Настоящее изобретение относится к летательному аппарату.
В частности, летательным аппаратом может быть летательный аппарат, способный зависать, такой как вертолет или конвертоплан.
Как известно, вертолеты содержат, по меньшей мере, один гидравлический контур и ряд исполнительных механизмов, приводимых в движение гидравлическим контуром и некоторые из которых выполняют основные функции, такие как управление пространственным положением в полете, например управление углом атаки лопастей несущего и/или рулевого винта. В случае неисправности, в частности уменьшения давления на исполнительные механизмы, угол атаки лопасти уже не является полностью управляемым и пространственное положение вертолета может быть в значительной степени нарушенным.
Падение давления гидравлического контура может иметь множество причин. Например, летательный аппарат обычно совершенствуется в течение длительного периода времени и длительного срока службы, на протяжении которого его постоянно оснащают новым оборудованием и исполнительными механизмами, которые должны подсоединяться к существующему гидравлическому контуру. Хотя такая модернизация предусмотрена конструкторскими расчетами и сертификацией, критерии первоначальной конструкции в некоторых случаях могут оказаться недостаточно консервативными вследствие длительного срока службы летательного аппарата, высоких темпов развития технологии и увеличивающихся требований заказчиков к обеспечению более высоких эксплуатационных характеристик.
В результате гидравлический контур, первоначально разработанный и сертифицированный, может оказаться неспособным обеспечивать исполнительные механизмы необходимым давлением во всех возможных рабочих режимах летательного аппарата.
Одно возможное решение заключается в том, чтобы изменить конструкцию и повторно сертифицировать гидравлическую систему. Однако это предполагает значительные затраты времени и средств.
Таким образом, в авиационной промышленности существует потребность в способе модернизации гидравлического оборудования летательного аппарата, избегая временных и денежных затрат, связанных с изменением конструкции и сертификацией модернизированной гидравлической системы.
Целью настоящего изобретения является обеспечение летательного аппарата, выполненного с возможностью удовлетворения, по меньшей мере, одного из упомянутых требований.
В соответствии с настоящим изобретением обеспечивают летательный аппарат, содержащий, по меньшей мере, одну систему управления пространственным положением в полете, в свою очередь содержащую: по меньшей мере, один исполнительный механизм; и гидравлический контур, соединенный с упомянутым, по меньшей мере, одним исполнительным механизмом и содержащий, по меньшей мере, один насос, выполненный с возможностью выдавать первый расход, когда давление гидравлического контура выше предварительно задаваемого порогового значения; причем упомянутый летательный аппарат отличается тем, что упомянутый насос выполнен с возможностью выдавать второй расход, больший, чем упомянутый первый расход; а также тем, что содержит:
- датчик для обнаружения величины, связанной с давлением упомянутого гидравлического контура; и
- программируемый центральный блок управления, который управляет упомянутым насосом, чтобы выдавать упомянутый второй расход, когда упомянутая величина, обнаруживаемая упомянутым датчиком, соответствует давлению упомянутого гидравлического контура ниже упомянутого порогового значения.
Настоящее изобретение также относится к способу управления гидравлическим контуром летательного аппарата; причем упомянутый гидравлический контур соединен с, по меньшей мере, одним исполнительным механизмом и содержит, по меньшей мере, один насос, выполненный с возможностью выдавать первый расход, когда давление упомянутого гидравлического контура выше предварительно задаваемого порогового значения;
причем упомянутый способ отличается тем, что содержит этапы:
- обнаружение величины, связанной с давлением упомянутого гидравлического контура; и
- увеличение расхода из упомянутого насоса, когда обнаруживаемая величина соответствует давлению упомянутого гидравлического контура ниже упомянутого порогового значения.
Настоящее изобретение также относится к способу повторной оценки летательного аппарата, содержащего:
- по меньшей мере, одну систему управления пространственным положением в полете, в свою очередь содержащую, по меньшей мере, один исполнительный механизм; и
- гидравлический контур, соединенный с упомянутым, по меньшей мере, одним исполнительным механизмом;
причем упомянутый способ отличается тем, что содержит этапы:
- соединение упомянутого гидравлического контура с насосом, выполненным с возможностью выдавать первый расход и второй расход, больший, чем упомянутый первый расход; причем упомянутый второй расход соответствует давлению упомянутого гидравлического контура, большему, чем давление сертификации гидравлического контура;
- соединение датчика с упомянутым гидравлическим контуром; причем упомянутый датчик обнаруживает величину, связанную с давлением упомянутого гидравлического контура; и
- программирование центрального блока управления для управления упомянутым насосом с возможностью выдавать упомянутый второй расход, когда упомянутая величина, обнаруживаемая упомянутым датчиком, соответствует давлению упомянутого гидравлического контура ниже предварительно задаваемого порогового значения.
Предпочтительный неограничивающий вариант осуществления настоящего изобретения будет описан в качестве примера со ссылкой на прилагаемые чертежи, на которых:
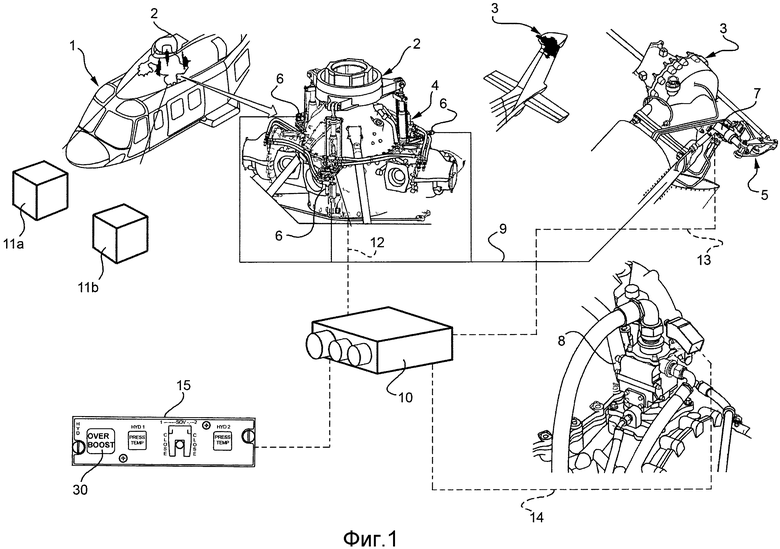
фиг.1 показывает схематичный общий вид составных частей контура в соответствии с настоящим изобретением;
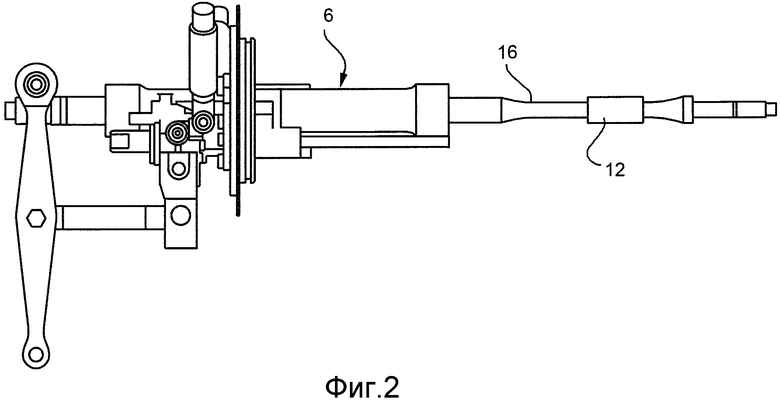
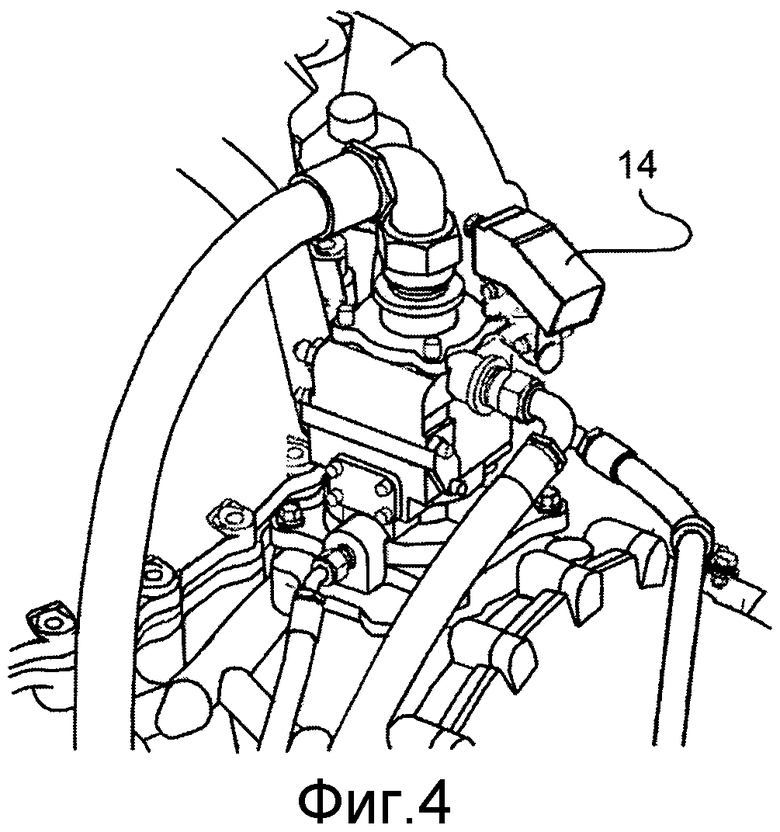
фиг.2, 3 и 4 показывают детали соответствующих составных частей контура, показанного на фиг.1.
На фиг.1 ссылочная позиция 1 обозначает летательный аппарат, способный зависать, - в показанном примере вертолет. Летательный аппарат 1 содержит несущий винт 2 и рулевой винт 3. Несущий винт 2 управляет лопастями несущего винта и содержит узел 4 исполнительного механизма для управления углом атаки лопастей несущего винта; и по аналогии рулевой винт 3 содержит узел 5 исполнительного механизма для управления углом атаки лопастей рулевого винта. Управление углом атаки лопастей несущего винта 2 и рулевого винта 3 управляет пространственным положением летательного аппарата 1. Узлы 4 и 5 исполнительных механизмов являются гидравлическими и предпочтительно содержат ряд линейных исполнительных механизмов 6 и 7 соответственно.
Летательный аппарат 1 содержит гидравлический контур, образованный посредством насоса 8 и нескольких линий 9 между насосом 8 и узлами 4 и 5 исполнительных механизмов.
Насос 8 выполнен с возможностью выдавать первый расход, когда давление гидравлического контура выше предварительно задаваемого порогового значения.
Насос 8 предпочтительно выполнен с возможностью выдавать второй расход, больший, чем первый расход, и летательный аппарат 1 содержит несколько датчиков 11а, 11b, 12, 13 для обнаружения величины, связанной с управляющим давлением исполнительных механизмов 6, 7; и программируемый центральный блок 10 управления для управления насосом 8, чтобы выдавать второй расход, когда величина, обнаруживаемая датчиками 11а, 11b, 12, 13, соответствует управляющему давлению исполнительных механизмов 6, 7 ниже порогового значения.
При применении к существующему летательному аппарату 1 для повторной оценки насос 8 имеет максимальное рабочее давление, которое выше, чем сертифицированное рабочее давление гидравлического контура. Данное рабочее давление называется "номинальным давлением нагнетания" в стандарте сертификации № MIL-P19692, регламентирующем военный летательный аппарат 1; причем подобные стандарты сертификации существуют и для гражданского летательного аппарата 1.
Датчики 11а, 11b обнаруживают рабочее давление исполнительных механизмов 6, 7; датчик 12 нагрузки установлен в узле 4 исполнительного механизма и обнаруживает движущую силу исполнительного механизма 6; а датчик 13 нагрузки установлен в узле 5 исполнительного механизма и обнаруживает движущую силу исполнительного механизма 7.
Датчики 12, 13 нагрузки и датчики 11а, 11b давления соединены и выдают данные в центральный блок 10 управления. Насос 8 предпочтительно представляет собой насос переменной производительности и содержит устройство 14 управления, соединенное с центральным блоком 10 управления, чтобы управлять расходом насоса 8. Другими словами, расход насоса 8 можно регулировать посредством центрального блока 10 управления.
Гидравлический контур содержит интерфейсный модуль 15, расположенный в кабине летчиков летательного аппарата 1 и который запрограммирован для тестирования работы центрального блока 10 управления, и содержит несколько управляемых пилотом световых и/или звуковых индикаторов.
На фиг.2 показан один из исполнительных механизмов 6 для управления углом атаки лопастей несущего винта 2. Датчик 12 нагрузки установлен для обнаружения любого нарушения в силе, прикладываемой исполнительным механизмом 6 к известному механизму регулирования угла наклона лопасти (не показанному), например установлен на стержне 16 линейного исполнительного механизма 6, и содержит, по меньшей мере, один тензометрический датчик, а предпочтительно несколько тензометрических датчиков, установленных по мостовой схеме, например по мостовой схеме Уитстона, чтобы усиливать регистрируемый сигнал.
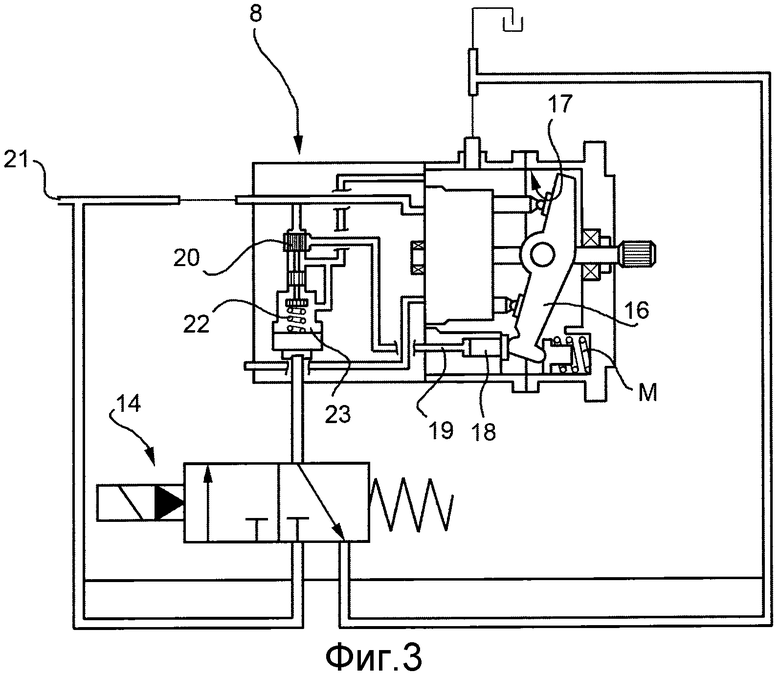
На фиг.3 показана функциональная схема насоса 8. Насос 8 представляет собой аксиально-поршневой насос с осевыми поршнями, поворачивающимися на диске 16, вращающемся вокруг оси; причем диск и поршни расположены в камере 17, соединенной со сливной емкостью (не показанной). Поворотный диск 16 приводится в движение приводным контуром, содержащим поршень 18, который воздействует на диск для регулирования угла его наклона; пружину М, которая действует в противовес поршню 18, чтобы удерживать диск 16 в положении максимальной подачи; трубопровод 19 для передачи давления подачи поршню 18; и золотниковый клапан 20 для регулирования давления между подачей 21 и поршнем 18.
Более конкретно, пружина М и поршень 18 взаимодействуют с соответствующими участками диска 16, эксцентричными относительно оси вращения диска 16.
Пружина 22 удерживает золотниковый клапан 20 в таком положении, чтобы перекрывать трубопровод 19 и отсекать давление подачи на поршень 18, и размещена в камере 23, которая соединена с емкостью или подачей 21 через устройство 14 управления. Более конкретно, пружина 22 и камера 23 выполнены таким образом, что, когда камера 23 соединена с подачей 21, пружина 22 размещает золотниковый клапан 20 так, чтобы перекрыть трубопровод 19, а когда устройство 14 управления соединяет камеру 23 с емкостью, давление подачи 21 превышает предварительную нагрузку пружины 22 и открывает золотниковый клапан 20, так что трубопровод 19 находится по существу под давлением подачи 21. Более конкретно, пружина М предварительно нагружена таким образом, что угол наклона поворотного диска 16 уменьшается, когда трубопровод 19 находится под давлением подачи 21.
Центральный блок 10 управления запрограммирован для осуществления цикла повышения давления заданной длительности - предпочтительно 30 секунд, в конце которого устройство 14 управления автоматически переключается в нормальное рабочее положение.
Во время цикла повышения давления насос 8 выдает второй расход.
Кроме того, если датчики 12, 13 нагрузки по-прежнему регистрируют нарушения, то цикл повышения давления может быть повторен, таким образом, давление подается достаточно долго, чтобы выполнить маневр, но без чрезмерной вынужденной работы системы в условиях максимальной нагрузки. В условиях максимальной нагрузки фактически в дополнение к большему механическому напряжению текучая среда гидравлической системы перегревается, тем самым создавая также термическое напряжение, которое не должно превышать заданного порогового значения, превышение которого может привести к повреждению.
Интерфейсный модуль 15 содержит ручное управление 30 для пилота, выполненное с возможностью приводить в действие устройство 14 управления независимо от центрального блока 10 управления.
При нормальных рабочих условиях ниже максимального расхода насос 8 выдает первый расход, который выше предварительно задаваемого порогового значения, и также обеспечивает гидравлическую мощность, т.е. расход и давление, требуемые исполнительными механизмами 6, 7, управляющими устройствами на летательном аппарате 1. Правильная работа исполнительных механизмов 6, 7 контролируется датчиками 11а, 11b, 12, 13 давления и нагрузки, поэтому давление гидравлического контура всегда выше предварительно задаваемого порогового значения, сохраняемого в центральном блоке 10 управления. В этом случае устройство 14 управления разгружает камеру 23, поэтому трубопровод 19 находится под давлением подачи 21, и поршень 18 воздействует на поворотный диск 16, чтобы сжать пружину М и установить насос 8 на менее чем максимальный расход. В случае очень высокой мощности, требуемой узлами 4 и 5 исполнительных механизмов, например, когда узлы 4 и 5 исполнительных механизмов, соединенные с гидравлическим контуром, приведены в действие одновременно, чтобы осуществлять особенно сложные маневры, давление гидравлического контура может упасть ниже порогового значения и стать недостаточно высоким, для того чтобы обеспечить правильную работу исполнительных механизмов 6 и 7. Данное падение давления обнаруживается датчиками 11а, 11b давления в гидравлическом контуре и даже более легко датчиками 12, 13 нагрузки на исполнительных механизмах 6 и 7.
Если центральный блок 10 управления принимает из датчиков 12, 13 нагрузки аномальные сигналы, устройство 14 управления переключается, чтобы соединить камеру 23 с давлением подачи 21, и трубопровод 19 разгружается. Таким образом, давление на поршень 18 снижается, и пружина М перемещает поворотный диск 16 в положение максимального наклона, т.е. максимального расхода, таким образом увеличивая давление гидравлического контура, обеспечивая необходимую гидравлическую мощность, чтобы приводить в действие все гидравлические устройства, задействованные в данном маневре.
Настоящее изобретение имеет следующие преимущества.
Когда датчики 11а, 11b, 12, 13 обнаруживают падение давления гидравлического контура ниже порогового значения, например в случае сложных маневров, центральный блок 10 управления управляет насосом 8, чтобы выдавать второй расход и восстановить давление гидравлического контура выше порогового значения.
Благодаря этому можно, например, выполнять сложные маневры, удерживая полное управление летательным аппаратом 1.
При помощи датчиков 11а, 11b, 12, 13 можно мгновенно обнаружить недостаточное рабочее усилие исполнительных механизмов 6 и 7, поэтому летательный аппарат всегда является управляемым, даже в экстремальных условиях.
Максимальное перемещение, т.е. максимальный расход насоса 8 достигается, когда предварительная нагрузка пружины М превышает нагрузку поршня 18, таким образом уменьшая время реагирования для переключения на конфигурацию максимального расхода.
Тот факт, что насос 8 выдает второй расход, соответствующий увеличению давления гидравлического контура, в течение заданного периода времени, предотвращает перегрузку элементов контура и является также дополнительным фактором в соответствии регламентам Национального авиационного совета, не требуя повторной сертификации гидравлического контура, если насос 8 и центральный блок 10 управления установлены как часть повторной оценки действующего летательного аппарата. В последнем случае максимальное давление насоса 8 должно находиться в пределах между рабочим давлением и максимальным давлением, для которого был сертифицирован гидравлический контур.
В этом случае центральный блок 10 управления летательного аппарата 1 может быть перепрограммирован только для действия насоса 8 с повышением давления, т.е. когда камера 14 управления разгружает камеру 23, в аварийных условиях и в течение ограниченного периода времени, поэтому повторная сертификация гидравлического контура уже не требуется, при этом обеспечивая также подсоединение к контуру модернизированных устройств.
Очевидно, в летательном аппарате 1, описанном и проиллюстрированном в данном документе, могут быть выполнены изменения, но без выхода за рамки объема охраны, определенного в прилагаемой формуле изобретения.
В частности, тот же самый принцип также применим к летательному аппарату с неподвижным крылом, в котором гидравлический контур соединен с исполнительными механизмами системы управления пространственным положением в полете, такими как закрылки и/или руль направления.
Летательным аппаратом 1 может быть также конвертоплан.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ЛЕТАТЕЛЬНОМ АППАРАТЕ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ КОНСТРУКЦИЯ ДЛЯ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2610358C2 |
| ПИТАНИЕ ТОПЛИВОМ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2399778C2 |
| СПОСОБ И ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВРАЩАЮЩЕЙСЯ НЕСУЩЕЙ ПОВЕРХНОСТЬЮ, ОБОРУДОВАННЫЙ ТРЕМЯ ДВИГАТЕЛЯМИ | 2013 |
|
RU2565163C2 |
| КВАДРОКОПТЕР С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ НЕСУЩИХ ВИНТОВ С ФИКСИРОВАННЫМ ШАГОМ ЛОПАСТЕЙ | 2020 |
|
RU2732305C1 |
| СИСТЕМЫ ПОДАЧИ ТОПЛИВА ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2627883C2 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| ПЕРЕДНЯЯ ОПОРА ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА С ЕДИНЫМ УСТРОЙСТВОМ УПРАВЛЕНИЯ ДЛЯ ПОДЪЕМА И НАПРАВЛЕНИЯ | 2010 |
|
RU2544025C2 |
| Мультироторная летающая платформа с гидроприводом вращения несущих винтов | 2022 |
|
RU2799957C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029891C1 |
| АППАРАТ ДЛЯ ПРОМЫВКИ И ОБЕЗВОЖИВАНИЯ ВОЛОКНИСТОЙ МАССЫ, СИСТЕМА УПРАВЛЕНИЯ ТАКИМ АППАРАТОМ И СПОСОБ ОБРАБОТКИ ВОЛОКНИСТОЙ МАССЫ В ТАКОМ АППАРАТЕ | 2017 |
|
RU2725035C1 |
Изобретение относится к области авиации, в частности к конструкциям гидравлических систем летательных аппаратов. Летательный аппарат (1) имеет систему (4, 5) управления пространственным положением в полете, в свою очередь имеющую, по меньшей мере, один исполнительный механизм (6, 7) и гидравлический контур, соединенный с исполнительным механизмом (6, 7). Гидравлический контур содержит, по меньшей мере, один насос (8), выполненный с возможностью выдавать первый расход, когда давление гидравлического контура выше предварительно задаваемого порогового значения. Насос (8) выполнен с возможностью выдавать второй расход, больший, чем первый расход, причем летательный аппарат (1) имеет датчик (11а, 11b, 12, 13) для обнаружения величины, связанной с давлением гидравлического контура, и программируемый центральный блок (10) управления, который управляет насосом (8), чтобы выдавать второй расход, когда величина, обнаруживаемая датчиком (11а, 11b, 12, 13), соответствует давлению гидравлического контура ниже порогового значения. Способ управления гидравлическим контуром включает обнаружение величины, связанной с давлением упомянутого гидравлического контура, увеличение расхода из упомянутого насоса, когда упомянутая величина, обнаруживаемая упомянутым датчиком, соответствует давлению упомянутого гидравлического контура ниже упомянутого порогового значения. Достигается возможность модернизации гидравлического оборудования без изменения гидравлического контура. 3 н. и 12 з.п. ф-лы, 4 ил.
1. Летательный аппарат, содержащий:
- по меньшей мере, одну систему управления пространственным положением в полете, в свою очередь содержащую, по меньшей мере, один исполнительный механизм; и
- гидравлический контур, соединенный с упомянутым, по меньшей мере, одним исполнительным механизмом и содержащий, по меньшей мере, один насос, выполненный с возможностью выдавать первый расход, когда давление гидравлического контура выше предварительно задаваемого порогового значения;
отличающийся тем, что упомянутый насос выполнен с возможностью выдавать второй расход, больший, чем упомянутый первый расход;
причем упомянутый летательный аппарат также отличается тем, что содержит:
- датчик для обнаружения величины, связанной с давлением упомянутого гидравлического контура; и
- программируемый центральный блок управления, который управляет упомянутым насосом, чтобы выдавать упомянутый второй расход, когда упомянутая величина, обнаруживаемая упомянутым датчиком, соответствует давлению упомянутого гидравлического контура ниже упомянутого порогового значения.
2. Летательный аппарат по п.1, отличающийся тем, что упомянутый датчик представляет собой датчик нагрузки, соединенный с упомянутым исполнительным механизмом для определения нагрузки на упомянутый исполнительный механизм.
3. Летательный аппарат по п.2, отличающийся тем, что упомянутый датчик содержит тензометрический датчик.
4. Летательный аппарат по п.1, отличающийся тем, что упомянутый датчик представляет собой датчик для определения давления упомянутого гидравлического контура.
5. Летательный аппарат по п.1, отличающийся тем, что содержит управляемый пилотом интерфейс, имеющий управление, приводимое в действие пилотом, чтобы управлять упомянутым насосом (8), чтобы выдавать упомянутый второй расход.
6. Летательный аппарат по п.1, отличающийся тем, что представляет собой вертолет, содержащий несущий винт и/или рулевой винт;
причем упомянутая система управления пространственным положением в полете содержит узел для управления углом атаки лопастей несущего винта и/или рулевого винта.
7. Летательный аппарат по п.1, отличающийся тем, что упомянутый насос представляет собой насос переменной производительности.
8. Летательный аппарат по п.7, отличающийся тем, что упомянутый насос представляет собой аксиально-поршневой насос и содержит диск, вращающийся вокруг оси; и пружину и гидравлический поршень, которые взаимодействуют с упомянутым диском эксцентрично относительно упомянутой оси, вокруг которой вращается упомянутый диск; причем упомянутый гидравлический поршень работает в противовес упомянутой пружине, чтобы управлять наклоном упомянутого диска относительно упомянутой оси.
9. Летательный аппарат по п.8, отличающийся тем, что упомянутая пружина и упомянутый гидравлический поршень выполнены таким образом, что, когда упомянутый насос выдает упомянутый второй расход, нагрузка упомянутой пружины больше, чем нагрузка упомянутого гидравлического поршня.
10. Летательный аппарат по п.9, отличающийся тем, что упомянутый гидравлический поршень выполнен с возможностью соединения с давлением подачи упомянутого насоса или с давлением нагнетания посредством электромагнитного клапана, соединенного с упомянутым центральным блоком управления.
11. Летательный аппарат по п.10, отличающийся тем, что упомянутый электромагнитный клапан выполнен с возможностью управления посредством упомянутого управления.
12. Летательный аппарат по п.1, отличающийся тем, что упомянутый второй расход соответствует давлению упомянутого гидравлического контура, большему, чем давление сертификации гидравлического контура.
13. Летательный аппарат по п.1, отличающийся тем, что упомянутый центральный блок управления выполнен с возможностью программирования для управления упомянутым насосом, чтобы выдавать упомянутый второй расход в течение заданного периода времени.
14. Способ управления гидравлическим контуром летательного аппарата; причем упомянутый гидравлический контур соединен с, по меньшей мере, одним исполнительным механизмом и содержит, по меньшей мере, один насос, выполненный с возможностью выдавать первый расход, когда давление упомянутого гидравлического контура выше предварительно задаваемого порогового значения;
причем упомянутый способ отличается тем, что содержит этапы:
- обнаружение величины, связанной с давлением упомянутого гидравлического контура; и
- увеличение расхода из упомянутого насоса, когда упомянутая величина, обнаруживаемая упомянутым датчиком, соответствует давлению упомянутого гидравлического контура ниже упомянутого порогового значения.
15. Способ повторной оценки летательного аппарата, содержащего:
- по меньшей мере, одну систему управления пространственным положением в полете, в свою очередь содержащую, по меньшей мере, один исполнительный механизм; и
- гидравлический контур, соединенный с упомянутым, по меньшей мере, одним исполнительным механизмом;
причем упомянутый способ отличается тем, что содержит этапы:
- соединение упомянутого гидравлического контура с насосом, выполненным с возможностью выдавать первый расход и второй расход, больший, чем упомянутый первый расход; причем упомянутый второй расход соответствует давлению упомянутого гидравлического контура, большему, чем давление сертификации гидравлического контура;
- соединение датчика с упомянутым гидравлическим контуром; причем упомянутый датчик обнаруживает величину, связанную с давлением упомянутого гидравлического контура; и
- программирование центрального блока управления для управления упомянутым насосом, чтобы выдавать упомянутый второй расход, когда упомянутая величина, обнаруживаемая упомянутым датчиком, соответствует давлению упомянутого гидравлического контура ниже предварительно задаваемого порогового значения.
| US 6209825 B1, 03.04.2001 | |||
| СПОСОБ СНИЖЕНИЯ МАССЫ ГИДРОСИСТЕМЫ | 1996 |
|
RU2119103C1 |
| EP 2003056 A2, 17.12.2008; | |||
| Гидравлическая система вертолета | 1972 |
|
SU448694A1 |

