ОБЛАСТЬ ТЕХНИКИ
Техническое решение относится к области сельского хозяйства, в частности к средствам и методам для управления робототехникой и аграрной техникой для обработки зон посева сельскохозяйственных культур на основании данных мониторинга.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны решения для получения информации о зонах посева с помощью беспилотных летательных аппаратов (БПЛА).
Из заявки US20160050840 (Climate Corp, 25.02.2016) известна система для получения комплексной информации по мониторингу зон посева, в частности полученная на основании индекса вегетативности (NDVI). На основании полученной информации определяется состояние участков зон посева и по полученным данным принимается решение о выполнении требуемых мероприятий.
Недостатком данного подхода является вовлечение человеческого фактора, который полностью контролирует выполнение необходимых работ, что приводит к более длительному процессу осуществления действий и снижению урожайности зон посева.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Существующая техническая проблема, решаемая с помощью заявленного решения, заключается в создании полностью автоматизированного комплекса выполнения сельскохозяйственных работ с помощью роботизированной техники, которая на основании обработки графических данных мониторинга будет выполнять требуемые операции по обработке растений.
Техническим результатом является повышение эффективности обработки растений в зоне посева сельскохозяйственных культур с помощью автоматизированной техники.
Заявленный результат достигается за счет способа обработки зон посева сельскохозяйственных культур на основании данных мониторинга, содержащий этапы, на которых:
осуществляют аэросъемку по меньшей мере одной зоны посева сельскохозяйственных культур, на основании которой получают набор изображений, характеризующих по меньшей мере один тип растительной культуры;
формируют NDVI карту на основании упомянутых данных съемки, отображающую состояние здоровья засеянных культур, причем упомянутое состояние определяется на основании сравнения показателей полученной NDVI карты с эталонными показателями здоровья, соответствующими одному или более типам культур;
определяют по меньшей мере одну зону обработки культур и вид обработки для каждой соответствующей зоны на основании упомянутых данных о состоянии здоровья культуры;
передают упомянутые данные о зоне обработки культур и соответствующем виде обработки на по меньшей мере одно автоматизированное средство обработки растений;
осуществляют обработку растений с помощью упомянутого автоматизированного средства.
В одном из частных вариантов реализации способа аэросъемка осуществляется с помощью БПЛА, самолета или аэростата.
В другом частном варианте реализации способа дополнительно определяют засеянную площадь по меньшей мере одной культуры по карте NDVI.
В другом частном варианте реализации способа дополнительно определяют площадь засеянной культуры с каждым типом состояния здоровья.
В другом частном варианте реализации способа типы состояния здоровья включают в себя по меньшей мере: здоровые растения, больные растения без возможности излечения, погибшие растения, больные растения с возможностью излечения.
В другом частном варианте реализации способа воздушная съемка осуществляется с помощью по меньшей мере одной высокочастотной камеры.
В другом частном варианте реализации способа съемка выполняется на высоте, не превышающей 25 м ±10%.
В другом частном варианте реализации способа вид обработки растений выбирается из группы: орошение, внесение средств защиты растений (СРЗ), внесение удобрений или уборку культур.
В другом частном варианте реализации способа построение карты NDVI выполняется дополнительно на основании заданного масштаба усреднения.
В другом частном варианте реализации способа формируют план обработки растений, включающий маршрут перемещения автоматизированного средства обработки растений.
В другом частном варианте реализации способа план дополнительно включает в себя данные о количестве и марке вносимых СЗР и/или удобрений, определяемых на основании обработки информации о типе заболеваний растений и/или их состоянии.
В другом частном варианте реализации способа автоматизированное средство обработки растений представляет собой БПЛА, аэростат или роботизированное устройство.
В другом частном варианте реализации способа дополнительно определяют количество растений на основании карты NDVI.
В другом частном варианте реализации способа на основании изображений аэросъемки дополнительно определяют тип болезни растительной культуры с помощью сравнения полученных изображений с изображениями базой данных заболеваний растений.
дополнительно определяют на основании данных аэросъемки глубину гумусового слоя.
В другом частном варианте реализации способа дополнительно по полученным изображениям аэросъемки определяют содержание азота в почве.
В другом частном варианте реализации способа изображения аэросъемки привязаны к географическим координатам.
Заявленное решение во втором предпочтительном варианте осуществления представляет систему для обработки зон посева сельскохозяйственных культур на основании данных мониторинга, которая содержит:
по меньшей мере одно средство для осуществления аэросъемки зон посева сельскохозяйственных культур, выполненное с возможностью получения изображений упомянутых культур;
по меньшей мере одно средство обработки данных, выполненное с возможностью:
на основании полученных изображений аэросъемки определять тип по меньшей мере одной растительной культуры;
формировать NDVI карту на основании упомянутых данных съемки, отображающую состояние здоровья засеянных культур, на основании сравнения показателей полученной NDVI карты с эталонными показателями здоровья, соответствующими одному или более типам культур;
определять по меньшей мере одну зону обработки культур и вид обработки для каждой соответствующей зоны на основании упомянутых данных о состоянии здоровья культуры;
передавать упомянутые данные о зоне обработки культур и соответствующем виде обработки на по меньшей мере одно автоматизированное средство обработки растений, выполненное с возможностью обработки растений на основании полученных данных.
В одном из частных вариантов реализации системы воздушная съемка осуществляется с помощью БПЛА, самолета или аэростата.
В другом частном варианте реализации системы средство обработки данных выбирается из группы компьютер, смартфон, планшет, ноутбук, сервер, серверный кластер или мейнфрейм.
В другом частном варианте реализации системы средство обработки данных представляет собой процессор или микроконтроллер, установленный на борту средства для осуществления аэросъемки.
В другом частном варианте реализации системы автоматизированное средство обработки растений представляет собой БПЛА, аэростат или роботизированное устройство.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
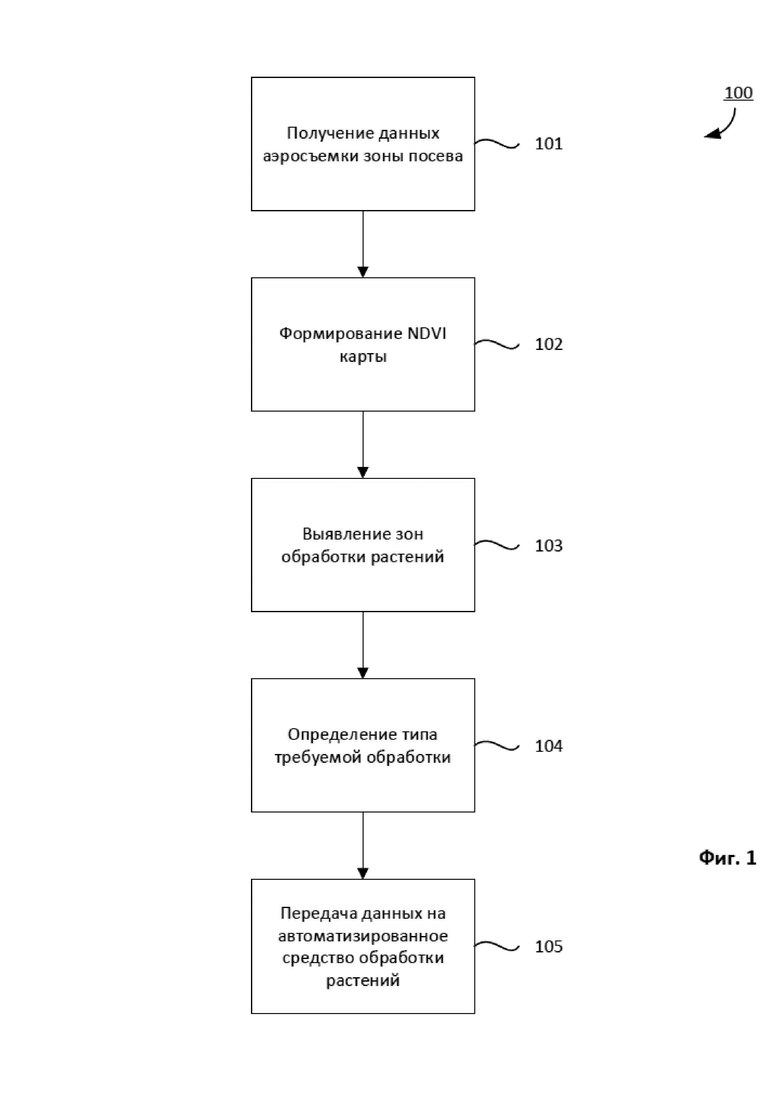
Фиг. 1 иллюстрирует блок-схему реализации заявленного способа.
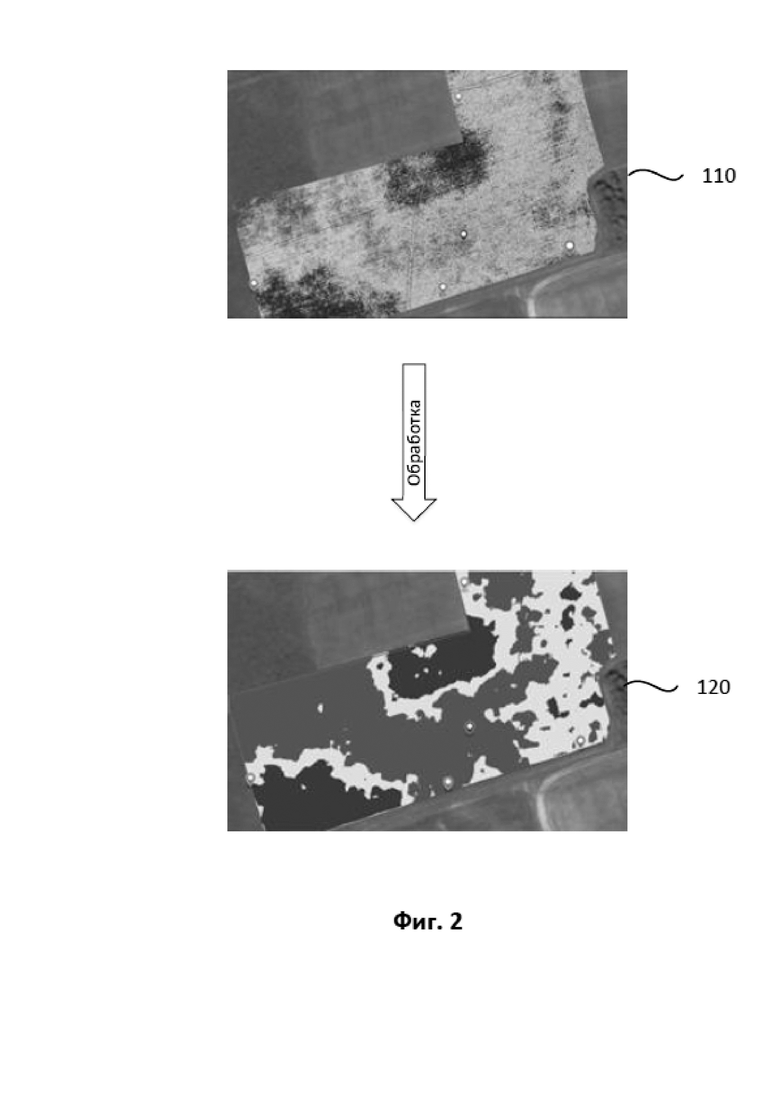
Фиг. 2 иллюстрирует процесс обработки данных для построения NDVI карты.
Фиг. 3 иллюстрирует пример распределения зон обработок растений.
Фиг. 4 иллюстрирует общий вид заявленной системы.
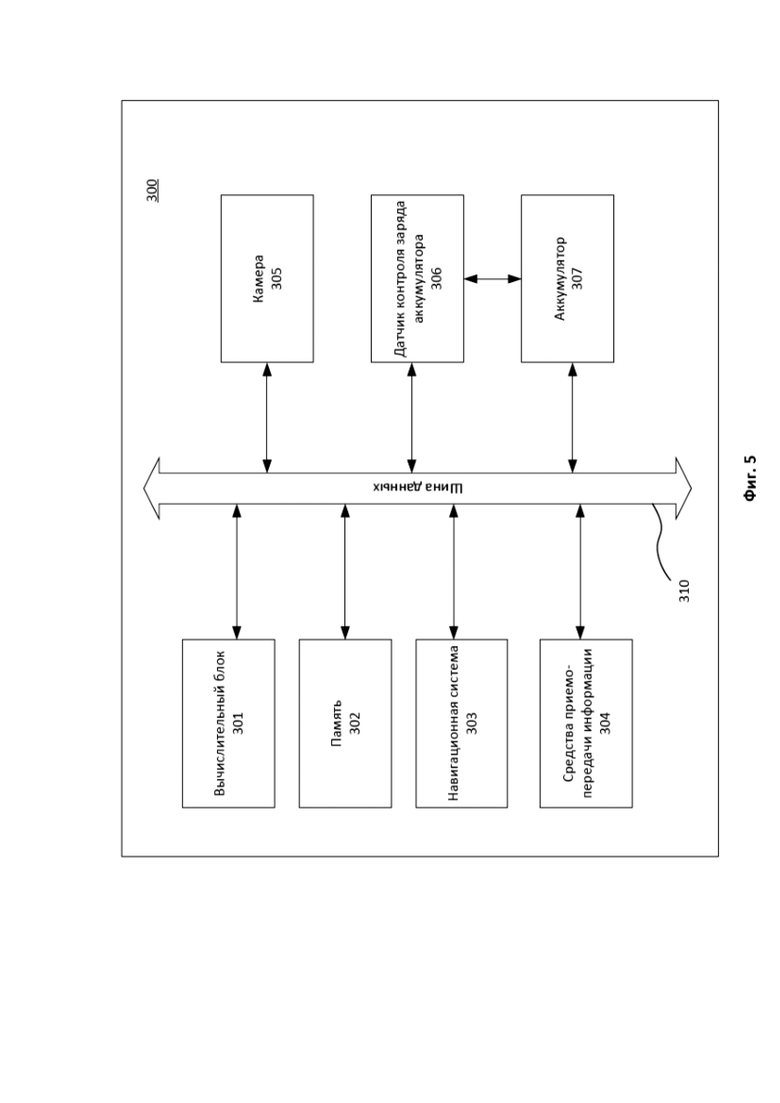
Фиг. 5 иллюстрирует общую схему средства осуществления аэросъемки.
Фиг. 6 иллюстрирует общую схему вычислительного устройства для обработки данных мониторинга.
Фиг. 7 иллюстрирует общую схему автоматизированного устройства обработки растений.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 представлена последовательность этапов заявленного способа (100). На первом этапе (101) осуществляется аэросъемка зоны посева сельскохозяйственных культур. По полученным снимкам в RGB спектре формируется NDVI карта (102) на основании разницы значений коэффициентов отражения в ближнем инфракрасном и красном спектре получается.
При построении NDVI карты учитывается тип засеянной культуры, поскольку для каждой культуры имеется эталонная спектральная градация, в диапазонах которой определяется состояние растений, например, погибшие, больные и здоровые растения.
Как представлено на Фиг. 2 на основании полученной NDVI карты (120) по данным аэросъемки (110) автоматически рассчитывается абсолютное значение площади каждой цветовой области, отражающей состояние засеянной культуры, а также происходит расчет относительной площади каждой цветовой области в процентах. Пример приведен в Таблице 1.
Таблица 1
Как представлено на Фиг. 3 на этапе (103) на основании информации по карте NDVI определяются зоны (201)-(203) территории посева (200), которые соответствуют тому или иному состоянию растений.
Для каждой зоны определяется соответствующий тип обработки (104) в зависимости от состояния растений, например, полив, опрыскивание, уборка, удобрение и т.п.
После определения зон (103) и типа требуемой для каждой зоны обработки (104) данная информация передается в автоматизированное средство обработки растений (105), которое осуществляет необходимые действия в автоматизированном режиме в заданной зоне (201)-(203) территории посева культур (200).
На основании относительного показателя по карте NDVI (120) принимает решение о целесообразности внесения средств защиты растений (СЗР), удобрений, выполнения полива, уборки культур и т.п.
Полученная NDVI карта за счет синхронизации с географическими координатами может накладываться на различные цифровые карты, например, Google Maps, Yandex карты, Garmin, Navteq и т.п. Использование цифровых карт позволяет более точно определить местоположение оператора (агронома) в области обработки растений (200) с помощью различных устройств, например, планшета, мобильного телефона или ноутбука, за счет обеспечения отображения местоположения по GPS координатам на NDVI карте (120) (как в навигаторе).
К полученной NDVI карте (120) может быть применен фильтр для дискретизации цветового диапазона исходной карты (110) до заданного количества цветов, который преобразует множество оттенков карты (110) из формата 32 бита на пиксель в заранее заданную индексированную палитру на 3-5-10 и более цветов. Для каждого цвета в палитре назначается условный идентификатор, который отображает соответствие реальному элементу на поле – например – здоровые растения, больные с возможным излечением, больные без излечения, погибшие, и т.п. Зная масштабный коэффициент аэросъемки по полученной карте (120) возможно рассчитать площади различных участков растений (201)-(203) в метрах с высокой точностью.
На Фиг. 4 приведена общая схема заявленной системы, выполняющей заявленный способ (100). Аэросъемка может осуществляться с помощью широкого спектра специально предназначенных устройств (камер), установленных на борту летательных аппаратов (300), в частности может применяться самолет, БПЛА или аэростат. В качестве камеры могут использоваться различные типы мультиспектральных камер, например, марки Tetracam, MicaSense, АСТРОН и т.п.
Полученные данные (RGB фотографии) с одного или более аппарата (300) могут передаваться на устройство обработки информации (400) для осуществления построения карты NDVI и дальнейшей обработки данных для определения зон обработки растений и генерированию команд для автоматизированных средств (500) обработки растений.
Обработка полученных снимков может также осуществляться на борту средства (300) осуществляющего аэросъемку.
На Фиг. 5 представлен общая схема средства для осуществления аэросъемки (300). В общем случае средство (300) в независимости от типа его исполнения (БПЛА, самолет или аэростат) содержит объединенные общей шиной данных (310) аппаратные средства, такие как: вычислительный блок (301), память (302), навигационную системы (303), средство приемо-передачи информации (304), камеру (305), аккумулятор (307). Дополнительно может также предусматриваться датчик контроля заряда аккумулятора (306), в частности для БПЛА.
Вычислительный блок (301) может выполняться в виде одного или более процессоров, микроконтроллеров или их сочетаний. Блок (301) осуществляет обработку данных, получаемых с камеры (305), а также привязку географических координат к полученным снимкам с камеры (305) в связке с навигационной системой (303).
Вычислительный блок (301) также может осуществлять полное управление средством для аэросъемки (300) на основании полученной из внешних источников информации о маршруте перемещения и/или зоны съемки. Это необходимо для автоматизированных средств выполнения съемки (300), например, БПЛА, который в автоматическом режиме осуществляет облет и получение необходимой информации о зоне посева культур (200).
Память (302) выбирается из различного спектра устройств, например, ОЗУ, ПЗУ, флэш-память, HDD, SSD или их сочетания. Могут применяться различные типы и модули памяти, в зависимости от необходимого технического воплощения средства для аэросъемки (300).
Навигационная система (303) представляет собой приемник спутниковых координат, в частности таких система как GPS, ГЛОНАСС, Galileo, BeiDou. Может применяться комбинированный чип для приемника, осуществляющий прием сигналов сразу нескольких навигационных систем (multi-GNSS чипы марки Furuno).
Средства приемо-передачи информации (304) выбираются из таких устройств, как: Wi-Fi модуль, Bleutooth модуль, BLE модуль, NFC модуль, RF модуль, модуль спутниковой связи и т.п. С помощь указанных средств (304) может осуществляться процесс дистанционного управления средством (300), а также прием и передача различных данных, например, полученных изображений, плана полета, информации о зонах мониторинга и т.п.
Мониторинг зон посева (200) осуществляется с помощью камеры (305), в частности одной или более мультиспектральной камеры. Данные, полученные с камеры, могут передаваться в память (302) для их хранения и/или дальнейшей обработки для построения NDVI (120) карты. Изображения (110), получаемые с камеры (305), могут передаваться по беспроводным каналам передачи данных на удаленный сервер или внешнее устройство обработки информации (400), например, компьютер агронома.
Питание узлов и аппаратных модулей средства для аэросъемки (300) осуществляется с помощью аккумулятора (307). В качестве аккумулятора могут применяться различные типы батарей, например, Li-Pol, LI+, Li-ion и т.п. Также дополнительно может применяться дополнительные источники питания в виде аккумулятора на солнечных батареях.
Дополнительно может устанавливаться датчик контроля заряда аккумулятора (306), который по достижению порогового значения заряда сообщит вычислительному блоку (301) или на удаленное устройство управления средством (300), о необходимости заряда аккумулятора. БПЛА, оборудованные датчиком (306), при осуществлении мониторинга в автоматизированном режиме возвращаются в заданное место для зарядки или замены аккумулятора (307).
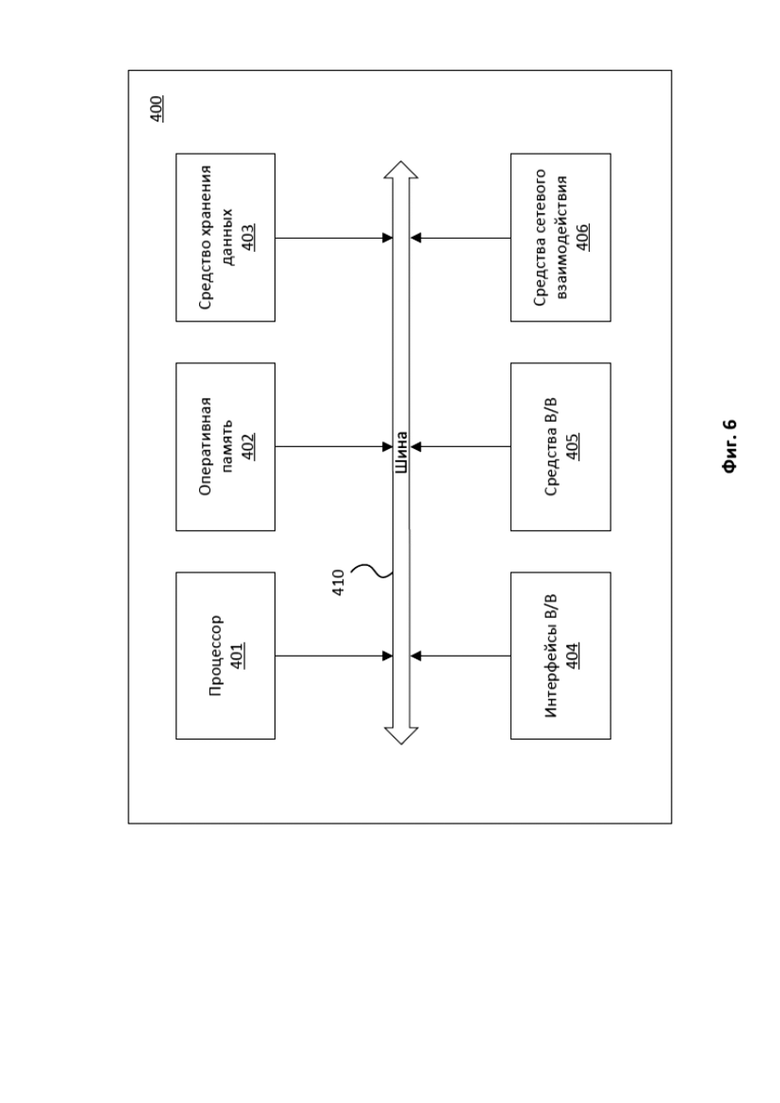
На Фиг. 6 представлен общий вид устройства обработки информации (400). Данное устройство применяется для обработки данных полученных от средств мониторинга (300) зон посевов, в частности изображений (110) с камеры (305).
Устройство (400) в общем случае выполняется в виде программно-аппаратного средства, такого как, например, компьютер, ноутбук, планшет, смартфон или сервера для обработки данных и передачи информации посредством сети «Интернет».
Устройство (400) содержит объединенные общей шиной данных (410) один или более процессоров (401), ОЗУ (402), средство хранения данных (403), интерфейсы ввода/вывода (404), средства В/В (405) и средства сетевого взаимодействия (406).
Процессор (401) выполняет необходимую обработку информации для получения по меньшей мере NDVI карты (120), определения состояния растений в зоне мониторинга (200), а также определение и генерирование команд для осуществления обработки растений в заданных зонах (201)-(203) с помощью автоматизированных средств (500).
ОЗУ (402) представляет собой стандартное средство, применяемое в вышеуказанных технических воплощениях устройства (400).
Средство хранения данных (403) или ПЗУ может выбираться из группы: HDD, SSD, флэш-память или их сочетания.
Интерфейсы В/В (404) могут представлять собой: USB, USB-C, PS/2, LPT, COM, RJ-45, Lightning, FireWire, IrDa и т.п. Интерфейсы (404) представляют собой стандартные аппаратные средства, обеспечивающие соединение с устройством (400) и обмен с ним различного рода информацией.
Устройства В/В (405) могут выбираться из группы: дисплей, сенсорный дисплей, динамики, вибромотор, световая индикация, клавиатура, тач-пад, джойстик и т.п. Устройства (405) обеспечивают взаимодействие пользователя с устройством (400).
В качестве средств сетевого взаимодействия (406) могут использоваться такие средства, как: Ethernet карта, Wi-Fi модуль, GSM-модуль, NFC модуль, Bluetooth, BLE, модуль спутниковой связи и т.п.
На основании сшитых RGB фотографий, полученных с помощью частотной съёмки на камеру высокого разрешения (мультиспектральную камеру) (305) на высоте до 25 метров (± 10%) от высоты растений в зоне (200), агроном выбирает масштаб усреднения (0,25 м, 1 м, 5 м, 10 м, 25 м) с помощью устройства (400).
На основании видеообраза растений каждого вида самообучающийся алгоритм, реализуемый с помощью процессора (401) распознаёт количество растений и строит NDVI карту количества растений, разбитых по квадратам усреднения с заданным ранее масштабом (120). Дополнительно участки карты могут быть размечены на раздельные площади с помощью инструментов создания и редактирования полигонов и контуров. К полученным площадям может быть применен инструмент прямоугольного усреднения показателей, который разбивает их на множество прямоугольных фрагментов с заранее заданным коэффициентом усреднения. Такие участки карты могут позднее обсчитываться исходя из количества и типов полученных фрагментов.
Определенные области на карте NDVI (120) могут использоваться как зоны обработки растений (201)-(203), в частности контуры зон для внесения удобрений, планирования доли внесения СЗР, полива растений, расчистки области от погибших растений и т.п.
Полученные карты (120) могут загружаются в средства управления сложной сельхоз техникой. В таком случае обработка и внесение будет происходить в автоматическом режиме. При невозможности использовать такую технику, существует возможность загрузки карт на портативное мобильное устройство.
Для современных автоматизированных устройств обработки растений (500), например, аграрных комбайнов, оснащенных системами типа Trimble, предусмотрена возможность интеграции в навигационную систему файла плана работ на основании полученных карт NDVI (120). Его использование позволяет во время выполнения обработки области посева (200) регулировать подачу удобрений в различных частях обрабатываемого поля или осуществлять заданный тип обработки растений в зависимости от их состояния.
Поле определения количества растений в каждой зоне области посева (200), на основании практической базы средней урожайности на одно растение в данном регионе может высчитываться планируемый урожай. Строится карта планируемой урожайности. Все данные можно выгрузить для дальнейшей обработки.
При формировании данных по пространственной однородности зон обработки (201)-(203) можно рассчитать общую урожайность упомянутых зон в прогрессии с учетом погибающих участков, участков с низкой скоростью созревания, которым требуется дополнительная обработка и других факторов, прямо или косвенно влияющих на итоговую урожайность. Возможно построение линейной или не линейной зависимости между объемом урожая и различными «улучшающими» или «ухудшающими» факторами, такими как температура, влажность, удобренность почвы, болезнями и заводнениями на поле. Эта зависимость может быть представлена в графическом виде, который визуально покажет объемы урожайности на временной шкале в зависимости от множества «влияющих» факторов. По данной информации получается возможным точно определить площадь зоны посева той или иной культуры, а также площадь зоны состояния культуры (здоровые, больные растения и т.п.).
Обработка растений может осуществляться следующим образом. На основании обработанной информации с помощью устройства (400) выбирается тип культуры в зоне посева (200). В ответ на сделанный выбор с помощью процессора (401) формируется команда управления, содержащая информацию о маршруте и типе необходимой обработке культуры, которая передается на автоматизированное устройство (500), например, БПЛА по маршруту, как было описано ранее. Выбор зоны обработки может также быть выбран с помощью графического интерфейса пользователя (GUI), отображаемого устройством (400), например, с помощью активации в интерфейсе зоны обработки растений (201)-(203), отображаемой на экране (406), что в ответ позволяет генерировать данные для передачи их в устройство (500).
Также, на основании сшитых RGB фотографий (110), полученных с помощью аэросъемки на камеру (305) на высоте от 2 до 10 метров от высоты растений, с помощью анализа видеообраза листьев растений каждого вида самообучающийся алгоритм, реализуемый вычислительный устройством (400), распознаёт область, топологию и цвет поражения листа, сравнивает с экспериментальной базой болезней по данной культуре и индексу ЭПВ (Экономический порог вредоносности). В ходе работы алгоритма с помощью произведенный вычислений процессора (401), для каждой области поражения зоны мониторинга (200) определяется диагноз болезни, определяет показатель ЭПВ и сопоставляет его со справочником. В общем случае под справочником понимается информационная среда, например, база данных, в которой содержится информация, такая как: рекомендации по обработке растений, глоссарий, список болезней с их описанием и рекомендации по работе с ними и т.п.
Также, с помощью обработки данных аэросъемки (110) возможно определить глубину гумусового слоя. Для этого с помощью GUI приложения устройства (400) осуществляется выбор типа культуры и происходит интерпретация сшитой RGB картинки по корреляционной зависимости между содержанием хлорофила в листе (зеленостью листа) и мощностью гумусового слоя в конкретном регионе. В результате с помощью построенной карты рассчитывается мощность гумусового слоя для различных типов усреднения (пространственной однородности участков карты).
Дополнительно может определяться содержание азота в почве. Агроном делает в начале сезона пробный отбор почвы и сохраняет результат в базе данных или ином средстве хранения данных. С помощью устройства (400) выьирается тип культуры и происходит интерпретация сшитой RGB картинки в зеленом диапазоне от 540 до 570 нм (вместо красного спектра) по корреляционной зависимости между содержанием хлорофила в листе и содержанием азота. В результате получается карта области мониторинга (200) с распределенным содержанием азота в ее областях.
Также, с помощью полученных изображений возможно определить места скопления влаги. Изображения, полученные на этапе посадки растений с помощью аэросъемки, интерпретируются в 3D модель, которая показывает затопления при различном уровне осадок. Трехмерная модель поверхности посадки моделируется на основании карты высот местности, полученной из геодезических карт местности либо созданной автоматически на основании сшитых карт RGB. Для уточнения высоты над уровнем моря могут быть использованы gprs координаты местности съемки со специального прибора. Построенная 3d модель позволит визуально оценить места скопления и объемы осадков в заниженных фрагментах карты.
С помощью обработки данных аэросъемки устройством (400) возможно также осуществить кадастровую оценку земли (площадь). Сшитые картинки ортофотопланов разбиваются по землям, где подсчитывается их площадь. Составляется кадастровый банк.
Также, изображения, полученные на этапе посадки растений интерпретируются в 3D модель по которой подсчитываются общая площадь объёмной фигуры. Автоматически выбираются при этом границы полей. И составляется автоматически кадастр земель.
При обработке данных аэросъемки, алгоритм, исполняемый процессором (401), на полученных картах определяет зигзагообразные полосы, которые отображают нарушение тех процесса. Осуществляется подсчет пути и площади причинения ущерба в зоне посева.
На основании карты NDVI (120) дополнительно может определяться резко выпадающая по цвету полоса, что фиксируется алгоритмом как зона неправильного внесения СЗР (отсутствие внесения или двойное внесение). С помощью GUI данная полоса подсвечивается на карте (120).
Алгоритм работы, реализуемый устройством (400), автоматически соотносит данные по рельефу, по содержанию азота, по внесению СЗР, по глубине гумусового слоя с картой урожайности и NDVI (120) и смотрит корреляции между значениями, чтобы точно определить причины заболеваний той или иной засеянной культуры в зоне (200). Интерпретация результатов сравнения карт и оценки причин болезни может быть выдана в виде набора эвристик. Например – В регионе содержание азота ниже среднего, гумусовый слой истощен, СЗР проводилось на 30 процентов, что могло вызвать в этом квадрате заболевание N.
По результатам проведенного анализа состояния растений на полях или земельных участках алгоритм ПО, реализуемый устройством (400) способен определять количество и тип применения необходимых удобрений в зависимости от засеянных культур в зоне мониторинга (200). На основании полученных данных возможно определение конкретной марки удобрений с помощью сравнения с базой данных продукции по ключевым параметрам. При работе алгоритма, в случае обнаружения той или иной болезни, формируется сообщение по рекомендации в определенном объеме обработать зону заболевания растений химическим удобрением предложенной марки. При этом осуществляется расчет количества удобрений, подлежащих внесению. С помощью связи с сервисом заказа удобрений поставщика продукции посредством сети Интернет, GUI устройства (400) может реализовывать функцию формирования автоматизированной услуги по заказу необходимой продукции.
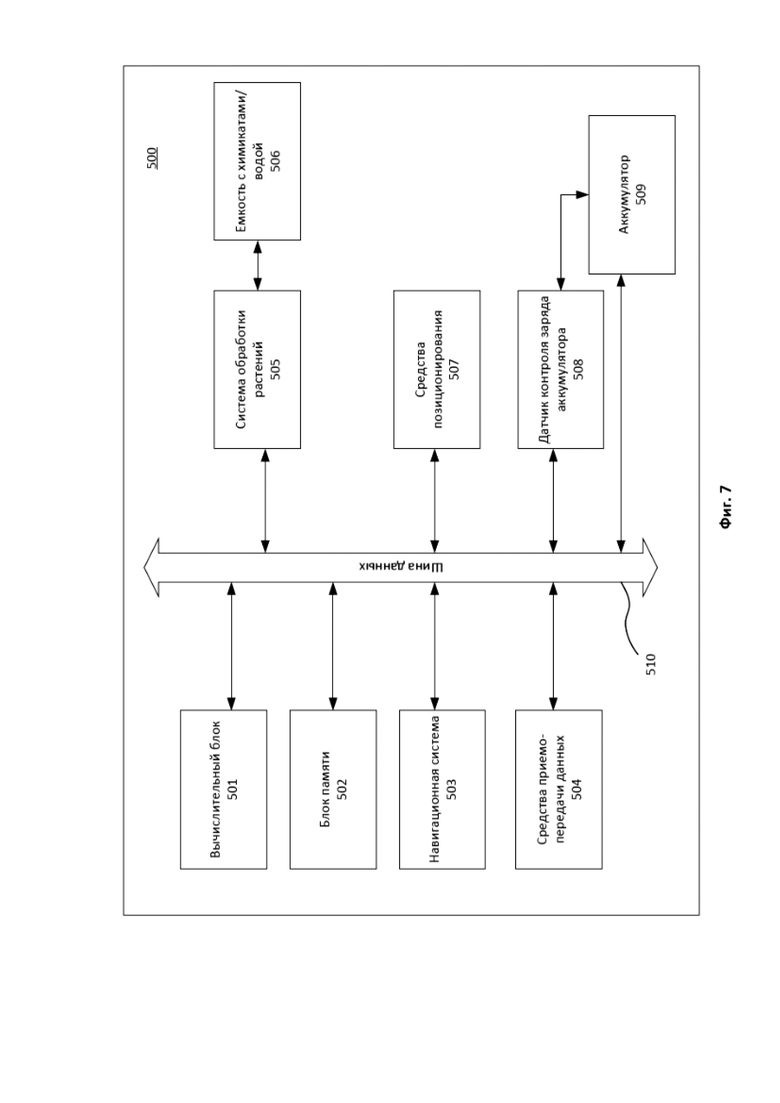
Обработка зоны посева (200) осуществляется с помощью различных автоматизированных технических или роботизированных средств (500), например, комбайнов, БПЛА. Как показано на Фиг. 7, в общем виде такие средства (500) содержат объединенные общей шиной данных (510) вычислительный блок (501), блок памяти (502), навигационную систему (503), средство приемо-передачи данных (504), система обработки растений (505) и аккумулятор (509).
Дополнительно, в зависимости от исполнения средства (500), дополнительно могут устанавливаться средства позиционирования (506), емкость с химикатами, водой или специализированным раствором (507) и датчик контроля заряда аккумулятора (508).
Вычислительный блок (501) выполняется на базе процессора, контроллера или микроконтроллера и осуществляет обработку данных поступающих от устройства (400), в частности ведение устройства (500) по заданному маршруту на основании географических координат и активацию команд на выполнение обработки растений.
Маршрут может формироваться исходя из желаемой высоты, угла обзора мультиспектральной камеры и зоной перекрытия таким образом, чтобы покрыть весь заданный участок обработки растений. С помощью обработки информации пользовательского ввода сектора обработки растений, например, с помощью выбора необходимого участка на Google картах (либо через аналогичную систему) из расчетной площади одного снимка строится кратчайший маршрут покрытия всей выделенной области.
Блок памяти (502) представляет собой ОЗУ, ПЗУ или их сочетания. ПЗУ может представлять собой любой тип средства хранения данных, аналогичных памяти (403).
Навигационная система (503) представляет собой приемник географических координат, аналогичный приемнику (303).
В качестве средств приемо-передачи информации (504) могут применяться различные модули, аналогичные средству (304). С помощью упомянутых средств (504) выполняется обмен данными для управления средством обработки растений (500).
В качестве системы обработки растений (505) могут использоваться различные типы оросительных систем, систем опрыскивания, генераторы холодного/горячего тумана, устройства для сбора урожая, уборки растений, систем для пахоты, систем для культивации, систем для боронования, систем подвоза семян или удобрений, систем посева с внесением удобрений, систем внесения удобрений (подкормки), систем подвоза воды и т.п.
На средство (500) устанавливается емкость с жидкостью (507), связанная с системой обработки растений (505) для внесения удобрений/химикатов/полива растений.
В качестве дополнительных средств позиционирования (506) средств обработки (500) могут применяться такие устройства, как: сонары, LIDAR и камеры; что обеспечивает дополнительную точность при перемещении средств обработки растений (500) в зоне работ.
Дополнительно на средства (500) могут устанавливаться сенсоры обмена информацией со специализированными интеллектуальными москитными ловушками, которые расставлены/разбросаны человеком/коптером в области проведения работ. Они позволяют собирать информацию о скорости, времени и степени заполнения этих ловушек на расстоянии. Данные с каждой расставленной ловушки интегрируются в карту местности и доступны для дальнейшей обработки, например, для построения карты обитания и скопления москитов.
Представленное раскрытие сущности заявленного решения относится к описанию предпочтительных вариантов его реализации и не должно трактоваться как ограничивающее иные, частные примеры осуществления, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалиста в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ агрохимической обработки посевов | 2024 |
|
RU2838265C1 |
| МЕТОДИКА ДИСТАНЦИОННОЙ РЕКОГНОСЦИРОВОЧНОЙ ДИАГНОСТИКИ ОБЕСПЕЧЕНИЯ РАСТЕНИЙ АЗОТОМ (С ПОМОЩЬЮ МУЛЬТИСПЕКТРАЛЬНОЙ КАМЕРЫ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ) | 2018 |
|
RU2693255C1 |
| Способ определения доз минеральных удобрений на основании данных мониторинга и функциональной диагностики посевов | 2022 |
|
RU2786238C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ ИНДЕКСА ПЛОТНОСТИ РАСТИТЕЛЬНОСТИ | 2017 |
|
RU2662019C1 |
| Способ предуборочной десикации посевов сельскохозяйственных культур переменной нормой внутри одного поля | 2019 |
|
RU2717933C1 |
| Способ генерации карт деградации почвенного покрова | 2021 |
|
RU2769575C1 |
| СПОСОБ ФОТОМЕТРИЧЕСКОЙ ДИАГНОСТИКИ АЗОТНОГО ПИТАНИЯ РАСТЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БПЛА) | 2017 |
|
RU2661458C1 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |

Группа изобретений относится к области сельского хозяйства, в частности к средствам и методам для управления робототехникой и аграрной техникой для обработки зон посева сельскохозяйственных культур на основании данных мониторинга. В способе осуществляют аэросъемку по меньшей мере одной зоны посева сельскохозяйственных культур, на основании которой получают набор изображений, характеризующих по меньшей мере один тип растительной культуры. Формируют NDVI карту на основании упомянутых данных съемки, отображающую состояние здоровья засеянных культур, причем упомянутое состояние определяется на основании сравнения показателей полученной NDVI карты с эталонными показателями здоровья, соответствующими одному или более типам культур. Определяют по меньшей мере одну зону обработки культур, вид обработки и план обработки растений, включающий маршрут перемещения автоматизированного средства обработки растений для каждой соответствующей зоны на основании упомянутых данных о состоянии здоровья культуры. Передают упомянутые данные о зоне обработки культур и соответствующем виде обработки на по меньшей мере одно автоматизированное средство обработки растений. Осуществляют определенный вид обработки растений в упомянутой зоне с помощью упомянутого автоматизированного средства. Система содержит по меньшей мере одно средство для осуществления аэросъемки зон посева сельскохозяйственных культур, выполненное с возможностью получения изображений упомянутых культур, по меньшей мере одно средство обработки данных, выполненное с возможностью: на основании полученных изображений аэросъемки определять тип по меньшей мере одной растительной культуры; формировать NDVI карту на основании упомянутых данных съемки, отображающую состояние здоровья засеянных культур, на основании сравнения показателей полученной NDVI карты с эталонными показателями здоровья, соответствующими одному или более типам культур; определять по меньшей мере одну зону обработки культур, вид обработки и план обработки растений, включающий маршрут перемещения автоматизированного средства обработки растений, для каждой соответствующей зоны на основании упомянутых данных о состоянии здоровья культуры; передавать упомянутые данные о зоне обработки культур и соответствующем виде обработки на по меньшей мере одно автоматизированное средство обработки растений, выполненное с возможностью обработки растений на основании полученных данных. Изобретения позволяют повысить эффективность обработки растений в зоне посева сельскохозяйственных культур с помощью автоматизированной техники. 2 н. и 19 з.п. ф-лы, 7 ил., 1 табл.
1. Способ обработки зон посева сельскохозяйственных культур на основании данных мониторинга, содержащий этапы, на которых:
- осуществляют аэросъемку по меньшей мере одной зоны посева сельскохозяйственных культур, на основании которой получают набор изображений, характеризующих по меньшей мере один тип растительной культуры;
- формируют NDVI карту на основании упомянутых данных съемки, отображающую состояние здоровья засеянных культур, причем упомянутое состояние определяется на основании сравнения показателей полученной NDVI карты с эталонными показателями здоровья, соответствующими одному или более типам культур;
- определяют по меньшей мере одну зону обработки культур, вид обработки и план обработки растений, включающий маршрут перемещения автоматизированного средства обработки растений, для каждой соответствующей зоны на основании упомянутых данных о состоянии здоровья культуры;
- передают упомянутые данные о зоне обработки культур и соответствующем виде обработки на по меньшей мере одно автоматизированное средство обработки растений;
- осуществляют определенный вид обработки растений в упомянутой зоне с помощью упомянутого автоматизированного средства.
2. Способ по п. 1, характеризующийся тем, что аэросъемка осуществляется с помощью беспилотного летательного аппарата (БПЛА), самолета или аэростата.
3. Способ по п. 1, характеризующийся тем, что дополнительно определяют засеянную площадь по меньшей мере одной культуры по карте NDVI.
4. Способ по п. 3, характеризующийся тем, что дополнительно определяют площадь засеянной культуры с каждым типом состояния здоровья.
5. Способ по п. 4, характеризующийся тем, что типы состояния здоровья включают в себя по меньшей мере: здоровые растения, больные растения без возможности излечения, погибшие растения, больные растения с возможностью излечения.
6. Способ по п. 1, характеризующийся тем, что воздушная съемка осуществляется с помощью по меньшей мере одной высокочастотной камеры.
7. Способ по п. 6, характеризующийся тем, что съемка выполняется на высоте, не превышающей 25 м ±10%.
8. Способ по п. 1, характеризующийся тем, что вид обработки растений выбирается из группы: орошение, внесение средств защиты растений (СЗР), внесение удобрений или уборка культур.
9. Способ по п. 1, характеризующийся тем, что построение карты NDVI выполняется дополнительно на основании заданного масштаба усреднения.
10. Способ по п. 1, характеризующийся тем, что план дополнительно включает в себя данные о количестве и марке вносимых СЗР и/или удобрений, определяемых на основании обработки информации о типе заболеваний растений и/или их состоянии.
11. Способ по п. 1, характеризующийся тем, что автоматизированное средство обработки растений представляет собой БПЛА, аэростат или роботизированное устройство.
12. Способ по п. 1, характеризующийся тем, что дополнительно определяют количество растений на основании карты NDVI.
13. Способ по п. 1, характеризующийся тем, что на основании изображений аэросъемки дополнительно определяют тип болезни растительной культуры с помощью сравнения полученных изображений с изображениями базы данных заболеваний растений.
14. Способ по п. 1, характеризующийся тем, что дополнительно определяют на основании данных аэросъемки глубину гумусового слоя.
15. Способ по п. 1, характеризующийся тем, что дополнительно по полученным изображениям аэросъемки определяют содержание азота в почве.
16. Способ по п. 1, характеризующийся тем, что изображения аэросъемки привязаны к географическим координатам.
17. Система для обработки зон посева сельскохозяйственных культур на основании данных мониторинга, содержащая
по меньшей мере одно средство для осуществления аэросъемки зон посева сельскохозяйственных культур, выполненное с возможностью получения изображений упомянутых культур;
по меньшей мере одно средство обработки данных, выполненное с возможностью:
- на основании полученных изображений аэросъемки определять тип по меньшей мере одной растительной культуры;
- формировать NDVI карту на основании упомянутых данных съемки, отображающую состояние здоровья засеянных культур, на основании сравнения показателей полученной NDVI карты с эталонными показателями здоровья, соответствующими одному или более типам культур;
- определять по меньшей мере одну зону обработки культур, вид обработки и план обработки растений, включающий маршрут перемещения автоматизированного средства обработки растений, для каждой соответствующей зоны на основании упомянутых данных о состоянии здоровья культуры;
- передавать упомянутые данные о зоне обработки культур и соответствующем виде обработки на по меньшей мере одно автоматизированное средство обработки растений, выполненное с возможностью обработки растений на основании полученных данных.
18. Система по п. 17, характеризующаяся тем, что воздушная съемка осуществляется с помощью БПЛА, самолета или аэростата.
19. Система по п. 17, характеризующаяся тем, что средство обработки данных выбирается из группы: компьютер, смартфон, планшет, ноутбук, сервер, серверный кластер или мейнфрейм.
20. Система по п. 17, характеризующаяся тем, что средство обработки данных представляет собой процессор или микроконтроллер, установленный на борту средства для осуществления аэросъемки.
21. Система по п. 17, характеризующаяся тем, что автоматизированное средство обработки растений представляет собой БПЛА, аэростат или роботизированное устройство.
| ЭЛЕКТРОННО-ОПТИЧЕСКИЙ СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИИ ПРОИЗВОДСТВА АГРОПРОДУКЦИИ | 2009 |
|
RU2423042C2 |
| US 20160050840 A1, 25.02.2016 | |||
| МИХАЙЛЕНКО И.М | |||
| Теоретические основы и техническая реализация управления агротехнологиями, Изд-во политехнического ун-та, СПб, подп | |||
| в печ | |||
| Насос | 1917 |
|
SU13A1 |
| US 20120101784 A1, 26.04.2012 | |||
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ РОБОТ | 2011 |
|
RU2492620C2 |

