Изобретение относится к области обнаружения и распознавания малогабаритных беспилотных летательных аппаратов (МБЛА) и может быть использовано в военной технике.
Известны различные методы и технические решения для обнаружения летательных аппаратов с использованием способа кругового обзора матричным фотоприемным устройством и устройство для его осуществления (патент РФ №2445644), оптическим локатором кругового обзора (патент РФ №2352957) [1, 2]. Недостатками являются сложность конструкции, большие размеры, большая мощность двигателя для вращения камеры (кругового обзора) и соответственно ошибки в снятии результата.
Способ визуально-оптического контроля лазерного сканирования атмосферы (патент РФ №2489732). Недостатками являются активный метод обнаружения и минимальные турбулентные потоки из-за малых размеров и использования электродвигателей МБЛА [3].
Способ обнаружения объектов (патент РФ №2331084, прототип), заключающийся в селекции объекта на удаленном фоне, заключающийся в приеме и формировании двух изображений в двух пространственно разнесенных точках, а также одновременной регистрации сформированных цифровых изображений, отличающийся тем, что опорное и сравниваемое цифровые изображения регистрируют одномоментно для каждого фрагмента (пикселя) изображений двумя идентичными видеосистемами на основе многоэлементных высокоскоростных фотоприемников, например CMOS-матриц с объективами, которые предварительно фиксируют на небольшом по сравнению с удалением от предполагаемого места появления объекта расстоянии между собой параллельно друг другу в направлении на контролируемое пространство, а анализ изображений проводят при помощи определения величин смещения Δ характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного при максимально возможном их совпадении в направлении параллактического смещения и последующего выявления селектируемого и фоновых объектов из полученных смещений Δ и т.д. [4].
Известный способ имеет следующие недостатки: ограниченные функциональные возможности, связанные с невозможностью обнаружения МБЛА на 360° по горизонтали и на 180° по вертикали; ограниченную применимость видимым диапазоном работы видеокамер; невозможность использования в движении и создания достоверного трехмерного объемного изображения МБЛА и определения его дальнейшего направления движения.
Задачей, стоящей перед настоящим изобретением, является повышение возможности обнаружения МБЛА на 360° по горизонтали и на 180° по вертикали, параллельной работе в оптическом, звуковом и радиолокационном диапазоне электромагнитных волн, возможности размещения на подвижных объектах и создания достоверного трехмерного объемного изображения МБЛА и определения его дальнейшего направления движения.
Поставленная задача решается следующим образом.
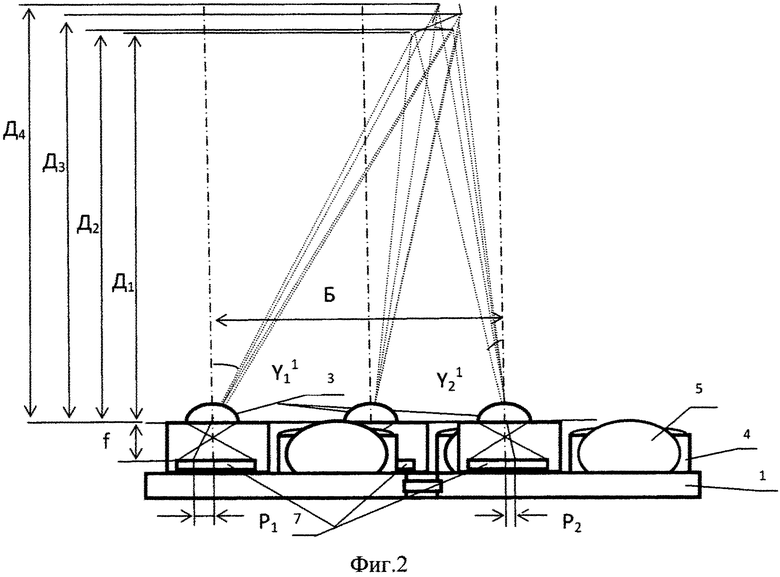
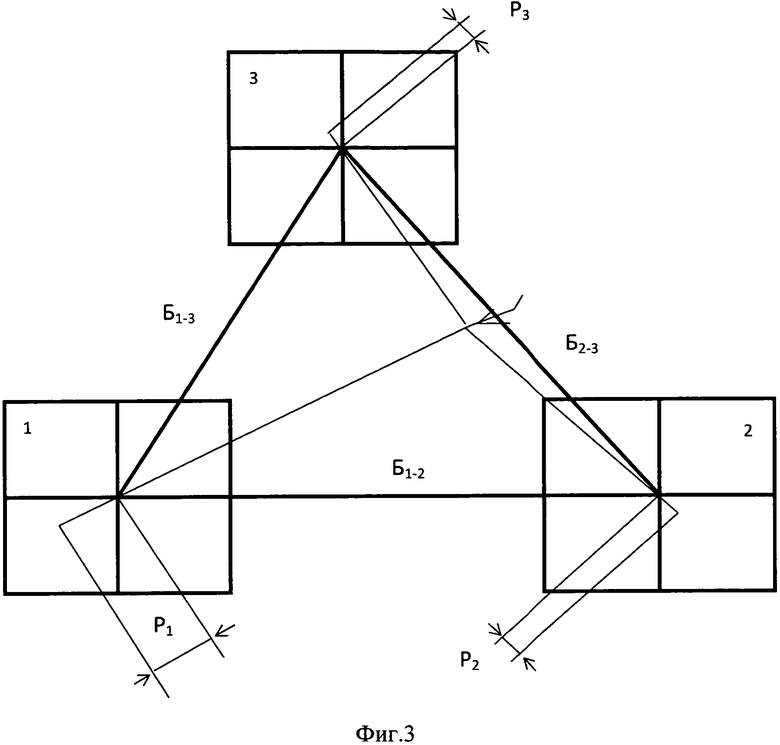
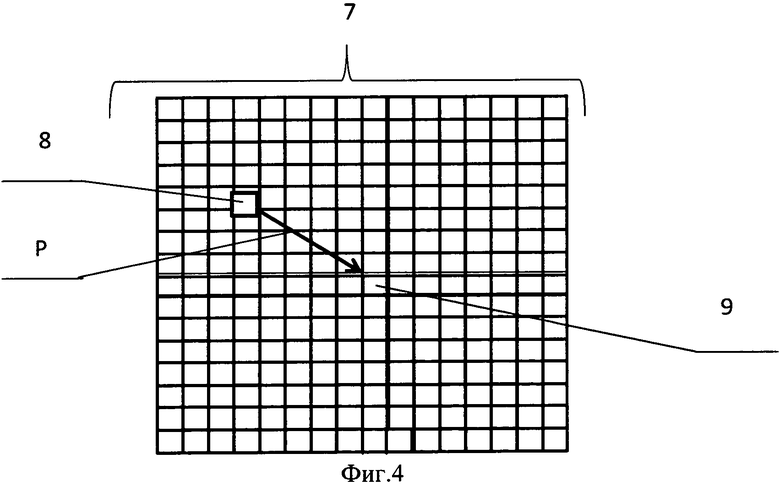
В методе обнаружения МБЛА, заключающемся в приеме и формировании трех и более изображений и сигналов в трех и более пространственно разнесенных точках на гиростабилизирующих платформах 1, связанных между собой рабочими базами 2, автоматически определяющими расстояния между собой и свои пространственные координаты, что позволяет разместить в любых удобных местах как на подвижном объекте, так и стационарном (фиг. 1). На каждой базе размещено по три датчика: датчик 3 (камера кругового обзора), работающий в оптическом диапазоне, датчик 4, работающий в акустическом диапазоне, и датчик 5, работающий в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн. Управление работой и обработкой полученной информации осуществляется ЭВМ 6 с элементами искусственного интеллекта, который сам выбирает наиболее эффективные датчики для более точного обнаружения и определения пространственных координат МБЛА в различных условиях. Одновременная регистрация кадров видеопоследовательности и определения геометрических и цветовых изменений сформированных изображений [5], согласно изобретению контрольное (наиболее ярко-выраженное) и сравниваемое цифровые изображения регистрируют одновременно для каждого фрагмента изображений тремя и более идентичными видеосистемами (датчиками) 3 на основе многоэлементных высокоскоростных фотоприемников 7 (фиг. 2). Анализ изображений проводится на ЭВМ 6 и определяются величины смещения P1, Р2, Р3 (фиг. 3) характерных фрагментов 8 (фиг. 4) сравниваемого изображения с аналогичными фрагментами контрольного при максимально возможном их совпадении в направлении параллактического смещения 9. Сущность измерения расстояния до МБЛА заключается в суммарном определении линейного параллакса, которое рассчитывается между двумя датчиками 1-2 (2-3, 1-3 или 1-i), одновременно по трем и более базам (фиг. 2) по формуле Д=Б/tgY (стереоскопический базовый метод измерения дальности).
Дальность Д1 до точки 1 МБЛА определяется по величине параллактического угла Y1 и по величине базы между датчиками Б1-2, определяемой суммой 


Для наиболее достоверного обнаружения МБЛА в условиях плохой видимости, когда оптический канал по выбору ЭВМ 6 не эффективно использовать (густой туман, полная темнота и т.д.), в процессе обнаружения используется звуковой и радиолокационный каналы. Датчики 4 и 5 размещены совместно на гиростабилизирующих платформах 1 и параллельно фиксируют появления объекта, и также с помощью ЭВМ 6 определяют пространственные координаты МБЛА в звуковом и радиолокационном диапазонах электромагнитных волн.
Источники информации
1. Броун Ф.М., Волков Р.И., Филатов М.И., Хазов A.M. Способ кругового обзора матричным фотоприемным устройством и устройство для его осуществления. - Патент на изобретение №2445644, 20.03.2012 г.
2. Архипов В.Г., Чжан Ю.В. Оптический локатор кругового обзора. - Патент на изобретение №2352957, 20.04.2009 г.
3. Попсуй С.П., Таурин В.Э., Швецов И.В., Швецова С.А. Способ визуально-оптического контроля лазерного сканирования атмосферы. - Патент на изобретение №2489732, 10.08.2013 г.
4. Подгорнов В.А. Способ обнаружения объектов. - Патент на изобретение №2331084, 10.08.2008 г.
5. Шишков С.В. Программа определения геометрических изменений на кадрах видеопоследовательности для обнаружения ДПЛА. / Музаи К., Устинов Е.М., Пархоменко А.В., Чернов Е.М., Щербаков А.С. /. Свидетельство о государственной регистрации программы для ЭВМ №2013611694, 31.01.13.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2574224C1 |
| МЕТОД ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2572924C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| КОМБИНИРОВАННЫЙ СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2824851C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОЙ СКРЫТНОСТИ ОБЪЕКТОВ ОТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2571534C2 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| ТЕПЛОВИЗИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТИПА "МУЛЬТИКОПТЕР" | 2020 |
|
RU2758881C1 |
| ТЕРМОБАРИЧЕСКИЙ СПОСОБ БОРЬБЫ С РОЕМ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2733600C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДВУХ ДИРЕКЦИОННЫХ УГЛОВ И ОДНОГО УГЛА МЕСТА | 2015 |
|
RU2601494C1 |
Изобретение относится к области обнаружения и распознавания малогабаритных беспилотных летательных аппаратов (МБЛА). В заявленном способе примененяются три и более изображений и сигналов в трех и более пространственно разнесенных точках на гиростабилизирующих платформах, связанных между собой рабочими базами. Рабочие базы автоматически определяют расстояния между собой и свои пространственные координаты, что позволяет разместить в любых удобных местах как на подвижном, так и стационарном объекте. На каждой базе размещено по три датчика, работающих в оптическом (камеры кругового обзора), акустическом и в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн. Управление работой трех каналов и обработкой полученной информации и сигналов осуществляет ЭВМ с элементами искусственного интеллекта, которая сама выбирает наиболее эффективные каналы для более точного обнаружения и определения пространственных координат МБЛА в различных условиях ведения наблюдения, что позволяет построить объемное 3D изображение МБЛА и сравнить с известными изображениями для их распознавания и определения средств борьбы с МБЛА. Технический результат - разработка метода обнаружения МБЛА в различных условиях ведения наблюдения с использованием датчиков, работающих в оптическом, звуковом и радиолокационных диапазонах электромагнитных волн. 4 ил.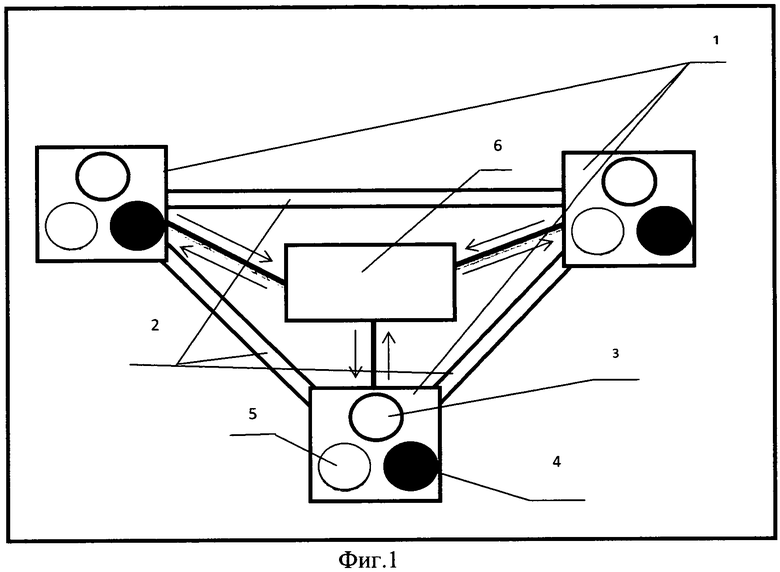
Метод обнаружения малогабаритных беспилотных летательных аппаратов (МБЛА), заключающийся в селекции объекта на удаленном фоне, в приеме и формировании изображений в пространственно разнесенных точках, а также одновременной регистрации сформированных цифровых изображений высокоскоростными фотоприемниками, анализ изображений проводят при помощи определения величин смещения характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного, отличающийся тем, что в приеме и формировании используются три и более изображений и сигналов в трех и более пространственно разнесенных точках на гиростабилизирующих платформах, связанных между собой рабочими базами, автоматически определяющими расстояния между собой и свои пространственные координаты, что позволяет разместить в любых удобных местах как на подвижном, так и стационарном объекте, на каждой базе размещено по три датчика, работающих в оптическом (камеры кругового обзора), акустическом и в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, управление работой трех каналов и обработкой полученной информации и сигналов осуществляет ЭВМ с элементами искусственного интеллекта, которая сама выбирает наиболее эффективные каналы для более точного обнаружения и определения пространственных координат МБЛА в различных условиях ведения наблюдения, что позволяет построить объемное 3D изображение МБЛА и сравнить с известными для их распознавания и определения средств борьбы с МБЛА.
| RU 137016 U1, 27.01.2014 | |||
| СПОСОБ СКОРОСТНОЙ ВОЗДУШНОЙ РАЗВЕДКИ | 2009 |
|
RU2395782C1 |
| МАЛОГАБАРИТНАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2473455C2 |
| US 6389333 B1, 14.05.2002 | |||

