c. Топливный бак 50 представлен как обычный для силовых установок 2a, 2b, 2c. Количество винтов можно выбрать равным любому количеству, как и в ранее описанных вариантах осуществления, сопоставимому с количествами гидравлических двигателей, клапанов, и т.д. Мощность к каждому гидравлическому насосу 12, 22, 32 подводится посредством отдельного вала 3a, 3b, 3c от каждой соответствующей силовой установки 2a, 2b, 2c.
Силовая установка 2 для всех вариантов осуществления предпочтительно представляет собой газовую турбину. Преимущество использования газовой турбины заключается в том, что они весьма надежны. Еще одно преимущество заключается в возможности использования целого ряда топлив. Газовая турбина имеет очень высокое отношение тяги к массе, малые вибрации, малую массу и обладает способностью работать на тяжелом топливе.
Чтобы решить проблему, для решения которой сделано данное изобретение, следует понять, что для вариантов осуществления, предусматривающих использование электрического источника топлива, необходимо обеспечить источник электрической энергии, который имеет высокую удельную мощность. Один способ достижения этого возможен посредством использования топливного элемента или батареи с емкостью, увеличенной по сравнению с существующими в настоящее время батареями. Или можно обеспечить увеличенную емкость посредством подзарядки в воздухе от второго многовинтового летательного аппарата, поскольку многовинтовой летательный аппарат является предпочтительным.
Следует понять, что во всех вариантах осуществления многовинтового летательного аппарата он может быть так называемым беспилотным летательным аппаратом (БЛА) или пилотируемым летательным аппаратом. Если многовинтовой летательный аппарат выполнен способным нести пилота, то, конечно, он должен быть снабжен органами управления эксплуатацией многовинтового летательного аппарата. Следует понять, что управлять многовинтовым летательным аппаратом может и пилот, не присутствующий на борту многовинтового летательного аппарата, а многовинтовой летательный аппарат при этом остается пилотируемым, с пассажирами, техниками, спасателями, и т.д., на борту.
Следует понять, что во всех вариантах осуществления замысел не ограничивается многовинтовыми летательными аппаратами с тремя или четырьмя винтами, и в зависимости от приложения осуществимо использование любого количества винтов, такого, как пять, шесть, семь, восемь, и т.д. Таким образом, это утверждение справедливо для всех описанных вариантов осуществления, включая варианты осуществления согласно фиг.1, 2, 3, 5, 6, 7, 8, 9, 10.
Для всех вариантов осуществления, включая соответствующие фиг.1, 2, 3, 5, 6, 7, 8, 9, 10, определение «гидравлические насосы получают одинаковую входную вращательную мощность» зависит от одинаковости конфигураций этих гидравлических насосов. Например, если для разных винтов используются гидравлические насосы разных размеров, входную вращательную мощность следует адаптировать так, чтобы потоки гидравлической текучей среды на выходе из соответствующих гидравлических насосов оказывались одинаковыми. Но - конечно же - если используют винты разных размеров, наряду с гидравлическими насосами разных размеров, следует всю систему в целом адаптировать так, чтобы каждый винт смог обеспечивать такую же подъемную силу, как все остальные винты. Заявитель полагает, что это находится в рамках обычных знаний специлиста.



Многовинтовой летательный аппарат содержит три винта, вращающихся с помощью трех гидравлических двигателей, силовую установку, три гидравлических насоса, блок управления, клапан управления. Обеспечивается увеличение продолжительности полета и увеличение веса полезной нагрузки. 23 з.п. ф-лы, 10 ил.
1. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ), содержащий:
по меньшей мере первый, второй и третий винты (10, 20, 30), каждый из которых выполнен с возможностью вращения посредством предназначенных для них первого, второго и третьего гидравлических двигателей (11, 21, 31), по меньшей мере одну силовую установку (2), по меньшей мере первый, второй и третий гидравлические насосы (12, 22, 32), предназначенные для соответствующих первого, второго и третьего гидравлических двигателей (11, 21, 31), причем каждый гидравлический насос (12, 22, 32) выполнен с возможностью подачи текучей среды под давлением в каждый гидравлический двигатель (11, 21, 31) для подвода мощности к гидравлическому двигателю (11, 21, 31) и тем самым вращения соответствующего винта (10, 20, 30);
блок (6) управления, предназначенный для управления работой многовинтового летательного аппарата (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ),
при этом возможность управления многовинтовым летательным аппаратом (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) обеспечивается путем изменения потока текучей среды под давлением, распределяемой в каждый соответствующий гидравлический двигатель (11, 21, 31),
отличающийся тем, что
поток текучей среды под давлением, подаваемой в каждый гидравлический двигатель (11, 21, 31), является индивидуально управляемым посредством по меньшей мере одного клапана управления (13, 23, 33), выполненного с возможностью управления потоком текучей среды под давлением из каждого гидравлического насоса (12, 22, 32) в предназначенный для него гидравлический двигатель (11, 21, 31).
2. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по п.1, отличающийся тем, что дополнительно содержит приемопередающий блок (8) для приема команд дистанционного управления многовинтовым летательным аппаратом (1).
3. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что в упомянутой по меньшей мере одной силовой установке (2) используется горючее топливо.
4. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по п.3, отличающийся тем, что топливо подается в силовую установку (2) из источника (50) топлива, который входит в состав многовинтового летательного аппарата (1).
5. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по п.3 или 4, отличающийся тем, что топливо, используемое силовой установкой (2), подается из внешнего источника (60) топлива, причем внешний источник (60) предпочтительно находится на земле, а топливо подается по топливопроводу (59) путем накачивания с земли.
6. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что упомянутая по меньшей мере одна силовая установка (2) представляет собой газовую турбину.
7. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что дополнительно снабжен по меньшей мере одним гироагрегатом (9), связанным с блоком (6) управления, причем блок (6) управления выполнен с возможностью независимого устойчивого управления многовинтовым летательным аппаратом (1) посредством входной мощности, принимаемой из упомянутого по меньшей мере одного гироагрегата (9).
8. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что каждый гидравлический насос (12, 22, 32, 42) имеет магистраль (14, 24, 34, 44) подачи к каждому специально предназначенному гидравлическому двигателю, при этом за счет управления посредством предназначенного для этого клапана (13, 23, 33, 43) управления на каждой магистрали (14, 24, 34, 44) подачи осуществляется управление потоком текучей среды в каждый гидравлический двигатель (11, 21, 31, 41), при этом клапан (13, 23, 33, 43) управления связан с блоком (6) управления и каждый клапан (13, 23, 33, 43) управления выполнен с возможностью перепуска потока текучей среды из соответствующей магистрали (14, 24, 34, 44) подачи.
9. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ') по любому из предыдущих пунктов, отличающийся тем, что многовинтовой летательный аппарат (1) имеет четыре винта (10, 20, 30, 40), а подвод мощности к каждому винту (10, 20, 30, 40) и управление им осуществляется в соответствии с любым из винтов (10, 20, 30, 40), описанных в любом из предыдущих пунктов.
10. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что каждый гидравлический двигатель (11, 21, 31, 41) и каждый винт (10, 20, 30, 40) расположены на отдельной консоли (18, 28, 38, 48).
11. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по п.9 или 10, отличающийся тем, что винты (10, 20, 30, 40) связаны попарно, так что два или четыре винта (10, 20, 30, 40) имеют одинаковые размер и конфигурацию.
12. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что направление вращения соответствующего винта (10, 20, 30, 40) предусмотрено таким, что обеспечивается возможность нулевого вращательного движения многовинтового летательного аппарата (1).
13. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что ось (7) вращения соответствующего винта (10, 20, 30, 40) и гидравлический двигатель (11, 21, 31, 41) соосны.
14. Многовинтовой летательный аппарат (1ʺ) по п.13, отличающийся тем, что по меньшей мере один из винтов (10, 20, 30, 40) является наклоняемым.
15. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что он содержит самоуплотняющийся топливный бак (50).
16. Многовинтовой летательный аппарат (1ʺ) по любому из предыдущих пунктов, отличающийся тем, что он дополнительно содержит неподвижные крылья (53, 54) для наращивания подъемной силы, когда многовинтовой летательный аппарат (1) движется вперед в газообразной среде.
17. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что все упомянутые по меньшей мере три гидравлических насоса (12, 22, 32, 42) получают одну и ту же входную вращательную мощность.
18. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что силовая установка (2) передает мощность соответствующему гидравлическому насосу (12, 22, 32, 42) посредством редуктора (70), предпочтительно таким образом, что каждый гидравлический насос получает одну и ту же входную вращательную мощность.
19. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ) по любому из пп.1-17, отличающийся тем, что гидравлические насосы (12, 22, 32, 42) скомпонованы на одном выходном валу (3) силовой установки (2).
20. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что он имеет по меньшей мере пять винтов (10, 20, 30, 40), а подвод мощности к каждому винту (10, 20, 30, 40) и управление им осуществляется в соответствии с любым из винтов (10, 20, 30, 40), описанных в любом из предыдущих пунктов.
21. Многовинтовой летательный аппарат (1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что он содержит одну силовую установку (2a, 2b, 2c), предназначенную для каждого гидравлического насоса (10, 20, 30, 40), при этом предназначенные силовые установки (2a, 2b, 2c) синхронизированы блоком (6) управления таким образом, что каждый гидравлический насос (12, 22, 32, 42) получает одну и ту же входную вращательную мощность.
22. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из предыдущих пунктов, отличающийся тем, что винты имеют фиксированный шаг.
23. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из пп.1-21, отличающийся тем, что винты (10, 20, 30, 40) имеют шаг, регулируемый вручную, когда многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) не находится в эксплуатации.
24. Многовинтовой летательный аппарат (1, 1', 1ʺ, 1ʺ', 1ʺʺ, 1ʺʺ', 1ʺʺʺ) по любому из пп.1-21 или 23, отличающийся тем, что винты (10, 20, 30, 40) имеют шаг, регулируемый в полете.
| RU 2013111781 A, 27.09.2014 | |||
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2520821C2 |
| US 4173321 A1, 06.11.1979 | |||
| СПОСОБ ОЧИСТКИ МАСЛО- И ЖИРОСОДЕРЖАЩИХ СТОЧНЫХ ВОД | 2001 |
|
RU2228301C2 |
| US 4982914 A1, 08.01.1991. | |||

