Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственной рабочей машине согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Понятие «сельскохозяйственная рабочая машина» в смысле настоящего изобретения имеет широкое толкование. Оно охватывает не только уборочные машины, например зерноуборочные и кормоуборочные комбайны, но и тягачи, например тракторы или иные подобные машины.
В связи с растущей автоматизацией сельскохозяйственных рабочих машин такие машины в настоящее время часто видеосистемами и другими системами датчиков, помогающими оператору в управлении машиной и выполнении сельскохозяйственных работ. В частности, таким образом можно контролировать и управлять сельскохозяйственными рабочими агрегатами сельскохозяйственной рабочей машины, то есть компонентами и устройствами, в частности, навесным оборудованием, предназначенным для выполнения сельскохозяйственных работ или помощи в их выполнении.
Известная сельскохозяйственная машина (US 8,712,144 В2), положенная в основу изобретения, оснащена видеосистемой, в состав которой входит 3D-камера, в частности, выполняющая съемку произрастающей на поле сельскохозяйственной культуры перед сельскохозяйственной рабочей машиной и способная генерировать соответствующую 3D-информацию. Для этого 3D-камера оборудована двумя объективами, позволяющими выполнять съемку стереоскопических пар изображений по двум различным визуальным осям. При этом каждая из двух визуальных осей проходит от оптического центра соответствующего объектива камеры в направлении съемки. При этом оба объектива камеры и, соответственно, их оптические центры расположены на так называемой базисной линии, проходящей в горизонтальной плоскости. Горизонтальная плоскость привязана к сельскохозяйственной рабочей машине и проходит параллельно ее опорной поверхности. Таким образом, оптические центры в уровне техники расположены друг рядом с другом в направлении, параллельном поверхности подлежащего обработке грунта.
3D-камера известной сельскохозяйственной рабочей машины подходит для съемки произрастающей на поле сельскохозяйственной культуры в направлении движения и генерирования 3D-информации (информации о ширине, высоте и глубине объектов и/или расстоянии между объектами) на основании этой съемки. Однако, в случае смещения в сторону от рядов растений, например, для обработки грунта между рядами растений, ряды растений или их положение распознаются относительно неточно, поскольку объективы камеры вследствие удаления друг от друга, так называемого базиса, обнаруживают соответствующий ряд растений с различных направлений. Это приводит к определенной нечеткости съемки и, соответственно, к неточности 3D-информации. Это, в свою очередь, влияет на точность обработки произрастающей на поле сельскохозяйственной культуры соответствующим сельскохозяйственным рабочим агрегатом, например, механической мотыгой или культиватором. Точность дополнительно снижается сорняками, произрастающими вокруг растений сельскохозяйственной культуры, в частности, если их высота равна высоте растений сельскохозяйственной культуры.
Раскрытие сущности изобретения
Задачей изобретения является исполнение и совершенствование известной сельскохозяйственной рабочей машины таким образом, чтобы можно было повысить точность обработки посредством сельскохозяйственного рабочего агрегата при проезде произрастающей на поле сельскохозяйственной культуры.
Поставленная задача решена сельскохозяйственной рабочей машиной согласно ограничительной части пункта 1 формулы изобретения с признаками, раскрытыми в отличительной части пункта 1 формулы.
Существенная идея изобретения заключается в том, что при наклоненной относительно горизонтали, в частности горизонтальной плоскости, базисной линии 3D-камеры, то есть линии, соединяющей оптические центры 3D-камеры, горизонтальное расстояние между оптическими центрами меньше базиса (абсолютного расстояния между оптическими центрами) 3D-камеры. В случае расположения базисной линии в вертикальной плоскости, то есть наклона относительно горизонтальной плоскости на 90%, оптические центры располагаются даже в общей вертикальной плоскости, вследствие чего горизонтальное расстояние между оптическими центрами равно нулю. Такая ориентация 3D-камеры выгодна тем, что две визуальные оси или направления съемки 3D-камеры расположены в горизонтальном направлении ближе друг к другу или, в случае точно вертикальной ориентации базовой линии в вертикальной плоскости, не отстоят друг от друга, в результате чего можно более точно распознавать, по существу, растущие вертикально растения сельскохозяйственной культуры и соответствующие ряды растений сельскохозяйственной культуры. В отличие от уровня техники, в котором базисная линия между оптическими центрами проходит горизонтально, предложенный вариант уменьшает, а в идеальном случае даже исключает нечеткость в краевой области растений или рядов растений и соответствующий риск ошибочного распознавания. 3D-информация о произрастающей на поле сельскохозяйственной культуре, в частности положении и/или высоте соответствующих растений сельскохозяйственной культуры или ряда растений сельскохозяйственной культуры, генерируемая видеосистемой посредством 3D-камеры, соответственно, намного точнее таковой в уровне техники и позволяет более точно обрабатывать произрастающую на поле сельскохозяйственную культуру, например, посредством сельскохозяйственного рабочего агрегата в форме механической мотыги или культиватора.
По существу предложено, чтобы базисная линия используемой согласно изобретению 3D-камеры сельскохозяйственной рабочей машины, соединяющая оптические центры, из которых выходят визуальные оси, была наклонена относительно горизонтальной плоскости и проходила, предпочтительно, в вертикальной плоскости (пункт 2 формулы). Под 3D-камерой понимают, в частности, стереокамеру, то есть камеру, в частности, с двумя объективами для съемки отдельных изображений стереоскопической пары изображений. Специальные варианты стереокамер оснащаются большим количеством объективов, например, четырьмя объективами, и также входят в понятие вышеупомянутой стереокамеры. Кроме того, можно использовать камеры всего с одним объективом, способные посредством оптической насадки создавать стереоскопические пары изображений из отдельных изображений пары. По существу, также возможен вариант с использованием двух отдельных камер, каждая из которых снимает отдельные изображения, объединяемые или преобразуемые в стереоскопические пары изображений. Общее свойство всех подобных 3D-камер заключается в том, что они способны вести съемку произрастающей на поле сельскохозяйственной культуры, в частности, перед сельскохозяйственной рабочей машиной и/или перед сельскохозяйственным рабочим агрегатом, и генерировать 3D-информацию о произрастающей на поле сельскохозяйственной культуре путем съемки стереоскопических пар изображений вдоль двух различных визуальных осей, причем указанные визуальные оси отходят от оптических центров 3D-камеры или отдельных объективов, соединенных друг с другом, в свою очередь, базисной линией.
В предпочтительных вариантах осуществления согласно пункту 3 или 4 видеосистема и/или 3D-камера выполнена с возможностью регулировки, в частности с возможностью поворота и/или изменения высоты. Возможность поворота позволяет изменять угол визуальных осей относительно горизонтальной плоскости или грунта. Возможность изменения высоты позволяет регулировать оптические центры или исходную точку обоих двух визуальных осей по вертикали. Обе настройки позволяют индивидуально подстраиваться под различные типы сельскохозяйственных культур и/или плодов.
Пункт 5 относится к предпочтительным вариантам осуществления используемой 3D-камеры.
Пункт 6 относится к 3D-информации, генерируемой с помощью 3D-камеры, которая может представлять собой, в частности, информацию о высоте растений сельскохозяйственной культуры, о расстоянии между растениями сельскохозяйственной культуры поперек (перпендикулярно) направления движения, то есть о расстоянии между рядами растений, о расстоянии между растениями сельскохозяйственной культуры по направлению движения и/или о составляющих частях растений, в частности о листьях и стеблях растений сельскохозяйственной культуры. Кроме того, 3D-информация может содержать информацию о сорняках, в частности, о высоте сорняков, расстоянии между сорняками поперек направления движения, расстоянии между сорняками по направлению движения и т.п.
В варианте осуществления согласно пункту 7 видеосистема выполнена с возможностью генерирования цветовой информации о произрастающей на поле сельскохозяйственной культуре с помощью 3D-камеры. Это позволяет, например, отличать растения сельскохозяйственной культуры от сорняков и/или растения сельскохозяйственной культуры от полевого грунта. Цветовая информация может представлять собой, в том числе, информацию о цвете составляющих растений сельскохозяйственной культуры и/или сорняков. Например, на основании различных цветов можно отличать стебли от листьев или распознавать одревеснение. Также можно судить о степени зрелости и/или содержании азота.
Согласно пункту 8 формулы 3D-камера выполнена с возможностью переключения между 3D-режимом и 20-режимом. В 3D-режиме камера генерирует упомянутую 3D-информацию, а в 20-режиме - цветовую информацию. Совокупность информации, то есть 3D-информации и цветовой информации, можно впоследствии использовать, в частности, для максимально точного определения высоты и/или положения растений сельскохозяйственной культуры и/или сорняков. При этом возможен вариант, в котором в 20-режиме система будет получать и обрабатывать моноскопические изображения, то есть изображения без 3D-информации, по одной из визуальных осей. В частности, для получения таких изображений в 20-режиме активен только один объектив 3D-камеры. Также возможен вариант, в котором моноскопические изображения получают с помощью двух или более объективов 3D-камеры и затем обрабатывают. Также возможно раскладывать стереоскопические пары изображений, получаемые 3D-камерой, на отдельные изображения, и обрабатывать указанные изображения по отдельности в 20-режиме, чтобы на их основе генерировать соответствующую цветовую информацию (пункт 8 формулы).
Дополнительно к вышеупомянутой видеосистеме с 3D-камерой, образующей первую систему датчиков, в предпочтительном варианте осуществления согласно пункту 10 формулы может быть предусмотрена по меньшей мере одна дополнительная система датчиков, способная генерировать данные датчиков при помощи по меньшей мере одного датчика. Под датчиком может пониматься, например, датчик скорости, датчик рабочей высоты (для определения рабочей высоты рабочего агрегата) или датчик угла поворота.
Все такие данные датчиков, то есть 3D-информация, цветовая информация и/или дополнительные данные датчиков, могут использоваться системой помощи оператору сельскохозяйственной рабочей машины для управления сельскохозяйственной рабочей машиной и/или сельскохозяйственным рабочим агрегатом (пункт 11 формулы). В частности, это позволяет оптимально ориентировать сельскохозяйственный рабочий агрегат относительно рядов растений.
Краткое описание чертежей
Предложенное изобретение детально рассмотрено ниже на основании варианта осуществления, изображенного на фигурах:
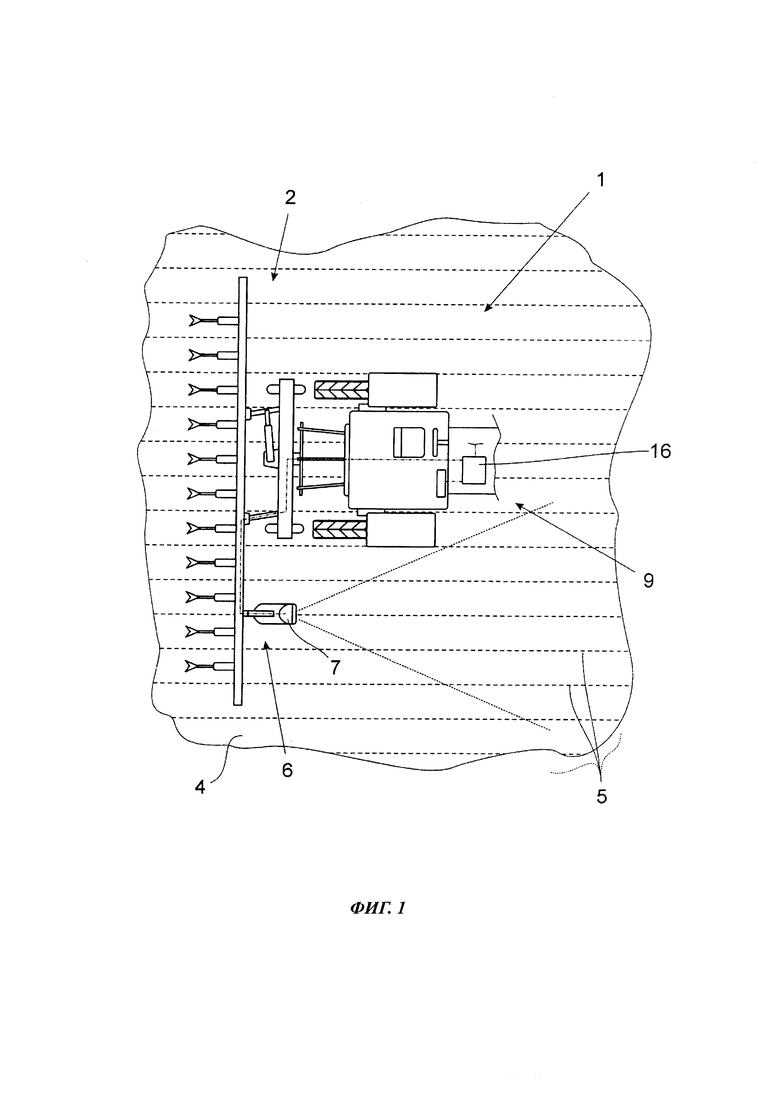
Фигура 1: предложенная изобретением сельскохозяйственная рабочая машина с сельскохозяйственным рабочим агрегатом в рабочей ситуации.
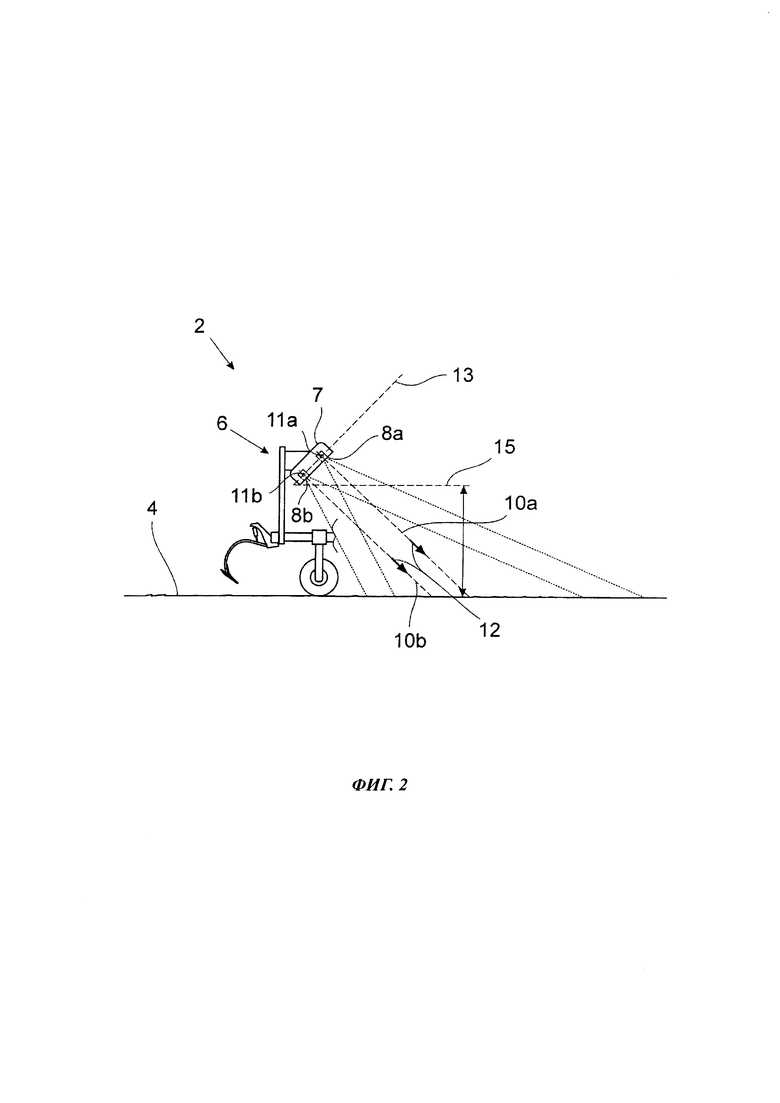
Фигура 2: вид сбоку сельскохозяйственного рабочего агрегата сельскохозяйственной рабочей машины с фигуры 1 с установленной 3D-камерой.
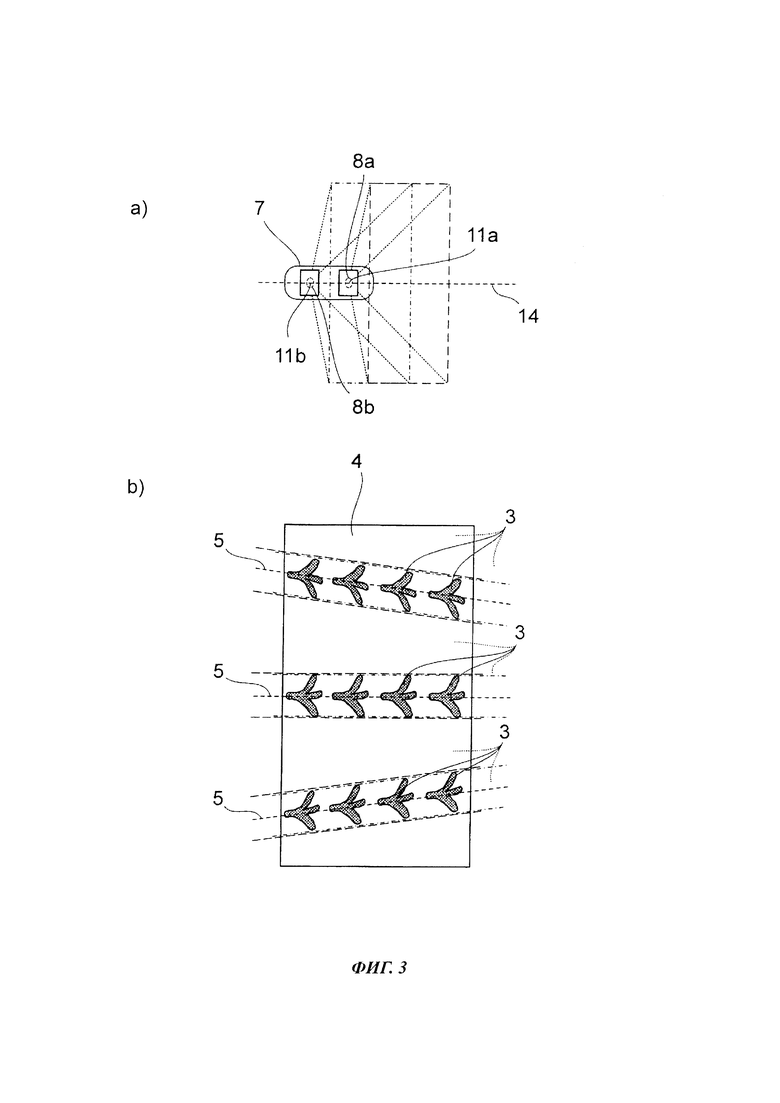
Фигура 3: а) вид сверху 3D-камеры сельскохозяйственной рабочей машины с фиг. 1; b) область произрастающей на поле сельскохозяйственной культуры, снимаемая 3D-камерой.
Осуществление изобретения
Предложенное решение может быть применено к различным сельскохозяйственным рабочим машинам, в частности, самоходным сельскохозяйственным рабочим машинам. К ним относятся тягачи, в частности тракторы, и уборочные машины, в частности зерноуборочные и кормоуборочные комбайны, а также иная подобная техника. В представленном предпочтительном варианте осуществления под сельскохозяйственной рабочей машиной 1 понимают трактор, обычным образом оснащенный сельскохозяйственным рабочим агрегатом 2 в виде навесного агрегата. Под сельскохозяйственным рабочим агрегатом 2 понимают, например, механическую мотыгу или культиватор. Варианты осуществления, относящиеся к трактору и подобному сельскохозяйственному рабочему агрегату, применимы, соответственно, к любым иным типам сельскохозяйственных рабочих машин или сельскохозяйственных рабочих агрегатов.
Сельскохозяйственная рабочая машина 1 и сельскохозяйственный рабочий агрегат 2 эксплуатируются оператором (водителем), причем в качестве помощи в управлении предусмотрена система 16 помощи оператору, способная управлять, например, скоростью и/или углом поворота сельскохозяйственной рабочей машины 1 и/или рабочей высотой сельскохозяйственного рабочего агрегата 2, в частности, в полностью автоматическом режиме. Управление сельскохозяйственной рабочей машиной 1 и/или сельскохозяйственным рабочим агрегатом 2 посредством системы 16 помощи оператору позволяет особенно точно обрабатывать произрастающую на поле сельскохозяйственную культуру, содержащую множество растений. Например, с помощью представленного сельскохозяйственного рабочего агрегата 2 в виде механической мотыги или культиватора можно особенно точно и без пропусков обрабатывать, например, разрыхлять грунт 4 между растениями 3 сельскохозяйственной культуры, не повреждая их. При этом область между растениями 3 сельскохозяйственной культуры распознается с высокой точностью даже в том случае, если она заросла сорняками. В частности, можно особенно точно распознавать ряды 5 растений с несколькими растениями 3 сельскохозяйственной культуры, что будет детально объяснено ниже.
Предложенная изобретением сельскохозяйственная рабочая машина 1 содержит видеосистему 6 с 3D-камерой 7, которая в данном случае и предпочтительно представляет собой стереокамеру с двумя объективами 8а и 8b. 3D-камера 7 в данном случае и предпочтительно установлена на сельскохозяйственном рабочем агрегате 2, но может быть также, по существу, расположена на транспортном средстве 9, на котором установлен рабочий агрегат 2.
Видеосистема 6 выполнена с возможностью съемки при помощи 3D-камеры 7 произрастающей на поле сельскохозяйственной культуры, то есть растений 3 или рядов 5 растений 3 сельскохозяйственной культуры, в частности, в направлении движения перед сельскохозяйственным рабочим агрегатом 2, и генерирования соответствующей 3D-информации о произрастающей на поле сельскохозяйственной культуре путем съемки 3D-камерой 7 стереоскопических пар изображений по двум различным визуальным осям 10а, 10b. В данном случае под визуальными осями 10а, 10b понимают оси, проходящие от оптических центров 11а, 11b 3D-камеры 7 или объективов 8а и 8b 3D-камеры 7 в направлении 12 съемки. Как показано в качестве примера на фигуре 2, направление 12 съемки 3D-камеры 7 в данном случае наклонено примерно на 45° к горизонтальной плоскости 15. Оптические центры 11а, 11b 3D-камеры 7 соединены друг с другом базизной линией 13, которая наклонена относительно горизонтальной плоскости 15, в данном случае также на 45°. Базисная линия 13 проходит, как показано на фигуре 2, в данном случае и предпочтительно в плоскости 14, ориентированной перпендикулярно к горизонтальной плоскости 15.
Преимущество такой ориентации видеосистемы 6 или 3D-камеры 7 заключается в том, что визуальные оси 10а, 10b в данном случае и предпочтительно проходят в одной и той же вертикальной плоскости 14 и, следовательно, в данном случае не отстоят на расстоянии друг от друга по горизонтали. Такое горизонтальное расстояние или смещение, имеющее место в уровне техники, приводит к невозможности точного распознавания рядов 5 растений. Предложенная изобретением сельскохозяйственная рабочая машина 1 снижает вероятность или устраняет ошибки, обусловленные таким смещением в горизонтальной плоскости. Таким образом, можно особенно точно распознавать положение и/или высоту отдельных растений 3 или рядов 5 растений сельскохозяйственной культуры, что показано на фигуре 3b (в данном случае отсутствует заметное смещение между граничными линиями рядов 5 растений, определенными с помощью 3D-камеры 7), и, соответственно, особенно точно и полностью обрабатывать произрастающую на поле сельскохозяйственную культуру, как было указано выше.
В особенно предпочтительном варианте видеосистема 6 и/или 3D-камера 7 выполнена с возможностью поворота и/или вертикальной регулировки по высоте в плоскости, наклоненной по отношению к горизонтальной плоскости 15, в частности в плоскости 14, перпендикулярной горизонтальной плоскости 15. Таким образом, 3D-камеру 7 можно адаптировать к различным условиям, в частности к различным видам сельскохозяйственных культур и/или плодов.
Как было указано выше, 3D-камера 7 в данном случае и предпочтительно содержит два объектива 8а и 8b, от каждого из которых отходит соответствующая визуальная ось 10а или 10b. По существу, возможен также вариант, в котором 3D-камера 7 будет иметь единственный объектив и оптическую насадку (не показанную на фигуре), формирующую стереоскопические пары изображений. Также возможно использование двух отдельных камер (не показанных на фигуре) для создания соответствующих стереоскопических пар изображений.
3D-информация, генерированная с помощью 3D-камеры 7, в данном случае и предпочтительно представляет собой информацию о высоте растений 3 сельскохозяйственной культуры, о расстоянии между растениями 3 сельскохозяйственных культур поперек направления движения и, следовательно, расстоянии между рядами 5 растений, об участке растений 3 сельскохозяйственной культуры в направлении движения и/или составляющих растений 3 сельскохозяйственной культуры (последнее необходимо, в частности, для различения листьев и стеблей растений 3 сельскохозяйственной культуры). По существу, также возможен вариант, в котором в качестве 3D-информации генерируется информация о высоте сорняков, расстоянии между сорняками поперек направления движения, расстоянии между сорняками в направлении движения и т.д.
Кроме того, предложенная изобретением видеосистема 6 или 3D-камера 7 в данном случае и предпочтительно выполнена с возможностью генерирования цветовой информации, в частности информации о цвете произрастающей на поле сельскохозяйственной культуры и/или ее составных частей. Информация о цвете произрастающей на поле сельскохозяйственной культуры позволяет отличать растения 3 сельскохозяйственной культуры от сорняков и/или растения 3 сельскохозяйственной культуры от грунта 4. Информация о цвете составных частей растений содержит, например, информацию о цвете стеблей и листьев, что позволяет отличать друг от друга стебли и листья, что выгодно, в частности, в ветреных условиях. Цвет внутри стебля или внутри растения 3 сельскохозяйственной культуры также можно регистрировать как часть цветовой информации, позволяющую судить о степени одревеснения стеблей и т.п.; эту информацию, в свою очередь, можно использовать для настройки, в частности, рабочей высоты сельскохозяйственных рабочих агрегатов, используемых, в частности, для уборки урожая.
Цветовая информация позволяет также судить о степени зрелости и/или содержании азота в растениях или грунте и передавать такую информацию в систему управления сельскохозяйственной машины 1 и/или сельскохозяйственного рабочего агрегата 2.
3D-камера 7 в данном случае и предпочтительно может переключаться между 3D-режимом и 20-режимом, причем 3D-камера 7 в 3D-режиме генерирует упомянутую 3D-информацию, а в 20-режиме генерирует упомянутую цветовую информацию.
Например, можно сначала собрать в 20-режиме цветовую информацию, позволяющую отличить растения 3 сельскохозяйственной культуры от грунта 4. Разумеется, в случае обильного произрастания сорняков между растениями 3 сельскохозяйственной культуры цветовая информация будет полезна лишь условно, поскольку, по существу, все кажется зеленым. В этом случае камера дополнительно переключается в 3D-режим, в котором можно собрать 3D-информацию, в частности, информацию о высоте отдельных растений, что позволяет отличать (более высокорослую) растения 3 сельскохозяйственной культуры от (низкорослых) сорняков или вредных растений.
Также можно сначала использовать 3D-режим, чтобы получить 3D-информацию о высоте растений 3 сельскохозяйственной культуры. При этом, однако, может случиться так, что, в частности, если растения 3 сельскохозяйственной культуры сравнительно недавно дали ростки, еще не достигшие достаточной высоты, неровности грунта не позволят достоверно отличить растения 3 сельскохозяйственной культуры от грунта 4, руководствуясь одной лишь 3D-информацией. В этом случае можно выполнить дополнительное различение (зеленых) растений 3 сельскохозяйственной культуры от (коричневого) грунта 4 в 20-режиме, посредством генерирования цветовой информации.
В частности, 20-режим позволяет получать моноскопические изображения, то есть изображения без 3D-информации, по одной из визуальных осей 10а, 10b и перерабатывать их в соответствующую цветовую информацию. В альтернативном варианте можно использовать стереоскопические пары изображений, полученные в 3D-режиме, путем обработки отдельных изображений, формирующих стереоскопические пары изображений, для последующего генерирования цветовой информации.
Дополнительно к описанной выше видеосистеме 6 с 3D-камерой 7 сельскохозяйственная рабочая машина 1 и/или сельскохозяйственный рабочий агрегат 2, каждый из них, может содержать дополнительные системы датчиков с известными датчиками, в частности датчиком скорости, датчиком рабочей высоты и/или датчиком угла поворота (не показаны на фигуре). Генерируемые данные датчиков, в том числе 3D-информация и, в частности, цветовая информация, могут впоследствии использоваться системой 16 помощи оператору сельскохозяйственной рабочей машины 1 для управления сельскохозяйственной рабочей машиной 1 и/или сельскохозяйственным рабочим агрегатом 2, как было описано выше.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 сельскохозяйственная рабочая машина
2 сельскохозяйственный рабочий агрегат
3 растения сельскохозяйственной культуры
4 грунт
5 ряды растений
6 видеосистема
7 3D-камера
8а, 8b объективы камеры
9 транспортное средство
10а, 10b визуальные оси
11а, 11b оптические центры
12 направление съемки
13 базисная линия
14 плоскость базисной линии
15 горизонтальная плоскость
16 система помощи оператору.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |
| РАСПОЗНАВАНИЕ СОРНЯКОВ В ЕСТЕСТВЕННОЙ СРЕДЕ | 2017 |
|
RU2735151C2 |
| РАСПОЗНАВАНИЕ СОРНЯКА В ЕСТЕСТВЕННОЙ СРЕДЕ | 2017 |
|
RU2764872C2 |
| СПОСОБ ВНЕСЕНИЯ СРЕДСТВА ДЛЯ ОПРЫСКИВАНИЯ НА ПОЛЕ | 2018 |
|
RU2767347C2 |
| МЕТОД ОБНАРУЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2559332C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ ИНДЕКСА ПЛОТНОСТИ РАСТИТЕЛЬНОСТИ | 2017 |
|
RU2662019C1 |
| Способ агрохимической обработки посевов | 2024 |
|
RU2838265C1 |
| Эндоскопическая видеосистема и способ её работы | 2020 |
|
RU2788812C2 |
| СПОСОБ И СИСТЕМА ОБРАБОТКИ ЗОН ПОСЕВА СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР НА ОСНОВАНИИ ДАННЫХ МОНИТОРИНГА | 2017 |
|
RU2668319C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ПОЛЕЙ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2215297C2 |
Изобретение относится к сельскому хозяйству. Сельскохозяйственная рабочая машина, в частности трактор, содержит сельскохозяйственный рабочий агрегат для обработки произрастающей на поле сельскохозяйственной культуры, содержащей множество растений сельскохозяйственной культуры, и видеосистему, содержащую 3D-камеру. Видеосистема выполнена с возможностью генерирования 3D-информации о произрастающей на поле сельскохозяйственной культуре с помощью 3D-камеры, осуществляющей съемку стереоскопических пар изображений по двум различным визуальным осям. Визуальные оси отходят от оптических центров 3D-камеры, соединенных друг с другом базисной линией, наклоненной относительно горизонтали. Обеспечивается повышение точности обработки посредством сельскохозяйственного рабочего агрегата при проезде произрастающей на поле сельскохозяйственной культуры. 10 з.п. ф-лы, 3 ил.
1. Сельскохозяйственная рабочая машина, в частности трактор с сельскохозяйственным рабочим агрегатом (2) для обработки произрастающей на поле сельскохозяйственной культуры, содержащей множество растений (3) сельскохозяйственной культуры, и с видеосистемой (6), содержащей 3D-камеру (7), причем видеосистема (6) выполнена с возможностью генерирования 3D-информации о произрастающей на поле сельскохозяйственной культуре с помощью 3D-камеры (7), осуществляющей съемку стереоскопических пар изображений по двум различным визуальным осям (10a, 10b), причем визуальные оси (10a, 10b) отходят от оптических центров (11a, 11b) 3D-камеры (7), соединенных друг с другом базисной линией (13), отличающаяся тем, что базисная линия (13) наклонена относительно горизонтали.
2. Машина по п. 1, отличающаяся тем, что базисная линия (13) проходит в плоскости (14), перпендикулярной горизонтальной плоскости (15).
3. Машина по п.п. 1 или 2, отличающаяся тем, что видеосистема (6) и/или 3D-камера (7) выполнена с возможностью поворота в плоскости (14), наклоненной относительно горизонтальной плоскости (15), в частности перпендикулярной к горизонтальной плоскости (15).
4. Машина по одному из предыдущих пунктов, отличающаяся тем, что 3D-камера (7) выполнена с возможностью регулировки по высоте.
5. Машина по одному из предыдущих пунктов, отличающаяся тем, что 3D-камера (7) содержит два объектива (8a, 8b), от каждого из которых отходит одна из двух визуальных осей (10a, 10b), или 3D-камера (7) содержит один объектив и оптическую насадку, формирующую стереоскопические пары изображений.
6. Машина по одному из предыдущих пунктов, отличающаяся тем, что 3D-информация, генерированная с помощью 3D-камеры (7), содержит, в частности, информацию о высоте растений (3) сельскохозяйственной культуры, о расстоянии между растениями (3) сельскохозяйственной культуры поперек направления движения, о расстоянии между растениями (3) сельскохозяйственной культуры по направлению движения и/или о составных частях растений (3) сельскохозяйственной культуры и/или информацию о высоте сорняков среди растений (3) сельскохозяйственной культуры, о расстоянии между сорняками среди растений (3) сельскохозяйственной культуры поперек направления движения, о расстоянии между сорняками среди растений (3) сельскохозяйственной культуры по направлению движения и/или о составных частях сорняков среди растений (3) сельскохозяйственной культуры.
7. Машина по одному из предыдущих пунктов, отличающаяся тем, что видеосистема (6) выполнена с возможностью генерирования с помощью 3D-камеры (7) цветовой информации о произрастающей на поле сельскохозяйственной культуре и/или цветовой информации о составных частях растений (3) сельскохозяйственной культуры, и/или о сорняках среди растений (3) сельскохозяйственной культуры.
8. Машина по одному из предыдущих пунктов, отличающаяся тем, что 3D-камера выполнена с возможностью переключения между 3D-режимом, в котором предусмотрено генерирование 3D-информации, и 2D-режимом, в котором предусмотрено генерирование цветовой информации.
9. Машина по п. 8, отличающаяся тем, что в 2D-режиме предусмотрено получение и обработка моноскопических отдельных изображений по одной из визуальных осей (10a, 10b) или обработка по отдельности каждого из изображений, формирующих стереоскопические пары изображений, чтобы из них сгенерировать цветовую информацию.
10. Машина по одному из предыдущих пунктов, отличающаяся тем, что дополнительно содержит по меньшей мере одну систему датчиков, содержащую по меньшей мере один датчик, генерирующий данные датчика, из группы датчиков, содержащей датчик скорости, датчик рабочей высоты или датчик угла поворота.
11. Машина по одному из предыдущих пунктов, отличающаяся тем, что содержит систему (16) помощи оператору, выполненную с возможностью управления сельскохозяйственной рабочей машиной (1) и/или сельскохозяйственным рабочим агрегатом (2) в зависимости от 3D-информации, цветовой информации и/или данных датчиков.
| US 2007050117 A1, 01.03.2007 | |||
| US 2011061762 A1, 17.03.2011 | |||
| US 2016309656 A1, 27.10.2016 | |||
| US 6118475 B1, 12.09.2000 | |||
| RU 2013157639 A, 27.06.2015 | |||
| JP 2010049443 A, 04.03.2010. |

