Изобретение относится к области вертолетостроения, в частности к оборудованию вертолетов средствами управления общим и циклическим шагом несущего винта вертолета, а именно к системе управления общим и циклическим шагом вертолетов с гидромеханической системой управления (ГМСУ) и трехточечной схемой расположения гидроприводов.
Для создания сил и моментов, необходимых для заданного движения вертолета, используется система управления.
На вертолетах АНСАТ до настоящего времени устанавливается только электронная система управления.
Известна электронная система управления «СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ» (патент РФ №2282562 от 01.12.2004).
Система содержит в каждом канале управления орган управления, кинематически связанный с датчиком его положения, электрически связанный с электронным вычислителем, к которому подключена бортовая информационная система контроля, которая по аналоговому выходу связана с электродистанционными рулевыми приводами. Выходы датчиков параметров полета подключены к электронному вычислителю. Датчик положения органа управления в каждом канале управления и электронный вычислитель по цифровой и аналоговой части выполнены минимум двукратно резервированными с функцией формирования и обработки сигналов одновременно во всех резервированных каналах.
Недостатком электронной системы управления, установленной на вертолетах АНСАТ-У и АНСАТ-К, является недостаточная надежность.
На данном этапе развития техники механические системы управления пока что по своей надежности превосходят электронные системы.
На большинстве существующих вертолетах применяется механическая система управления. Такие системы обладают высокой надежностью, значительным количеством деталей, сложной регулировкой.
Система гидромеханического управления несущим винтом вертолета с трехточечной схемой расположения гидроприводов
Система управления вертолета состоит из четырех основных каналов. Они разделяются на управление общим шагом (управление подъемной силой по вертикальной оси), циклическим шагом несущего винта (продольное и поперечное управление) и путевое управление (поворот относительно вертикальной оси).
В системе управления вертолета АНСАТ выбрана трехточечная схема размещения гидроприводов, хорошо зарекомендовавшая себя на вертолетах АНСАТ-У и АНСАТ-К.
Управление общим шагом летчик осуществляет при помощи рычага, расположенного слева от него. Управление циклическим шагом несущего винта производится с помощью ручки управления, установленной в кабине. Непосредственно лопасти несущего винта меняют свои углы установки при помощи кинематического механизма автомата перекоса.
Циклическое и вертикальное управление связано с автоматом перекоса.
Автомат перекоса - это устройство, позволяющее менять углы установки лопастей несущего винта и соответственно величину и направление равнодействующей аэродинамических сил винта. При помощи автомата перекоса производится общее и циклическое изменение углов установки лопастей на каждом обороте несущего винта. Циклическое изменение углов установки лопастей позволяет производить управление вертолетом в продольном и поперечном направлениях с помощью соответствующего наклона автомата перекоса.
Автоматы перекоса кольцевого типа являются наиболее распространенными. Автомат перекоса располагается под втулкой несущего винта и состоит из двух колец: невращающегося и вращающегося, соединенных между собой подшипником. Невращающееся кольцо с помощью кардана или шарового шарнира присоединяется к втулке, находящейся на валу главного редуктора. Кольца могут наклоняться одновременно в любой оси, лежащей в плоскости, перпендикулярной оси вала несущего винта. К плечам вращающегося кольца шарнирно крепятся тяги, идущие непосредственно к рычагам поворота лопастей. Рычаги поворота лопасти присоединяются через поводки к корпусам осевых шарниров.
Известен автомат перекоса несущего винта вертолета, установленный направляющим стаканом на неподвижном корпусе редуктора симметрично приводному валу несущего винта. (Патент US №6,325,326 опубл. 04.12.2001. Устройство для управления общим и циклическим шагом несущего винта вертолета.)
На направляющем стакане установлен ползун со сферической наружной поверхностью, имеющий возможность перемещения относительно корпуса в осевом направлении. Ползун с нижним кольцом управления удерживается от вращения на неподвижном стакане шлиц-шарниром.
Имеются также два кольцевых элемента, связанные между собой с помощью шарикоподшипников, первый из которых установлен на ползуне с помощью антифрикционных вкладышей и занимает фиксированное азимутальное положение, а второй вращается вокруг первого вместе с приводным валом несущего винта посредством двухзвенного шлиц-шарнира, с закрепленными на нем качающимися рычагами, имеющими возможность отклоняться во всех направлениях относительно ползуна и соединенными с тягами поворота лопастей.
Крепежные и приводные средства системы управления общим и циклическим шагом несущего винта взаимодействуют с первым кольцевым элементом для перемещения рычагов и ползуна вдоль оси симметрии относительно корпуса и для наклона рычагов относительно ползуна (Патент US №6,325,326. Устройство для управления общим и циклическим шагом несущего винта вертолета, опубл. 04.12.2001).
Известен автомат перекоса несущего винта вертолета, изготовлен опытный образец (RU 2261822, опубл. 10.10.2005).
Автомат перекоса несущего винта вертолета содержит направляющий стакан, жестко закрепленный на неподвижном корпусе симметрично приводному валу несущего винта вертолета, ползун со сферической наружной поверхностью, установленный на направляющем стакане посредством антифрикционного вкладыша с возможностью линейного перемещения вдоль оси вращения вала несущего винта, кольцо управления с антифрикционным вкладышем, подвижно установленное на сферической поверхности ползуна и снабженное устройством предотвращения углового перемещения вокруг направляющего стакана в виде двухзвенного шлиц-шарнира. Кольцо управления изготовлено сборным, причем нижняя часть его выполнена в виде консольной системы с ушками на концах консолей для кинематического соединения кольца с системой управления общим и циклическим шагом несущего винта и снабжена верхним и нижним фланцами соответственно большего и меньшего диаметра, которыми она жестко соединена с верхней частью кольца управления, образуя между собой жесткую кольцевую коробчатую конструкцию. На кольце управления с помощью шарикоподшипников установлено наружное кольцо, приводимое во вращение с помощью двухзвенного шлиц-шарнира, связанного с втулкой несущего винта. Наружное кольцо изготовлено сборным, причем наружная часть выполнена в виде рамы с формой равностороннего многоугольника, углы которого шарнирно соединены с тягами поворота лопасти, а внутри рамы жестко закреплена гильза для установки в ней шарикоподшипников. Внутренние элементы рамы наружного кольца выполнены с ∩-образным поперечным сечением, а стороны - с U-образным поперечным сечением. В цилиндрических шарнирах и сферических подшипниках установлены антифрикционные вкладыши из материала, обладающего самосмазывающими свойствами. Консоли расположены под углом 90° друг к другу и шарнирно соединены с бустерами (гидроусилителями) системы управления общим и циклическим шагом несущего винта вертолета.
Управление автоматом перекоса осуществляется тремя гидроусилителями (бустерами), шарнирно соединенными непосредственно с нижним кольцом управления автомата перекоса(непосредственно с невращающейся тарелкой).
Автомат перекоса устанавливается на главном редукторе. На ползуне крепится сферическая опора, служащая для обеспечения наклона тарелки автомата перекоса. Изменение тяги несущего винта одновременно по всем азимутам осуществляется путем перемещения ползуна по направляющей (изменение общего шага).
Нижнее кольцо управления устанавливается на ползуне автомата перекоса через сферическую опору, что дает ему возможность наклоняться в продольном и поперечном направлениях, а также перемещаться вертикально вместе с ползуном. Изменение тяги несущего винта одновременно по всем азимутам осуществляется путем перемещения ползуна вертикально, вдоль оси вала несущего винта (изменение общего шага).
При управлении по каналам «крен» и «тангаж» наклон нижнего кольца управления автомата перекоса производится посредством тех же гидроприводов, при этом ползун может оставаться неподвижным. Каждый из этих гидроприводов, является конечным звеном проводки продольного или поперечного управления.
Люфты в управлении неблагоприятно влияют на управляемость вертолета. Появление чрезмерного суммарного люфта может привести к самопроизвольному перемещению золотников и включению гидроусилителей. Система управления практически не должна иметь люфтов
Задачей изобретения является создание суммирующего механизма, вносимого в систему управления несущего винта в конструкции системы управления вертолета, выполненной по трехточечной схеме с наклонным расположением гидроусилителей, которая позволяет обеспечить полную взаимную независимость каналов управления несущего винта.
Разработка суммирующего механизма и внесение его в систему управления несущего винта вертолета производится для случая, когда система управления выполнена по трехточечной схеме (при работе трех гидроприводов) и угол установки штоков гидроприводов по отношению к рычагам автомата перекоса отличается от 90° (т.е гидроприводы установлены наклонно).
Заявляемый суммирующий механизм для системы управления общим и циклическим шагом вертолетов может использоваться как самостоятельно, так и совместно с КСУ (комплексная, электронная, система управления, используемая на вертолетах АНСАТ-У), в качестве дублирующего канала.
Технический результат - суммирующий механизм реализует угол опережения управления и производит компенсацию наклонной установки гидроприводов, имеющуюся на вертолетах АНСАТ.
Задача решается тем, что в кинематическую схему управления несущего винта вертолетов, выполненную по трехточечной схеме (при работе трех гидроусилителей), вводится элемент (суммирующий механизм), реализующий угол опережения управления и имитирующий наклон гидроприводов.
Технический результат достигается тем, что суммирующий механизм для системы управления общим и циклическим шагом вертолетов трехточечной схемы управления с наклонным расположением гидроприводов включает систему входных качалок, связанных с ручками циклического шага по каналам «крен» и «тангаж», ползун, связанный с ручкой управления общего шага, с закрепленным на нем подвижным кронштейном, имеющим возможность поворачиваться в плоскости, перпендикулярной плоскости входных качалок, и перемещаться по направляющей неподвижной рамки, и соединенным через систему тяг с системой выходных качалок, для управления гидроприводами автомата перекоса.
Суммирующий механизм для вертолетов (АНСАТ) с гидромеханической системой управления (ГМСУ) является частью механической проводки управления, выполняющей сложение и преобразование управляющих перемещений, создаваемых летчиком в окончательные перемещения гидроприводов, управляющих автоматом перекоса.
Суммирующий механизм гидромеханического управления предназначен для преобразования перемещений каналов крена, тангажа и общего шага в перемещения каждого из трех гидроприводов, управляющих автоматом перекоса, расположенных на крышке главного редуктора вертолета, т.е. преобразования перемещений, создаваемых летчиком на ручках управления, в перемещения гидроприводов.
В результате внесения его в систему гидромеханического управления несущего винта вертолета получают угол опережения управления (смещения направления управляющего воздействия пилота относительно оси вращения несущего винта на заданный угол), а также компенсируют погрешности ходов штоков гидроприводов, обусловленных их наклонным расположением
Описание суммирующего механизма
Суммирующий механизм представлен на чертежах.
Фиг. 1 - вид слева.
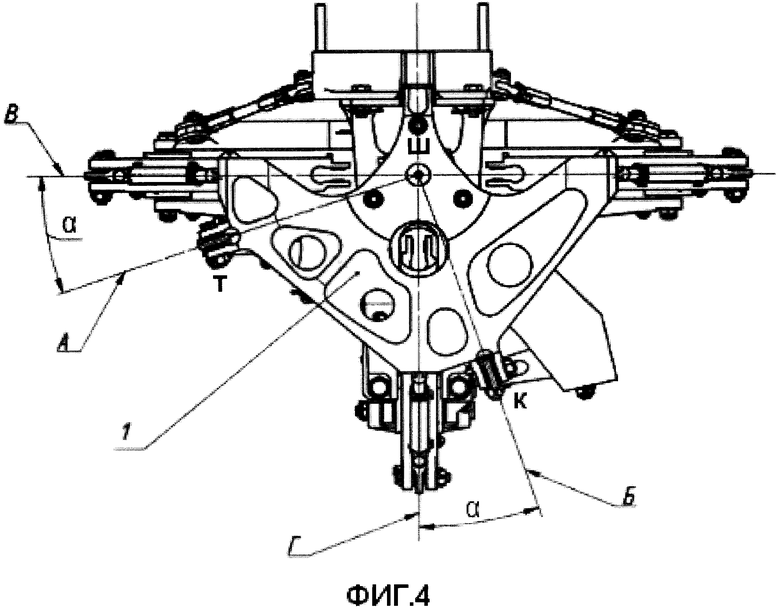
Фиг. 2 - вид снизу.
Фиг. 3 - продольное сечение по оси ползуна.
Фиг. 4 - вид спереди.
Суммирующий механизм состоит из:
- неподвижной рамки 14 (основание суммирующего механизма) (фиг. 3),
- направляющей 4 (фиг. 1, фиг. 3),
- ползуна 3, расположенного в центре рамки и имеющего возможность перемещаться в осевом направлении (фиг. 3),
- кронштейна 2, неподвижно закрепленного на ползуне 3 (фиг. 3),
- подвижного кронштейна 1, закрепленного на конце ползуна, имеющего возможность поворачиваться вокруг осей А, Б (фиг. 1, фиг. 4),
- сферы 5 (фиг. 3), на которой установлен подвижный кронштейн 1,
- выходных качалок поз. 10, 11 и 16, закрепленных на рамке 14 и соединенных тягами 12, 13 и 15 с кронштейном 1 (фиг. 2, фиг. 3),
- входных качалок. 6 и 7, шарнирно закрепленных на кронштейне 2 и соединенных тягами 8 и 9 с кронштейном 1 (фиг. 2).
Суммирующий механизм представляет собой геометрическое подобие наклонно расположенных гидроприводов РП-14 и управляемого ими нижнего кольца управления автомата перекоса. Так можно отметить подобие следующих узлов:
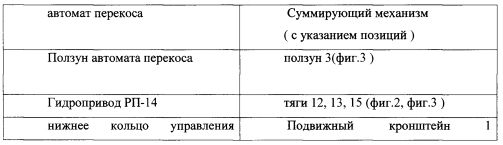
Движения выходных качалок 10, 11, 16 воспроизводят перемещения штоков гидроприводов, масштабируют величину перемещений до их реальных значений (все перемещения до суммирующего механизма выполнены в масштабе 1:2 от перемещений гидроприводов) и задают направление последующей проводки управления в компоновке вертолета (трассы всех каналов выставляются в одну линию).
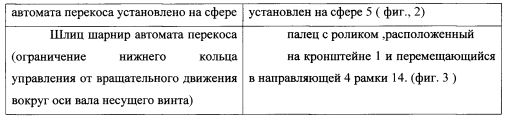
Смещение осей А и Б на угол α° относительно осей В и Г задает угол опережения управления за счет перемещения входных качалок 6 и 7 в плоскости АБ (см. фиг. 4).
Осуществление изобретения
Работа суммирующего механизма в системе управления общим и циклическим шагом вертолетов трехточечной схемы управления с наклонным расположением гидроприводов.
Суммирующий механизм располагается под правым блоком ручки общего шага и занимает полностью всю высоту нижней панели вертолета.
Летчик, управляя суммирующим механизмом, управляет непосредственно подвижным кронштейном 1, т.е. воспроизводит то, что ему нужно получить на нижнем кольце управления автомата перекоса, а настоящий автомат перекоса, установленный на главном редукторе, повторяет эти движения.
Сложение и преобразование перемещений в суммирующем механизме происходит на кронштейне 1. Управление подвижным кронштейном 1 осуществляется через систему тяг и качалок от ручек общего и циклического шага.
При управлении от ручки циклического шага: входные управляющие качалки 6 и 7 приводятся в движение летчиком от ручки циклического шага (входная качалка 6 работает по каналу «тангаж», входная качалка 7 - по каналу «крен») и передают через тяги 8 и 9 движение на кронштейн 1.
Кронштейн 1 передает полученные перемещения на выходные качалки поз. 10, 11 и 16 через тяги 12, 13 и 15.
На выходном плече качалок 10, 11 и 16 при этом получаются перемещения, равные необходимым перемещениям на входном звене гидропривода.
При управлении от ручки циклического шаг по каналу «тангаж» вращение кронштейна 1 происходит вокруг оси А.
При управлении от ручки циклического шаг по каналу «крен» вращение кронштейна 1 происходит вокруг оси Б.
При управлении от ручки общего шага: ползун 3 приводится в движение от ручки общего шага и перемещается вдоль своей оси. Вместе с ползуном перемещаются закрепленные на нем кронштейны 1 и 2
Перемещение кронштейна 1 приводит в движение выходные качалки 10, 11 и 16 через тяги 12, 13 и 15.
При отсутствии вращательного движения на входных качалках 6 и 7 движение кронштейна 1 от ручки общего шага будет плоскопараллельным, а перемещения выходных звеньев качалок 10, 11 и 16 - равными.
Сложение и преобразование перемещений в суммирующем механизме происходит на подвижном кронштейне 1.
По каналу крена управление через тягу 9 и входную качалку 7 приводится на точку К, по каналу тангажа управление через тягу 8 и входную качалку 6 приводится на точку Τ и по каналу общего шага - через ползун на точку Ш. (фиг. 4).
(точка К - место соединения кронштейна 1 с тягой 9,
точка Т - место соединения кронштейна 1 с тягой 8,
точка Ш - точка соединения кронштейна 1 со сферой 5, перемещающейся по направляющей 4)
Входные качалки 6 и 7 установлены через кронштейн 1 непосредственно на ползуне 3. Это необходимо для разделения движения общего шага и перемещений в каналах циклического шага. При перемещении ручки общего шага происходит перемещение ползуна 3, но входные качалки 6 и 7, двигаясь плоскопараллельно совместно с ползуном, не поворачиваются и движений по крену и тангажу не происходит. При перемещении в каналах «крен» и «тангаж» входные качалки 6 и 7 будут поворачиваться при неподвижном ползуне.
Как видно на фиг. 4, кронштейн 1 выполнен таким образом, что перемещения точки Т при неподвижных точках К и Ш (перемещения происходят в плоскости, перпендикулярной плоскости кронштейна) заставят его поворачиваться вокруг оси Б, что будет соответствовать отклонению автомата перекоса по тангажу (продольный канал).
Смещение оси Б на угол α° относительно оси Г задает угол опережения управления.
Управление по крену (поперечный канал) происходит аналогично. Перемещения точки К приводят к вращению кронштейна на оси А, что соответствует отклонению автомата перекоса по крену. Перпендикулярность осей А и Б исключает взаимовлияние каналов управления на кронштейне 1.
Перемещения гидроприводов моделируются поворотом выходных качалок 10, 11, 16, соединенных с кронштейном через тяги 12, 13, 15.
При работе суммирующего механизма происходит взаимное вычитание погрешностей, созданных наклонным расположением гидроприводов и таким же расположением тяг 12, 13, 15.
При движении ручки общего шага вал через тягу (не показано на чертеже) перемещает ползун 3. Ползун 3 задает плоскопараллельное перемещение кронштейна 1, которое приводит к плоскопараллельному перемещению нижнего кольца автомата перекоса и, следовательно, равному изменению угла установки лопастей. (В отличие от других вертолетов АНСАТ на машине АНСАТ с ГМСУ этот вал используется также для управления суммирующим механизмом).
Заявляемое изобретение соответствует критерию «новизна», т.к. из доступных источников информации не выявлены технические решения с такими же существенными признаками.
Заявляемое изобретение соответствует критерию «изобретательский уровень» так как является неочевидным для специалиста.
Заявляемое изобретение соответствует критерию «промышленная применимость», так как может быть получено из известных средств и известными методами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| Устройство управления несущим винтом модели вертолета | 1986 |
|
SU1397375A1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| ДВУХВИНТОВАЯ СООСНАЯ НЕСУЩАЯ СИСТЕМА С ЗЕРКАЛЬНЫМ РАСПОЛОЖЕНИЕМ АВТОМАТОВ ПЕРЕКОСА | 2007 |
|
RU2383470C2 |


Изобретение относится к области авиации, в частности к системам управления вертолетами. Суммирующий механизм для системы управления общим и циклическим шагом вертолетов трехточечной схемы управления с наклонным расположением гидроприводов включает систему входных качалок, ползун, подвижный и неподвижный кронштейны, неподвижную рамку. Входные качалки связаны с ручками циклического шага по каналам «крен» и «тангаж». Ползун связан с ручкой управления общего шага. Подвижный кронштейн, закрепленный на ползуне, имеет возможность поворачиваться в плоскости, перпендикулярной плоскости входных качалок, и перемещаться по направляющей неподвижной рамки. Подвижный кронштейн соединен через систему тяг с системой выходных качалок для управления гидроприводами автомата перекоса. Достигается реализация угла опережения управления и компенсация наклонной установки гидроприводов. 4 ил.
Суммирующий механизм для системы управления общим и циклическим шагом вертолетов трехточечной схемы управления с наклонным расположением гидроприводов, включающий систему входных качалок, связанных с ручками циклического шага по каналам «крен» и «тангаж», ползун, связанный с ручкой управления общего шага, с закрепленным на нем подвижным кронштейном, имеющим возможность поворачиваться в плоскости, перпендикулярной плоскости входных качалок, и перемещаться по направляющей неподвижной рамки, соединенным через систему тяг с системой выходных качалок для управления гидроприводами автомата перекоса.
| US 4121483 A, 24.10.1978 | |||
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| WO 2010134921 A1, 25.11.2010 | |||
| ВЕРТОЛЕТ С СООСНЫМИ НЕСУЩИМИ ВИНТАМИ | 2004 |
|
RU2265554C1 |

