Область техники
Изобретения относятся к обслуживанию систем искусственных спутников различного назначения (мониторинга, навигации, связи и др.), расположенных на орбитах, которые могут быть сгруппированы по признаку близости (или равенства) их наклонений (i).
Примерами таких спутниковых систем могут служить системы ГЛОНАСС или GPS (см. [1] GPS vs ГЛОНАСС: какая система лучше. 16.12.2016: https://gpsmarker.ru/info/blog/gps-vs-glonass-kakaya-sistema-luchshe.html). где используются однотипные орбиты с близкими наклонениями (64,3° или 63,6°). На каждой из орбит (числом 3 или 6) расположено по нескольку равномерно расставленных вдоль орбиты спутников (рабочее число 8 или 4).
Плоскости орбит этих спутниковых систем разнесены по долготе восходящего узла (ДВУ), образуя равномерную структуру вдоль экватора.
Подобное построение спутниковых систем удобно как с точки зрения их целевого назначения, так и обслуживания - последнее требует меньшего числа сервисных космических аппаратов (КА) и меньшей энергетики для перелетов к разным обслуживаемым спутникам (ОС). Под "обслуживанием" подразумеваются такие операции, как дозаправка, ремонт, инспекция, изъятие и т.п.
Средства обслуживания (СО), в частности, сервисные КА могут доставляться к обслуживаемым ИС с помощью межорбитальных транспортных аппаратов (МТА) с реактивными двигателями (ЖРД, плазменными, ионными и др.).
Предшествующий уровень техники При построении схем обслуживания спутниковых систем, подобных отмеченным выше, используется такое явление, как регрессия ДВУ (линии узлов), имеющая место для большинства орбит спутников (кроме полярных) вследствие нецентральности поля тяготения Земли. Угловая скорость регрессии  и на низких орбитах (где фокальный параметр р ~7000 км) достигает заметной величины: около 4° в сутки, а с увеличением высоты орбиты быстро убывает.
и на низких орбитах (где фокальный параметр р ~7000 км) достигает заметной величины: около 4° в сутки, а с увеличением высоты орбиты быстро убывает.
Данное явление используется при выборе орбит СО (МТА с сервисными КА) - так, чтобы их наклонения были одинаковы или близки к наклонениям орбит ОС, а фокальные параметры р орбит ОС отличались от таковых для орбит СО, что приводит к совмещению плоскостей орбит ОС и СО за счет различных скоростей изменения ДВУ тех и других.
Подобный подход отражен, например, в патентах RU 2688120 C1, RU 2220886 С2, US 8016240 В2 и позволяет существенно уменьшить затраты характеристической скорости (ХСК) на маневры СО. Однако сам процесс совмещения плоскостей орбит ОС и СО может занять значительное время (особенно если эти орбиты близки по параметрам р и i).
Известно размещение вспомогательных или резервных спутников на синхронно прецессирующих (с той же угловой скоростью Ω', что и у орбит основных спутников) орбитах, отличающихся друг от друга по тем или иным орбитальным элементам (эксцентриситету, аргументу перигея, наклонению): US 5999127 A, US 6892986 В2 и др.
Такие приемы повышают эффективность (гибкость) функционирования системы основных спутников, но не дают преимуществ по потребной ХСК для перелетов между орбитами ОС и орбитами СО - при существенном несовпадении данных орбит по ДВУ.
Наиболее близкими к предлагаемым изобретениям являются способ обслуживания системы спутников и космическая обслуживающая система (КОС) для реализации способа, описанные в пат. [2] RU 2535760 С1.
Известный способ [2] включает размещение СО на БО с одинаковой скоростью регрессии линии узлов и доставку СО с этих орбит к ОС.
Известная КОС [2] содержит СО спутников, размещенные на нескольких БО с одинаковой скоростью регрессии линии узлов, и средства доставки СО с БО к ОС.
Недостатком известных способа и КОС [2] является то, что они не обеспечивают, вообще говоря, одинаково оперативного обслуживания спутников, необходимость которого может возникнуть в любые, заранее не известные моменты времени и для заранее не известных ОС - при ограниченной энергетике маневров.
Сущность изобретений
Задачей предлагаемых изобретений является устранение указанного выше недостатка путем обеспечения более равномерного по времени уровня оперативности обслуживания спутников на околокруговых, распределенных произвольным образом по ДВУ орбитах при приемлемых и сравнимых затратах ХСК для каждого из обслуживаний.
Техническим результатом является обеспечение одинакового уровня оперативности обслуживаний ОС в течение всего времени существования системы ОС - при приемлемых и сравнимых затратах ХСК для каждого из обслуживаний.
Решение поставленной задачи, с получением указанного технического результата достигается тем, что в способе, включающем размещение СО на БО с одинаковой скоростью регрессии линии узлов и доставку СО с этих орбит к ОС - БО с одинаковым наклонением распределяют по долготе восходящего узла (ДВУ) Ω так, чтобы разность δΩ (t) между ДВУ любой орбиты ОС и ближайшей к ней по ДВУ БО в любой момент (t) удовлетворяла условию: δΩ(t)≤ΔΩ,*, а наклонение (i) БО выбирают отличным от наклонений орбит ОС на величину Δi<Δi*, где Δi* - изменение наклонения БО при коррекции ДВУ этой орбиты на величину ΔΩ*, причем указанная коррекция включает перевод СО с БО в ее плоскости на вытянутую эллиптическую промежуточную орбиту (ПРО) с аргументом перигея, равным 90°, и приложение в апогее ПРО нормального импульса скорости для изменения плоскости ПРО на угол (α*), при котором ДВУ изменится на ΔΩ*(α*), а наклонение - на угол Δi*(α*), при этом с момента (t0) начала доставки СО к одному или более ОС на их орбите проводят описанную выше коррекцию ДВУ БО, ближайшей к орбите ОС и смещенной от нее по ДВУ на δΩ(t0)≤ΔΩ*, изменяя в апогее ПРО ее плоскость на угол (α), при котором ДВУ изменится на δΩ(α) ≈ δΩ(t0), а наклонение - на угол δi(α) ≈ Δi, получая в результате достаточно точное совпадение плоскости ПРО с плоскостью орбиты ОС, после чего проводят маневры сближения и встречи СО с одним или более ОС, а по окончании обслуживания ОС возвращают СО на БО.
В предпочтительном варианте, БО распределяют равномерно по ДВУ в области этих орбит:  где
где  отсчитывается от линии узлов любой из орбит ОС, а число БО в указанной области определяют из условия δΩ(t)≤ΔΩ*, причем вне данной области для обслуживания соответствующей орбиты ОС используют БО с ДВУ, равной 180°- δΩ(t), которую предварительно модифицируют путем изменения орбитального движения СО с прямого на обратное, а наклонения - с i на 180°-i.
отсчитывается от линии узлов любой из орбит ОС, а число БО в указанной области определяют из условия δΩ(t)≤ΔΩ*, причем вне данной области для обслуживания соответствующей орбиты ОС используют БО с ДВУ, равной 180°- δΩ(t), которую предварительно модифицируют путем изменения орбитального движения СО с прямого на обратное, а наклонения - с i на 180°-i.
При этом указанная модификация БО включает перевод СО с БО в ее плоскости на вытянутую эллиптическую орбиту с аргументом перигея, равным 0° или 180°, и приложение в ее апогее импульса скорости для указанных изменений наклонения i и направления орбитального движения.
Предпочтительно, указанную разность наклонений БО и орбит ОС выбирают равной Δi=Δi*/2.
Решение поставленной задачи, с получением указанного технического результата достигается также тем, что в КОС, содержащей СО спутников, размещенные на нескольких БО с одинаковой скоростью регрессии линии узлов, и средства доставки СО с БО к ОС - БО с одинаковым наклонением распределены равномерно по ДВУ (Ω) так, чтобы разность bΩ(t) между ДВУ любой орбиты ОС и ближайшей к ней по ДВУ БО в любой момент (t) не превышала заданного значения ΔΩ*, причем выбором ΔΩ* и наклонения (i) БО обеспечивают оптимальную по оперативности обслуживания ОС и затратам ХСК коррекцию БО для совмещения их плоскостей с плоскостями орбит ОС, при этом СО снабжены модульными МТА с двигателями большой и малой тяги, способными выводить СО на вытянутые эллиптические орбиты, сообщать СО в апогее этих орбит импульс скорости порядка 1-2 величины орбитальной скорости в апогее и возвращать СО на БО.
Перечень фигур
Существо предлагаемых изобретений поясняется нижеследующим детальным описанием примеров их осуществления с прилагаемыми чертежами, на которых изображены:
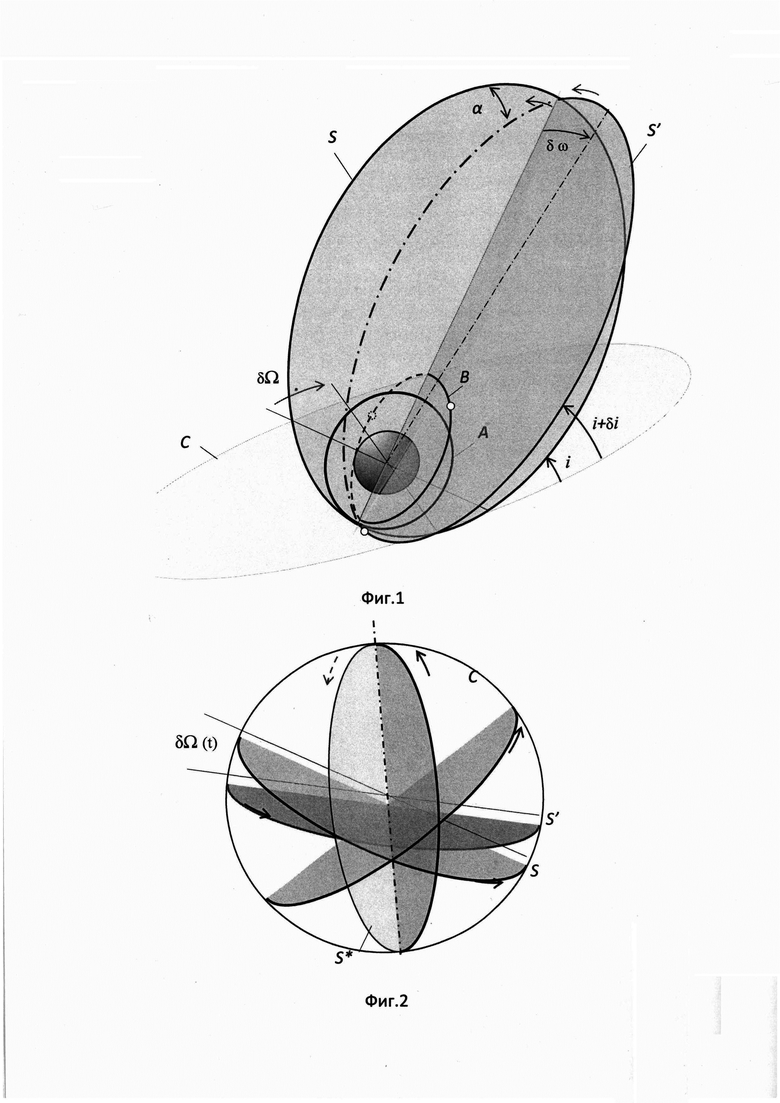
Фиг. 1 - схема коррекции ПРО (S → S'), с изменением ДВУ δΩ(α) и наклонения δi(α) для совмещения плоскости ПРО (S') с плоскостью орбиты ОС (В);
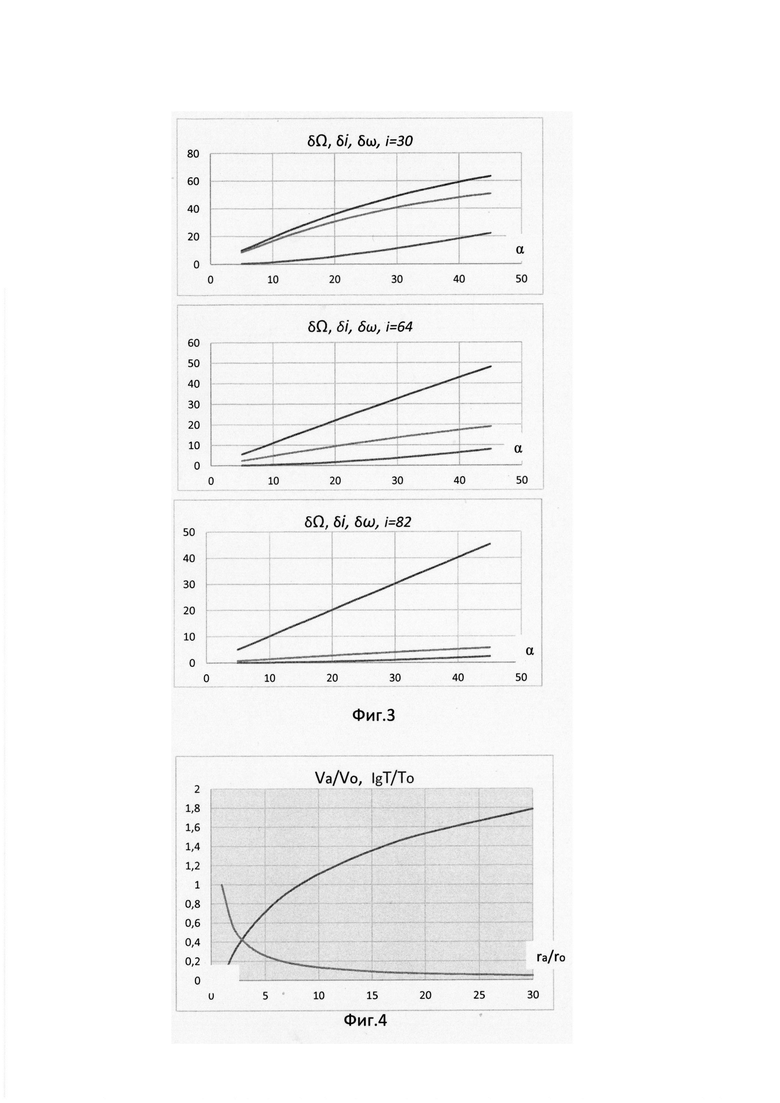
Фиг. 2 - пример исходной структуры ПРО (в плоскостях БО) и возможного положения скорректированной ПРО (в плоскости орбиты ОС); стрелками показаны направления орбитального движения (вид со стороны полюса);
Фиг. 3 - зависимости изменения ДВУ (δΩ), наклонения (δi) и аргумента перицентра (δω) от угла (α) между плоскостями орбит S и S' для разных наклонений орбиты S;
Фиг. 4 - зависимости орбитальной скорости Va в апогее ПРО и периода обращения Т по данной орбите от радиуса апогея ra; значения этих параметров отнесены, соответственно, к V0, Т0, r0 - параметрам на БО.
Раскрытие и примеры осуществления изобретений
Орбиты (B) ОС могут быть любыми, но предпочтительно достаточно высокими (что отвечает также требованиям радиационной безопасности), и располагаться произвольным образом вдоль экватора (по ДВУ).
Предлагаемая КОС состоит из БО (А), желательно также достаточно высоких, с одинаковым наклонением (i), близким к среднему наклонению орбит ОС. БО имеют одну и ту же скорость регрессии линии узлов и равномерно расставлены вдоль экватора, причем их число и, соответственно, углы между линиями узлов выбираются из условия «досягаемости за один маневр» ОС, местоположение которого заранее не известно (маневр включает выведение СО на ПРО, коррекцию ПРО в апогее и перевод СО с ПРО на орбиту ОС - согласно орбитальной схеме на фиг. 1).
Упомянутое условие состоит в том, чтобы линия узлов любой орбиты В отстояла в любой момент (t) от ближайшей к ней линии узлов некоторой БО на угол δΩ(t)≤ΔΩ*, где ΔΩ* - максимально допустимая коррекция ДВУ БО, обеспечивающая совмещение плоскости ПРО S с плоскостью S' и перелет на орбиту В к ОС за минимальное время при заданной ХСК на маневр (или - наоборот). Например, в КОС согласно фиг. 2 угол ΔΩ*=30°, т.к. плоскости трех БО (или, что тоже, ПРО S) разбивают экваториальную плоскость С на шесть секторов по 60°, а плоскость любой орбиты В (или S') попадает в одну из пар противоположных секторов.
Если плоскости орбит В и А прецессируют друг относительно друга, то со временем направления орбитального движения некоторых соседних орбит В и А могут стать противоположными, т.е. их ДВУ будут отличаться на 180° - δΩ(t), а наклонения - на угол 180°-2i. В этом случае обслуживание по принятой схеме (фиг. 1) практически невозможно.
Выход из положения может состоять в увеличении числа БО примерно в два раза, но это значительно увеличит потребное количество СО. Более желательным представляется модификация БО так, чтобы в определенные эпохи одновременно изменялось направление орбитального движения и наклонение БО (как это показано на фиг. 2 для орбит S и S*). Если орбиты А и В достаточно высоки и близки по параметру р, то относительная прецессия их плоскостей будет весьма мала, и данная модификация будет производиться редко, а потребная ХСК будет невелика (см. ниже).
Таким образом, КОС с небольшим числом БО (и, соответственно, СО) будет иметь скачкообразно меняющуюся структуру.
При каждом обслуживании СО выводится с БО (А) на эллиптическую ПРО (S) с аргументом перигея ω=π/2 (радиус-вектор апогея ra перпендикулярен линии узлов). В апогее прикладывают нормальный импульс скорости ΔV0 для изменения плоскости ПРО на угол α, при котором ДВУ изменится на δΩ (α), а наклонение - на угол δi(α). Из сферической тригонометрии можно получить необходимые соотношения:

где i'=i+δi. Видно, что при малых α и для околополярных орбит (i ≈ π/2): δΩ ≈ α, δω ≈ 0, i' ≈ i, т.е. меняется только Ω. Для любых значений α зависимости приведены на графиках фиг. 3, и при планировании маневров обслуживания спутников следует учитывать изменения всех трех орбитальных элементов (Ω, i, ω).
Из зависимостей фиг. 4 можно выбрать радиус апогея ra, при котором скорость Va в апогее ПРО и период обращения Т по ПРО будут в каком-то смысле оптимальны: величина импульса |ΔVa| для перехода на орбиту S', равная 2Vasin α/2 ≈ Vaα - достаточно мала, а время перелета А→В, равное ≈ Т, является заданным или допустимым (или - наоборот: Т → min, a |ΔVa| - задана).
Например, при (а): ra=7 Va=0,2, Т=8; при (b): r а=5 Va=0,25, Т=5. Если высота БО ≈ 6000 км, δΩ=ΔΩ*=30°, i=64°, то в случае (a): |ΔV0| ≈ 270 м/с и Т ≈ 28 час; в случае (b): |ΔV0| ≈ 340 м/с и Т ≈ 18 час и т.д. Таким образом, затраты ХСК и сроки доставки СО к ОС вполне приемлемы.
Поскольку при коррекции ПРО в апогее меняются как ДВУ, так и наклонение (фиг. 1, 3), то БО (А) следует выбирать с наклонением (i), отличным от наклонений орбит ОС (В) на некоторую, заранее не известную, величину Δi<Δi*, где Δi* - изменение наклонения БО при коррекции ДВУ этой орбиты на величину ΔΩ*. Поскольку изменения δi(α) обычно невелики (при α ~ 30°), то можно принять просто Δi=Δi*/2 (см. фиг. 3).
Изменение δω(α) при i≥64° относительно невелико, и поправку на него также можно вводить заранее, либо учитывать при фазировании.
Таким образом в процессе маневра доставки СО к ОС по схеме фиг. 1 получают достаточно точное совпадение плоскости ПРО (S') с плоскостью орбиты ОС (В), после чего проводят операции сближения и встречи СО с одним или более ОС, а по окончании обслуживания ОС возвращают СО на БО.
Для орбитальных маневров СО служат модульные МТА с двигателями большой и малой тяги. При выводе СО на вытянутые эллиптические орбиты, сообщении СО в апогее этих орбит корректирующего импульса скорости и выводе на орбиты ОС (В) - целесообразно использовать двигатели большой тяги. При возвращении МТА и СО на БО (А) предпочтительны двигатели малой тяги, т.к. здесь нет существенных ограничений на время маневра.
Как уже говорилось выше, КОС с небольшим числом БО должна иметь переменную структуру, меняя время от времени на обратное направление орбитального движения некоторых БО (т.е. - ДВУ этих орбит на 180°) и их наклонения (с i на 180°-i), - см. фиг. 2 (орбиты S и S*).
В соответствии с этим, БО распределяют равномерно по ДВУ в экваториальной области:  , где
, где  отсчитывается от линии узлов любой из орбит ОС (б). Число БО в данной области определяется условием δΩ(t)≤ΔΩ*. При выходе какой-либо БО из этой области проводят модификацию этой БО с указанным выше изменением наклонения и направления движения.
отсчитывается от линии узлов любой из орбит ОС (б). Число БО в данной области определяется условием δΩ(t)≤ΔΩ*. При выходе какой-либо БО из этой области проводят модификацию этой БО с указанным выше изменением наклонения и направления движения.
Модификация БО включает перевод СО с БО в ее плоскости на эллиптическую орбиту с ω=0° или 180° (т.е. с линией апсид, лежащей в плоскости экватора С) и приложение в ее апогее импульса скорости для указанных изменений наклонения i и направления орбитального движения.
Импульс скорости легко оценить как  где Vα - скорость в апогее. Например, при i=64° ΔVα=1,8 Vα. При радиусах апогея того же порядка, что и для орбит S, импульсы ΔVα невелики: в вышеприведенных примерах для БО высотой 6000 км, при ra=5,7,10 получим соответственно ΔVα=612, 486, 362 м/с. Впрочем, для модификации БО возможно применение и двигателей малой тяги.
где Vα - скорость в апогее. Например, при i=64° ΔVα=1,8 Vα. При радиусах апогея того же порядка, что и для орбит S, импульсы ΔVα невелики: в вышеприведенных примерах для БО высотой 6000 км, при ra=5,7,10 получим соответственно ΔVα=612, 486, 362 м/с. Впрочем, для модификации БО возможно применение и двигателей малой тяги.
Промышленная применимость
Для осуществления предлагаемых изобретений не требуется принципиально новых теоретических представлений и разработок в области ракетно-космической техники; здесь могут быть использованы, в основном, традиционные и апробированные средства и методы построения космических систем и управления ими.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обслуживания космических объектов на орбитах различного наклонения и высокоорбитальная космическая инфраструктура для реализации способа | 2022 |
|
RU2775039C1 |
| Космическая обслуживающая система и способ ее функционирования | 2022 |
|
RU2771191C1 |
| Способ обслуживания искусственных спутников на средних и высоких околоземных орбитах | 2022 |
|
RU2774915C1 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| КОСМИЧЕСКАЯ ОБСЛУЖИВАЮЩАЯ СИСТЕМА И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2013 |
|
RU2535760C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ И НАБЛЮДЕНИЯ | 2009 |
|
RU2396187C1 |
| СПОСОБ И СИСТЕМА ВЫВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТУ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ, ОБЛАДАЮЩИХ БОЛЬШИМ УДЕЛЬНЫМ ИМПУЛЬСОМ | 1997 |
|
RU2212363C2 |
| Способ определения последовательности перелётов между объектами космического мусора при значительном отличии в долготе восходящего узла их орбит | 2018 |
|
RU2688120C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА НЕ ЯВЛЯЮЩИЕСЯ КОМПЛАНАРНЫМИ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ СИЛЬНО ЭКСЦЕНТРИЧЕСКИХ ОРБИТ И АТМОСФЕРНОГО ТОРМОЖЕНИЯ | 1997 |
|
RU2220886C2 |
Изобретения относятся к обслуживанию систем искусственных спутников (ИС) различного назначения, расположенных на орбитах, которые могут быть сгруппированы по признаку близости их наклонений (i). Способ обслуживания системы спутников на околокруговых орбитах заключается в том, что БО с одинаковым наклонением распределяют по долготе восходящего узла (ДВУ) Ω так, чтобы разность δΩ(t) между ДВУ любой орбиты ОС и ближайшей к ней по ДВУ БО в любой момент (t) удовлетворяла условию: 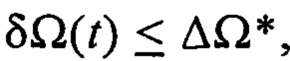 а наклонение (t) БО выбирают отличным от наклонений орбит ОС на величину Δi<Δi*, где Δi* - изменение наклонения БО при коррекции ДВУ этой орбиты на величину ΔΩ*. Причем указанная коррекция включает перевод СО с БО в ее плоскости на вытянутую эллиптическую промежуточную орбиту (ПРО) с аргументом перигея. В результате достаточно точное совпадение плоскости ПРО с плоскостью орбиты ОС, после чего проводят маневры сближения и встречи СО с одним или более ОС, а по окончании обслуживания ОС возвращают СО на БО. Обеспечивается оперативность обслуживаний системы искусственных спутников. 2 н. и 3 з.п. ф-лы, 4 ил.
а наклонение (t) БО выбирают отличным от наклонений орбит ОС на величину Δi<Δi*, где Δi* - изменение наклонения БО при коррекции ДВУ этой орбиты на величину ΔΩ*. Причем указанная коррекция включает перевод СО с БО в ее плоскости на вытянутую эллиптическую промежуточную орбиту (ПРО) с аргументом перигея. В результате достаточно точное совпадение плоскости ПРО с плоскостью орбиты ОС, после чего проводят маневры сближения и встречи СО с одним или более ОС, а по окончании обслуживания ОС возвращают СО на БО. Обеспечивается оперативность обслуживаний системы искусственных спутников. 2 н. и 3 з.п. ф-лы, 4 ил.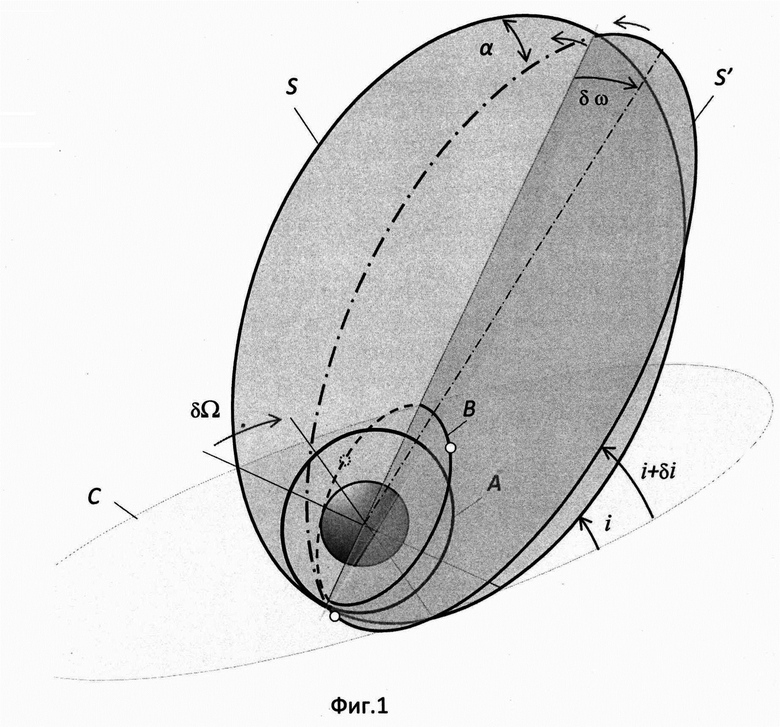
1. Способ обслуживания системы спутников на околокруговых орбитах, включающий размещение средств обслуживания (СО) на базовых орбитах (БО) с одинаковой скоростью регрессии линии узлов и доставку СО с этих орбит к обслуживаемым спутникам (ОС), отличающийся тем, что БО с одинаковым наклонением распределяют по долготе восходящего узла (ДВУ) Ω так, чтобы разность δΩ(t) между ДВУ любой орбиты ОС и ближайшей к ней по ДВУ БО в любой момент (t) удовлетворяла условию:  а наклонение (t) БО выбирают отличным от наклонений орбит ОС на величину Δi<Δi*, где Δi* - изменение наклонения БО при коррекции ДВУ этой орбиты на величину ΔΩ*, причем указанная коррекция включает перевод СО с БО в ее плоскости на вытянутую эллиптическую промежуточную орбиту (ПРО) с аргументом перигея, равным 90°, и приложение в апогее ПРО нормального импульса скорости для изменения плоскости ПРО на угол (α*), при котором ДВУ изменится на ΔΩ*(α*), а наклонение - на угол Δi*(α*), при этом с момента (t0) начала доставки СО к одному или более ОС на их орбите проводят описанную выше коррекцию ДВУ БО, ближайшей к орбите ОС и смещенной от нее по ДВУ на
а наклонение (t) БО выбирают отличным от наклонений орбит ОС на величину Δi<Δi*, где Δi* - изменение наклонения БО при коррекции ДВУ этой орбиты на величину ΔΩ*, причем указанная коррекция включает перевод СО с БО в ее плоскости на вытянутую эллиптическую промежуточную орбиту (ПРО) с аргументом перигея, равным 90°, и приложение в апогее ПРО нормального импульса скорости для изменения плоскости ПРО на угол (α*), при котором ДВУ изменится на ΔΩ*(α*), а наклонение - на угол Δi*(α*), при этом с момента (t0) начала доставки СО к одному или более ОС на их орбите проводят описанную выше коррекцию ДВУ БО, ближайшей к орбите ОС и смещенной от нее по ДВУ на  изменяя в апогее ПРО ее плоскость на угол (α), при котором ДВУ изменится на
изменяя в апогее ПРО ее плоскость на угол (α), при котором ДВУ изменится на  а наклонение - на угол
а наклонение - на угол  получая в результате достаточно точное совпадение плоскости ПРО с плоскостью орбиты ОС, после чего проводят маневры сближения и встречи СО с одним или более ОС, а по окончании обслуживания ОС возвращают СО на БО.
получая в результате достаточно точное совпадение плоскости ПРО с плоскостью орбиты ОС, после чего проводят маневры сближения и встречи СО с одним или более ОС, а по окончании обслуживания ОС возвращают СО на БО.
2. Способ по п. 1, отличающийся тем, что БО распределяют равномерно по ДВУ в области этих орбит:  где
где  отсчитывается от линии узлов любой из орбит ОС, а число БО в указанной области определяют из условия
отсчитывается от линии узлов любой из орбит ОС, а число БО в указанной области определяют из условия  причем вне данной области для обслуживания соответствующей орбиты ОС используют БО с ДВУ, равной 180° - δΩ (t), которую предварительно модифицируют путем изменения орбитального движения СО с прямого на обратное, а наклонения - с i на 180°-i.
причем вне данной области для обслуживания соответствующей орбиты ОС используют БО с ДВУ, равной 180° - δΩ (t), которую предварительно модифицируют путем изменения орбитального движения СО с прямого на обратное, а наклонения - с i на 180°-i.
3. Способ по п. 2, отличающийся тем, что указанная модификация БО включает перевод СО с БО в ее плоскости на вытянутую эллиптическую орбиту с аргументом перигея, равным 0° или 180°, и приложение в ее апогее импульса скорости для указанных изменений наклонения i и направления орбитального движения.
4. Способ по п. 1, отличающийся тем, что указанную разность наклонений БО и орбит ОС выбирают равной Δi=Δi*/2.
5. Космическая обслуживающая система для осуществления способа по любому из пп. 1-4, содержащая СО спутников, размещенные на нескольких БО с одинаковой скоростью регрессии линии узлов, и средства доставки СО с БО к обслуживаемым спутникам (ОС), отличающаяся тем, что БО с одинаковым наклонением распределены равномерно по ДВУ (Ω) так, чтобы разность δΩ(t) между ДВУ любой орбиты ОС и ближайшей к ней по ДВУ БО в любой момент (t) не превышала заданного значения ΔΩ*, причем выбором ΔΩ* и наклонения (i) БО обеспечивают оптимальную по оперативности обслуживания ОС и затратам ХКС коррекцию БО для совмещения их плоскостей с плоскостями орбит ОС, при этом СО снабжены модульными межорбитальными транспортными аппаратами (МТА) с двигателями большой и малой тяги, способными выводить СО на вытянутые эллиптические орбиты, сообщать СО в апогее этих орбит импульс скорости порядка 1-2 величины орбитальной скорости в апогее и возвращать СО на БО.
| КОСМИЧЕСКАЯ ОБСЛУЖИВАЮЩАЯ СИСТЕМА И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2013 |
|
RU2535760C1 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2014 |
|
RU2562908C2 |
| US 5669585 A1, 23.09.1997 | |||
| US 5267167 A1, 30.11.1993 | |||
| US 6892986 B2, 17.05.2005. | |||

