Изобретение относится к области компьютерных сетевых технологий, а именно к платформам для построения систем управления, передачи и обработки данных в вычислительных сетях.
Подобные системы снабжены стандартным набором функций:
- поддержки существующих и разрабатываемых сетевых протоколов в сервис-ориентированном стеке программного обеспечения,
- системы управления непосредственно устройством так и другими, поддерживающими технологию SDN,
- информационной безопасности – выявления потенциально опасного трафика на основе сигнатурного анализа, машинного обучения и искусственного интеллекта, принятия решения о его блокировке на основе гибкой системы правил,
- обработки потока данных на вычислительных ядрах общего и специализированного назначения, программируемых логических интегральных схемах (ПЛИС, FPGA), на интегральных схемах специального назначения (ASIC) и их комбинаций.
Из уровня техники известна платформа для построения систем управления, передачи и обработки данных в вычислительных сетях (RU 2635896 C1, 16.11.2017), содержащая базовый вычислительный блок, построенный на микропроцессоре с архитектурой ARM, блок питания, блок интерфейсов, по меньшей мере один построенный на микропроцессоре с архитектурой ARM вычислительный модуль и один или более модулей на базе ПЛИС. Для образования многопроцессорной конфигурации используется шина стандарта CompactPCI Serial.
Недостатки такой платформы заключаются в ограничении по количеству подключаемых модулей и блоков, отсутствии возможности ее конфигурации в зависимости от количества подключенных блоков и модулей, использовании только CompactPCI Serial для объединения компонентов, наличии сложного способа охлаждения. Данное решение выбрано в качестве прототипа.
Задачей изобретения является создание платформы для построения систем управления, передачи и обработки данных в вычислительных сетях, лишенной недостатков прототипа, предоставляющей возможность пользователям изменять структуру и конфигурацию под различные сценарии применения без проектирования и обладающей повышенной надежностью.
Технический результат заключается в повышении гибкости платформы для построения систем управления, передачи и обработки данных за счет возможности изменения ее конфигурации и распределения вычислительной нагрузки по имеющимся компонентам.
Указанный результат достигается в платформе для построения систем управления, передачи и обработки данных в вычислительных сетях, содержащей базовый вычислительный блок, построенный на микропроцессоре с архитектурой ARM, блок питания и блок интерфейсов, за счет того, что базовый блок имеет микросервисную среду функционирования программных модулей, выполняющих сетевые и пользовательские функций, а также функции системы управления. Базовый блок посредством упомянутой системы управления выполнен с возможностью следующего:
определения наличия подключения по меньшей мере одного коммутационного блока и определения содержания в нем одной или нескольких ПЛИС и одной или нескольких ASIC, далее при наличии подключения выдачи сообщения оператору о возможности их применения, затем задания топологии по указанной оператором конфигурации,
определения наличия подключения к коммутационному блоку блока вычислительных модулей, содержащего установленные на материнской плате коммутационную матрицу и по меньшей мере один построенный на микропроцессоре с архитектурой ARM вычислительный модуль с микросервисной средой функционирования программных модулей, далее при наличии подключения выдачи сообщения оператору о возможности применения модулей, затем задания топологии по указанной оператором конфигурации, а при наличии в подключенном блоке двух вычислительных модулей резервирования на них системы управления.
Предпочтительно, чтобы базовый блок посредством системы управления был выполнен с возможностью осуществления проверки работоспособности программных модулей в микросервисной среде на подключенных вычислительных модулях и базовом блоке, и в случае обнаружения неисправности в работе программных модулей осуществления перезапуска блока или соответствующих одного или нескольких модулей, а если неисправность заключается в работоспособности соответствующих одного или нескольких вычислительных модулей, то выполнения разворачивания работы программных модулей на других одном или нескольких вычислительных модулях и выдачи сообщения оператору о соответствующей неисправности.
Дополнительно базовый блок посредством системы управления выполнен с возможностью осуществления проверки работоспособности подключенного по меньшей мере одного коммутационного блока и при обнаружении его неисправности выдачи соответствующего сообщения пользователю.
Базовый блок посредством системы управления преимущественно выполнен с возможностью осуществления проверки работоспособности содержащихся в коммутационном блоке одной или нескольких ПЛИС и/или одной или нескольких ASIC и при обнаружении неисправности выдачи соответствующего сообщения пользователю.
Как правило, базовый блок посредством системы управления выполнен с возможностью определения подключения к блоку интерфейсов других платформ и в случае наличия подключения формирования единой распределенной системы управления, передачи и обработки данных в вычислительных сетях.
За счет базового вычислительного блока, способного с помощью системы управления задавать топологию платформы по указанной оператором конфигурации в зависимости от количества подключенных коммутационных блоков и вычислительных модулей, достигается заявленный технический результат. Гибкость в данном случае – это и есть возможность оперативно менять конфигурацию, добавлять или удалять элементы, возможность менять структуру устройства за счет задания топологии без изменения аппаратной части.
Причем дополнительная способность в случае сбоя программного модуля в микросервисной среде выполнять перезапуск компонента, на котором произошел сбой, а в случае отказа одного из компонентов распределять нагрузку по оставшимся, позволяет обеспечить отказоустойчивость платформы.
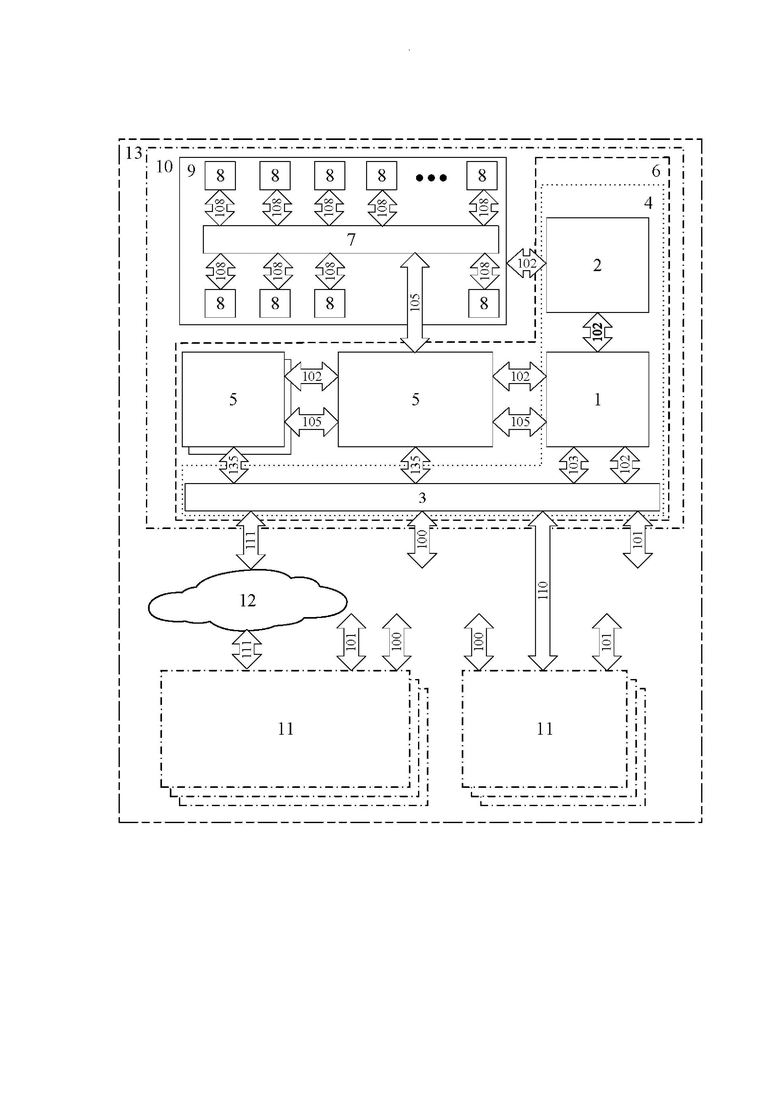
Предлагаемое изобретение поясняется с помощью фигуры, показывающей блок-схему, на которой позициями показаны следующие элементы:
1 – базовый вычислительный блок;
2 – блок питания;
3 – блок интерфейсов и управления платформой;
4 – минимально возможная конфигурация платформы класса «Маршрутизатор» (router);
5 – коммутационный блок;
6 – платформа класса «Маршрутизатор» (router) с увеличенной портовой оснащенностью, аппаратными ускорителями на ASIC и ПЛИС.
7 – коммутационная матрица;
8 – вычислительный модуль;
9 – блок вычислительный модулей
10 – платформа в расширенном оснащении;
11 – другие платформы для системы управления, передачи и обработки данных в вычислительных сетях;
12 – сеть общего пользования;
13 – кластер из систем управления, передачи и обработки данных в вычислительных сетях предприятия;
100 – Ethernet каналы от внешних потребителей, например серверы, рабочие станции, системы видеонаблюдения и других, подключаемых к блоку интерфейсов;
101 – Ethernet, USB и/или RS-232 канал управления платформой через канал 103 соединен с блоком 1. Применяется там, где используется отдельный изолированный контур управления сетевыми устройствами.
102 – шины питания различного напряжения и мощности, линии управления блоком питания (логические и PMBus);
103 – Ethernet, USB и RS-232 каналы от блока 1 к блоку 3 для подключения внешних потребителей по каналам 100, 101, 110, 111;
105 – PCIe, Ethernet, USB, UART, SPI, I2C, GPIO каналы от блока 1 к одному или нескольким блокам 5 и блоку 9 (при их наличии);
108 – каналы данных, формируемые коммутационной матрицей по заданной проблемно-ориентированной конфигурации, между блоками 8 и через каналы 105 с блоками 1, 5, и каналы 135 с блоком 3;
110 – каналы, соединяющие платформы в кластер 13 в пределах действия корпоративной доверенной сети предприятия
111 – защищенные криптографическим способом каналы для передачи информации через сети общего пользования, соединяющие платформы в кластер 13;
135 – каналы от блока(ов) 5 к блоку 3 для подключения внешних потребителей.
Платформа для построения систем управления, передачи и обработки данных в вычислительных сетях включает базовый вычислительный блок 1, имеющий необходимый набор оперативной и долговременной энергонезависимой памяти и построенный на микропроцессоре с архитектурой ARM, в частности, на микропроцессоре Baikal BE-M1000, также возможно применение других процессоров с архитектурой ARM, как российского, так и иностранного производства, блок питания 2 заданной мощности и блок интерфейсов 3, к которому осуществляется подключение внешних каналов данных и управления 100, 101, 110, 111. Блок 3 может обеспечивать управление питанием системы, её сброса и отображения информации на световых, цифробуквенных индикаторах или графических экранах.
Выбор в пользу ARM определен наличием встроенных в процессор большого количества разновидностей высокоскоростных интерфейсов (PCIe, Ethernet, USB, SPI) и существованием специализированных процессоров со специализированными блоками обработки данных и сетевых пакетов.
На базовом блоке 1 развернута микросервисная среда функционирования программных модулей, выполняющих сетевые и пользовательские функций. Одним из таких модулей является система управления, которая состоит из:
– программного интерфейса приложения (англ. application programming interface, API) через который осуществляется взаимодействие между программными компонентами;
– планировщика, осуществляющего запуск и контроль состояния контейнеризированного приложения на доступном ресурсе базового блока 1 и/или вычислительных модулей 8, как на конкретной платформе, например, в оснащении 10, так и в кластере 13 платформ;
– контроллера, осуществляющего мониторинг состояния приложений, запущенных в микросервисной виртуализированный среде, как на конкретной платформе, например, в оснащении 10, так и в кластере 13 платформ;
– подсистемы хранения конфигурации и данных;
– интерфейса командной строки (сommand line interface, CLI);
– графического интерфейса пользователя (graphical user interface, GUI);
– других программных модулей, необходимых для функционирования программных и аппаратных компонентов системы.
Базовый блок 1 с помощью системы управления обеспечивает первоначальное конфигурирование платформы в любом оснащении 4, 6 или 10 при первом включении, обнаружение изменений в составе аппаратных компонентов и программных блоков с последующим гибким переконфигурированием платформы с учетом новых условий и отображением данного процесса в интерфейсе управления. Так, при появлении новых коммутационных блоков 5 оператор конфигурирует платформу для их использования. При добавлении дополнительных вычислительных модулей 8 в виде дополнительных вычислительных ресурсов, оператор настраивает платформу на их использование.
Также система управления поддерживает технологию SDN (software-defined networking), посредством которой возможно конфигурировать коммутационные матрицы основной платформы (например, 10) а также платформ, входящих в кластер 13. Система управления осуществляет задание топологии по указанной оператором конфигурации, а также использует новые ресурсы для повышения надежности платформы или кластера 13 в автоматическом режиме.
Кроме того, на базовом блоке 1 функционируют необходимые сетевые сервисы для устройства класса «Маршрутизатор» (router), что достаточно для работоспособности в оснащении 4.
Расширение портовой емкости и функционала платформы (например, в оснащении 6) обеспечивается за счет одного или нескольких коммутационных блоков 5 с необходимым набором сетевых интерфейсов, выведенных через блок 3 каналами 135 для подключения внешних потребителей. На таких блоках 5 размещаются электронные модули в заданной конфигурации:
– коммутационной матрицы российского производства, например, 1923КХ028 (АО «ПКК Миландр») или иностранного производства для обеспечения информационного обмена с внутренними потребителями по каналам 105 или внешними потребителями через блок 3 по каналам 100, 101, 110, 111, а также обеспечения функций информационной безопасности (фильтрация и блокировка трафика), агрегации и зеркалирования;
– ПЛИС российского производителя АО "Воронежский Завод Полупроводниковых Приборов-Сборка" серии 5576, 5576 или иностранного производства для размещения сконфигурированных цифровых электронных схем, описанных на языке описания аппаратуры (hardware description language, HDL), которые реализуют функции аппаратного ускорения обработки данных, заданных конечным пользователем без изменения платформы;
– ASIC отечественного (российского производства АО «ПКК Миландр») или иностранного производства: микроконтроллеры, микросхемы промышленных протоколов RS -232, RS-422, RS-485, CAN и другие;
– другие перспективные электронные модули.
Каждый блок 5 содержит хотя бы одну коммутационную матрицу, которая соединяется с ПЛИС и/или ASIC при их наличии, а также другими электронными модулями, входящими в состав блока 5. Информационный обмен осуществляется по интерфейсу Ethernet (105). Блок 1 управляет коммутационной матрицей посредством PCIe (105), низкоскоростных интерфейсов SPI, I2C, USB и другими поддерживаемыми конкретной матрицей соединениями (105). Канал 105 содержит потоки данных и управления, которые могут быть разделены на физическом уровне по разным каналам или посредством VLAN.
Изобретение также может информационно связываться каналами 110 и 111 с другими платформами 11 напрямую или через открытые сети передачи данных 12 с применением технологии защиты VPN.
Платформа в оснащении 10 также включает блок 9, являющийся кластером из заданного количества вычислительных модулей 8, каждый из которых построен на микропроцессоре с технологией ARM российского ВЕ-М1000 или иностранного производства, имеет необходимый набор оперативной и долговременной памяти и позволяет обрабатывать данные программным обеспечением, развернутом в виртуальной микросервисной среде.
Вычислительные модули 8 устанавливаются в материнскую плату и посредством высокоскоростной коммутационной матрицы 7, например, 1923КХ028 (АО «ПКК Миландр») или иностранного производства, соединяются между собой каналами Ethernet 108 по заданной топологии (проблемно-ориентированной конфигурации), сформированной оператором после его уведомлений сообщением от системы управления. Так образуется блок вычислителей 9, благодаря которому достигается эффективное функционирование платформы 10 и наращивание ее производительности. Управляет коммутационной матрицей в блоке 9 базовый блок 1 по каналу 105.
Вычислительных модулей 8 на плате может быть от 1 до 24 или более. Модули 8 могут добавляться и заменяться по мере необходимости в течении жизненного цикла платформы или кластера 13. Система управления блока 1 непрерывно отслеживает наличие и количественный состав модулей 8 и при обнаружении изменении предлагает оператору возможные варианты использования их функционала и задает указанную оператором конфигурацию.
Вывод сообщений оператору может быть реализован с помощью различных графических и не только приемов в интерфейсе блока 3, что очевидно специалисту в данной области техники.
Наличие в системе больше двух модулей 8 и сервис-ориентированного стека программного обеспечения повышает надежность платформы в целом путем автоматического перераспределения системой управления нагрузки с неисправных вычислительных модулей 8 на свободные. Также это справедливо и для повышения надежности функционирования самой системы управления, которая резервируется на двух модулях 8 при их наличии. При неисправности блока 1 система управления способна автоматически мигрировать на заранее определенный оператором модуль 8 с оповещением о выявленных проблемах, что позволит поддержать платформу в работоспособном состоянии до принятия мер по восстановлению работоспособности блока 1.
Вычислительные модули 8 предназначены для реализации одного или нескольких сетевых сервисов, таких как:
- система обнаружения вторжений (Intrusion Detection System, IDS);
- система предотвращения вторжений (Intrusion Prevention System, IPS);
- межсетевой экран нового поколения (Next-Generation Firewall, NGFW)
- виртуальная частная сеть (Virtual Private Network, VPN);
- веб-сервер;
- сервер баз данных;
- сетевых систем хранения данных (Network Attached Storage, NAS);
- другие пользовательские сервисы, способные функционировать в среде виртуализации.
Применение энергоэффективных микропроцессоров с архитектурой ARM в блоках 1 и 8 позволяет получить платформу с плотной компоновкой элементов и низкого энергопотребления, что в свою очередь позволяет размещать гибко сформированное решение в стандартных серверных и коммутационных стойках с высотой корпуса от 1U.
Система управления блока 1 по указанию оператора осуществляет задание топологии (проблемно-ориентированной конфигурации) соединения каналов 105, 108 данных и управления между блоками посредством интерфейса PCIe. Блок 1 управляет коммутационной матрицей 7 блока 9 посредством PCIe (105), низкоскоростных интерфейсов SPI, I2C, USB и другими поддерживаемыми конкретной матрицей соединений (105).
Так, применение в изобретении сервис-ориентированного стека программного обеспечения и системы управления позволяет объединить некоторое количество платформ 11 и образовать распределенную защищенную сеть передачи данных предприятия 13. А применяемая программно-аппаратная архитектура обеспечивает надежное функционирование кластера 13 при выходе из строя одной или нескольких платформ 11 или их составляющих. Это обеспечивается автоматическим перераспределением системой управления функций по модулям 8 платформы 10.
Система работает следующим образом.
После подачи по шине 102 электропитания на платформу в ней загружается операционная система со средой виртуализации и системой управления.
Если система управления определила, что это первый запуск, то запускается механизм обнаружения аппаратных модулей 1, 3, 5, 8, 11, проверка их работоспособности.
Если после запуска в систему добавляется или из нее удаляется коммутационный блок 5, блок 9 вычислительных модулей, вычислительный блок 8, платформа 11, то система управления определяет количество подключенных или удаленных модулей, блоков или компонентов.
Собранная информация отображается в CLI (Command Line Interface - интерфейс командной строки) и GUI (Graphic User Interface - графический пользовательский интерфейс) посредством блока интерфейсов 3. Оператор системы на основе полученных данных от системы управления конфигурирует оборудование:
- на имеющихся ресурсах разворачивает необходимы программные модули;
- конфигурирует коммутационные матрицы в заданной проблемно-ориентированной конфигурации;
- конфигурирует интерфейсы управления, при необходимости добавляет платформу в кластер 13;
- при наличии в платформе двух вычислительных модулей 8 или подключения к кластеру 13, при необходимости, настраивает возможность резервирования системы управления;
- осуществляет мониторинг состояния платформы, а при наличии нескольких (11) – всего кластера 13;
- осуществляет необходимые операции по перенастройке оборудования и программных модулей.
Например, оператор платформы 10 путем решения конкретной задачи на объекте может сконфигурировать коммутационную матрицу 7 так, чтобы поток данных шел последовательно через два блока 8, потом заводится на ПЛИС и ASIC блока 5 и далее через блок 8 на выход через блок 3.
На основе настроек оператора система управления задает топологию путем формирования низкоуровневых команд управления коммутационными матрицами блока 5 и блока 9, которые в свою очередь формируют каналы передачи данных между блоками 1, 3, 5, 8 по заданной объектно-ориентированной топологии. Кроме того, система управления путем мониторинга запущенных программных блоков управляет ими.
Система управления также осуществляет проверку работоспособности программно-аппаратных модулей.
При выявлении проблем в функционировании одного из программных модулей в микросервисной среде, в том числе и системы управления, в автоматическом режиме осуществляется его перезапуск. В случае, если это не помогло или узел неисправен (аппаратный сбой), то разворачивание программного обеспечения происходит на доступных узлах в пределах платформы или кластера 13.
Информация о предпринятых системой управления мерах выводится в CLI и GUI. Оператор платформы или кластера 13 предпринимает необходимые действия для ее восстановления:
- при аппаратном сбое меняет неисправный узел или платформу;
- при необходимости в ручном режиме переконфигурирует платформу.
Платформа по настоящему изобретению реализуется с помощью известных и очевидных для специалиста в данной области техники средств и методов.
Таким образом, использование изобретения обеспечит повышение гибкости и отказоустойчивости платформы для построения систем управления, передачи и обработки данных за счет возможности изменения ее конфигурации и распределения вычислительной нагрузки по имеющимся компонентам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Высокопроизводительная вычислительная платформа на базе процессоров с разнородной архитектурой | 2016 |
|
RU2635896C1 |
| БОРТОВАЯ РЕКОНФИГУРИРУЕМАЯ СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И ДИАГНОСТИКИ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2604438C1 |
| АРХИТЕКТУРА МИКРОПРОЦЕССОРА С ФУНКЦИЕЙ АВТОМАТИЧЕСКОГО ПРОГРАММИРОВАНИЯ МИКРОКОНТРОЛЛЕРОВ | 2017 |
|
RU2675045C1 |
| Плата системная вычислительного модуля | 2024 |
|
RU2822305C1 |
| Плата системная вычислительного модуля | 2024 |
|
RU2840229C1 |
| ЗАЩИЩЕННЫЙ КОМПЬЮТЕР, СОХРАНЯЮЩИЙ РАБОТОСПОСОБНОСТЬ ПРИ ПОВРЕЖДЕНИИ | 2015 |
|
RU2591180C1 |
| Способ идентификации паттернов объекта и устройство для его реализации | 2022 |
|
RU2791825C1 |
| СИСТЕМА И СПОСОБ ВИРТУАЛИЗАЦИИ ФУНКЦИИ МОБИЛЬНОЙ СЕТИ | 2014 |
|
RU2643451C2 |
| СПОСОБ И СИСТЕМА ИНТЕГРАЦИИ ИНФОРМАЦИОННЫХ РЕСУРСОВ ПРЕДПРИЯТИЯ | 2019 |
|
RU2744566C1 |
| СИСТЕМА КОМПЬЮТЕРНОГО ЗРЕНИЯ В РИТЕЙЛЕ | 2022 |
|
RU2785327C1 |
Изобретение относится к области компьютерных сетевых технологий, а именно к платформам для построения систем управления, передачи и обработки данных в вычислительных сетях. Технический результат заключается в повышение гибкости платформы для построения систем управления, передачи и обработки данных за счет возможности изменения ее конфигурации и распределения вычислительной нагрузки по имеющимся компонентам. Технический результат достигается за счет платформы, которая содержит блок питания, блок интерфейсов и базовый вычислительный блок, построенный на микропроцессоре с архитектурой ARM и имеющий микросервисную среду функционирования программных модулей, среди которых система управления. Посредством системы управления базовый блок определяет наличие подключения по меньшей мере одного коммутационного блока и содержание в нем одной или нескольких ПЛИС и одной или нескольких ASIC, наличие подключения к коммутационному блоку блока вычислительных модулей, построенных на микропроцессоре с архитектурой ARM, далее при наличии подключения выдает сообщение оператору о возможности их применения и затем задает топологию по указанной оператором конфигурации. 4 з.п. ф-лы, 1 ил.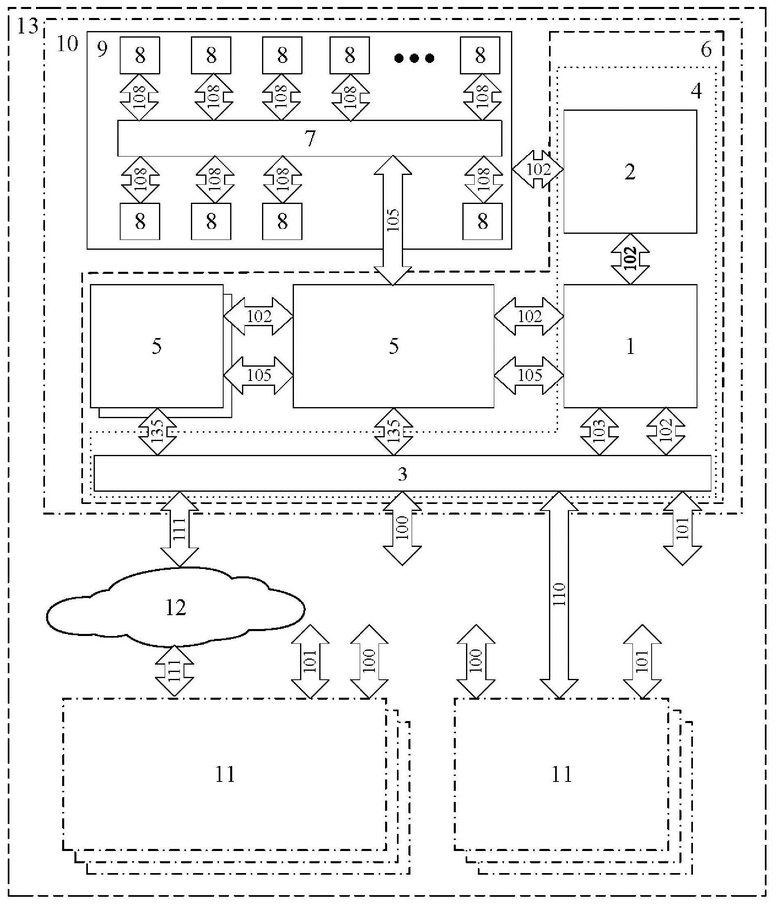
1. Платформа для построения систем управления, передачи и обработки данных в вычислительных сетях, содержащая базовый вычислительный блок (1), построенный на микропроцессоре с архитектурой ARM, блок питания (2) и блок интерфейсов (3), отличающаяся тем, что базовый блок (1) имеет микросервисную среду функционирования программных модулей, выполняющих сетевые и пользовательские функций, а также функции системы управления, посредством которой блок (1) выполнен с возможностью следующего:
определения наличия подключения по меньшей мере одного коммутационного блока (5) и определения содержания в нем одной или нескольких ПЛИС и одной или нескольких ASIC, далее при наличии подключения выдачи сообщения оператору о возможности их применения, затем задания топологии по указанной оператором конфигурации,
определения наличия подключения к коммутационному блоку (5) блока (9) вычислительных модулей, содержащего установленные на материнской плате коммутационную матрицу (7) и по меньшей мере один построенный на микропроцессоре с архитектурой ARM вычислительный модуль (8) с микросервисной средой функционирования программных модулей, далее при наличии подключения выдачи сообщения оператору о возможности применения модулей (8), затем задания топологии по указанной оператором конфигурации, а при наличии в подключенном блоке (9) двух вычислительных модулей (8) резервирования на них системы управления.
2. Платформа по п.1, отличающаяся тем, что базовый блок (1) посредством системы управления также выполнен с возможностью осуществления проверки работоспособности программных модулей в микросервисной среде на подключенных вычислительных модулях (8) и базовом блоке (1) и в случае обнаружения неисправности в работе программных модулей осуществления перезапуска блока (1) или соответствующих одного или нескольких модулей (8), а если неисправность заключается в работоспособности соответствующих одного или нескольких модулей (8), то выполнения разворачивания работы программных модулей на других одном или нескольких вычислительных модулях (8) и выдачи сообщения оператору о соответствующей неисправности.
3. Платформа по п.1, отличающаяся тем, что базовый блок (1) посредством системы управления также выполнен с возможностью осуществления проверки работоспособности подключенного по меньшей мере одного коммутационного блока (5) и при обнаружении его неисправности выдачи соответствующего сообщения пользователю.
4. Платформа по п.1, отличающаяся тем, что базовый блок (1) посредством системы управления также выполнен с возможностью осуществления проверки работоспособности содержащихся в коммутационном блоке (5) одной или нескольких ПЛИС и/или одной или нескольких ASIC и при обнаружении неисправности выдачи соответствующего сообщения пользователю.
5. Платформа по п.1, отличающаяся тем, базовый блок (1) посредством системы управления также выполнен с возможностью определения подключения к блоку интерфейсов (3) других платформ (11) для построения систем управления, передачи и обработки данных в вычислительных сетях и в случае наличия подключения формирования единой распределенной системы управления передачи и обработки данных в вычислительных сетях.
| Высокопроизводительная вычислительная платформа на базе процессоров с разнородной архитектурой | 2016 |
|
RU2635896C1 |
| Разрядник | 1945 |
|
SU66836A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

