Область техники
Изобретения относятся к обслуживанию систем искусственных спутников различного назначения (мониторинга, навигации, связи и др.), расположенных на орбитах, которые могут быть сгруппированы по признаку близости (или равенства) их наклонений (i) и высот (фокальных параметров р) и распределены в экваториальной плоскости по долготе восходящего узла (Ω).
Примерами таких спутниковых систем могут служить системы ГЛОНАСС или GPS (см. [1] GPS vs ГЛОНАСС: какая система лучше. 16.12.2016: https://gpsmarker.ru/info/blog/gps-vs-glonass-kakaya-sistema-luchshe.html), где используются однотипные орбиты примерно одинакового наклонения (63,6° и 64,3°), равномерно разнесенные по параметру Ω. На каждой из орбит (числом 3 или 6) расположено по нескольку равномерно расставленных вдоль орбиты ИС (рабочее число 8 или 4).
Подобное построение спутниковых систем удобно как с точки зрения их целевого назначения, так и обслуживания (последнее требует меньшего числа сервисных космических аппаратов (КА) и меньшей энергетики для перелетов к разным обслуживаемым спутникам (ОС). Под "обслуживанием" подразумеваются такие операции, как дозаправка, ремонт, инспекция, изъятие (замена) и т.п.
Средства обслуживания (СО), в частности, сервисные КА могут доставляться к обслуживаемым ИС с помощью межорбитальных транспортных аппаратов (МТА) с реактивными двигателями (ЖРД, плазменными, ионными и др.).
Предшествующий уровень техники
При построении систем и схем обслуживания множества ОС, подобного отмеченному выше, может быть использовано такое явление, как регрессия линии узлов (РЛУ), имеющая место для орбит практически любых спутников (кроме полярных), вследствие нецентральности поля тяготения Земли. Угловая скорость РЛУ Ω' ~ cos (i)/p2, и на низких орбитах (р ~7000 км) достигает заметной велич.: около 4° в сутки при i ≈64° и менее, а с увеличением высоты орбиты быстро убывает.
Данное явление используется при выборе орбит СО (МТА с сервисными КА) - так, чтобы их наклонения были одинаковы или близки к наклонению орбит ОС, а фокальные параметры р орбит ОС отличались от таковых для орбит СО, что приводит к совмещению плоскостей орбит ОС и СО за счет различной скорости РЛУ тех и тех.
Это отражено, например, в патентах RU 2688120 C1, RU 2220886 С2, US 8016240 В2 и позволяет существенно уменьшить затраты характеристической скорости (ХСК) на маневры СО. Однако сам процесс совмещения плоскостей орбит ОС и СО может занять значит время (что снижает оперативность обслуживания и увеличивает время неудовлетворительного функционирования спутниковой системы).
Известно размещение вспомогательных или резервных спутников на синхронно прецессирующих (с той же угловой скоростью Ω', что и у орбит обслуживаемых (основных) спутников), но отличающихся по тем или иным орбитальным элементам (эксцентриситету, положению перигея, наклонению): US 5999127 A, US 6892986 В2 etc.
Такие приемы повышают эффективность (гибкость) функционирования системы основных спутников, но не затрагивают обслуживания спутников с помощью СО, перемещаемых со своих орбит на орбиты ОС.
Наиболее близкими к предлагаемым изобретениям являются космическая обслуживающая система (КОС) и способ ее функционирования, описанные в пат.[2] RU 2535760 С1.
КОС [2] содержит средства обслуживания (СО) спутников, размещенные на одной или более орбитах базирования, соответствующих своим областям обслуживания (например, указанным выше группам орбит) и доставляемые с этих орбит к обслуживаемым спутникам (ОС). Способ функционирования КОС [2] включает размещение СО на одной или более орбитах базирования и доставку с этих орбит к ОС.
Недостатком известных КОС и способа [2] является то, что в их рамках не разработаны методы управления движением СО, позволяющие сократить времена доставки СО к ОС при ограничении затрат ХСК на маневры средств доставки (МТА).
Сущность изобретений
Задачей предлагаемых изобретений является устранение указанного выше недостатка путем разработки КОС и способа ее функционирования, позволяющих обеспечить обслуживание объектов на орбитах, образующих пространственную конфигурацию, с сокращенными временами доставки СО к ОС и при ограничении затрат ХСК на маневры средств доставки.
Техническим результатом является повышение оперативности обслуживания ОС без существенного роста потребных затрат ХСК для маневров средств доставки.
Решение поставленной задачи, с получением указанного технического результата достигается тем, что КОС, содержащая СО спутников, размещенные на одной или нескольких орбитах базирования, соответствующих своим областям обслуживания, и доставляемые с этих орбит к ОС - снабжена базовыми КА (БКА) на орбитах базирования, включающими модули полезных нагрузок (ПН) и модульные МТА для перемещения СО между БКА и ОС, средствами получения и обработки данных о состоянии и функционировании (ДСФ) ОС и передачи результатов обработки ДСФ на БКА, снабженные системами приема и формирования на основе этих результатов состава СО, конфигурации МТА и оптимальных, с учетом разностей скоростей регрессии линий узлов орбит ОС и орбит базирования, траекторий доставки СО к ОС, причем одна или более орбит базирования выбраны с фокальным параметром (р'), насколько возможно меньшим характерного фокального параметра (р) орбит спутников из соответствующих областей обслуживания, и с наклонением (i'), близким к характерному наклонению (i) орбит спутников из этих же областей обслуживания.
Возможны варианты, когда средства получения и обработки ДФС ОС расположены на наземных пунктах, имеющих каналы связи с БКА и/или МТА, либо - когда эти средства установлены на БКА и/или МТА, а МТА снабжены средствами изменения своей конфигурации.
Модульные МТА могут включать в себя унифицированные, стыкуемые друг с другом двигательные ступени с химическими, например, жидкостными ракетными двигателями (ЖРД) и электроракетными, например, стационарными плазменными (СПД) двигателями.
Преимущественно, орбиты базирования являются низкими околоземными орбитами, обслуживаемыми многоразовыми аэрокосмическими транспортными КА с возвращаемыми ступенями.
Решение поставленной задачи, с получением указанного технического результата достигается также тем, что в способе функционирования КОС, включающем размещение СО на одной или нескольких орбитах базирования и доставку с этих орбит к ОС - на одну или несколько орбит базирования выводят БКА и модульные МТА, периодически доставляют туда модули ПН, на основе переданных результатов обработки ДСФ ОС определяют вероятные сроки, вид и очередность обслуживания ОС, оптимальную, например, по минимуму ХСК при текущем прогнозе времени доставки СО к ОС, первичную траекторию МТА в плоскости его оскулирующей орбиты, совпадающей при старте МТА с плоскостью орбиты базирования, формируют состав СО из набора требуемых для обслуживания модулей ПН, конфигурацию МТА в виде указанных двигательных ступеней, заправленных от БКА в соответствии с указанной первичной траекторией МТА и состыкованных с модулями ПН, после чего переводят МТА на указанную траекторию, периодически обновляют прогноз времени доставки СО к ОС и точку встречи, корректируя текущую оптимальную траекторию МТА, при движении по которой фокальный параметр орбиты МТА изменяют от исходного (р') до конечного (близкого к р) по закону, обеспечивающему в прогнозируемое время доставки ПН к ОС максимальное совмещение плоскостей орбит МТА и ОС вследствие разностей скоростей регрессии линий узлов этих орбит, корректируя при необходимости наклонение (i') орбиты МТА.
При возникновении невозможности последовательного перемещения МТА между несколькими ОС по текущей оптимальной траектории производят реконфигурацию МТА с перестыковкой ПН и ступеней в две или более конфигураций МТА, их разделением и перемещением по разным оптимальным траекториям от точки разделения к соответствующим ОС, управляя движением МТА на каждой из этих траекторий, как указано выше.
Преимущественно, при движении МТА по текущей оптимальной траектории используют электроракетные, например, СПД двигатели, а при возникновении дефицита времени на обслуживание некоторого ОС (в результате прогноза или фактического выхода из строя ОС) применяют ступень с ЖРД.
Возвращение МТА на орбиту базирования, в предпочтительном варианте, осуществляется с помощью электроракетного, например, СПД двигателя.
Перечень фигур
Существо предлагаемого изобретения поясняется нижеследующим детальным описанием примеров их осуществления с прилагаемыми чертежами, на которых изображены:
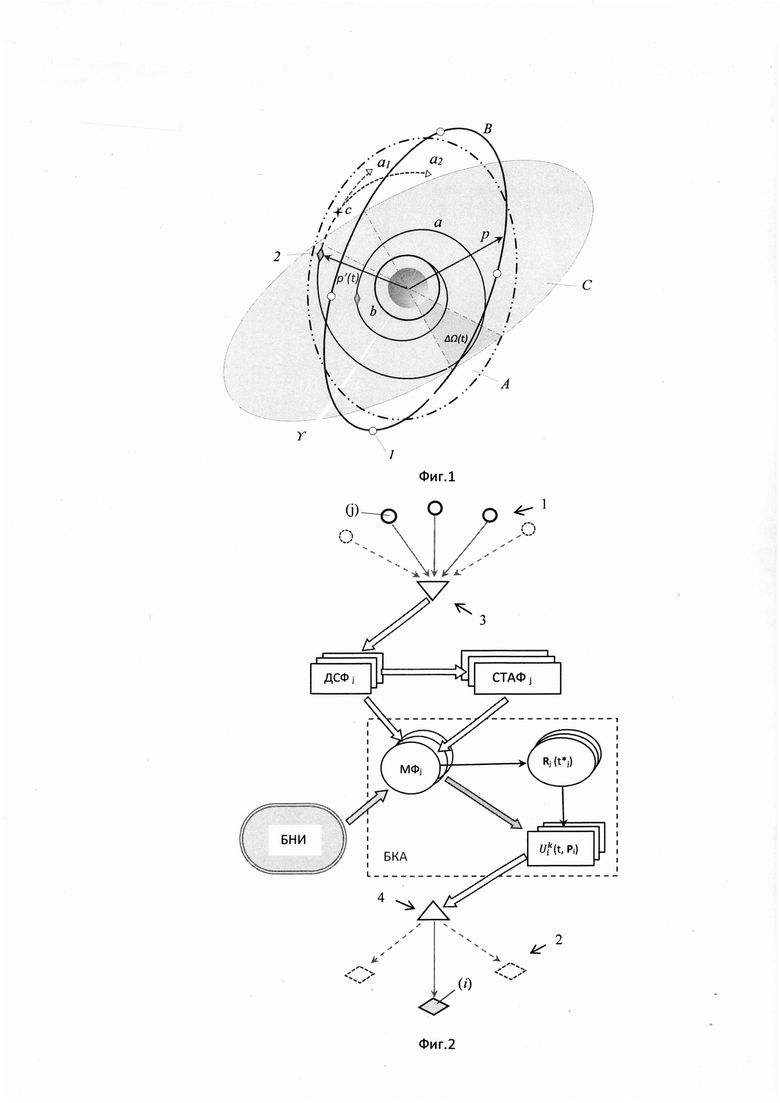
Фиг. 1 - основные фрагменты предлагаемой КОС и особенности реализации предлагаемого способа обслуживания системы ОС;
Фиг. 2 - схема построения и реализации управления движением МТА согласно предлагаемому способу.
Раскрытие и примеры осуществления изобретений
Спутниковые системы, расположенные на низких орбитах: до нижней высотной границы внутреннего радиационного пояса ~ 500 км, имеют ограниченный обзор Земли и окружающего космоса, и их обслуживание затруднено из-за большого их потребного числа, большого разнообразия орбит, значительных затрат ХСК на межорбитальные маневры, и как следствие - быстрого накопления космического мусора. В настоящее время имеется тенденция использования множества пико- и нано спутников (типа Cubesat), обслуживание которых разумно свести к их своевременной ликвидации собственными средствами (направлением в атмосферу). Потребность в специальных КОС в данной околоземной области, по-видимому, отсутствует (и могла бы привести лишь к дополнительному скоплению разных КА и мусора).
Области между внутренним и внешним радиационными поясами (высоты ≈6000 км и 12000 км) и выше условной границы внешнего пояса (высоты более ≈ 18 000 км) являются благоприятными для развертывания там спутниковых систем (таких как навигационные, связные и мониторинговые) - не только с точки зрения радиационной безопасности, но и целевого назначения (широкие области обзора, меньшее потребное число спутников и др.). В этих областях могут создаваться многофункциональные КА (платформы) значительной мощности, развитой модульной архитектуры и т.п. Здесь же целесообразно сосредоточить основную активность КОС (в т.ч. с точки зрения затрат ХСК).
Таким образом системы, подобные ГЛОНАСС или GPS (и их комбинации и модификации), а также расположенные несколько ниже (на высотах ≈ 6000…12000 км) являются наиболее подходящими для построения для них тех или иных КОС (а по существу - некоторой интеграции КОС с системами ОС).
На фиг.1 представлен фрагмент обслуживаемой системы, которая содержит ОС 1 на орбитах В. Плоскости орбит В наклонены к плоскости экватора С и распределены вдоль него по долготе восходящего узла Ω.
Предлагаемая КОС содержит СО спутников, размещенные на одной или более низких орбитах базирования (b), для каждой из которых может быть выделена своя область обслуживания (например, близкие по высоте орбиты одного наклонения i). Чем ниже орбита b, тем больше скорость прецессии ее плоскости Ω' относительно плоскостей орбит ОС, что желательно.
На орбитах b базируются БКА (типа орбитальных платформ или станций), на которых формируются СО для ОС 1 из модулей ПН (ПН включают в себя набор заменяемых узлов, блоков, подсистем; запасы рабочих тел для двигательных систем ОС, СТР и т.д.). На орбитах b также паркуются модульные МТА 2 (фиг.1). МТА снабжены необходимым набором робототехнических средств для операций с ОС, и могут также иметь средства изменения своей собственной конфигурации.
КОС снабжена средствами получения и обработки данных о состоянии и функционировании (ДСФ) ОС. Этими данными являются прежде всего телеметрические, но может быть и иная информация, например, качество изображений бортовых телекамер, сбои передаваемых сигналов, наблюдаемые с Земли отклонения орбит и внешней конфигурации ОС и т.д.
Обработка ДСФ имеет целью получить прогноз о дальнейшем функционировании систем ОС и возможных отказах. Она может производиться на наземных пунктах или на БКА и вестись совместно с известными (заложенными в системы управления ОС) стратегиями и алгоритмами функционировании (СТАФ). Эти СТАФ предписывают перестройку работы систем ОС в случае тех или иных отказов (например, при поломке приводов разворота СБ изменяют режим работы системы ориентации всего КА). Результаты обработки ДСФ совместно со СТАФ (если они получены вне БКА) передаются на БКА, где вырабатываются модели функционирования (МФ) спутников. На основе MФj каждого j-го ОС должен быть получен прогноз времени (t*j) и вида критического (требующего обслуживания) отказа этого j-го ОС, а также - его орбитального положения Rj (t*j) в момент отказа.
Сказанное иллюстрируется фиг.2, где показано также, что для выработки МФj могут использоваться данные из банка накопленной информации (БНИ) - некоторой библиотеки полученных за длительный период и систематизированных сведений (например, статистик) о работе и отказах различных КА в разных условиях эксплуатации.
Информация, включающая ДСФ, принимается терминалами 3 (на Земле или на БКА) и далее обрабатывается (фильтруется, ранжируется и т.д.).
На основе модели МФj и прогноза Rj (t*j) для j-го ОС определяется (например, на БКА) оптимальное (кусочно-оптимальное) управление Ukj(t, Рi) для подходящего i-го МТА из соответствующей области обслуживания. При этом начальными условиями для каждого участка (куска) траектории являются положение Ri (t-) и скорость Vi (t-) МТА в момент t- получения последнего прогноза, а конечными - полученный в момент t- прогноз Rj (t*j) и соответствующая орбитальная скорость Vj (t*j). Параметры управления Рi могут обновляться при каждом прогнозе.
Оптимизация управления может каждый раз проводиться по минимуму ХСК за заданное время движения (t* - t-) при условии нахождения траектории МТА (а) в плоскости (А) его оскулирующей орбиты, имеющей текущий фокальный параметр p'(t) (фиг.1). Однако возможны и другие, в частности, вероятностные критерии оптимальности.
При получении первого прогноза - к моменту старта МТА с орбиты b - определяется состав СО в виде модулей ПН для ОС (возможность этого, очевидно, предполагает, ввиду неизбежной неточности прогноза, высокий уровень унификации и модульности всех узлов и систем ОС), а также - набор ступеней МТА с химическими (ЖРД) и/или электроракетными (СПД или ионными) двигателями.
Прогнозы для нескольких (m) ОС могут «вписываться» в единую (кусочно-оптимальную) траекторию движения МТА - последовательно от одного ОС к другому. В этом случае ПН на орбите базирования формируется для всех этих ОС, а управление «сшивается» из кусков Uki, (t, Рi), где i=i1, i2, … im-1 (индексы отмечают, в частности, изменение структуры МТА и ПН при каждом обслуживании).
Данные об управлении (управляющие команды, директивы или программы) передаются на МТА 2 посредством терминалов 4 (фиг.2).
В процессе уточнения прогнозов последовательное перемещение МТА между несколькими ОС может стать невыполнимым (по ограничениям на время доставки СО при заданном запасе ХКС). Тогда производят реконфигурацию МТА с перестыковкой модулей ПН и ступеней в две (или более) конфигураций МТА и ПН с их разделением, что показано на фиг.1 в виде разветвления траектории (а) в точке (с) на отдельные траектории a1 и а2 ступеней МТА с частями ПН (все траектории условно показаны плоскими, но на самом деле они, конечно, пространственные, т.к. плоскость А прецессирует). Управление на каждой траектории а1 и а2 строится по вышеописанным принципам. При этом на одной из траекторий ai параметр p'(t) может некоторое время убывать (для увеличения Ω').
Если прибытие МТА с ПН к ОС ожидается раньше очередного прогноза, то реализуются пассивные участки траектории полета МТА.
Параметры Р, могут учитывать указанное выше изменение структуры МТА и ПН: при отделении частей ПН (в процессе обслуживания нескольких ОС) и при разделении ступеней МТА (в случае разветвления траектории).
Поскольку время прогноза практически составит не менее 10-15 сут (~ 106 с), а потребная ХКС - порядка 3000-4000 м/с, то необходимая тяговооруженность v ≈ 0,003-0,004 м/с2, что на порядок меньше штатной тяговооруженности (отношения тяги к массе двигателя) n таких двигателей, как, например, модели СПД-230, 200, 140 (ОКБ «Факел»), для которых n ≈ 0,03-0,04 м/с2, ввиду чего масса двигателей составит лишь несколько более 10% массы МТА с ПН. Удельный импульс данных СПД достигает 2000-3000 с.
Поэтому применение таких двигателей малой тяги предпочтительно, и переход к использованию на МТА двигателей большой тяги (ЖРД) целесообразен лишь в случае возникшей необходимости (дефицита времени на обслуживание некоторого ОС). Возвращение МТА на орбиту базирования также производится с помощью СПД.
Что касается прогнозирования отказов ОС, то, вообще говоря, за грубое приближение можно принять срок штатного функционирования ОС (например, 10 лет). Более точный прогноз получается при отслеживании расхода рабочего тела на коррекцию и ориентацию и/или - деградации солнечных батарей (по их выходной мощности). Для прогнозов по другим системам ОС, на основе ДСФ, требуются гораздо более обширная информация и ее глубокий (компьютерный) анализ. Случайные поломки (например, в случае пробоя микрометеоритом) можно учитывать при выработке СТАФ, с оценками времени аварийной работы систем ОС - для наиболее вероятного спектра таких поломок.
Возможен также особый подход к проектированию КА (ОС), когда времена работы всех его систем и узлов строго лимитированы (и согласованы, например, с кругом задач данного КА) - что может быть экономически целесообразным в рамках объединенных спутниковой системы и КОС.
Промышленная применимость
Для осуществления предлагаемых изобретений не требуется принципиально новых теоретических представлений и разработок в области ракетно-космической техники; здесь могут быть использованы известные средства и методы построения космических систем и управления ими.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обслуживания космических объектов на орбитах различного наклонения и высокоорбитальная космическая инфраструктура для реализации способа | 2022 |
|
RU2775039C1 |
| Способ обслуживания системы спутников на околокруговых орбитах и космическая обслуживающая система для осуществления способа | 2022 |
|
RU2772498C1 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| КОСМИЧЕСКАЯ ОБСЛУЖИВАЮЩАЯ СИСТЕМА И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2013 |
|
RU2535760C1 |
| Способ обслуживания искусственных спутников на средних и высоких околоземных орбитах | 2022 |
|
RU2774915C1 |
| СПОСОБ МЕЖОРБИТАЛЬНОЙ ТРАНСПОРТИРОВКИ ПОЛЕЗНЫХ ГРУЗОВ | 2009 |
|
RU2404091C1 |
| СПОСОБ НАБЛЮДЕНИЯ ПОВЕРХНОСТИ ПЛАНЕТЫ ИЗ КОСМОСА И КОСМИЧЕСКАЯ СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2013 |
|
RU2535375C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ФУНКЦИОНИРОВАНИЯ СПУТНИКОВОЙ СИСТЕМЫ НЕПРЕРЫВНОГО ГЛОБАЛЬНОГО ОБЗОРА ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2017 |
|
RU2705030C2 |
| СПОСОБ ПОДДЕРЖАНИЯ ФУНКЦИОНИРОВАНИЯ СПУТНИКОВОЙ СИСТЕМЫ НЕПРЕРЫВНОГО ГЛОБАЛЬНОГО ОБЗОРА ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2017 |
|
RU2705029C2 |
| СПОСОБ ПОДДЕРЖАНИЯ ФУНКЦИОНИРОВАНИЯ СПУТНИКОВОЙ СИСТЕМЫ НЕПРЕРЫВНОГО ГЛОБАЛЬНОГО ОБЗОРА ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2017 |
|
RU2705028C2 |
Группа изобретений относится к обслуживанию систем искусственных спутников различного назначения, включающих группы орбит с равным или близким наклонением (i), распределенных в экваториальной плоскости по долготе восходящего узла (Ω). Космическая обслуживающая система содержит средства обслуживания (СО) спутников, базовыми космическими аппаратами (БКА) на орбитах базирования, средствами получения и обработки данных о состоянии и функционировании (ДСФ) ОС и передачи результатов обработки ДСФ на БКА. Причем орбиты базирования выбраны с фокальным параметром (р'), насколько возможно меньшим характерного фокального параметра (р) орбит спутников из соответствующих областей обслуживания, и с наклонением (i'), близким к характерному наклонению (i) орбит спутников из этих же областей обслуживания. БКА содержат модули полезных нагрузок (ПН) и модульные межорбитальные транспортные аппараты (МТА) для перемещения СО между БКА и ОС. Управление движением МТА строится на основе прогнозов времен отказов ОС и включает регулирование скорости прецессии (Ω') плоскости оскулирующей орбиты МТА путем определенного изменения фокального параметра указанной орбиты. Повышается оперативность обслуживания ОС. 2 н. и 6 з.п. ф-лы, 2 ил.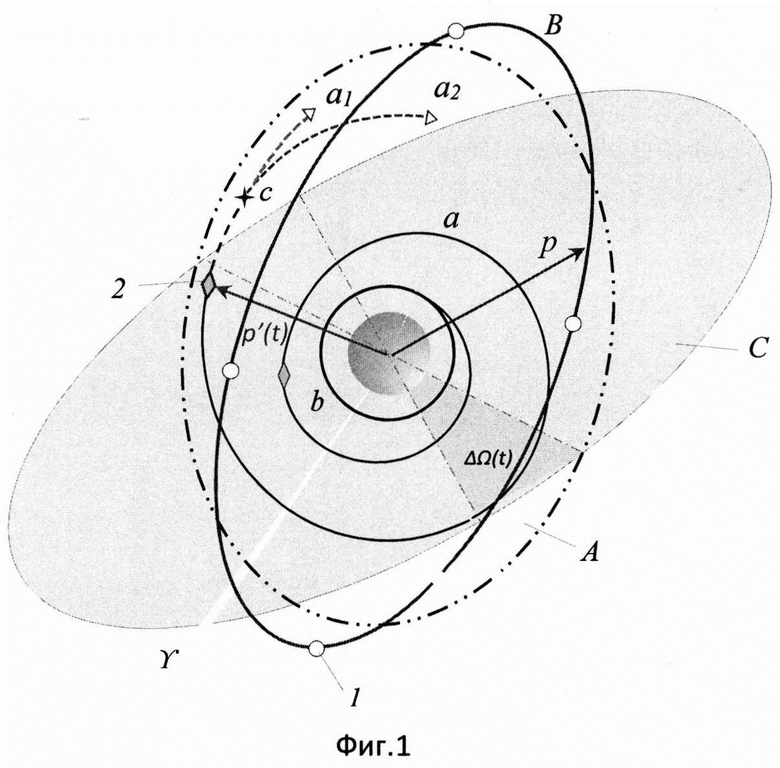
1. Космическая обслуживающая система, содержащая средства обслуживания (СО) спутников, размещенные на одной или нескольких орбитах базирования, соответствующих своим областям обслуживания, и доставляемые с этих орбит к обслуживаемым спутникам (ОС), отличающаяся тем, что снабжена базовыми космическими аппаратами (БКА) на орбитах базирования, включающими модули полезных нагрузок (ПН) и модульные межорбитальные транспортные аппараты (МТА) для перемещения СО между БКА и ОС, средствами получения и обработки данных о состоянии и функционировании (ДСФ) ОС и передачи результатов обработки ДСФ на БКА, снабженные системами приема и формирования на основе этих результатов состава СО, конфигурации МТА и оптимальных, с учетом разностей скоростей регрессии линий узлов орбит ОС и орбит базирования, траекторий доставки СО к ОС, причем одна или более орбит базирования выбраны с фокальным параметром (р'), насколько возможно меньшим характерного фокального параметра (р) орбит спутников из соответствующих областей обслуживания, и с наклонением (i'), близким к характерному наклонению (i) орбит спутников из этих же областей обслуживания.
2. Космическая система по п. 1, отличающаяся тем, что средства получения и обработки ДФС ОС расположены на наземных пунктах, имеющих каналы связи с БКА и/или МТА, либо установлены на БКА и/или МТА, а МТА снабжены средствами изменения своей конфигурации.
3. Космическая система по п. 1 или 2, отличающаяся тем, что модульные МТА включают в себя унифицированные, стыкуемые друг с другом двигательные ступени с химическими, например, жидкостными ракетными двигателями (ЖРД) и электроракетными, например, стационарными плазменными двигателями (СПД).
4. Космическая система по п. 1, отличающаяся тем, что орбиты базирования являются низкими околоземными орбитами, обслуживаемыми многоразовыми аэрокосмическими транспортными КА с возвращаемыми ступенями.
5. Способ функционирования космической обслуживающей системы по любому из пп. 1-4, включающий размещение СО на одной или нескольких орбитах базирования и доставку с этих орбит к ОС, отличающийся тем, что на одну или несколько орбит базирования выводят БКА и модульные МТА, периодически доставляют туда модули ПН, на основе переданных результатов обработки ДСФ ОС определяют вероятные сроки, вид и очередность обслуживания ОС, оптимальную, например, по минимуму затрат характеристической скорости (ХСК) при текущем прогнозе времени доставки СО к ОС, первичную траекторию МТА в плоскости его оскулирующей орбиты, совпадающей при старте МТА с плоскостью орбиты базирования, формируют состав СО из набора требуемых для обслуживания модулей ПН, конфигурацию МТА в виде указанных двигательных ступеней, заправленных от БКА в соответствии с указанной первичной траекторией МТА и состыкованных с модулями ПН, после чего переводят МТА на указанную траекторию, периодически обновляют прогноз времени доставки СО к ОС и точку встречи, корректируя текущую оптимальную траекторию МТА, при движении по которой фокальный параметр орбиты МТА изменяют от исходного (р') до конечного (близкого к р) по закону, обеспечивающему в прогнозируемое время доставки ПН к ОС максимальное совмещение плоскостей орбит МТА и ОС вследствие разностей скоростей регрессии линий узлов этих орбит, корректируя при необходимости наклонение (i') орбиты МТА.
6. Способ по п. 5, отличающийся тем, что при возникновении невозможности последовательного перемещения МТА между несколькими ОС по текущей оптимальной траектории производят реконфигурацию МТА с перестыковкой ПН и ступеней в две или более конфигураций МТА, их разделением и перемещением по разным оптимальным траекториям от точки разделения к соответствующим ОС, управляя движением МТА на каждой из этих траекторий, как указано выше.
7. Способ по п. 5 или 6, отличающийся тем, что при движении МТА по текущей оптимальной траектории используют электроракетные, например, СПД двигатели, а при возникновении дефицита времени на обслуживание некоторого ОС, в результате прогноза или фактического выхода из строя ОС, применяют ступень с ЖРД.
8. Способ по любому из пп. 5-7, отличающийся тем, что МТА возвращают на орбиту базирования с помощью электроракетного, например, СПД двигателя.
| КОСМИЧЕСКАЯ ОБСЛУЖИВАЮЩАЯ СИСТЕМА И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2013 |
|
RU2535760C1 |
| RU 2058916 C1, 27.04.1996 | |||
| US 6892986 B2, 17.05.2005 | |||
| US 5267167 A1, 30.11.1993 | |||
| US 5669585 A1, 23.09.1997. | |||

