Область техники
Изобретения относятся к методам и средствам обслуживания спутниковых систем различного назначения (мониторинга, навигации, связи и др.), преимущественно в эпоху достаточно развитой индустриализации ближнего космоса (околоземного и окололунного пространства).
Облик космических средств в данную эпоху отражен, например, в монографии [1] B.C. Авдуевский, Г.Р. Успенский. Космическая индустрия. М. Маш. 1989, с. 69-71.
Там представлены орбитальные системы и способы обслуживания различных космических объектов (КО): спутников, орбитальных станций, платформ и т.д., предусматривающие размещение на базовых орбитах (БО) необходимых средств обслуживания (СО): расходуемых материалов (топлива, рабочего тела системы терморегулирования и системы жизнеобеспечения), сменных блоков и узлов, роботов-манипуляторов и проч. Эти средства доставляются к обслуживаемым спутникам с помощью межорбитальных транспортных аппаратов МТА ("буксиров"), построенных по модульному принципу, которые могут базироваться на тех же орбитах, что и средства обслуживания.
В этот период освоения космоса следует ожидать высокого уровня развития космического производства (на околоземных орбитах, а также в начальной стадии - на поверхности Луны). Для всех типов КО (в т.ч. МТА) и средств обслуживания (СО) должны быть характерны значительные модульность, унификация систем и узлов, многократность применения.
Предшествующий уровень техники
Характерным примером обслуживаемых КО служат системы («созвездия») спутников, такие как ГЛОНАСС или GPS (см. [2] GPS vs ГЛОНАСС: какая система лучше. 16.12.2016: https://gpsmarker.ru/info/blog/gps-vs-glonass-kakaya-sistema-luchshe.html),
в которых используют однотипные орбиты одного наклонения (около 64°), равномерно разнесенные по долготе восходящего узла (ДВУ) Ω. На каждой из орбит (числом от 3 до 6) расположено по нескольку равномерно расставленных вдоль орбиты спутников (рабочее число от 8 до 4).
Для обслуживания (в т.ч. замены) таких КО могут быть эффективны, по затратам характеристической скорости на доставку СО к обслуживаемым КО, так наз. "многоярусные" системы обслуживающих спутников, орбиты которых выбирают из условия постоянства скорости регрессии линии узлов (Ω'j(t)=const), причем данные j-e орбиты могут отличаться друг от друга по другим параметрам (а, е, i, …). Примеры "многоярусных" систем приведены в [3] RU 2535760 С1, а также в [4] US 6892986 В2 и [5] US 5999127 А.
Однако для обслуживания множества КО, орбиты которых существенно отличаются по наклонению (i), а также по скорости регрессии линии узлов (Ω') - данные системы обслуживания могут быть энергетически не эффективны, либо требовать достаточно длительного времени обслуживания.
Примером универсальной системы, содержащей инфраструктуру СО и МТА, обеспечивающих доставку СО к различным КО, служит упомянутая выше орбитальная система [1] и способ обслуживания КО при посредстве этой орбитальной системы с указанной инфраструктурой. Данные способ и инфраструктура приняты в качестве ближайших аналогов предлагаемых изобретений.
Известный способ [1] включает размещение на околоземной БО транспортно-технических центров (ТТЦ), СО и модульных МТА для доставки СО на орбиты обслуживаемых КО, взаимодействие СО и МТА с ТТЦ, перелеты МТА между БО и орбитами КО.
Известная орбитальная инфраструктура [1] включает в себя размещенные на околоземной БО один или более орбитальных ТТЦ, СО и модульные МТА для доставки СО на орбиты обслуживаемых КО и возврата на БО.
Известные способ и инфраструктура [1] предполагают существенное перенесение активности по ремонту, модернизации, снабжению и замене обслуживаемых КО с Земли в космос (на ТТЦ, которые могут снабжаться не только с Земли, но и с других космических тел и объектов). На борту ТТЦ могут, например, формироваться (изготовляться) новые элементы и системы КО взамен отработавших - либо путем восстановления неисправных единиц, либо путем их прямого производства из соответствующего сырья (с получением уникальных свойств в условиях микрогравитации, вакуума и т.д.).
Недостатком известных решений [1] является то, что в них специально не рассматривается обслуживание КО (спутников) на средних и высоких орбитах (радиусом ~10 000 … 30 000 км) разного наклонения и не определяются оптимальные схемы такого обслуживания.
Сущность изобретений
Задачей предлагаемых изобретений является устранение указанного выше недостатка путем разработки способа обслуживания КО и реализующей его высокоорбитальной космической инфраструктуры (ВКИ), позволяющих обеспечить указанное обслуживание КО (спутников) в оперативном режиме и при относительно небольших затратах характеристической скорости.
Техническим результатом является достижение оперативного обслуживания КО на средних и высоких орбитах любого наклонения при небольших затратах характеристической скорости, в условиях достаточно высокого уровня развития глобальной космической активности.
Решение поставленной задачи, с получением указанного технического результата достигается тем, что в способе обслуживания КО, включающем размещение на околоземной БО транспортно-технических центров (ТТЦ), СО и модульных МТА для доставки СО на орбиты обслуживаемых КО, взаимодействие СО и МТА с ТТЦ, перелеты МТА между БО и орбитами КО, в качестве БО используют экваториальную круговую или близкую к ней орбиту, переводят СО с помощью разгонной ступени (PC) МТА на промежуточную орбиту в плоскости БО с максимально высоким, насколько допускают сроки обслуживания заданного КО, апогеем, в котором от МТА отделяют СО с доводящей ступенью (ДС) и переводят СО с помощью ДС на переходную орбиту того же наклонения (i), что и орбита КО, и лежащую в плоскости, смещенной по ДВУ от плоскости орбиты КО на угол (ΔΩ), определяемый разностью регрессий линий узлов орбиты КО и переходной орбиты за время движения СО от указанного апогея до сближения и встречи с КО, переводят СО на орбиту КО, обеспечивая встречу с КО и его обслуживание, при этом МТА возвращается по нисходящей ветви промежуточной орбиты к БО, а ДС по завершении обслуживания КО возвращают на БО с помощью двигателей малой тяги, например, стационарных плазменных двигателей (СПД).
Преимущественно БО расположена выше любой из орбит обслуживаемых КО.
СО могут быть составлены из структурно-функциональных элементов (СФЭ) КО, формируемых в ТТЦ, и сервисных модулей, возвращаемых на БО с помощью ДС.
СО на указанные промежуточную и переходную орбиты преимущественно переводят с помощью двигателей большой тяги, например, жидкостных реактивных двигателей (ЖРД).
Перевод СО с переходной орбиты на орбиту КО и встречу с ним могут осуществлять в перигее переходной орбиты посредством двигателей ДС большой тяги, например, ЖРД.
В другом варианте, перевод СО с переходной орбиты на орбиту КО и встречу с ним могут осуществлять посредством двигателей ДС малой тяги, например, СПД, создающих тягу в плоскости оскулирующей переходной орбиты.
Преимущественно, МТА возвращают на БО с помощью двигателей указанной PC, причем PC оснащена двигателями большой тяги, например, ЖРД.
Решение поставленной задачи и достижение технического результата обеспечиваются также предлагаемой ВКИ, включающей в себя размещенные на околоземной БО один или более орбитальных ТТЦ, СО и модульные МТА для доставки СО на орбиты обслуживаемых КО и возврата на БО, причем БО выбрана экваториальной круговой или близкой к ней, в состав МТА входят двигательные модули (ДМ), часть из которых имеют химические, а часть - электроракетные, например, СПД - двигатели, причем из модулей МТА могут быть собраны PC для перевода СО с БО на эллиптические промежуточные орбиты, а также ДС для перевода СО на переходные орбиты к орбитам обслуживаемых КО и возвращения на БО.
Преимущественно БО расположена выше любой из орбит обслуживаемых КО.
СО могут быть получены в ТТЦ объединением структурно-функциональных элементов (СФЭ) КО, формируемых из доставляемых на ТТЦ материалов и изделий, и сервисных модулей, возвращаемых на БО с помощью ДС.
Перечень фигур
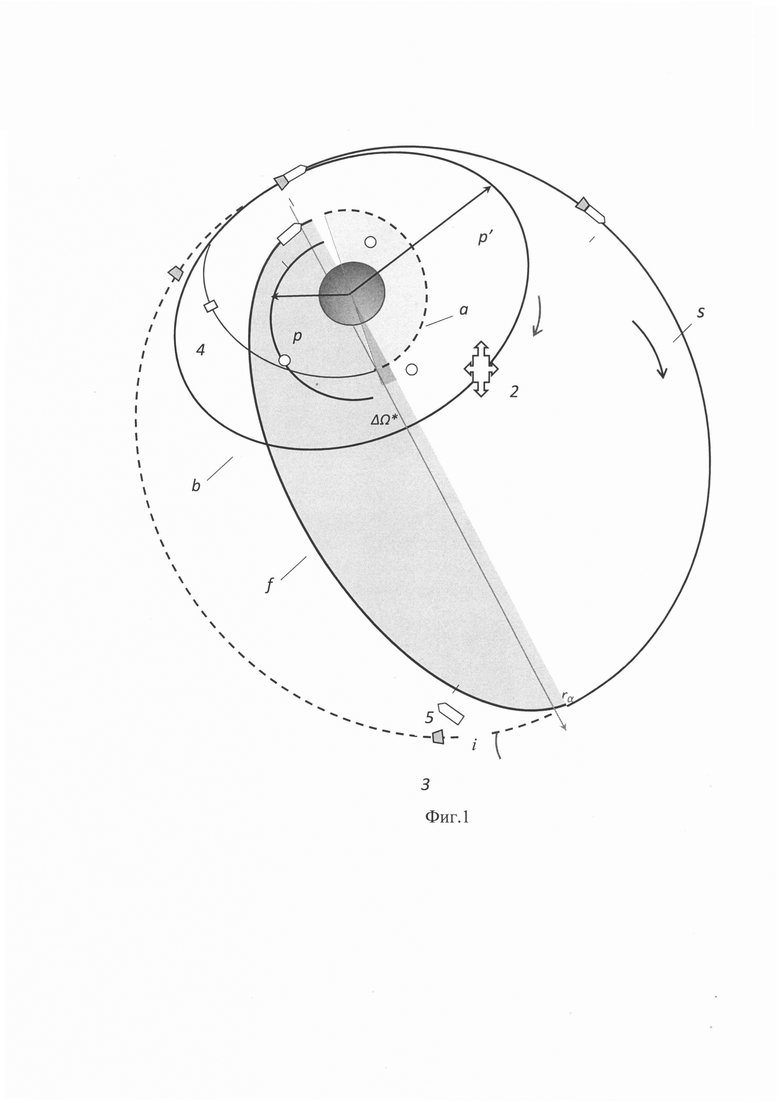
Существо предлагаемых изобретений поясняется нижеследующим детальным описанием примеров их осуществления с прилагаемыми чертежами, на которых изображены: Фиг. 1 - предлагаемая ВКИ и схема межорбитальных маневров;
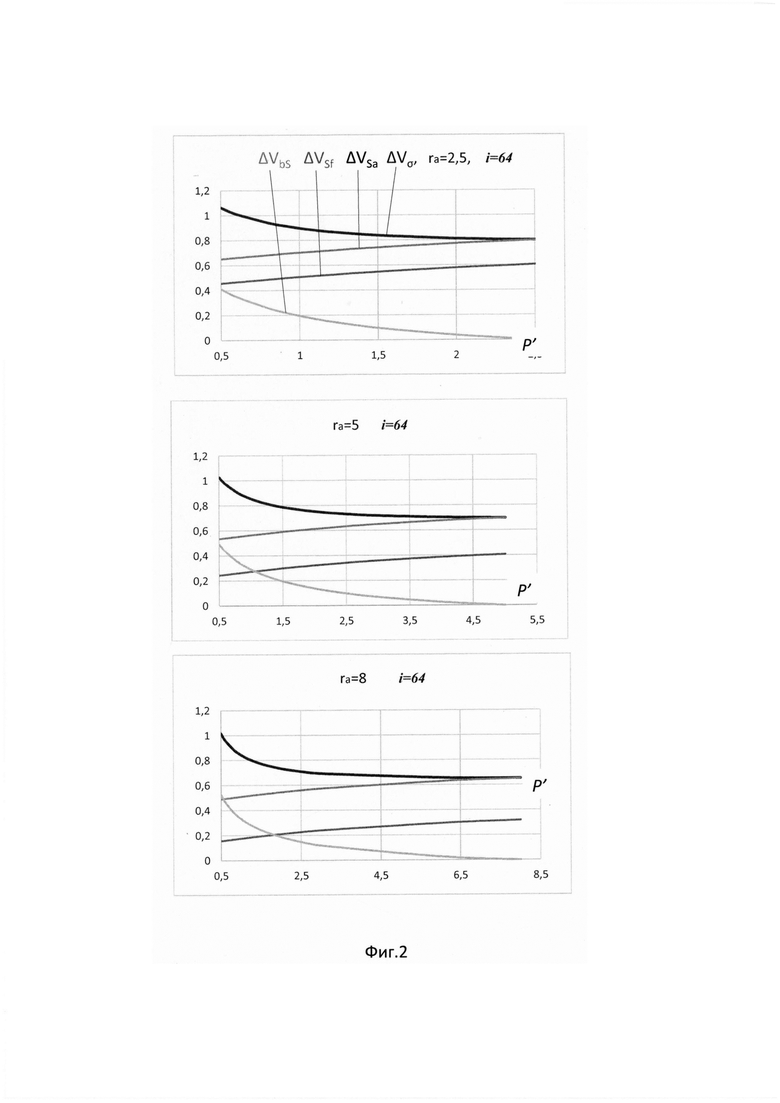
Фиг. 2 - зависимости приращений ΔV j скоростей для основных межорбитальных переходов от относительного положения базовой (с фокальным параметром р') и обслуживаемой (с параметром р и наклонением i=64°) орбит, при разных радиусах апогея (ra) промежуточной орбиты (S); значения rа и р' отнесены к параметру р, a ΔV j - к орбитальной скорости Vр на обслуживаемой орбите (a);
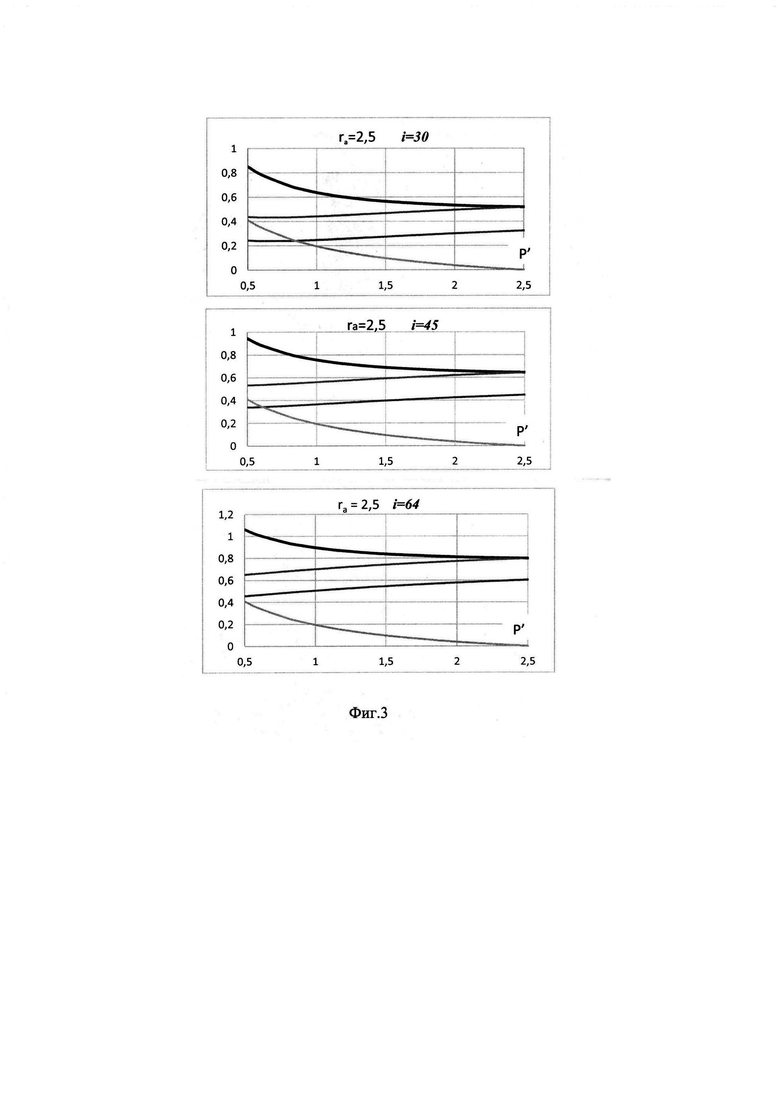
Фиг. 3 - те же зависимости ΔVj от параметра р' при фиксированном радиусе апогея орбиты S (ra=2,5) и разных наклонениях обслуживаемой орбиты: i=30°, 45, 64°;
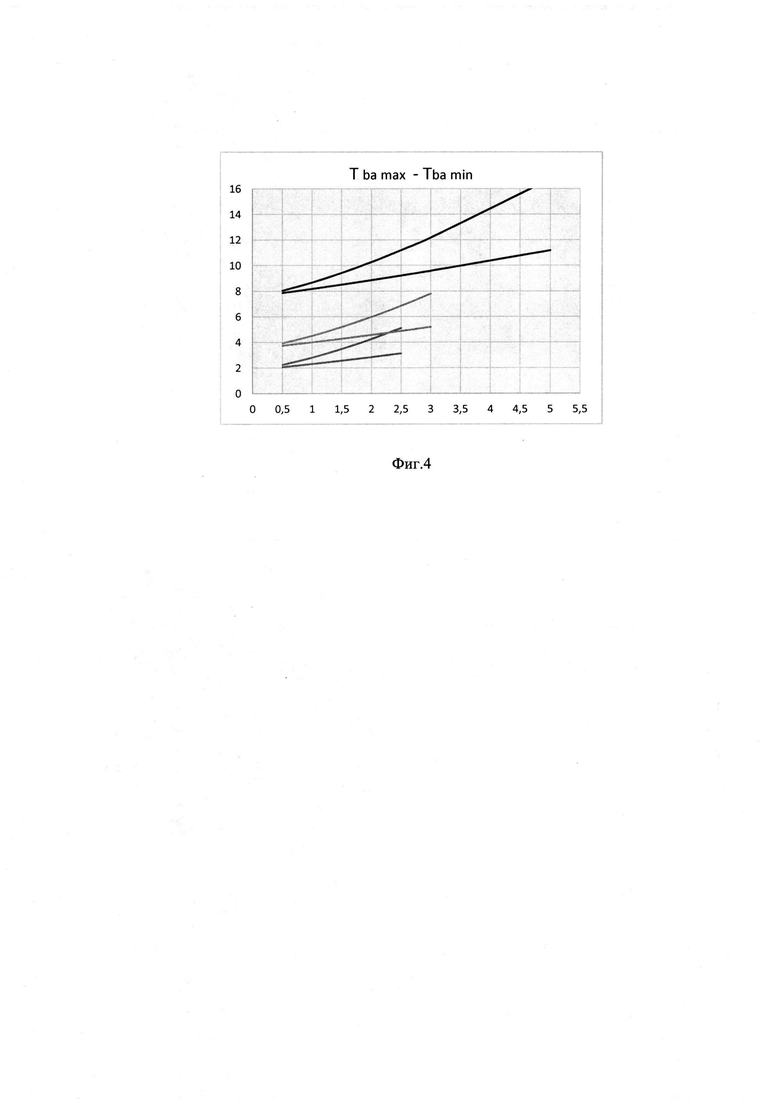
Фиг. 4 - зависимости максимального (Tab max) и минимального (Tab min) времен доставки ПН с базовой орбиты (b) к обслуживаемым КО на орбите (a); значения времен отнесены к периоду обращения по орбите (a).
Раскрытие и примеры осуществления изобретений
Предлагаемый способ обслуживания КО осуществляется с БО, которая должна быть достаточно высокой, учитывая, что в обозримой перспективе внеземная активность будет все более охватывать пространство до геостационарной орбиты (ГСО), за исключением, быть может, радиационных поясов.
В этой ситуации, с ростом числа обслуживаемых КО, высот их орбит и различия их наклонений-затраты энергии и/или времени на обслуживание резко увеличиваются. Особенно это сказывается при выведении СО с Земли (отчего страдает и экологическая ситуация). При увеличении населенности низких орбит пространство существенно засоряется мусором.
При этом ясно, что если БО будет достаточно удалена от Земли, и на этой БО разместятся транспортно-технические центры (ТТЦ), описанные в [1], то затраты характеристической скорости на доставку СО с такой БО на обслуживаемые орбиты будут существенно ниже, чем с низких орбит, а для поддержания СО в состоянии готовности не потребуется постоянно выводить их с Земли или возвращать на Землю, т.к. функции ТТЦ станут со временем весьма основательными - они могут оказаться центральными звеньями космической инфраструктуры (наподобие ремонтных заводов и даже уникальных производств элементов, узлов и систем КО, в т.ч. из внеземных ресурсов, отработавших ИСЗ и т.д.), поддерживающими активность СО. Снабжение ТТЦ ресурсами не потребует жестких ограничений на время, и потребная энергетика будет не критичной (при использовании, например, ЭРД с ЯЭУ и т.п.).
Предлагаемая ВКИ для обслуживания КО 1 на орбите (a) включает в себя размещенные на БО (b) один или более орбитальных ТТЦ 2, а также СО и модульные МТА для доставки СО к обслуживаемым КО 1. БО выбрана экваториальной круговой или близкой к ней. МТА снабжены PC 3 для перевода МТА с БО (b) на эллиптическую промежуточную орбиту (S) и ДС 4 для перевода ПН на переходную орбиту (ƒ) к орбите (a) обслуживаемых КО. В номенклатуру МТА входят различные унифицированные, стыкуемыми друг с другом двигательные модули (ДМ), часть из которых имеют химические, а часть - электроракетные (например, СПД) двигатели.
В составе ТТЦ накапливается или производится множество структурно-функциональных элементов (СФЭ) для КО (системных модулей: структурных, энергетических, управляющих, топливно-двигательных, целевых, а также отдельных узлов и элементов) и сервисных модулей (стыковочных узлов, манипуляторов, баков, магистралей, разъемов и проч.). Для обеспечения обслуживания заданного КО (или нескольких) составляют СО в виде ПН, включающей требуемое подмножество СФЭ и сервисных модулей. ПН стыкуют с ДС 4 и PC 3.
Данную ПН (вместе с ДС) переводят посредством PC 3 на промежуточную орбиту S в плоскости БО с максимально высоким, насколько допускают сроки обслуживания заданных КО, апогеем (r a), в котором отделяют PC 3, и связку 5 ПН и ДС переводят с помощью ДС 4 на переходную орбиту ƒ того же наклонения (i), что и орбита а КО, и лежащую в плоскости, смещенной по ДВУ от плоскости орбиты КО на угол (ΔΩ<ΔΩ*), определяемый разностью регрессий линий узлов орбиты КО и переходной орбиты ƒ за время движения ПН по орбите ƒ от указанного апогея до сближения и встречи с КО.
Орбиты S и ƒ выбираются с условием обеспечения фазирования, т.е. согласования движения ПН и КО для их встречи на орбите a.
В момент старта ПН с PC и ДС в перигее орбиты S линия апсид орбиты S должна быть смещена от линии узлов орбиты а на величину ΔΩ* - ухода ДВУ орбиты а вследствие регрессии ее линии узлов за время перелета b → а (фиг.1).
После отделения PC 3 возвращается по нисходящей ветви орбиты S на БО. ДС 4 с сервисными модулями переводят по завершении обслуживания КО на БО с помощью двигателей малой тяги, например, СПД. При этом в ТТЦ могут доставляться отработанные элементы, узлы и системы обслуженных КО.
Для перевода ПН на орбиты S и ƒ используют двигатели большой тяги, например, ЖРД. Последние также могут использоваться для перевода ПН с орбиты ƒ на орбиту a и встречи с КО в перигее переходной орбиты ƒ посредством ДС 4. При достаточном располагаемом времени для перехода на орбиту a могут применяться двигатели ДС малой тяги, например, СПД, при этом переходная орбита ƒ превращается в оскулирующую, в плоскости которой создается тяга СПД. PC 3 возвращают с орбиты S на БО с помощью двигателей большой тяги, например, ЖРД.
На графиках фиг.2-3 суммарные затраты характеристической скорости на доставку СО с орбиты b на орбиту а оцениваются как ΔVа=ΔVbS+ΔVSa и отвечают гомановской схеме перелета с приложением в апогее (rа) импульса ΔVSƒ для поворота плоскости орбиты S на угол i и коррекции скорости для выхода на переходную орбиту ƒ. При р'<1 затраты ΔVσ возрастают более резко, что свидетельствует о предпочтительности БО более высокой, чем обслуживаемая (a).
Разность ΔVр=ΔVSa - ΔVSƒ характеризует энергетику перевода ПН с орбиты ƒ на орбиту а - либо импульсом в перигее, либо по траектории, формируемой двигателем малой тяги. Величина ΔVр постоянна по р' и мало меняется с изменением ra и наклонения i, находясь в пределах 0,2-0,3 Vp. Для орбит КО с р≥15000 км значения ΔVР≤1000-1500 м/с.
Переход с БО на промежуточную орбиту S также не требует значительной энергетики: ΔVbS ≈ 0,2 Vp - при р'>1. Для этого маневра можно применить PC 3 небольшой мощности, возвращаемую на БО.
Как видно из графиков, увеличение r а и высоты БО (параметра р') приводит к уменьшению энергетики маневров. Минимальная энергетика получается в «вырожденном» случае р'=r а, когда промежуточной орбиты S не требуется (и время перелета b → а также минимально). Однако в этом случае высота орбиты b может быть слишком большой (далеко за ГСО), что вызывает ряд очевидных проблем.
Вместе с тем, снижение ΔVσ с ростом р' не столь значительно, чтобы быть решающим фактором. В отличие от этого, времена перелетов МТА с ПН между орбитами b и а существенно зависят, прежде всего, от r а.
На фиг.4 показаны времена перелета b → a, которые складываются из времени движения от перигея к апогею орбиты S, от апогея до перигея орбиты ƒ и начального движения по некоторой дуге Δν БО, зависящей от положения СО (ПН с МТА) на БО в момент получения задания на обслуживание некоторых КО на орбите о (фиг.1). Если окажется, что СО в данный момент подходит близко к линии апсид орбиты S: Δν ≈ 0; π, то время перелета b → а будет минимальным Т ba min, если же СО уже пересекли линию апсид, то им придется совершить еще порядка пол-оборота по БО - до следующего подхода к линии апсид, и тем самым время перелета будет максимальным Т ba max. В диапазоне средних высот БО, при р' ≈ 1,5…2 разница между Т ba max и Т ba min составляет примерно 1…1,5 (Та) - периода обращения по орбите а.
Времена движения Тƒ по нисходящей ветви переходной орбиты ƒ составляют 1,15; 2,6 и 5,6 - для r а- 2,5; 3 и 5 соответственно. Если обслуживаемыми орбитами являются орбиты типа ГЛОНАСС/GPS с Та=11-12 час, то время Тƒ может достигать 2,5 сут и более.
Характеристическая скорость для перехода ƒ→ а выше оценена как ΔVp ~1000 м/с, так что можно оценить необходимую для этого перехода тяговооруженность: n* ≈ 0,0041-0,0045 м/с2, что на порядок меньше штатной тяговооруженности (отношения тяги к массе двигателя) n таких двигателей, как, например, модели СПД-230, 200, 140 (ОКБ «Факел»), для которых n ≈ 0,03-0,04 м/с2, ввиду чего масса двигателей составит лишь несколько более 10% массы МТА с ПН.
Удельный импульс данных СПД достигает 2000-3000 с. Поэтому применение таких двигателей малой тяги может оказаться желательным для перехода ƒ → а.
Промышленная применимость
Для осуществления предлагаемых изобретений не требуется принципиально новых теоретических представлений и разработок в области ракетно-космической техники; здесь могут быть использованы, в основном, традиционные и апробированные средства и методы построения космических систем и управления ими.
| название | год | авторы | номер документа |
|---|---|---|---|
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| Способ обслуживания искусственных спутников на средних и высоких околоземных орбитах | 2022 |
|
RU2774915C1 |
| Космическая обслуживающая система и способ ее функционирования | 2022 |
|
RU2771191C1 |
| Способ обслуживания системы спутников на околокруговых орбитах и космическая обслуживающая система для осуществления способа | 2022 |
|
RU2772498C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОРБИТУ | 2023 |
|
RU2794486C1 |
| СПОСОБ ПЕРЕФАЗИРОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОКОЛОЗЕМНОЙ ОРБИТЕ | 2023 |
|
RU2806928C1 |
| СПОСОБ МЕЖОРБИТАЛЬНОЙ ТРАНСПОРТИРОВКИ ПОЛЕЗНЫХ ГРУЗОВ | 2009 |
|
RU2404091C1 |
| КОСМИЧЕСКАЯ ОБСЛУЖИВАЮЩАЯ СИСТЕМА И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2013 |
|
RU2535760C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ ПРИ ПЕРЕЛЁТЕ КОСМИЧЕСКОГО КОРАБЛЯ С ОРБИТЫ ЛУНЫ НА ОРБИТУ ЗЕМЛИ | 2019 |
|
RU2725091C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2605463C2 |
Изобретения относятся к методам и средствам обслуживания спутниковых систем различного назначения, преимущественно в эпоху развитой активности в ближнем космосе, для которой характерно развертывание на БО транспортно-технических центров (ТТЦ). Способ обслуживания космических объектов (КО) на орбитах различного наклонения, включающий размещение на околоземной базовой орбите (БО) транспортно-технических центров (ТТЦ), средств обслуживания (СО) и модульных межорбитальных транспортных аппаратов (МТА) для доставки СО на орбиты обслуживаемых КО, взаимодействие СО и МТА с ТТЦ, перелеты МТА между БО и орбитами КО. В качестве БО используют высокую экваториальную орбиту, с которой переводят средства обслуживания (СО), формируемые ТТЦ, на более низкие орбиты обслуживаемых КО разного наклонения. Перевод СО осуществляют через эллиптическую промежуточную орбиту в плоскости БО с максимально высоким, допустимым по срокам обслуживания, апогеем. В апогее изменяют наклонение и величину скорости СО, переводя СО в плоскость орбиты КО. Дальнейший перелет к КО производят с помощью двигательных систем МТА большой или малой тяги. После обслуживания КО возвращают СО и часть отработанных элементов КО в ТТЦ на БО. Повышается оперативность обслуживания КО на средних и высоких орбитах любого наклонения. 2 н. и 8 з.п. ф-лы, 4 ил.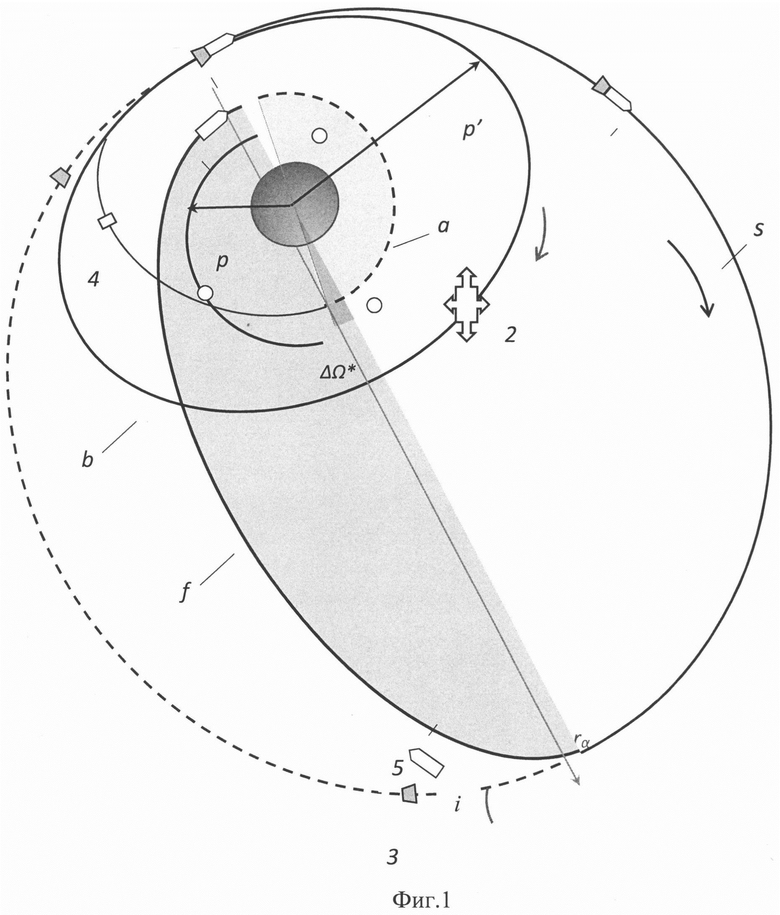
1. Способ обслуживания космических объектов (КО) на орбитах различного наклонения, включающий размещение на околоземной базовой орбите (БО) транспортно-технических центров (ТТЦ), средств обслуживания (СО) и модульных межорбитальных транспортных аппаратов (МТА) для доставки СО на орбиты обслуживаемых КО, взаимодействие СО и МТА с ТТЦ, перелеты МТА между БО и орбитами КО, отличающийся тем, что в качестве БО используют экваториальную круговую или близкую к ней орбиту, переводят СО с помощью разгонной ступени (PC) МТА на промежуточную орбиту в плоскости БО с максимально высоким, насколько допускают сроки обслуживания заданного КО, апогеем, в котором от МТА отделяют СО с доводящей ступенью (ДС) и переводят СО с помощью ДС на переходную орбиту того же наклонения (i), что и орбита КО, и лежащую в плоскости, смещенной по долготе восходящего узла (ДВУ) от плоскости орбиты КО на угол (ΔΩ), определяемый разностью регрессий линий узлов орбиты КО и переходной орбиты за время движения СО от указанного апогея до сближения и встречи с КО, переводят СО на орбиту КО, обеспечивая встречу с КО и его обслуживание, при этом МТА возвращается по нисходящей ветви промежуточной орбиты к БО, а ДС по завершении обслуживания КО возвращают на БО с помощью двигателей малой тяги, например стационарных плазменных двигателей (СПД).
2. Способ по п. 1, отличающийся тем, что БО расположена выше любой из орбит обслуживаемых КО.
3. Способ по п. 1 или 2, отличающийся тем, что СО составляют из структурно-функциональных элементов (СФЭ) КО, формируемых в ТТЦ, и сервисных модулей, возвращаемых на БО с помощью ДС.
4. Способ по любому из пп. 1-3, отличающийся тем, что СО на указанные промежуточную и переходную орбиты переводят с помощью двигателей большой тяги, например жидкостных реактивных двигателей (ЖРД).
5. Способ по любому из пп. 1-4, отличающийся тем, что перевод СО с переходной орбиты на орбиту КО и встречу с ним осуществляют в перигее переходной орбиты посредством двигателей ДС большой тяги, например ЖРД.
6. Способ по любому из пп. 1-4, отличающийся тем, что перевод СО с переходной орбиты на орбиту КО и встречу с ним осуществляют посредством двигателей ДС малой тяги, например СПД, создающих тягу в плоскости оскулирующей переходной орбиты.
7. Способ по любому из пп. 1-6, отличающийся тем, что МТА возвращают на БО с помощью двигателей указанной PC, причем PC оснащена двигателями большой тяги, например ЖРД.
8. Высокоорбитальная космическая инфраструктура для обслуживания КО на орбитах различного наклонения, включающая в себя размещенные на околоземной БО один или более орбитальных ТТЦ, СО и модульные МТА для доставки СО на орбиты обслуживаемых КО и возврата на БО, отличающаяся тем, что БО выбрана экваториальной круговой или близкой к ней, в состав МТА входят двигательные модули (ДМ), часть из которых имеют химические, а часть - электроракетные, например СПД, двигатели, причем из модулей МТА могут быть собраны PC для перевода СО с БО на эллиптические промежуточные орбиты, а также ДС для перевода СО на переходные орбиты к орбитам обслуживаемых КО и возвращения на БО.
9. Космическая инфраструктура по п. 8, отличающаяся тем, что БО расположена выше любой из орбит обслуживаемых КО.
10. Космическая инфраструктура по п. 8 или 9, отличающаяся тем, что СО получены в ТТЦ объединением структурно-функциональных элементов (СФЭ) КО, формируемых из доставляемых на ТТЦ материалов и изделий, и сервисных модулей, возвращаемых на БО с помощью ДС.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2014 |
|
RU2562908C2 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |
| US 6892986 B2, 17.05.2005 | |||
| Пакет пластинчатого теплообменного аппарата | 1977 |
|
SU673833A1 |

