Изобретение относится к области бортовой контрольно-измерительной и вычислительной техники космических аппаратов (КА) и может быть использовано для организации контрольно-диагностического обеспечения служебной и целевой радиоэлектронной аппаратуры КА, осуществляющей информационное взаимодействие через шину мультиплексного канала обмена (МКО-1). Техническим результатом предлагаемой системы является повышение гибкости алгоритмов контроля и диагностики бортовой аппаратуры КА с одновременным расширением функциональных возможностей бортовой системы контроля и диагностики (СКД).
Из уровня техники известны программные СКД, устанавливаемые в отказоустойчивых бортовых цифровых вычислительных машинах (БЦВМ) бортовых систем управления (БСУ) КА и реализующие алгоритмы контроля и диагностики внутренних и смежных бортовых систем КА программным образом (см. патент на изобретение РФ №2439674, МПК G06F 15/16, опубл. 10.01.2012; патент на изобретение РФ №2449352, МПК G06F, опубл. 27.04.2014). Помимо контроля и диагностики смежных систем КА посредством программных СКД осуществляется реконфигурация БЦВМ при отказе одной из рабочих вычислительных граней в БСУ таких КА, как «Монитор-Э», «КазСат», «Экспресс-МД1», «Электро-Л» и «Спектр-Р» (см. Бровкин А.Г., Бурдыгов Б.Г., Гордийко СВ. и др. Бортовые системы управления космическими аппаратами. / Под ред. проф. А.С. Сырова-М.: Изд-во «МАИ-ПРИНТ», 2010, с. 29). Связь БСУ со смежными бортовыми системами КА осуществляется по мультиплексному каналу обмена (МКО-1) в соответствии с ГОСТ Р 52070-2003.
Недостатком известных из уровня техники программных бортовых СКД является низкая гибкость алгоритмов контроля и диагностики в процедурах анализа и идентификации неисправностей бортовых систем КА с заданной степенью (глубиной) точности. Ограниченные функциональные возможности программных СКД обусловлены в значительной степени отсутствием в составе штатного программного контрольно-диагностического обеспечения частных контрольно-диагностических алгоритмов, способных идентифицировать аппаратно-программные неисправности и отказы в высокоинтегрированных подсистемах КА.
Известна концепция реконфигурируемых вычислительных систем (РВС) (см. Каляев И.А., Левин И.И., Семерников Е.А., Шмойлов В.И. Реконфигурируемые мультиконвейерные вычислительные структуры / Изд. 2-е, перераб. и доп. / Под общ. Ред. И.А. Каляева. - Ростов-на-Дону: Изд-во ЮНЦ РАН, 2009, с. 4-5), в которой имеется ряд способов аппаратной реализации единого реконфигурируемого вычислительного поля (РВП) на базе матричного поля программируемых логических интегральных схем (ПЛИС). Одним из способов реализации РВС, использующих наборы простейших микроопераций на базе однобитных процессорных элементов, является построение мультимикроконвейерной вычислительной структуры, представляющей собой однородную вычислительную среду (ОВС) (см. Каляев И.А., Левин И.И., Семерников Е.А., Шмойлов В.И. Реконфигурируемые мультиконвейерные вычислительные структуры / Изд. 2-е, перераб. и доп. / Под общ. Ред. И.А. Каляева. - Ростов-на-Дону: Изд-во ЮНЦ РАН, 2009, с. 41). В свою очередь, архитектура любой ПЛИС класса FPGA также представляет собой матричную ОВС с реконфигурируемыми связями между вычислительными ячейками, в качестве которых выступают коммутируемые логические блоки (КЛБ), реализующие элементарные (базовые) логико-арифметические операции. Более того, РВС всегда можно получить путем объединения вычислительного ресурса нескольких ПЛИС в единое (как правило, матричное) РВП, в котором загрузка аппаратной конфигурации для каждой ПЛИС будет осуществляться через ее собственный загрузчик конфигурационных данных.
Наиболее близкой с точки зрения способа организации РВП к предлагаемому изобретению является однородная вычислительная среда с двуслойной программируемой архитектурой (см. патент на изобретение РФ №2134448, МПК G06F 15/16, G06F 7/00, опубл. 10.08.1999). Прототип представляет собой аппаратную вычислительную структуру, состоящую из двух основных частей: матрицы вычислительных ячеек ОВС и матрицы запоминающих ячеек однородной запоминающей среды (ОЗС). Подключение источников и приемников информации осуществляется через устройства ввода-вывода с предусмотренной возможностью использования регистровых запоминающих устройств. Недостатком данной аппаратной архитектуры является общая функциональная сложность, связанная с необходимостью разделения общего ресурса единого вычислительного поля на два фрагмента: поле ОВС и поле однородной запоминающей среды (ОЗС).
Избежать данного недостатка предлагается путем построения единого РВП на базе матричного поля ПЛИС преимущественно класса FPGA. При этом фрагменты реконфигурируемой архитектуры единого вычислительного поля предлагается не отводить для реализации ОЗС.
В качестве ПЛИС, реализующего единое РВП, предлагается использовать отечественную электронную компонентную базу 5576ХС1Т, 5576ХС1Т1, 5576ХС2Т, 5576ХС3Т или 5576ХС4Т, аппаратная архитектура которых представляет собой матричное поле КЛБ (логических вентилей), управление связями (конфигурацией) между которыми осуществляется за счет внешней загрузочной конфигурационной программы с возможностью многократного перепрограммирования. Единое РВП предлагается практически реализовать на базе нескольких ПЛИС, образуя тем самым объединенное матричное поле ПЛИС, число которых будет полностью определяться исходя из объема вычислительных операций, требуемых при аппаратной реализации алгоритмов контроля и диагностики бортовых систем КА.
Решаемой в предлагаемой бортовой реконфигурируемой системе встроенного контроля и диагностики (СВКД) технической задачей является организация контрольно-диагностического обеспечения служебных и целевых систем КА на базе единого РВП с использованием схемы встроенного контроля бортовых систем КА.
Технический результат достигается тем, что все алгоритмы контроля и диагностики, выполняющие обработку контрольно-диагностической диагностической информации и формирование тестов, реализуются полностью на базе выделенных фрагментов РВП СВКД. Каждый из фрагментов РВП может глубоким образом перестраиваться в процессе анализа и идентификации технического состояния бортовых систем КА с заданной степенью точности. Ключевым достоинством предлагаемой системы является возможность адаптации аппаратной архитектуры РВП СВКД под информационную структуру решаемых задач, в качестве которых в данном случае выступает аппаратная реализация широкого спектра методов и средств бортового диагностирования КА.
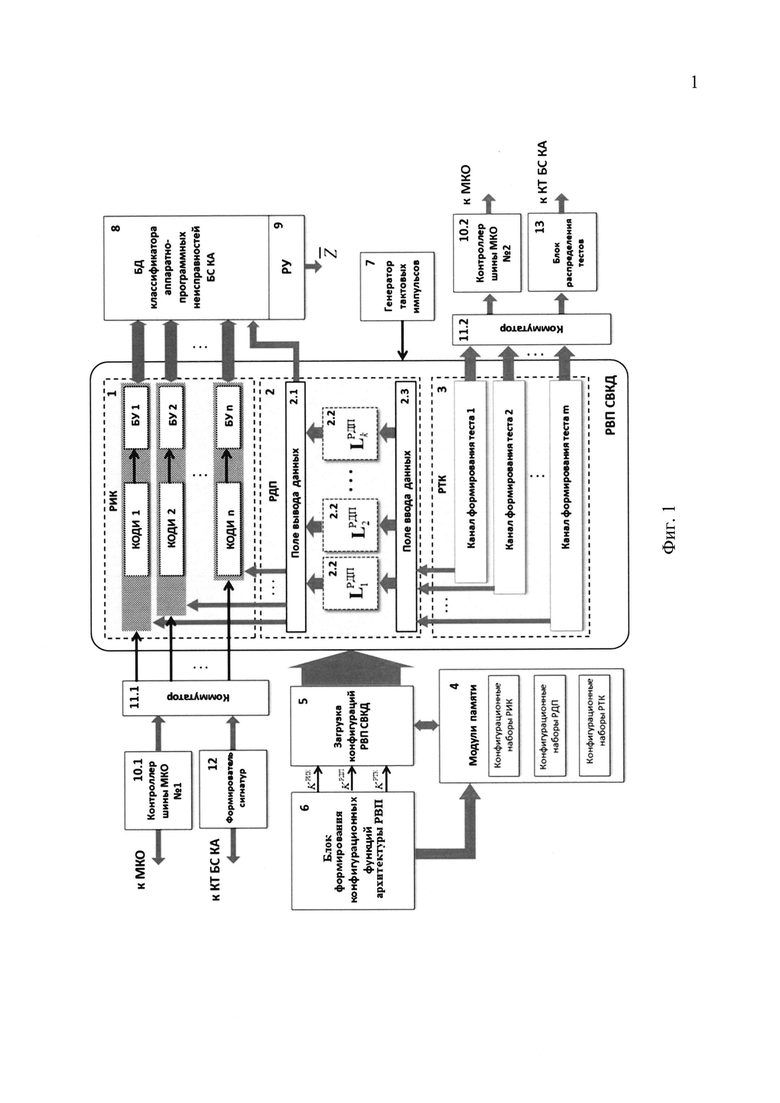
Фиг. 1 иллюстрирует структурную организацию предлагаемой бортовой реконфигурируемой СВКД КА. В состав предлагаемой по данному техническому решению бортовой реконфигурируемой СВКД КА входит единое РВП (поз. 1), реализованное на базе поля ПЛИС. РВП в свою очередь делится на три основные вычислительные области:
1) область реконфигурируемых измерительных каналов (РИК) (поз. 2);
2) область реконфигурируемого дублирующего поля (РДП) (поз. 9);
3) область реконфигурируемых тестовых каналов (РТК) (поз. 15).
Реконфигурируемая СВКД помимо РВП включает также два контроллера шины (КШ) МКО-1 (поз.25 и поз.28), модули памяти SDRAM (поз. 19), осуществляющие хранение конфигурационных наборов РИК, РДП и РТК, блок загрузки конфигураций РВП СВКД (поз. 20), формирователь конфигурационных функций (поз. 21), генератор тактовых импульсов (поз. 22), базу данных классификатора аппаратно-программных неисправностей бортовых систем КА (поз. 23), решающее устройство (поз. 24), два многоканальных коммутатора (поз. 26 и поз. 27), формирователь сигнатур (поз. 30), блок распределения тестов (поз. 29).
В области РИК реализуются n независимых диагностических каналов, каждый из которых, в свою очередь, состоит из канала обработки диагностической информации (КОДИ) (поз. 3, 4, 5) и буферного устройства (БУ) (поз. 6, 7, 8). Посредством КОДИ осуществляется основная обработка диагностической информации, поступающей от бортовых систем КА по шине мультиплексного канала обмена (МКО-1) через контроллер шины МКО №1 (поз. 25). Внешний относительно РВП СВКД формирователь сигнатур (поз. 30) совместно с коммутатором (поз.26) обеспечивают возможность проведения контроля и диагностики бортовых систем КА путем сигнатурного анализа данных от постоянного набора контрольных точек, предусмотренного при организации схемы встроенного контроля каждой бортовой системы КА. При этом сам формирователь сигнатур предлагается реализовать на базе 16-разрядных микроконтроллеров 1874 ВЕ66Т, имеющих до 64 линий ввода-вывода данных.
В зависимости от значения конфигурационной функции КРИК, описывающей аппаратную архитектуру каждого КОДИ, на базе последнего может быть реализован либо логический анализатор (диагностика преимущественно программной составляющей бортовых систем КА), либо сигнатурный анализатор (диагностика преимущественно аппаратной составляющей бортовых систем КА). Каждый КОДИ через БУ осуществляет сопоставление регистрируемых данных (сигнатур) с эталонными данными (сигнатурами), хранящимися во внешней пополняемой базе данных (БД) классификатора аппаратно-программных неисправностей бортовых систем КА (поз. 23). БД реализуется программным образом, поэтому хранение значений эталонных сигнатур осуществляется в постоянном запоминающем устройстве (ПЗУ) БЦВМ. Конечным результатом сопоставления регистрируемых и эталонных данных является сформированный в решающем устройстве (РУ) (поз. 24) вектор технического состояния бортовой системы КА  . На основе оценки параметров вектора определяются как условная глубина неисправности или отказа той или иной бортовой системы КА, так и эффективность выбранного алгоритма обработки диагностической информации в КОДИ и на фрагменте РИК в целом. РУ представляет собой специализированное программное обеспечение (СПО), входящее в состав ПО БЦВМ, которое реализует автоматическое принятие решения о состоянии бортовой системы КА на основе предварительно выбранного критерия принятия решения. Последний, в свою очередь, определяется наземными целеуказаниями, поступающими с наземного комплекса управления (НКУ), и может корректироваться в течение всего срока активного существования КА.
. На основе оценки параметров вектора определяются как условная глубина неисправности или отказа той или иной бортовой системы КА, так и эффективность выбранного алгоритма обработки диагностической информации в КОДИ и на фрагменте РИК в целом. РУ представляет собой специализированное программное обеспечение (СПО), входящее в состав ПО БЦВМ, которое реализует автоматическое принятие решения о состоянии бортовой системы КА на основе предварительно выбранного критерия принятия решения. Последний, в свою очередь, определяется наземными целеуказаниями, поступающими с наземного комплекса управления (НКУ), и может корректироваться в течение всего срока активного существования КА.
С помощью области РДП (поз. 9) осуществляется диагностика дискретных элементов бортовых систем КА методом эквивалентного дублирования аппаратуры. Это достигается путем создания необходимой эталонной конфигурации цифровых устройств в одной из выделенных матриц КЛБ дублирующего поля  (поз. 11, 12, 13), где
(поз. 11, 12, 13), где  - условный порядковый номер матричного набора КЛБ в РДП. Из фиг. 1 видно, что анализ данных, полученных в результате диагностирования дискретных элементов аппаратных подсистем КА методом эквивалентного дублирования, может осуществляться как напрямую (через БД классификатора аппаратно-программных неисправностей КА (поз. 23)), так и через область РИК (поз. 2). В обоих случаях тестовые воздействия формируются в вычислительной области РТК (поз. 15). Поле ввода данных (поз. 10) и поле вывода данных (поз. 14) предназначены для перераспределения данных (стимулирующих и тестовых воздействий), поступающих от каналов формирования тестов в поля формирования эталонных дискретных цифровых устройств и в КОДИ. Поля ввода и вывода данных реализуются на базе глобальных коммутаторов, осуществляющих управление связями между КЛБ в конфигурационных секциях ПЛИС.
- условный порядковый номер матричного набора КЛБ в РДП. Из фиг. 1 видно, что анализ данных, полученных в результате диагностирования дискретных элементов аппаратных подсистем КА методом эквивалентного дублирования, может осуществляться как напрямую (через БД классификатора аппаратно-программных неисправностей КА (поз. 23)), так и через область РИК (поз. 2). В обоих случаях тестовые воздействия формируются в вычислительной области РТК (поз. 15). Поле ввода данных (поз. 10) и поле вывода данных (поз. 14) предназначены для перераспределения данных (стимулирующих и тестовых воздействий), поступающих от каналов формирования тестов в поля формирования эталонных дискретных цифровых устройств и в КОДИ. Поля ввода и вывода данных реализуются на базе глобальных коммутаторов, осуществляющих управление связями между КЛБ в конфигурационных секциях ПЛИС.
Область РТК (поз. 15) представляет собой многоканальный реконфигурируемый формирователь функциональных и параметрических тестов для бортовых систем КА, каждый из которых реализуется аппаратным образом в одном из m каналов формирования тестов (поз. 16, 17, 18) и полностью описывается конфигурационной функцией КРТК. Выдача тестовых сигналов, которые в процессе идентификации технического состояния бортовых систем КА могут корректироваться, осуществляется через независимый КШ МКО №2 (поз. 28). Посредством коммутатора (поз. 27) и блока распределения тестов (поз. 29) обеспечивается возможность прямого тестирования бортовых систем КА, которая достигается за счет заранее предусмотренного доступа к контрольным точкам бортовых систем без использования шины МКО-1. Для предлагаемой системы в качестве блока распределения тестов рекомендуется использовать скоростной интерфейс передачи данных RS-485. С другой стороны вполне возможен вариант прямого гальванического доступа к ограниченному набору контрольных точек на промежуточных участках цифровой обработки информации бортовых систем, что, однако, существенно усложнит общую организацию бортовой кабельной сети КА.
Организация контрольно-диагностического обеспечения КА на базе единого РВП удобна, прежде всего, возможностью описания абсолютно всех алгоритмов контроля и диагностики, реализуемых посредством бортовой реконфигурируемой СВКД, с помощью множества орграфов  ,
,  , каждый из которых соответствует собственной аппаратной архитектуре того или иного алгоритма, реализованного в предварительно выделенном фрагменте РВП СВКД. Вершинами каждого r-го орграфа G{F,X), описывающего аппаратную реализацию (архитектуру) алгоритма диагностики (или контроля) в РВП СВКД, являются функциональные блоки
, каждый из которых соответствует собственной аппаратной архитектуре того или иного алгоритма, реализованного в предварительно выделенном фрагменте РВП СВКД. Вершинами каждого r-го орграфа G{F,X), описывающего аппаратную реализацию (архитектуру) алгоритма диагностики (или контроля) в РВП СВКД, являются функциональные блоки  , реализуемые посредством КЛБ, где t - порядковый номер КЛБ-вершины, a ν - базовая логико-арифметическая функция, определяемая типом ПЛИС. Дуга
, реализуемые посредством КЛБ, где t - порядковый номер КЛБ-вершины, a ν - базовая логико-арифметическая функция, определяемая типом ПЛИС. Дуга  определяет направление и последовательность вычислительных операций внутри орграфа G(F, X), или, иными словами, определяет алгоритм вычислений путем строго заданной аппаратной конфигурации выделенного фрагмента РВП СВКД.
определяет направление и последовательность вычислительных операций внутри орграфа G(F, X), или, иными словами, определяет алгоритм вычислений путем строго заданной аппаратной конфигурации выделенного фрагмента РВП СВКД.
Конфигурационную функцию любого из выделенных в пределах матричного набора КЛБ функциональных фрагментов РВП СВКД всегда можно представить в виде следующей зависимости
где Lh - матричный набор КЛБ, реализующий h-й функциональный фрагмент РВП СВКД, который, в свою очередь, можно записать как
где q - условный аппаратный уровень функционального элемента в РВП СВКД (в данном случае q=1),  - логико-арифметическая функция, реализуемая посредством КЛБ, расположенного в i-ой строке и j-ом столбце матрицы
- логико-арифметическая функция, реализуемая посредством КЛБ, расположенного в i-ой строке и j-ом столбце матрицы  , γij - функция включения (задействования) КЛБ в вычислительной операции и описываемая выражением
, γij - функция включения (задействования) КЛБ в вычислительной операции и описываемая выражением

В данном случае орграф G(Lh) описывает топологию логико-арифметических связей между КЛБ-вершинами в матрице Lh, задавая тем самым необходимую для h-го алгоритма (или его части) аппаратную конфигурацию выделенного функционального фрагмента в РВП СВКД.
В изображенных на фиг.1 внешних относительно РВП СВКД модулях памяти (SDRAM) (поз. 19) хранятся конфигурационные наборы аппаратных архитектур трех основных фрагментов РВП СКД, реализующих штатное контрольно-диагностическое обеспечение бортовых систем КА с известными признаками аппаратно-программных неисправностей: конфигурационные наборы РИК, конфигурационные наборы РДП, конфигурационные наборы РТК. В процессе анализа и идентификации технического состояния бортовых систем в течение всего срока активного существования КА бортовая реконфигурируемая СВКД может пополняться как новыми конфигурационными наборами аппаратных архитектур РВП, так и новыми признаками аппаратно-программных неисправностей основных бортовых систем КА. Признаки аппаратно-программных неисправностей, в свою очередь, хранятся в ПЗУ БЦВМ, входящей в состав БСУ КА.
Управление тактированием РВП СВКД осуществляется внешним генератором тактовых импульсов (поз. 22). Загрузка конфигураций РВП СВКД осуществляется внешним относительно РВП СВКД набором микроконтроллеров (или микропроцессоров), определяемых выбранным для реализации единого РВП типом ПЛИС. Вся совокупность микроконтроллеров, отведенных для загрузки конфигураций РВП СВКД, условно обозначена на фиг.1 в виде блока (поз. 20) загрузки конфигураций РВП СВКД. Под формирователем конфигурационных функций (поз.21) КРИК, КРДП и КРТК условно обозначена вся совокупность методических операций, связанных с выбором и расчетом контрольно-диагностических моделей боровых систем КА, описываемых соответствующими конфигурационными функциями и реализуемыми аппаратным образом в РВП СВКД.
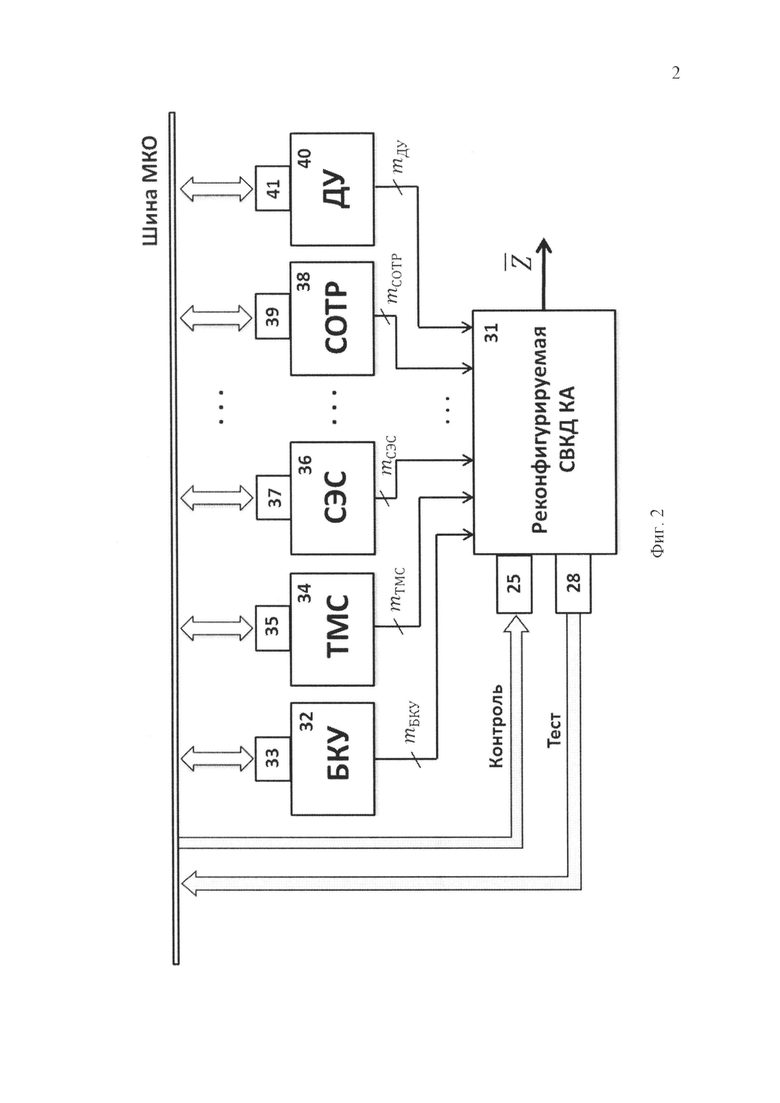
Организация контрольно-диагностического обеспечения бортовых систем КА по схеме встроенного контроля поясняется на фиг. 2. Схема встроенного контроля бортовых систем КА предполагает наличие доступа реконфигурируемой СВКД КА (поз. 31) к некоторому фиксированному набору контрольных точек каждой из бортовых систем КА: mБКУ - набор контрольных точек бортового комплекса управления (БКУ) (поз. 32); mТМС - набор контрольных точек телеметрической системы (ТМС) (поз. 34); mСЭС - набор контрольных точек системы энергоснабжения (СЭС) (поз. 36); mСОТР - набор контрольных точек системы обеспечения температурного режима (СОТР) (поз. 38); mДУ - набор контрольных точек от датчиков и регулирующей электронной аппаратуры двигательной установки (ДУ) (поз. 40).
Независимо от особенностей аппаратно-программного построения каждой из бортовых систем КА, все они осуществляют взаимодействие по МКО-1 через собственный КШ: БКУ (поз. 32) через КШ, изображенный в поз. 33; ТМС (поз. 34) через КШ, изображенный в поз. 35; СЭС (поз. 36) через КШ, изображенный в поз. 37; СОТР (поз.38) через КШ, изображенный в поз. 39; ДУ (поз. 40) через КШ, изображенный в поз. 41. При этом, как было отмечено выше, каналы формирования тестов и КОДИ используют независимые каналы доступа к контрольным точкам бортовых систем КА, которые могут быть реализованы как с помощью отдельных высокоскоростных интерфейсов обмена данными, таких как RS-485, так и с помощью прямого (гальванического) доступа по изолированным кабельным каналам. Определяющим фактором в выборе способа доступа к контрольным точкам будут являться параметры цифровых сигналов, регистрируемых в контрольных точках бортовых систем КА, и общее усложнение бортовой кабельной сети.
Организация встроенного контроля бортовых систем КА параллельно с возможностью подключения к шине МКО-1 позволяет посредством реконфигурируемой СВКД осуществлять как контроль, так и тестирование отдельно взятых фрагментов аппаратных составляющих бортовых систем КА. Данный момент является очень важным ввиду возможности отказа или появления неисправности в одном из КШ МКО-1, через который и осуществляется взаимодействие каждой отдельно взятой бортовой системы КА.
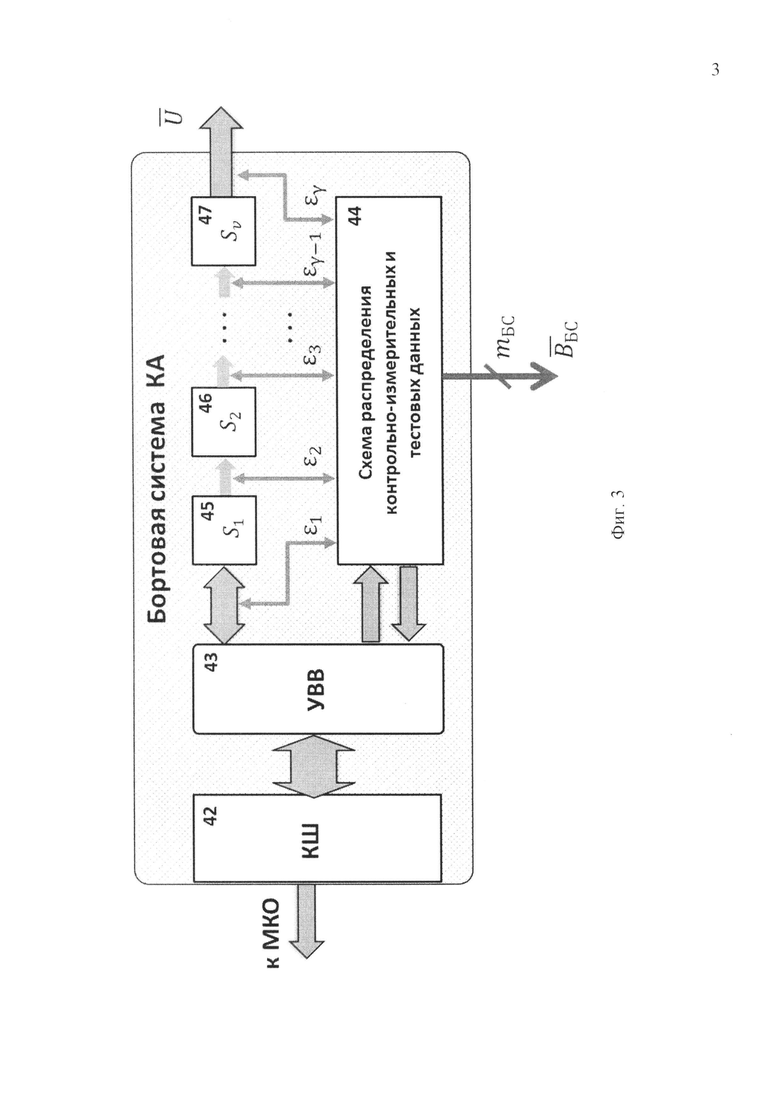
Фиг. 3 иллюстрирует упрощенную структурную организацию любой бортовой системы КА, обеспечивающую доступ к промежуточным участкам цифровой обработки информации Sl, S2, … ,Sν (поз. 45, 46, 47) с помощью схемы встроенного контроля.
Из фиг. 3 видно, что схема встроенного контроля построена таким образом, чтобы обеспечить взаимодействие бортовой системы КА с реконфигурируемой СВКД как по набору контрольных точек бортовой системы mБС, образующих вектор контрольно-измерительных и тестовых данных  , так и по каналу МКО через устройство ввода-вывода (УВВ) (поз. 43), связанное непосредственно с КШ (поз. 42). Схема распределения контрольно-измерительных и тестовых данных (поз.44) кроме регистрации сигнатур и уровней логических напряжений в точках ε1, ε2, ε3, …, εγ-1, εγ обеспечивает также и выдачу тестовых воздействий на промежуточные участки цифровой обработки информации S1, S2, …, Sν бортовых систем КА.
, так и по каналу МКО через устройство ввода-вывода (УВВ) (поз. 43), связанное непосредственно с КШ (поз. 42). Схема распределения контрольно-измерительных и тестовых данных (поз.44) кроме регистрации сигнатур и уровней логических напряжений в точках ε1, ε2, ε3, …, εγ-1, εγ обеспечивает также и выдачу тестовых воздействий на промежуточные участки цифровой обработки информации S1, S2, …, Sν бортовых систем КА.
Именно схема распределения контрольно-измерительных и тестовых данных, реализуемая на базе нескольких мультиплексоров, образует схему встроенного контроля той или иной бортовой системы КА. При этом функциональный контроль бортовых систем посредством реконфигурируемой СВКД заключается в анализе итогового вектора управляющих воздействий  .
.
Таким образом, предлагаемая реконфигурируемая СВКД КА позволит в значительной степени повысить гибкость алгоритмов контроля и диагностики бортовой аппаратуры КА и одновременно расширить общие функциональные возможности бортовой СКД, требуемые при анализе и идентификации технического состояния бортовых систем КА с заданной степенью точности.
Источники информации
1) Патент на изобретение РФ №2439674, МПК G06F 15/16, опубл. 10.01.2012.
2) Патент на изобретение РФ №2449352, МПК G06F, опубл. 27.04.2014.
3) Бровкин А.Г., Бурдыгов Б.Г., Гордийко С.В. и др. Бортовые системы управления космическими аппаратами. / Под ред. проф. А.С. Сырова - М.: Изд-во «МАИ-ПРИНТ», 2010.
4) ГОСТ Р 52070-2003.
5) Каляев И.А., Левин И.И., Семерников Е.А., Шмойлов В.И. Реконфигурируемые мультиконвейерные вычислительные структуры / Изд. 2-е, перераб. и доп. / Под общ. Ред. И.А. Каляева. - Ростов-на-Дону: Изд-во ЮНЦ РАН, 2009.
6) Патент на изобретение РФ №2134448, МПК G06F 15/16, G06F 7/00, опубл. 10.08.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПРИБОРАМИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2653243C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СВОЕВРЕМЕННОСТИ СВЯЗИ | 2017 |
|
RU2646598C1 |
| Универсальная объектно-ориентированная мультиплатформенная система автоматической диагностики и мониторинга для управления состоянием и предупреждения аварий оборудования опасных производственных и транспортных объектов | 2019 |
|
RU2728167C1 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| СПОСОБ ДИАГНОСТИКИ КОМПЛЕКСА ТЕСТИРОВАНИЯ ВСТРОЕННОГО ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2023 |
|
RU2802712C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ВЫЧИСЛЕНИЯ ПРЯМЫХ ТРИГОНОМЕТРИЧЕСКИХ ФУНКЦИЙ | 2004 |
|
RU2326427C2 |
| СПОСОБ РАЗРАБОТКИ И ИСПЫТАНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И МОБИЛЬНЫЙ СТЕНД ДЛЯ ТЕСТИРОВАНИЯ ЭЛЕКТРОННОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 2020 |
|
RU2755027C1 |
| Автоматизированная контрольно-проверочная аппаратура интегрированной информационно-управляющей системы беспилотного летательного аппарата | 2017 |
|
RU2657728C1 |
| Модуль центрального процессора промышленного контроллера | 2019 |
|
RU2703681C1 |
Изобретение относится к области бортовой контрольно-измерительной и вычислительной техники космических аппаратов (КА). Техническим результатом является возможность создания контрольно-диагностических средств обеспечения служебных и целевых систем КА на базе единого реконфигурируемого вычислительного поля (РВП) с использованием схемы встроенного контроля бортовых систем КА. Он достигается тем, что все алгоритмы контроля и диагностики, выполняющие обработку контрольно-диагностической информации и формирование тестов, реализуются полностью на базе выделенных фрагментов единого РВП. Алгоритмы контроля и диагностики бортовых систем КА, реализованные аппаратным образом на базе единого РВП, в процессе анализа и идентификации технического состояния бортовых систем КА могут глубоким образом перестраиваться, что совместно с использованием схемы встроенного контроля позволяет локализовать неисправности и отказы высокоинтегрированных бортовых подсистем КА с заданной степенью точности. 8 з.п. ф-лы, 3 ил.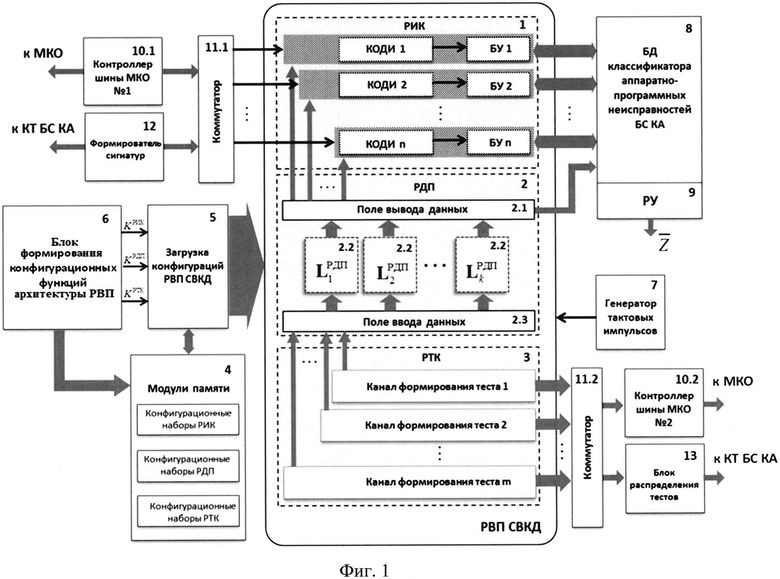
1. Бортовая реконфигурируемая система встроенного контроля и диагностики (СВКД) космического аппарата (КА), включающая единое реконфигурируемое вычислительное поле (РВП), построенное на базе матричного поля программируемых логических интегральных схем класса FPGA, общий вычислительный ресурс которого распределен на три основные вычислительные области: область реконфигурируемых измерительных каналов (РИК), область реконфигурируемого дублирующего поля (РДП) и область реконфигурируемых тестовых каналов (РТК), также включающая генератор тактовых импульсов, два контроллера шины МКО-1, модули памяти, осуществляющие хранение конфигурационных наборов РИК, РДП и РТК, блок загрузки конфигураций РВП СВКД, блок формирования конфигурационных функций архитектуры РВП, описывающих особенности аппаратных архитектур вычислительных областей РВП СВКД и соответствующих контрольно-диагностическим моделям бортовых систем КА, базу данных классификатора аппаратно-программных неисправностей бортовых систем КА, решающее устройство, представляющее собой специализированное программное обеспечение, являющееся частью программного обеспечения бортовой цифровой вычислительной машины КА, которое реализует автоматическое принятие решения о состоянии бортовых систем КА на основе предварительно выбранного критерия принятия решения, который определяется наземными целеуказаниями, поступающими с наземного комплекса управления (НКУ), и может корректироваться в течение всего срока активного существования КА, два многоканальных коммутатора, в которой встроенный контроль и диагностика КА обеспечиваются формирователем сигнатур совместно с коммутатором путем сигнатурного анализа данных от постоянного набора контрольных точек, предусмотренного при организации схемы встроенного контроля каждой бортовой системы КА и выдающего данные о состоянии каждой бортовой системы КА, и которая характеризуется тем, что позволяет осуществлять организацию контрольно-диагностического обеспечения служебных и целевых систем КА на основе возможности адаптации аппаратной архитектуры единого РВП СВКД под информационную структуру решаемых задач контроля и диагностики бортовых систем КА, что, в свою очередь, достигается тем, что все алгоритмы контроля и диагностики КА, выполняющие обработку контрольно-диагностической диагностической информации и формирование тестов, реализуются полностью на базе выделенных фрагментов РВП СВКД, каждый из которых за счет реконфигурации связей между конфигурируемыми логическими блоками может перестраиваться в пределах собственной области РВП в процессе анализа и идентификации технического состояния бортовых систем КА с заданной степенью точности, адаптируя тем самым архитектуру РВП к изменению и уточнению задач контроля и диагностики той или иной бортовой системы КА.
2. Система по п. 1, отличающаяся тем, что в области реконфигурируемых измерительных каналов (РИК) реализуются n независимых диагностических каналов, каждый из которых, в свою очередь, состоит из канала обработки диагностической информации (КОДИ) и буферного устройства (БУ), при этом посредством КОДИ осуществляется основная обработка диагностической информации, поступающей от бортовых систем КА по шине мультиплексного канала обмена (МКО-1) через контроллер шины МКО.
3. Система по пп. 1, 2, отличающаяся тем, что каждый КОДИ через БУ осуществляет сопоставление регистрируемых данных (сигнатур) с эталонными данными (сигнатурами), хранящимися во внешней пополняемой базе данных (БД) классификатора аппаратно-программных неисправностей бортовых систем КА.
4. Система по п. 1, отличающаяся тем, что конечным результатом сопоставления регистрируемых и эталонных данных является сформированный в решающем устройстве (РУ) вектор технического состояния бортовой системы КА 
5. Система по п. 1, отличающаяся тем, что с помощью области реконфигурируемого дублирующего поля (РДП) осуществляется диагностика дискретных элементов бортовых систем КА методом эквивалентного дублирования аппаратуры, причем поле ввода данных и поле вывода данных предназначены для перераспределения стимулирующих и тестовых воздействий, поступающих от каналов формирования тестов в поля формирования эталонных дискретных цифровых устройств и в КОДИ.
6. Система по п. 5, отличающаяся тем, что анализ данных, полученных в результате диагностирования дискретных элементов аппаратных подсистем КА методом эквивалентного дублирования, может осуществляться как напрямую через базу данных (БД) классификатора аппаратно-программных неисправностей КА, так и через область РИК, причем в обоих случаях тестовые воздействия формируются в вычислительной области РТК.
7. Система по п. 1, отличающаяся тем, что область реконфигурируемых тестовых каналов (РТК) представляет собой набор выделенных фрагментов реконфигурируемого вычислительного поля (РВП), каждый из которых реализует в одном из m каналов аппаратную архитектуру, генерирующую набор функциональных или параметрических тестов бортовых систем КА, причем выдача тестовых сигналов, которые в процессе идентификации технического состояния бортовых систем КА могут корректироваться, осуществляется через независимый контроллер шины (КШ) МКО №2.
8. Система по п. 1, отличающаяся тем, что во внешних относительно РВП СВКД модулях памяти хранятся конфигурационные наборы аппаратных архитектур трех основных фрагментов РВП СКД, реализующих штатное контрольно-диагностическое обеспечение бортовых систем КА с известными признаками аппаратно-программных неисправностей: конфигурационные наборы РИК, конфигурационные наборы РДП, конфигурационные наборы РТК, при этом в процессе анализа и идентификации технического состояния бортовых систем в течение всего срока активного существования КА модули памяти могут пополняться новыми конфигурационными наборами аппаратных архитектур РВП.
9. Система по п. 1, отличающаяся тем, что организация контрольно-диагностического обеспечения бортовых систем КА с помощью СВКД по схеме встроенного контроля предполагает наличие доступа реконфигурируемой СВКД КА к некоторому фиксированному набору контрольных точек каждой из бортовых систем КА, причем каналы формирования тестов и КОДИ используют независимые каналы доступа к контрольным точкам бортовых систем КА, которые могут быть реализованы как с помощью отдельных высокоскоростных интерфейсов обмена данными, так и с помощью прямого (гальванического) доступа к контрольным точкам по отдельным кабельным каналам бортовой кабельной сети КА.
| ОДНОРОДНАЯ ВЫЧИСЛИТЕЛЬНАЯ СРЕДА С ДВУСЛОЙНОЙ ПРОГРАММИРУЕМОЙ СТРУКТУРОЙ | 1998 |
|
RU2134448C1 |
| Способ защиты масла от плесневения и прогоркания | 1949 |
|
SU86332A1 |
| US2015097728 A1, 09.04.2015. | |||

